
Fuzzy Automata as Coalgebras


{kind=link}
Abstract
1. Introduction
- The input stage transforms an input into a value. The method is to abstract the relation of an input and its corresponding vague value into a point in a coordinate system, where the horizontal axis stands for the input domain and the vertical axis stands for the vagueness domain.
- The processing stage involves inference rules and generates a result for each input, and then combines the results of the rule. In this stage, logical inference rules are used to describe the connection between cause and effect. The rules are of the formSuch rules provide information for the decision of control variables.
- The output stage processes the combined results from the processing stage and converts them to a specific control value. For instance, common techniques for conversion process includes max-min inference, max-membership principle and mean-max membership.
- Explore the fuzzy-set monad to serve as the basis to a coalgebraic approach;
- Provide a coalgebraic framework for different types of fuzzy automata, where the notions of fuzzy language and bisimulation can be addressed;
- Define appropriate combinators for composing fuzzy automata from two branches:state transition and output function.
2. Fuzzy Automata
- X is a set of states.
- I is a set of input symbols.
- O is a set of output symbols.
- is a fuzzy transition function.
- is a fuzzy output function.
- are defined as in FMrA.
- is a fuzzy input-output function.
- are defined as in FMrA.
- is a fuzzy input-transition-output function.
3. Fuzzy-Set Monad
3.1. Fuzzy Set
- 1
- is a lattice with the partial order ≤ which is defined by “ if and only if ”. The greatest (least) element is 1(0) that for all , ();
- 2
- is a commutative monoid with the unit element 1;
- 3
- For , if and only if .
3.2. Properties of Fuzzy-Set Monad
- satisfies that
- satisfies thatwhereand




4. Going Coalgebraic
4.1. Coalgebraic Models
- Definefor . Then, is a complete residuated lattice corresponding to the standard Lukasiewicz algebra.
- Definefor . Then, is a complete residuated lattice corresponding to the standard Gödel algebra.
- Definefor . Then, is a complete residuated lattice corresponding to the standard product algebra.
4.2. Fuzzy Language
4.3. Bisimulation

- For , if , there exists , such that and .
- For , if , there exists , such that and .
- For , if , there exists , such that and .
