1. Introduction
A broad and eminent area in Computer Aided Geometric Design (CAGD) deals with curves, surfaces, and their computational aspects. Subdivision is the most remarkable field for the purpose of modeling of curves and surfaces in CAGD. Subdivision methods have achieved much popularity in the past few years because of their implementation along with their mathematical formulation. The convolution technique [
1] is one of the techniques used to merge different schemes. It has an important role in error analysis of the schemes. Actually, subdivision schemes take the polygons as input and successively produced smooth polygons or shapes as an output. Initially, the schemes with two rules were introduced. Later on, the interest was developed to recommend the schemes with three rules. This means at each subdivision level, every edge of the polygon is divided into three sub-edges. In the literature, these schemes are known as ternary schemes. Here, first we present brief review of these schemes then we will address the problem of error analysis.
Here we present an overview of the ternary subdivision schemes. Mustafa et al. [
2,
3,
4,
5] presented a
-point ternary approximating and interpolating scheme, a 6-point ternary interpolating scheme, a family of even points ternary schemes, the odd point ternary approximating scheme respectively. Hassan et al. [
6] and Siddiqi and Rehan [
7] threw the light on 4-point ternary interpolating subdivision schemes. Kwan et al. [
8] explored the phenomenon of 4-points ternary approximating scheme and Mustafa et al. [
9,
10] examined 5-point and 6-point ternary interpolating schemes and their differentiability. Siddiqi et al. [
11,
12] explained 4-point ternary interpolating scheme for curve sketching and constructed different ternary approximating subdivision schemes. Peng et al. [
13,
14] discovered non-linear circle preserving interpolating scheme and fractal behavior of ternary rational interpolating scheme. Further discussing on ternary subdivision scheme, Aslam [
15] and Beccari et al. [
16] showed their talent to highlight a family of 5-point non-linear ternary interpolating scheme and an interpolating 4-point ternary non-stationary scheme with tension control respectively. Certainly, there are a few methods for estimating the error bounds of these schemes.
Some of the authors [
17,
18,
19] computed the error and order of the convergence of some binary schemes. Mustafa et al. [
20,
21,
22,
23] computed error bounds for binary, ternary, tensor product binary volumetric model and binary non-stationary schemes. Error bounds for a class of subdivision schemes based on the two-scale refinement equation were computed by Moncayo and Amat [
24]. A formula for estimating the deviation of a binary interpolating subdivision curve from its data polygon was presented by Deng et al. [
25]. However, the generalization of this formula to deal with the cases of
n-ary interpolating and approximating schemes is still an open question. The following open question also arises in our mind: “How many subdivision steps (depths) are required to satisfy a user specified error (distance) tolerance?” Some of the researchers can be nominated as the embarking volunteers for the explanation of above questions such as: Mustafa and Hashmi [
26] estimated subdivision depth computation for
n-ary schemes by using first forward difference technique. Mustafa [
27] presented subdivision depth computation technique for tensor product ternary volumetric model. Mustafa et al. also computed subdivision depth for triangular surfaces [
28]. The above methods do not work for all type of subdivision schemes. Counter examples are also presented in this paper.
A novel numerical algorithm to estimate the subdivision depth was offered only for binary subdivision schemes in [
29]. Still there is a gap/space to work for the subdivision depth of higher arity (i.e., ternary, quaternarys and so on) schemes. In this paper, an optimal approach is proposed to estimate subdivision depths for ternary (i.e., for each subdivision level, every edge of polygon is divided into three sub-edges) subdivision schemes.
The remaining part of the paper is arranged as follows. In
Section 2, basic results, subdivision depths and numerical experiments of the method for univariate cases of the schemes are presented while in
Section 3, these results for bivariate cases of the schemes are offered. Conclusions are drawn in
Section 4.
2. Preliminary Results for Univariate Case
Let
be a sequence of 2D points in
which are obtained by the following refinement procedure
with
where
indicates the refinement level. The points at 0th level
are known as initial control points. The refinement procedure described in (1) along with its necessary condition of converge (2) is known as univariate ternary subdivision scheme. The following formulation of unknown coefficients
is given by [
21].
with
The following symbolization will also be used in coming section of this paper.
