Relaxed Inertial Tseng’s Type Method for Solving the Inclusion Problem with Application to Image Restoration



Abstract
1. Introduction
2. Preliminaries
- (1)
- Monotone if:
- (2)
- Firmly nonexpansive if:or equivalently,
- (3)
- L-Lipschitz continuous on if there exists a constant such that:If then A is called nonexpansive.
- (i)
- , where ;
- (ii)
- there exists with .
- (a)
- for every exists;
- (b)
- every sequentially weak cluster point of is in E.
3. Relaxed Inertial Tseng-Type Algorithm for the Variational Inclusion Problem
| Algorithm 1 Relaxed inertial Tseng-type algorithm for the VI problem. |
Initialization: Choose and Iterative steps: Given the current iterates and . Step 1. Set as:
Step 2. Compute:
If , stop. is the solution of (1). Else, go to Step 3. Step 3. Compute:
where the stepsize sequence is updated as follows:
Set , and go back to Step 1. |
4. Application to the Split Feasibility Problem
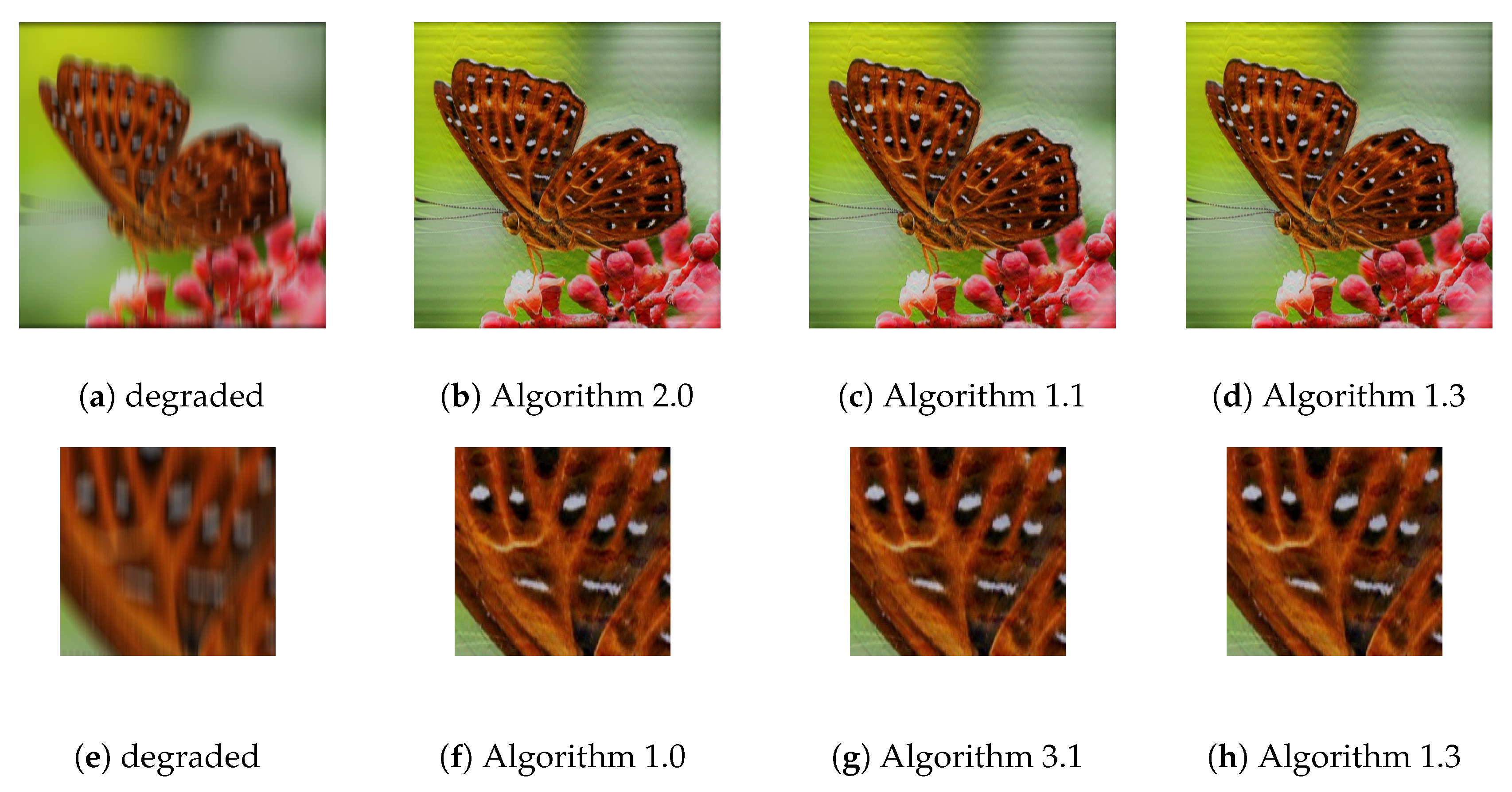
Application to the Image Restoration Problem
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Combettes, P.L.; Wajs, V.R. Signal recovery by proximal forward-backward splitting. Multiscale Model. Simul. 2005, 4, 1168–1200. [Google Scholar] [CrossRef]
- Byrne, C. A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2003, 20, 103. [Google Scholar] [CrossRef]
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441. [Google Scholar] [CrossRef]
- Hanjing, A.; Suantai, S. A Fast Image Restoration Algorithm Based on a Fixed Point and Optimization Method. Mathematics 2020, 8, 378. [Google Scholar] [CrossRef]
- Thong, D.V.; Cholamjiak, P. Strong convergence of a forward–backward splitting method with a new step size for solving monotone inclusions. Comput. Appl. Math. 2019, 38, 94. [Google Scholar] [CrossRef]
- Marcotte, P. Application of Khobotov’s algorithm to variational inequalities and network equilibrium problems. INFOR Inf. Syst. Oper. Res. 1991, 29, 258–270. [Google Scholar] [CrossRef]
- Gibali, A.; Thong, D.V. Tseng type methods for solving inclusion problems and its applications. Calcolo 2018, 55, 49. [Google Scholar] [CrossRef]
- Khobotov, E.N. Modification of the extra-gradient method for solving variational inequalities and certain optimization problems. USSR Comput. Math. Math. Phys. 1987, 27, 120–127. [Google Scholar] [CrossRef]
- Kinderlehrer, D.; Stampacchia, G. An Introduction to Variational Inequalities and Their Applications; Academic Press: New York, NY, USA, 1980; Volume 31. [Google Scholar]
- Trémolières, R.; Lions, J.L.; Glowinski, R. Numerical Analysis of Variational Inequalities; North Holland: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Baiocchi, C. Variational and quasivariational inequalities. In Applications to Free-boundary Problems; Springer: Basel, Switzerland, 1984. [Google Scholar]
- Konnov, I. Combined Relaxation Methods for Variational Inequalities; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001; Volume 495. [Google Scholar]
- Jaiboon, C.; Kumam, P. An extragradient approximation method for system of equilibrium problems and variational inequality problems. Thai J. Math. 2012, 7, 77–104. [Google Scholar]
