1. Introduction
In this paper, we apply the pseudospectral method based on Chebyshev cardinal functions to solve one-dimensional partial integro-differential equations (PIDEs)
with initial and boundary conditions
where
and
are constants and the functions
and
are assumed to be sufficiently smooth on
and
with
, respectively, as prescribed before and such that (
1) has a unique solution
. In addition, we assume that the kernel function is of diffusion type which is given by
and satisfies the Lipschitz condition as follows
where
is referred to as a Lipschitz constant.
In various fields of physics and engineering, systems are often functions of space and time and are described by partial differential equations. But in some cases, such a formulation can not accurately model this system. Because we can not take into account the effect of a past time when the system is a function of a given time. Such systems appear in heat transfer, thermoelasticity and nuclear reactor dynamics. This phenomenon has resulted in the inclusion of an integral term in the basic partial differential equation that leads to a PIDEs [
1]. The existence, uniqueness, and asymptotic behavior of the solution of this equation are discussed in [
2]. In this paper, we can find the physical situation that leads to Equation (
1). A Simple example that refers to a PIDEs is considered by Habetler and Schiffman [
3] where the compression of viscoelastic media is studied. For more applications, we refer readers to [
4,
5,
6,
7].
Spectral methods are schemes to discretize the PDEs. To this end, they utilize the polynomials to approximate the exact solution. Since any analytic function can be exponentially approximated by polynomials. In contrast to other methods such as finite elements and finite differences, these methods can achieve an infinite degree of accuracy. That’s mean the order of the convergence of the approximate solution is limited only by the regularity of the exact solution. In other words, for numerical simulations, fewer degrees of freedom are necessary to obtain a given accuracy. The Galerkin method is a class of spectral techniques that convert a continuous operator problem to a discrete problem. In other words, this scheme applies the method of variation of parameters to function space by transforming the equation to a weak formulation. To implement this method, we can not compute the integrals analytically. That’s why we can’t use this method in most cases [
8,
9]. Another method that is closely related to spectral methods is the pseudospectral method. The pseudospectral methods are a special type of numerical method that used scientific computing and applied mathematics to solve partial differential equations. These methods allow the representation of functions on a quadrature grid and cause simplification of the calculations [
10,
11].
Several techniques have been used to solve one-dimensional partial differential equations, such as the finite difference method, finite element method, and spectral method. In [
12], the Legendre-collocation method is used to solve the parabolic Volterra integro-differential equation. For an infinite domain, Dehghan et al. [
12] used the algebraic mapping to obtain a finite domain and then they utilized their proposed method. The Legendre multiwavelets collocation method is used to find the numerical solution of PIDEs [
13]. To find the approximate solution of PIDEs, Avazzadeh et al. [
14] applied the radial basis functions (RBFs) and finite difference method (FDM). To solve nonlinear parabolic PIDEs in one space variable, Douglas and Jones [
15] proposed backward difference and Crank-Nicolson type methods. Han et al. [
16] approximated the solution of (
1) with kernel function of diffusion type and on unbounded spatial domains using artificial boundary method. In [
17], a finite difference scheme is considered to solve PIDEs with a weakly singular kernel.
According to the above, considerable attention has been devoted to solving PIDEs numerically. In this paper, we introduce a simple numerical method with high accuracy. To this end, while introducing the Chebyshev cardinal functions, the pseudospectral method applies to obtain the approximate solution of PIDEs (
1). Generally, cardinal functions
are polynomials of a given degree that
vanishes at all interpolation grids except
. These bases are also called the shape functions, Lagrange basis, and so on. One of the advantages of using such bases is the reduction of calculations to find the expansion coefficients of a given function. In other words, to find the expansion coefficients based on these bases, there is no need to integrate, and this is due to the cardinality, which makes these bases superior to other functions. Laksetani and Dehghan [
18] is used Chebyshev cardinal functions to solve a PDE with an unknown time-dependent coefficient. In [
19], these functions are used to solve the fractional differential equation. Heydari [
20] described a new direct scheme for solving variable-order fractional optimal control problem via Chebyshev cardinal functions. For more details about the Chebyshev cardinal functions and their applications, we refer the reader to [
21,
22].