Now we follow the techniques and notations presented in [
24]. To be precise, let the vector
represent the approximation coefficients associated with a certain
level of resolution. If
represents the
resolution level then the reconstruction algorithm used to define the approximation coefficients at stage
in terms of the coefficient at stage
k are obtained by the use of subdivision algorithms in terms of convolutions i.e.,
where ★ denotes the convolution product of two vectors
and
.
Generally, the convolution product of two vectors
and
of finite lengths
and
respectively for ternary subdivision scheme is defined as
In the following subsection, we present the generalized version of the results presented in the Appendices A1 and A2 of [
24].
2.1. Reformulation of Successive Convolutions
In this subsection, we obtain some generalized inequalities used in order to find the subdivision depth of ternary subdivision schemes for the generation of curves. Their further generalizations are presented in
Section 3 for the computation of depth of ternary subdivision schemes for tensor product surfaces. This section contains typical rigorous and tedious mathematical expressions. Readers are refers to Example 1 of this section for better understanding.
Lemma 1. Let be the vector of finite length and with for , then the following one dimensional convolutions is bounded bywhere is defined recursively byand Proof. To prove this result, we start with the case of and convolutions and then a general case will be derived.
Case : From (5), we obtain a relation given in the following
where
denotes the integer part. Using infinity norm
, we get
Case : From (6), we acquire
General case: By using the same technique, we acquire the reformulations for
-th convolutions, which is in the following
Lemma 2. The term in the inequality (9) has the following expression Proof. Now we start for an induction process, which is over . Then
Now replace
n by
in (13), we obtain
Now using (12), we acquire
so
We suppose that it is true for an integer
, that is
Case : Consider
Now, replace
n by
in (15), we have
Using (12) and (14), we acquire
Now, applying Lemmas 1 and 2, we arrive at the following useful result:
Corollary 1. The associated constant of a -th convolution with vector is Proof. Assume that
with
and
Then for
and by using Lemma 1, we acquire
Similarly for
and using Lemma 2, we have
Finally, using (17) and (18), we get (16). □
2.2. Subdivision Depth for Ternary Subdivision Curves
In this section, we first generalize the inequalities (2.18) and then (2.5) which were presented in [
21]. After that, we present a numerical inequality to compute the subdivision depth of ternary subdivision schemes for curve modeling.
Theorem 1. Consider the initial polygon and , recursively interpreted by (1) together with (2). Suppose represents the polygon at the points . Then after two successive refinements/iterations k and , the error bounds between these two iterations iswhere defined in (16), and Theorem 2. Let a limit curve be linked with the subdivision iterative process, then under the same conditions used in Theorem 1 the following inequality holdwhere is a natural number, such that . Theorem 3. Let k be subdivision depth and let be the error bound between ternary subdivision curve and its k-level control polygon . For arbitrary , ifthen . Proof. Let
be the distance between limit curve
and control polygon
at
k-th level defined in Theorem 2, such that
To obtain given error tolerance
, consider
which implies
Now taking logarithm, we have
which implies
then
. This completes the proof. □
2.3. Application for Univariate Case
Here, we present a few numerical experiments to compute subdivision depths of ternary subdivision schemes for curves. The associated constants
defined in (16) of some ternary subdivision curves are shown in
Table 1.