- Kumam, W.; Piri, H.; Kumam, P. Solutions of system of equilibrium and variational inequality problems on fixed points of infinite family of nonexpansive mappings. Appl. Math. Comput. 2014, 248, 441–455. [Google Scholar] [CrossRef]
- Chamnarnpan, T.; Phiangsungnoen, S.; Kumam, P. A new hybrid extragradient algorithm for solving the equilibrium and variational inequality problems. Afrika Matematika 2015, 26, 87–98. [Google Scholar] [CrossRef]
- Deepho, J.; Kumam, W.; Kumam, P. A new hybrid projection algorithm for solving the split generalized equilibrium problems and the system of variational inequality problems. J. Math. Model. Algorithms Oper. Res. 2014, 13, 405–423. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P. Weak convergence of explicit extragradient algorithms for solving equilibirum problems. J. Inequal. Appl. 2019, 2019, 1–25. [Google Scholar] [CrossRef]
- Lions, P.L.; Mercier, B. Splitting algorithms for the sum of two nonlinear operators. SIAM J. Numer. Anal. 1979, 16, 964–979. [Google Scholar] [CrossRef]
- Passty, G.B. Ergodic convergence to a zero of the sum of monotone operators in Hilbert space. J. Math. Anal. Appl. 1979, 72, 383–390. [Google Scholar] [CrossRef]
- Tseng, P. A modified forward-backward splitting method for maximal monotone mappings. SIAM J. Control Optim. 2000, 38, 431–446. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Monotone operators and the proximal point algorithm. SIAM J. Control Optim. 1976, 14, 877–898. [Google Scholar] [CrossRef]
- Kitkuan, D.; Kumam, P.; Martínez-Moreno, J. Generalized Halpern-type forward–backward splitting methods for convex minimization problems with application to image restoration problems. Optimization 2019, 1–25. [Google Scholar] [CrossRef]
- Kitkuan, D.; Kumam, P.; Martínez-Moreno, J.; Sitthithakerngkiet, K. Inertial viscosity forward–backward splitting algorithm for monotone inclusions and its application to image restoration problems. Int. J. Comput. Math. 2020, 97, 482–497. [Google Scholar] [CrossRef]
- Huang, Y.; Dong, Y. New properties of forward–backward splitting and a practical proximal-descent algorithm. Appl. Math. Comput. 2014, 237, 60–68. [Google Scholar] [CrossRef]
- Goldstein, A.A. Convex programming in Hilbert space. Bull. Am. Math. Soc. 1964, 70, 709–710. [Google Scholar] [CrossRef]
- Padcharoen, A.; Kitkuan, D.; Kumam, W.; Kumam, P. Tseng methods with inertial for solving inclusion problems and application to image deblurring and image recovery problems. Comput. Math. Method 2020, e1088. [Google Scholar] [CrossRef]
- Attouch, H.; Peypouquet, J.; Redont, P. Backward–forward algorithms for structured monotone inclusions in Hilbert spaces. J. Math. Anal. Appl. 2018, 457, 1095–1117. [Google Scholar] [CrossRef]
- Dadashi, V.; Postolache, M. Forward–backward splitting algorithm for fixed point problems and zeros of the sum of monotone operators. Arab. J. Math. 2020, 9, 89–99. [Google Scholar] [CrossRef]
- Suparatulatorn, R.; Khemphet, A. Tseng type methods for inclusion and fixed point problems with applications. Mathematics 2019, 7, 1175. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: New York, NY, USA, 2011; Volume 408. [Google Scholar]