This paper is organized as follows,
Section 2 is devoted to a brief introduction to Chebyshev cardinal functions. In
Section 3, we presented an efficient and applicable method based on Chebyshev cardinal functions to solve PIDEs (
1). In
Section 4, the convergence analysis is investigated and we proved that the proposed method is convergence.
Section 5 is devoted to some numerical tests to show the ability ad accuracy of the method. Finally,
Section 6 contains a few concluding remarks.
2. Chebyshev Cardinal Functions
Given
, assume that
and
where
is the first kind Chebyshev function of order
on
. Recall that the Chebyshev grid is obtained by
To utilize the Chebyshev functions of any arbitrary interval
, one can apply the change the variable
to obtain the shifted Chebyshev functions, viz
Note that it is easy to show that the grids of shifted Chebyshev function is equal to .
A significant example of the cardinal functions for orthogonal polynomials is the Chebyshev cardinal functions. The cardinal Chebyshev functions of order
are defined as
where the subscript
x denotes
x-differentiation. It is obvious that the functions
are polynomials of degree
M which satisfy the condition
where
is the Kronecker
-function.
In view of (
9), the cardinal functions are nonzero at one and only one of the points
implies that for arbitrary function
, the function can be approximated by
Assume that
(Sobolev spaces) denotes the space of all functions
such that
for all
, where
is a nonnegative integer and
D is the derivative operator. Sobolov space
is equipped with a norm defined by
There exista a semi-norm that is defined as follows
It follows from [
23] that the error of expansion (
10) can be bounded by the following lemma.
Lemma 1. Let denotes shifted Gauss-Chebyshev points where and that can be approximated by via Then one can prove thatwhere C is a constant and independent of M. 3. Pseudospectral Method
In this section, we apply the pseudospectral method to solve PIDEs (
1) based on Chebyshev cardinal functions. Let us consider the partial integro-differential Equation (
1) on the region
. We introduce differential operator
and integral operator
Applying these operators, PIDEs (
1) can be rewritten in the operator form
Let the solution of (
1) is approximated by the polynomial
, via
If we define a matrix
W of dimension
whose
-th element is
, then Equation (
17) becomes the matrix problem
where the vector elements of
are the Chebyshev cardinal functions
.
Inasmuch as the Chebyshev cardinal functions are polynomial, it is easy to evaluate their derivatives. In view of (
17), one can write
where
is a vector of dimension
whose
i-th element is
. Similarly we have
where
is a vector of dimension
whose
i-th element is
. Suppose that
is the operational matrix of derivative whose
-th element is
. Thus, it follows from
that
and
It can easily be shown that
is approximated as follows
Thus, by substituting (
22) and (
23) into the differential part of desired Equation (
16), we can approximate the differential operator
(
14), via
To approximate the integral part, we assume that
where
is the operational matrix of integral. It follows from (
15) that
If we replace
w with
, then one can write
Assume that
can be approximated by
where
K is a matrix whose elements depend on
t and unknown coefficients
W. Replacing
into (
27), and using the operational matrix of integration
I, we get
where
-th element of matrix
Q is
. Substituting (
25) and (
28) into (
16), one can write
The Chebyshev cardinal functions
are orthogonal with respect to weighted inner product on
where
. This gives rise to equation
Let us rewrite this system as
We Replace the first column of (31) with the initial condition (2) and the first and last rows of (31) with the boundary conditions (3), i.e.,
Using the matrix to vector conversion, this system is changed to a new system by
equations with
unknowns
where
,
, and
are obtained using the matrix to vector conversion of
W,
F, and
respectively.
After solving the linear or nonlinear system (
32) using the generalized minimal residual method (GMRES) [
24] and Newton-Raphson method, respectively, the unknowns
W are found, and then the approximate solution can be obtained using (
18).