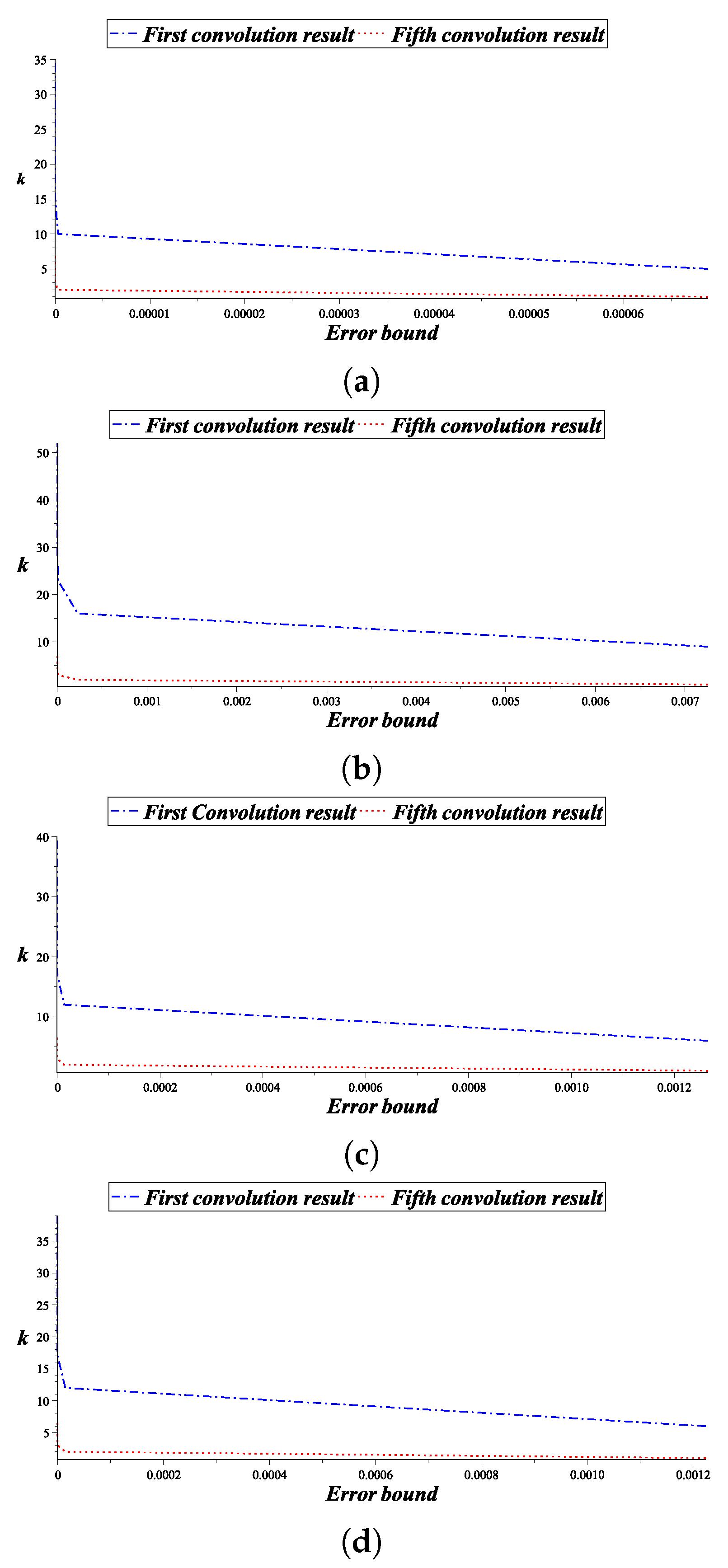
Remark 1. In this technique for is equal to δ defined in [21]. Please note that in [21], if then error bounds cannot be computed. However, in the proposed technique, if we increase the value of until becomes less than one, so using this argument we can compute error bounds in each situation even though the value of δ becomes greater or equal to one. Example 1. Given initial polygon with values be interpreted recursively by the 2-point ternary approximating subdivision scheme [12] (i.e., , , , , , ). For this ternary two point scheme (), we have from (16) Using (3) and Lemma 1, we have with for . Hence This further implieswhere Since , for all , so Similarly, we can compute the values of . For convenience, we have computed the values up to , which are shown in Table 1. Its subdivision depth k (level of iterations) is computed by using Theorem 3 at different values of which are given in Table 2. From this table, we observed that as
increases subdivision depth decreases. This shows that the less subdivision depth can be obtained by using proposed technique. In other words, we need fewer iteration to get optimal subdivision depth as compared to the technique given in [
21] (which is denoted by
). For example, by [
21], it needs thirty five iterations to obtain error tolerance
but using our technique, it needs only seven iterations corresponding to
. The comparison of first and fifth convolution results is shown in
Figure 1a.