- Eckstein, J.; Bertsekas, D.P. On the Douglas—Rachford splitting method and the proximal point algorithm for maximal monotone operators. Math. Program. 1992, 55, 293–318. [Google Scholar] [CrossRef]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput.Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Nesterov, Y. A method for unconstrained convex minimization problem with the rate of convergence O (1/k2). Doklady Ussr 1983, 269, 543–547. [Google Scholar]
- Alvarez, F. On the minimizing property of a second order dissipative system in Hilbert spaces. SIAM J. Control Optim. 2000, 38, 1102–1119. [Google Scholar] [CrossRef]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Dong, Q.; Cho, Y.; Zhong, L.; Rassias, T.M. Inertial projection and contraction algorithms for variational inequalities. J. Glob. Optim. 2018, 70, 687–704. [Google Scholar] [CrossRef]
- Abubakar, J.; Sombut, K.; Ibrahim, A.H. An Accelerated Subgradient Extragradient Algorithm for Strongly Pseudomonotone Variational Inequality Problems. Thai J. Math. 2019, 18, 166–187. [Google Scholar]
- Van Hieu, D. An inertial-like proximal algorithm for equilibrium problems. Math. Methods Oper. Res. 2018, 1–17. [Google Scholar] [CrossRef]
- Thong, D.V.; Van Hieu, D. Inertial extragradient algorithms for strongly pseudomonotone variational inequalities. J. Comput. Appl. Math. 2018, 341, 80–98. [Google Scholar] [CrossRef]
- Abubakar, J.; Kumam, P.; Rehman, H.; Ibrahim, A.H. Inertial Iterative Schemes with Variable Step Sizes for Variational Inequality Problem Involving Pseudomonotone Operator. Mathematics 2020, 8, 609. [Google Scholar] [CrossRef]
- Attouch, H.; Cabot, A. Convergence of a relaxed inertial proximal algorithm for maximally monotone operators. Math. Program. 2019. [Google Scholar] [CrossRef]
- Attouch, H.; Cabot, A. Convergence rate of a relaxed inertial proximal algorithm for convex minimization. Optimization 2019. [Google Scholar] [CrossRef]
- Attouch, H.; Cabot, A. Convergence of a Relaxed Inertial Forward–Backward Algorithm for Structured Monotone Inclusions. Appl. Math. Optim. 2019, 80, 547–598. [Google Scholar] [CrossRef]
- Boţ, R.I.; Csetnek, E.R.; Hendrich, C. Inertial Douglas–Rachford splitting for monotone inclusion problems. Appl. Math. Comput. 2015, 256, 472–487. [Google Scholar] [CrossRef]
- Iutzeler, F.; Hendrickx, J.M. A generic online acceleration scheme for optimization algorithms via relaxation and inertia. Optim. Methods Softw. 2019, 34, 383–405. [Google Scholar] [CrossRef]
- Alves, M.M.; Marcavillaca, R.T. On inexact relative-error hybrid proximal extragradient, forward-backward and Tseng’s modified forward-backward methods with inertial effects. Set-Valued Variat. Anal. 2019, 1–25. [Google Scholar] [CrossRef]
- Alves, M.M.; Eckstein, J.; Geremia, M.; Melo, J.G. Relative-error inertial-relaxed inexact versions of Douglas-Rachford and ADMM splitting algorithms. Comput. Optim. Appl. 2020, 75, 389–422. [Google Scholar] [CrossRef]
- Xia, Y.; Wang, J. A general methodology for designing globally convergent optimization neural networks. IEEE Trans. Neural Netw. 1998, 9, 1331–1343. [Google Scholar] [PubMed]