5. Test Problems
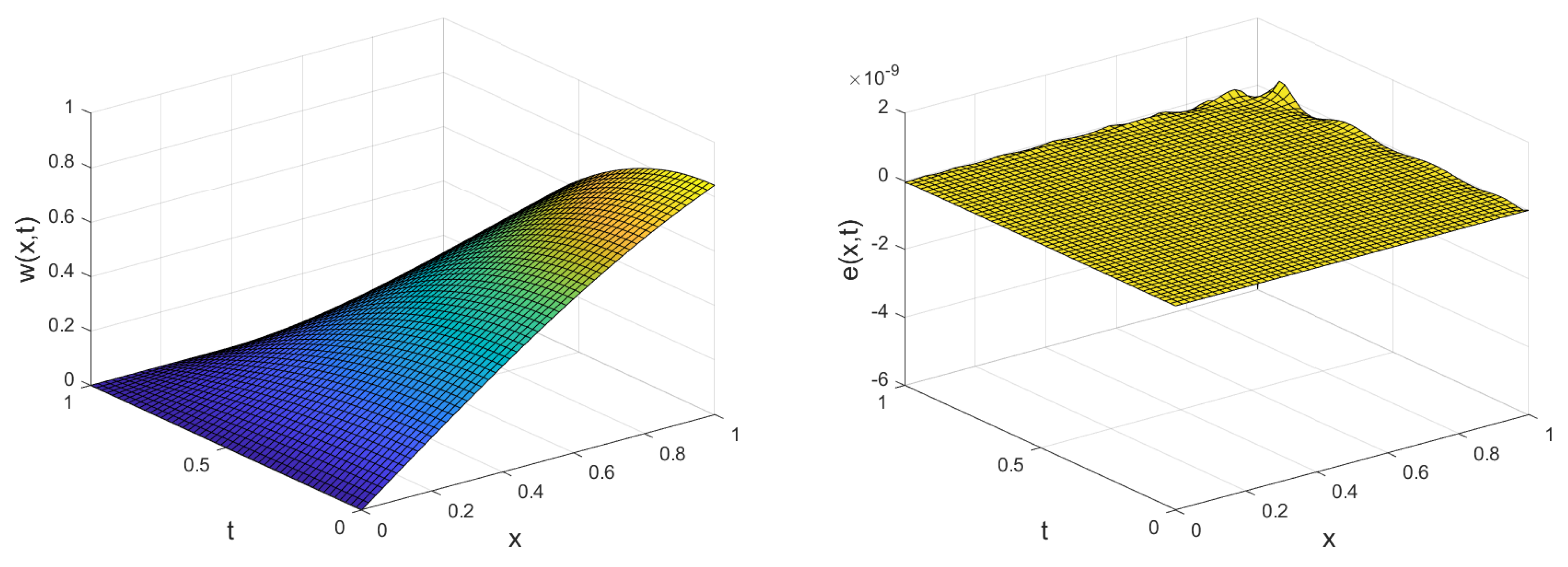
Example 1. Let us dedicate the first example to the case that the desired Equation (1) is of form with initial and boundary conditions and also . The exact solution for this example is given by [13] Table 1 shows a comparison between the proposed method and Legendre multiwavelets collocation method [
13]. As you can see, our proposed method gives better results than [
13]. According to