Example 2. Consider the 3-point interpolating subdivision scheme [30] with Its subdivision depths k for (see, Table 1) are computed by using Theorem 3, which are shown in Table 3 and in graphical sense shown in Figure 1b. Example 3. Given initial control polygon with values be illustrated recursively by the ternary 4-point approximating scheme [8]. Its subdivision depth k for are given in Table 4. It is also demonstrated with the help of Figure 1c. Example 4. Given be the initial polygon and for all positive integers we have the values be specified recursively by ternary 4-point interpolating subdivision scheme [6] with parameter . Its subdivision depths for (see, Table 1) are given in Table 5 and its performance is shown in Figure 1d. 3. Preliminary Results for Bivariate Case
In this section, we generalize our representation of the 2-dimensional case to the 3-dimensional case. That is, we first focus our attention on generalizing the inequalities presented in
Section 2.1 then we generalize the inequalities of
Section 2.2 to compute subdivision depth of tensor product surfaces. For this, let
be the sequence of 3D points
,
which are produced by the following tensor product of ternary scheme (1)
where
satisfies (2).
Now we assign the coefficients
and
, by using the same procedure of symbolization given in [
21] i.e.,
To achieve the goal, all that is needed is to make the set up given before
Section 2.1 for the 3D case. Here we skip the unnecessary detail and directly go to the following results.
Lemma 3. Let be the vector of finite length for bivariate case and , with for , then the following two dimensional convolutions are bounded bywhereand Proof. To prove the result, we start with the case of and convolutions and later on we analyze the general case.
Case : Consider an arbitrary sequence of vectors
. Then we have
where we are taking
and
for arbitrary sequence
f and
g. Thus,
Consider
and
then from (21), we obtain
Case : Now, after applying two time convolution, we obtain
Consider
and
then we obtain from (22)
By the same strategy, we get the following reformulations for
-th convolution
Now consider
and
then, from (23), we obtain
where
□
3.1. Subdivision Depth for Ternary Subdivision Surfaces
In this section, we first compute error bounds for subdivision surfaces. Secondly, we use these error bounds to compute subdivision depths by using the methodology given in [
21].
Theorem 4. Consider the initial control polygon and the values , recursively defined by (20) together with (2). Also be the representation of polygon at the points . Then after two consecutive iterations k and the error bounds is given as followswhere defined in (24) and (25), where λ, τ and μ are defined in [21]. Theorem 5. Let a limit surface be linked with the subdivision iterative process, then under the same conditions used in Theorem 4 the following inequality holdwhere is a natural number, such that . Remark 2. Here is also equal to δ which is defined in [21]. Theorem 6. Let k be subdivision depth and let be the error bound between ternary subdivision surface and its k-level control polygon . For arbitrary , ifthen . Proof. Let
be the distance between limit surface
and control polygon
at
k-th level defined in Theorem 5, such that
To obtain given tolerance
, consider
which implies
Now taking logarithm, we have
which implies
which further implies
then
. This completes the proof. □
3.2. Application for Bivariate Case
Here, we present some numerical examples to compute subdivision depth for subdivision surfaces. The associated constants
for some ternary subdivision surfaces by using (24) and (25) are shown in
Table 6. We see that the values of
decrease with the increase of
. This is the main advantage of our proposed approach.