- Lorenz, D.A.; Pock, T. An inertial forward-backward algorithm for monotone inclusions. J. Math. Imaging Vis. 2015, 51, 311–325. [Google Scholar] [CrossRef]
- Takahashi, W. Nonlinear Functional Analysis-Fixed Point Theory and its Applications; Springer: New York, NY, USA, 2000. [Google Scholar]
- Brezis, H. Ope Rateurs Maximaux Monotones Et Semi-Groupes De Contractions Dans Les Espaces De Hilbert; Elsevier: North Holland, The Netherlands, 1973. [Google Scholar]
- Ofoedu, E. Strong convergence theorem for uniformly L-Lipschitzian asymptotically pseudocontractive mapping in real Banach space. J. Math. Anal. Appl. 2006, 321, 722–728. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–597. [Google Scholar] [CrossRef]
- Censor, Y.; Elfving, T. A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Censor, Y.; Elfving, T.; Kopf, N.; Bortfeld, T. The multiple-sets split feasibility problem and its applications for inverse problems. Inverse Probl. 2005, 21, 2071. [Google Scholar] [CrossRef]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A. A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51, 2353. [Google Scholar] [CrossRef]
- Moudafi, A.; Oliny, M. Convergence of a splitting inertial proximal method for monotone operators. J. Comput. Appl. Math. 2003, 155, 447–454. [Google Scholar] [CrossRef]
- Iiduka, H.; Takahashi, W. Strong convergence theorems for nonexpansive nonself-mappings and inverse-strongly-monotone mappings. J. Convex Anal. 2004, 11, 69–79. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm 1 | Moudafi and Oliney | Lorenz and Pock | ||||
|---|---|---|---|---|---|---|
| Images | ISNR | SSIM | ISNR | SSIM | ISNR | SSIM |
| Butterfly | 7.774553 | 0.9692 | 7.546909 | 0.9686 | 7.587748 | 0.9688 |
| Lena | 7.110084 | 0.9819 | 7.126583 | 0.9813 | 7.147807 | 0.9814 |
| Pepper | 8.489581 | 0.9789 | 8.373034 | 0.9780 | 8.354713 | 0.9779 |
| Equation (43) | Byrne | |||
|---|---|---|---|---|
| Images | ISNR | SSIM | ISNR | SSIM |
| Butterfly | 7.7741909 | 0.9999 | 5.078051 | 0.9998 |
| Lena | 7.112128 | 0.9999 | 5.396904 | 0.9996 |
| Pepper | 8.488140 | 0.9999 | 6.127068 | 0.9997 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abubakar, J.; Kumam, P.; Hassan Ibrahim, A.; Padcharoen, A. Relaxed Inertial Tseng’s Type Method for Solving the Inclusion Problem with Application to Image Restoration. Mathematics 2020, 8, 818. https://doi.org/10.3390/math8050818
Abubakar J, Kumam P, Hassan Ibrahim A, Padcharoen A. Relaxed Inertial Tseng’s Type Method for Solving the Inclusion Problem with Application to Image Restoration. Mathematics. 2020; 8(5):818. https://doi.org/10.3390/math8050818
Chicago/Turabian StyleAbubakar, Jamilu, Poom Kumam, Abdulkarim Hassan Ibrahim, and Anantachai Padcharoen. 2020. "Relaxed Inertial Tseng’s Type Method for Solving the Inclusion Problem with Application to Image Restoration" Mathematics 8, no. 5: 818. https://doi.org/10.3390/math8050818
APA StyleAbubakar, J., Kumam, P., Hassan Ibrahim, A., & Padcharoen, A. (2020). Relaxed Inertial Tseng’s Type Method for Solving the Inclusion Problem with Application to Image Restoration. Mathematics, 8(5), 818. https://doi.org/10.3390/math8050818