- For , if , there exists , such that and .
- If , there exists , such that and .
- If , there exists , such that and .
- If , then there exists such that , and
- If , then there exists such that , and
- 1.
- R is an approximate ϵ-bisimulation if and only if is an approximate ϵ-bisimulation.
- 2.
- If is an approximate -bisimulation for , then is an approximate -bisimulation.
- 3.
- If is an approximate -bisimulation, then is an approximate -bisimulation.
5. Composition for FMlA
6. Case Study

- (i)
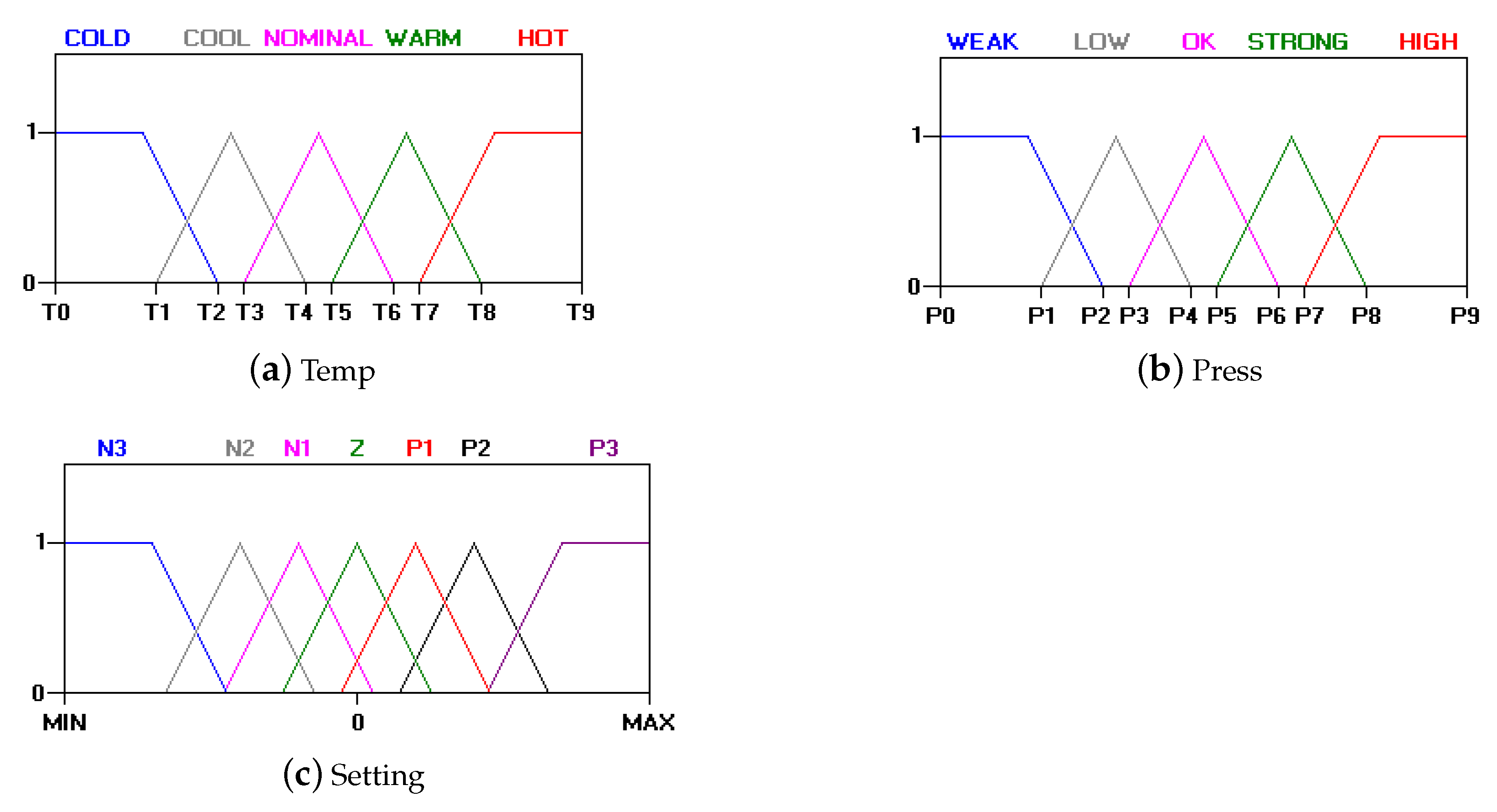
- The coalgebraic semantic of componentis actually an -coalgebra. In this model, states are the temperature over , inputs are operation modes over set I = {COLD,COOL,NORMAL,WARM,HOT} that are decided by users. The fuzzy transition function is constant on the temperature and given by withfor all . The output function is defined by where is an evaluation function. As a concrete example, suppose the fuzzy subset for the NORMAL mode is the functionThen the membership value (output) over state under the mode NORMAL is .
- (ii)
- is a component whose state space P is given by the pressure in the steam turbine and inputs are over the set , which represent the mode triggered by the users. The output of this component is the membership value corresponding to the current fuzzy state. The dynamics of this component iswith the transition and output functions defined as :for and
- (iii)
- The dynamics of and components are denoted by and whereIn this expression O is the output set determined by the output function, namely,is the singleton set. The notation ⌜f⌝ is the representation of function , which is defined as a coalgebra , where . The definition of is similar, given a pair of inputs of , it outputs the minimum value of the two.
- (iv)
- The last component works as follows. Through the channel it interacts with and . It receives the mode information and a membership value as the current state. The mode information determines which membership function is accessible for the component. Then the component outputs an area whose boundary consists of the horizontal axis and the graph of the membership function. Formally, this model is represented by a coalgebrawhere is an interval of real numbers. The output function is defined as . Resorting to centroid defuzzification technique, the output stage processes combine areas and produce a control value, which will participate in the control of the system.