Table 1, we can see that with fewer bases, we have achieved much better accuracy than the method in [
13]. For different values of
M, the errors in
Table 2 are given with
,
norms applying pseudospectral method based on Chebyshev cardinal functions. In
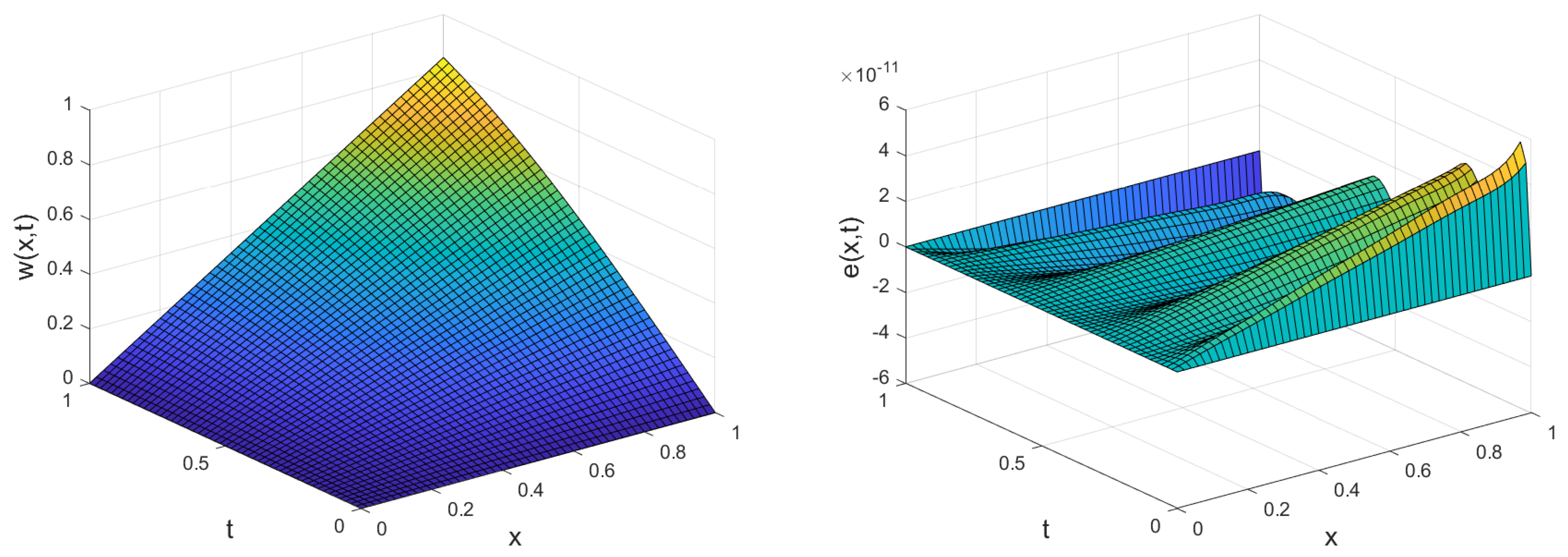
Figure 1, the approximate solution, and absolute value of error are depicted.
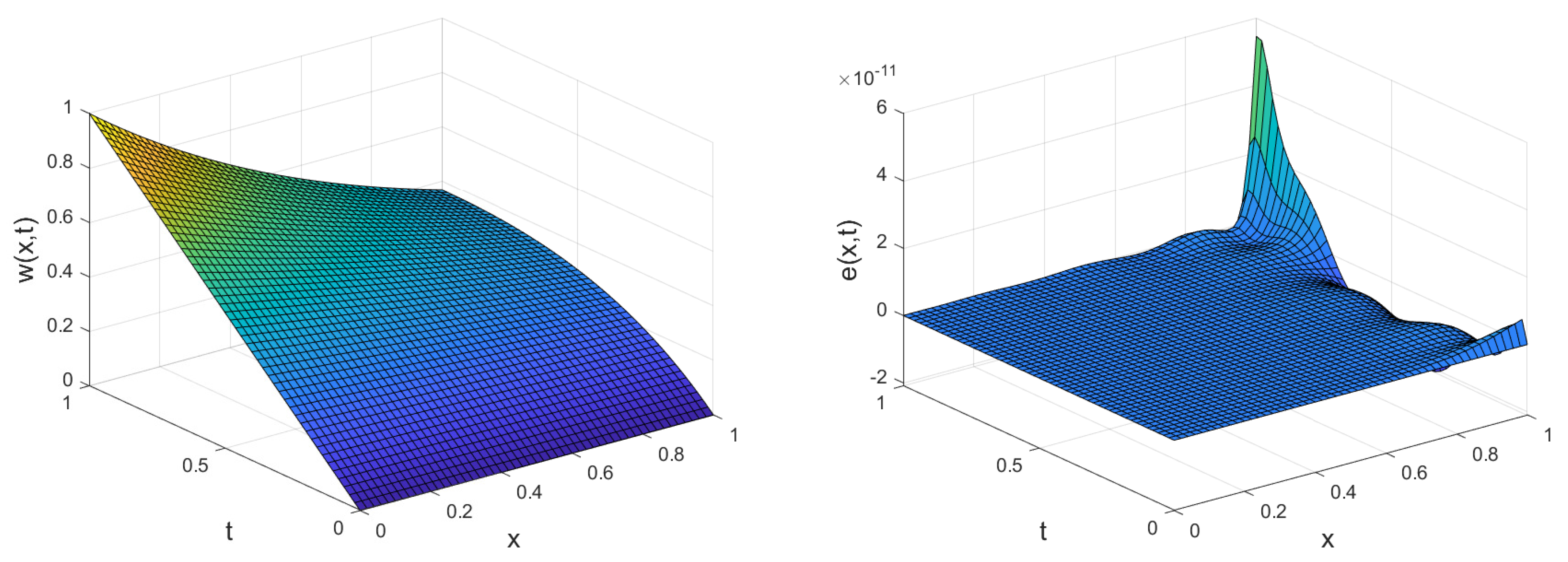
Example 2. Consider the following PIDEs [14] with initial and boundary conditions The exact solution for this example is .