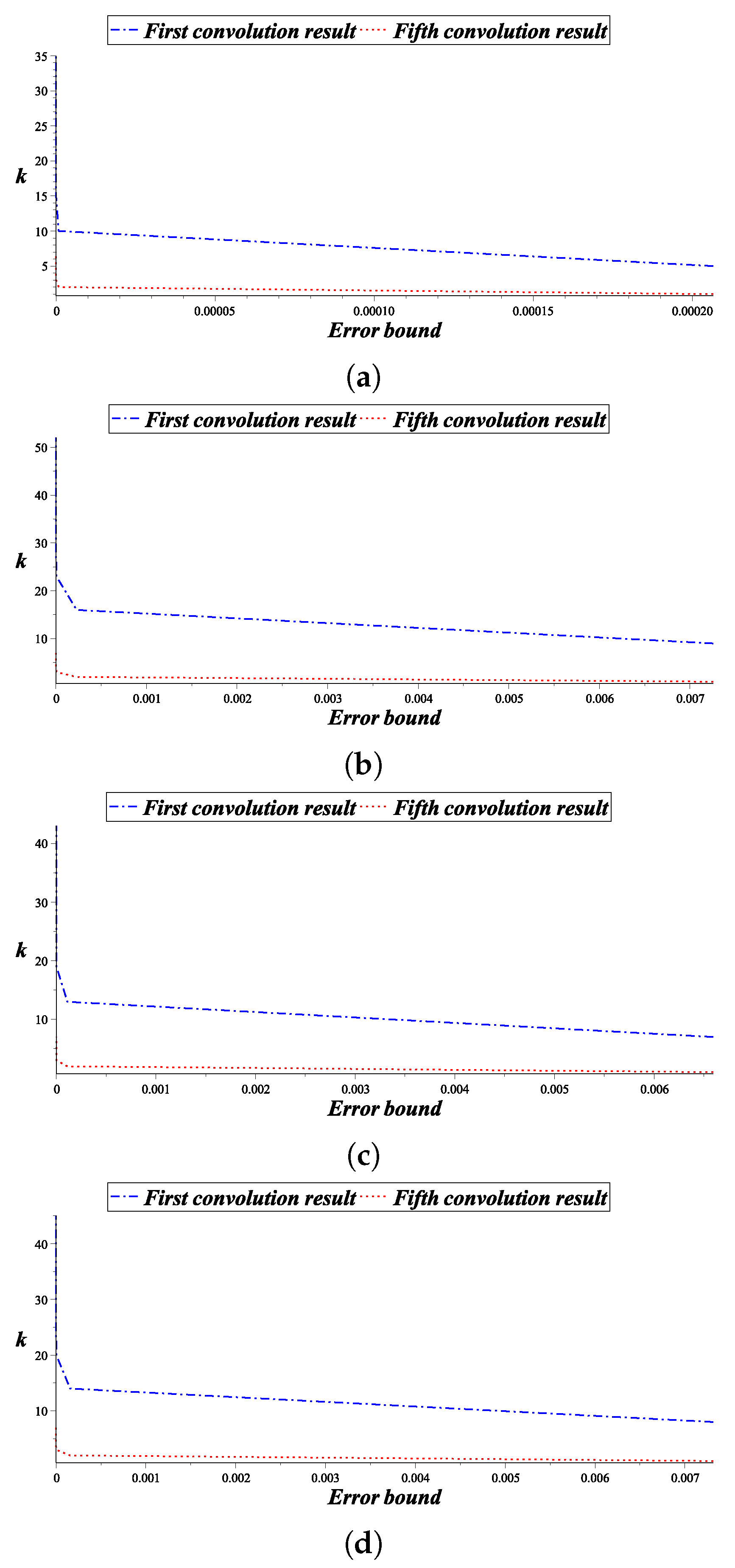
Example 5. Given the initial polygon with values be frequent explanation in [12], then the subdivision depths for by using Theorem 6 are shown in Table 7. The first and fifth convolution comparison results are shown in Figure 2a. Example 6. Given control polygon with the values for all positive integers be illustrated by the tensor product of the scheme demonstrated in [30], then the subdivision depths for by using Theorem 6 are shown in Table 8 and in the sense of graphical structure these results are shown in Figure 2b. Example 7. Given an initial control polygon with the values be frequent explanation by the tensor product of the scheme presented in [8], then the subdivision depths for by using Theorem 6 are shown in Table 9 and graphical results are presented in Figure 2c. Example 8. Given be the initial polygon with values be illustrated by the tensor product of the scheme presented in [6] with , then the subdivision depths for are shown in Table 10. Also demonstration of graphical view are given in Figure 2d. 
 ,
, 



{kind=link}
{kind=link}