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tanaka, K. An Introduction to Fuzzy Logic for Practical Applications; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Zadeh, L.A. Soft Computing and Fuzzy Logic. IEEE Softw. 1994, 11, 48–56. [Google Scholar] [CrossRef]
- Syropoulos, A.; Grammenos, T. Fuzzy Computation; A Modern Introduction to Fuzzy Mathematics; John Wiley & Sons: Hoboken, NJ, USA, 2020; pp. 191–214. [Google Scholar] [CrossRef]
- Wu, H.; Gu, X.; Zhen, L. Fuzzy Principal Component Analysis Model on Evaluating Innovation Service Capability. Sci. Program. 2020, 2020, 8834901. [Google Scholar] [CrossRef]
- Böhme, M.; Pham, V.; Roychoudhury, A. Coverage-Based Greybox Fuzzing as Markov Chain. IEEE Trans. Softw. Eng. 2019, 45, 489–506. [Google Scholar] [CrossRef]
- Simon, D.J. Introduction to Fuzzy Control. In Embedded Systems Programming; Electrical Engineering & Computer Science Faculty Publications: Cambridge, MA, USA, 2003; Volume 16, pp. 55–56. [Google Scholar]
- Doostfatemeh, M.; Kremer, S.C. New directions in fuzzy automata. Int. J. Approx. Reason. 2005, 38, 175–214. [Google Scholar] [CrossRef]
- Chaudhari, S.R.; Desai, A.S. On fuzzy Mealy and Moore machines. Bull. Pure Appl. Math 2010, 4, 375–384. [Google Scholar]
- Mordeson, J.N.; Nair, P.S. Fuzzy Mealy machines. Kybernetes 1966, 25, 18–33. [Google Scholar] [CrossRef]
- Li, Y.; Pedrycz, W. The equivalence between fuzzy Mealy and fuzzy Moore machines. Soft Comput. 2006, 10, 953–959. [Google Scholar] [CrossRef]
- Todinca, D.; Sora, I.; Butoianu, D.; Precup, R. A Novel Method to Compute the Membership Value of the States of Fuzzy Automata. In Proceedings of the 2018 IEEE 12th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 17–19 May 2018; pp. 107–112. [Google Scholar] [CrossRef]
- Pan, H.; Li, Y.; Cao, Y.; Li, P. Nondeterministic fuzzy automata with membership values in complete residuated lattices. Int. J. Approx. Reason. 2017, 82, 22–38. [Google Scholar] [CrossRef]
- Tiwari, S.P.; Pal, P. On a category of deterministic fuzzy automata. In 11th Conference of the European Society for Fuzzy Logic and Technology (EUSFLAT 2019); Atlantis Studies in Uncertainty Modelling; Atlantis Press: Paris, France, 2019; Volume 1. [Google Scholar] [CrossRef]
- Mockor, J. Monads and a common framework for fuzzy type automata. Int. J. Gen. Syst. 2019, 48, 406–442. [Google Scholar] [CrossRef]
- Singh, A.K.; Tiwari, S.P. Fuzzy Regular Languages Based on Residuated Lattice. New Math. Nat. Comput. 2020, 16, 363–376. [Google Scholar] [CrossRef]
- Yang, C.; Li, Y. Approximate bisimulations and state reduction of fuzzy automata under fuzzy similarity measures. Fuzzy Sets Syst. 2020, 391, 72–95. [Google Scholar] [CrossRef]
- Yang, C.; Li, Y. ϵ-Bisimulation Relations for Fuzzy Automata. IEEE Trans. Fuzzy Syst. 2018, 26, 2017–2029. [Google Scholar] [CrossRef]
- Yang, C.; Li, Y. Approximate bisimulation relations for fuzzy automata. Soft Comput. 2018, 22, 4535–4547. [Google Scholar] [CrossRef]
- Rutten, J.J.M.M. Automata and coinduction (an exercise in coalgebra). In International Conference on Concurrency Theory, Proceedings of the CONCUR 1998: CONCUR’98 Concurrency Theory, Nice, France, 8–11 September 1998; Springer: Berlin/Heidelberg, Germany, 1998; Volume 1466, pp. 194–218. [Google Scholar]
- Rutten, J.J.M.M. Universal coalgebra: A theory of systems. Theor. Comput. Sci. 2000, 249, 3–80. [Google Scholar] [CrossRef]
- Jacobs, B. Introduction to Coalgebra: Towards Mathematics of States and Observation; Cambridge Tracts in Theoretical Computer Science; Cambridge University Press: Cambridge, UK, 2016; Volume 59. [Google Scholar]
- Silva, A.; Bonchi, F.; Bonsangue, M.M.; Rutten, J.J.M.M. Generalizing determinization from automata to coalgebras. Log. Methods Comput. Sci. 2013, 9. [Google Scholar] [CrossRef]