In
Table 3, we report the
,
errors and CPU time for different values of
M. These results guarantee our convergence investigation in
Section 4. When
M increases, the error decreases, and approaches zero. The
,
errors obtained by presented method are compared with Hermite-Taylor matrix method [
26] and radial basis functions [
14] in
Table 4. According to
Table 4, we can see that our presented method is better than Hermite-Taylor matrix method [
26] and radial basis functions [
14]. Finally, we illustrate the approximate solution and absolute error in
Figure 2.
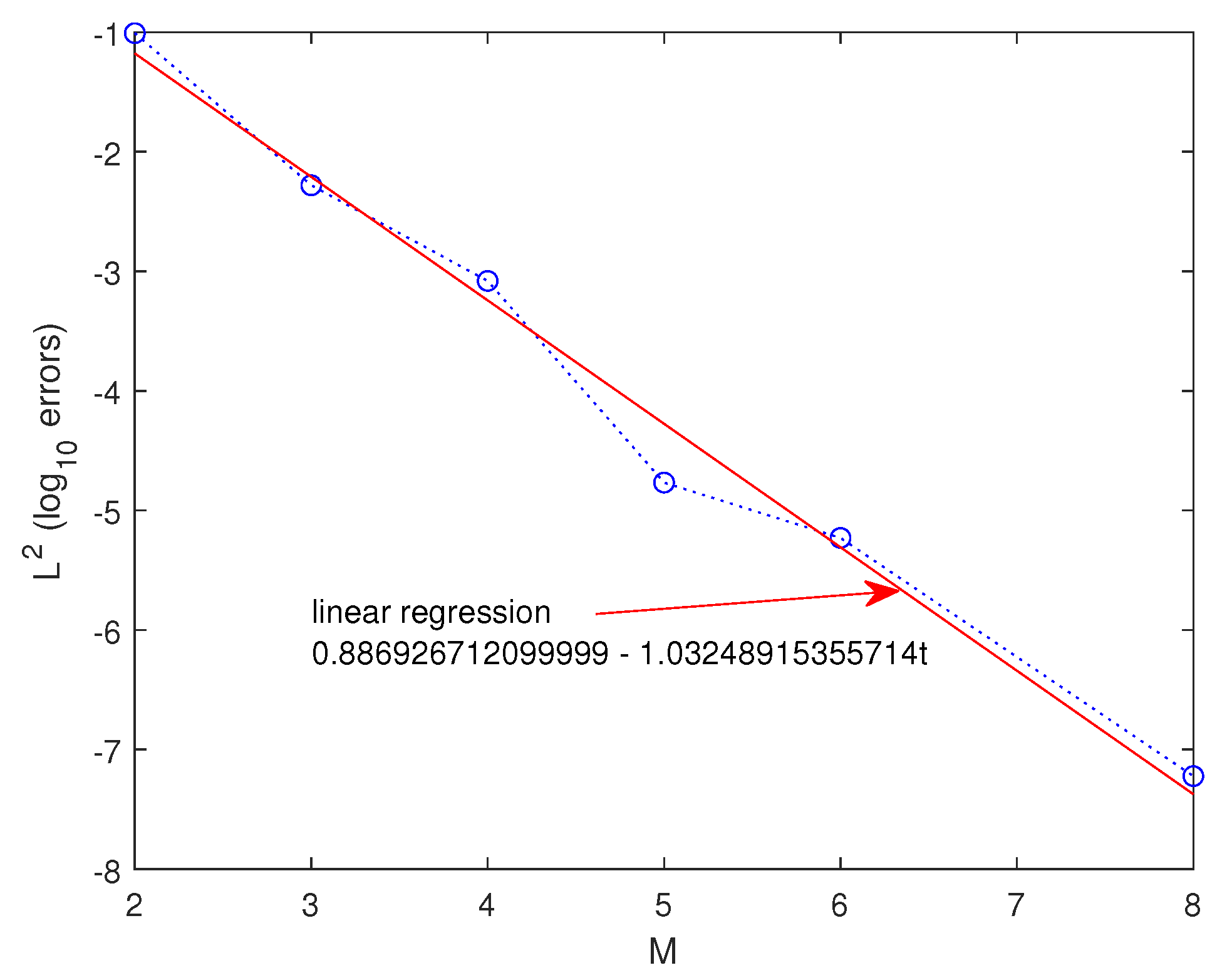
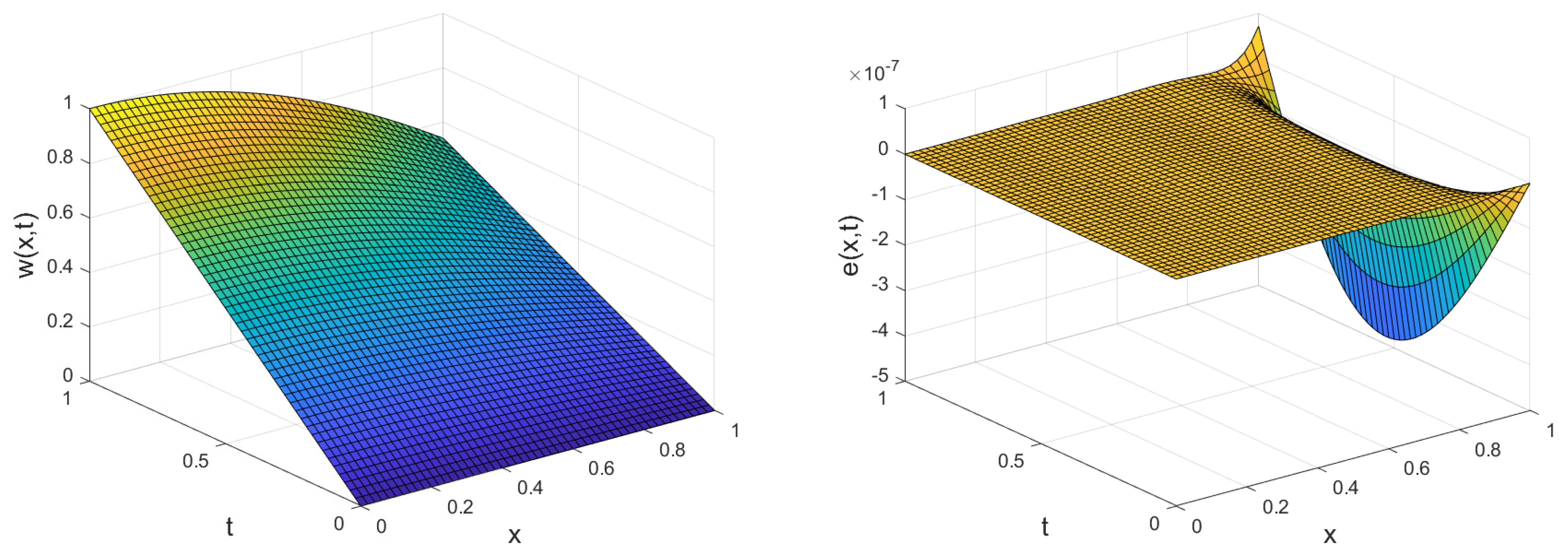
Example 3. To show the ability of the proposed method for solving nonlinear PIDEs (1), we consider the following equation.where with the boundary and initial conditions The exact solution for this Example is given by . Thus, we can easily judge the accuracy and convergency of the method.
Figure 3 illustrates the
, taking different values for
M. To show the order of convergence, we also plotted the linear regression. The slope of this line is equal to the order of convergence
. The numerical values with associated
error and
error are tabulated in
Table 5. Finally, we illustrate the approximate solution and absolute error, taking
in
Figure 4.
Example 4. The last example is dedicated to equationwhere Since the closed form of the exact solution to the problem is unavailable, we compute a reference solution by picking a large
. The
,
errors, CPU time and order of convergence are tabulated in
Table 6 for different values of
M.
Figure 5 illustrates the approximate solution and absolute error, taking
.
Table 7 shows the
,
errors at the different times, taking different
M.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}