- Sokolova, A. Coalgebraic Analysis of Probabilistic Systems. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 2005. [Google Scholar]
- Neves, R.; Barbosa, L.S. Hybrid Automata as Coalgebras. In International Colloquium on Theoretical Aspects of Computing, Proceedings of the ICTAC 2016: Theoretical Aspects of Computing, Taipei, Taiwan, 24–31 October 2016; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2016; Volume 9965, pp. 385–402. [Google Scholar] [CrossRef]
- Neves, R.; Barbosa, L.S. Languages and models for hybrid automata: A coalgebraic perspective. Theor. Comput. Sci. 2018, 744, 113–142. [Google Scholar] [CrossRef]
- Liu, A.; Sun, M. A Coalgebraic Semantics Framework for Quantum Systems. In International Conference on Formal Engineering Methods, Proceedings of the ICFEM 2019: Formal Methods and Software Engineering, Shenzhen, China, 5–9 November 2019; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11852, pp. 387–402. [Google Scholar] [CrossRef]
- Feng, Y.; Duan, R.; Ying, M. Bisimulation for Quantum Processes. ACM Trans. Program. Lang. Syst. 2012, 34, 1–43. [Google Scholar] [CrossRef]
- Larsen, K.G.; Skou, A. Bisimulation through probabilistic testing. Inf. Comput. 1991, 94, 1–28. [Google Scholar] [CrossRef]
- Haghverdi, E.; Tabuada, P.; Pappas, G.J. Bisimulation Relations for Dynamical and Control Systems. Electr. Notes Theor. Comput. Sci. 2002, 69, 120–136. [Google Scholar] [CrossRef]
- Jacobs, B. Invariants, Bisimulations and the Correctness of Coalgebraic Refinements. In International Conference on Algebraic Methodology and Software Technology, Proceedings of the AMAST 1997: Algebraic Methodology and Software Technology, Sydney, Australia, 13–17 December 1997; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1997; Volume 1349, pp. 276–291. [Google Scholar] [CrossRef]
- Venema, Y. Algebras and coalgebras. In Handbook of Modal Logic; Studies in Logic and Practical Reasoning; Elsevier B.V.: Amsterdam, The Netherlands, 2007; Volume 3, pp. 331–426. [Google Scholar] [CrossRef]
- Barbosa, L.S. Components as Coalgebras. Ph.D. Thesis, Universidade do Minho, Braga, Portugal, 2001. [Google Scholar]
- Guilherme, R.J.P. A Coalgebraic Approach to Fuzzy Automata. Ph.D. Thesis, Universidade Nova De Lisboa, Lisbon, Portugal, 2016. [Google Scholar]
- Wu, H.; Chen, Y. Coalgebras for Fuzzy Transition Systems. Electron. Notes Theor. Comput. Sci. 2014, 301, 91–101. [Google Scholar] [CrossRef]
- Wu, H.; Chen, Y.; Bu, T.; Deng, Y. Algorithmic and logical characterizations of bisimulations for non-deterministic fuzzy transition systems. Fuzzy Sets Syst. 2018, 333, 106–123. [Google Scholar] [CrossRef]
- Wu, H.; Chen, T.; Han, T.; Chen, Y. Bisimulations for fuzzy transition systems revisited. Int. J. Approx. Reason. 2018, 99, 1–11. [Google Scholar] [CrossRef]
- Nikravesh, M.; Kacprzyk, J.; Zadeh, L.A. Forging New Frontiers: Fuzzy Pioneers I; University of California: Berkeley, CA, USA, 2007. [Google Scholar]
- Meng, S.; Barbosa, L.S. Components as coalgebras: The refinement dimension. Theor. Comput. Sci. 2006, 351, 276–294. [Google Scholar] [CrossRef]
- Narasimha, M.; Cleaveland, R.; Iyer, S.P. The role of observations in probabilistic open systems. Electr. Notes Theor. Comput. Sci. 1999, 25, 133–144. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, A.; Wang, S.; Barbosa, L.S.; Sun, M. Fuzzy Automata as Coalgebras. Mathematics 2021, 9, 272. https://doi.org/10.3390/math9030272
Liu A, Wang S, Barbosa LS, Sun M. Fuzzy Automata as Coalgebras. Mathematics. 2021; 9(3):272. https://doi.org/10.3390/math9030272
Chicago/Turabian StyleLiu, Ai, Shun Wang, Luis Soares Barbosa, and Meng Sun. 2021. "Fuzzy Automata as Coalgebras" Mathematics 9, no. 3: 272. https://doi.org/10.3390/math9030272
APA StyleLiu, A., Wang, S., Barbosa, L. S., & Sun, M. (2021). Fuzzy Automata as Coalgebras. Mathematics, 9(3), 272. https://doi.org/10.3390/math9030272