A Generalized Viscosity Inertial Projection and Contraction Method for Pseudomonotone Variational Inequality and Fixed Point Problems


Abstract
1. Introduction
- -strongly monotone on if there exists such that
- monotone on if
- - strongly pseudo-monotone on if there exists such thatfor all ;
- pseudo-monotone on if for all
- L- Lipschitz continuous on if there exists a constant such thatwhen then A is called a contraction;
- weakly sequentially continuous if for any such that implies
- (i)
- the stepsize depends on a prior estimate of the Lipschitz constant L which is very difficult to determine in practice. Moreover in many practical problems, the cost operator may not even satisfies Lipschitz condition; see, for example, Reference [19];
- (ii)
- the condition (13) weaken the convergence of the algorithm;
- (iii)
- the algorithm converges weakly to a solution of (9).
- The authors of References [18,25,26,27,32] introduced some inertial PCMs which required a prior estimate of the Lipschitz constant of the operator It is known that finding such estimate is very difficult which also slows down the rate of convergence of the algorithm. In this paper, we propose a new inertial PCM which does not require a prior estimate of the Lipschitz constant of A.
- In Reference [26], the author proposed a hybrid inertial PCM for solving monotone VIP in real Hilbert spaces. This method required computing extra projection onto the intersection of two closed convex subsets of H which can be computationally costly. Our algorithm performs only one projection onto C and no extra projection onto any subset of H.
2. Preliminaries
- (i)
- For each and
- (ii)
- For any
- (iii)
- For any and
- (i)
- (ii)
- (iii)
- (i)
- nonexpansive if
- (ii)
- quasi-nonexpansive mapping if and
- (iii)
- μ-strictly pseudocontractive if there exists a constant such that
- (iv)
- ϱ-demicontractive mapping if there exists and such that
- (i)
- is a quasi-nonexpansive mapping if ;
- (ii)
- is closed and convex.
- (i)
- If for some , then is a bounded sequence.
- (ii)
- If and , then .
3. Results
- (C1)
- and ;
- (C2)
- (C3)
- (C4)
- that is,
| Algorithm 1: GVIPCM |
Initialization: Choose , be pick arbitrarily. Iterative steps: Given the iterates and , for each calculate the iterate as follows.
|
- (i)
- for all
- (ii)
| Algorithm 2: GVIPCM |
Initialization: Choose , be pick arbitrarily. Iterative steps: Given the iterates and for each calculate the iterate as follows.
|
4. Application
- A multivalued mapping is called monotone if for all
- The graph of φ is defined by
- When is not properly contained in the graph of any other monotone operator, we say that φ is maximally monotone. Equivalently, φ is maximal if and only if for , for all implies that
| Algorithm 3: GVIPCM |
Initialization: Choose , be pick arbitrarily. Iterative steps: Given the iterates and for each calculate the iterate as follows.
|
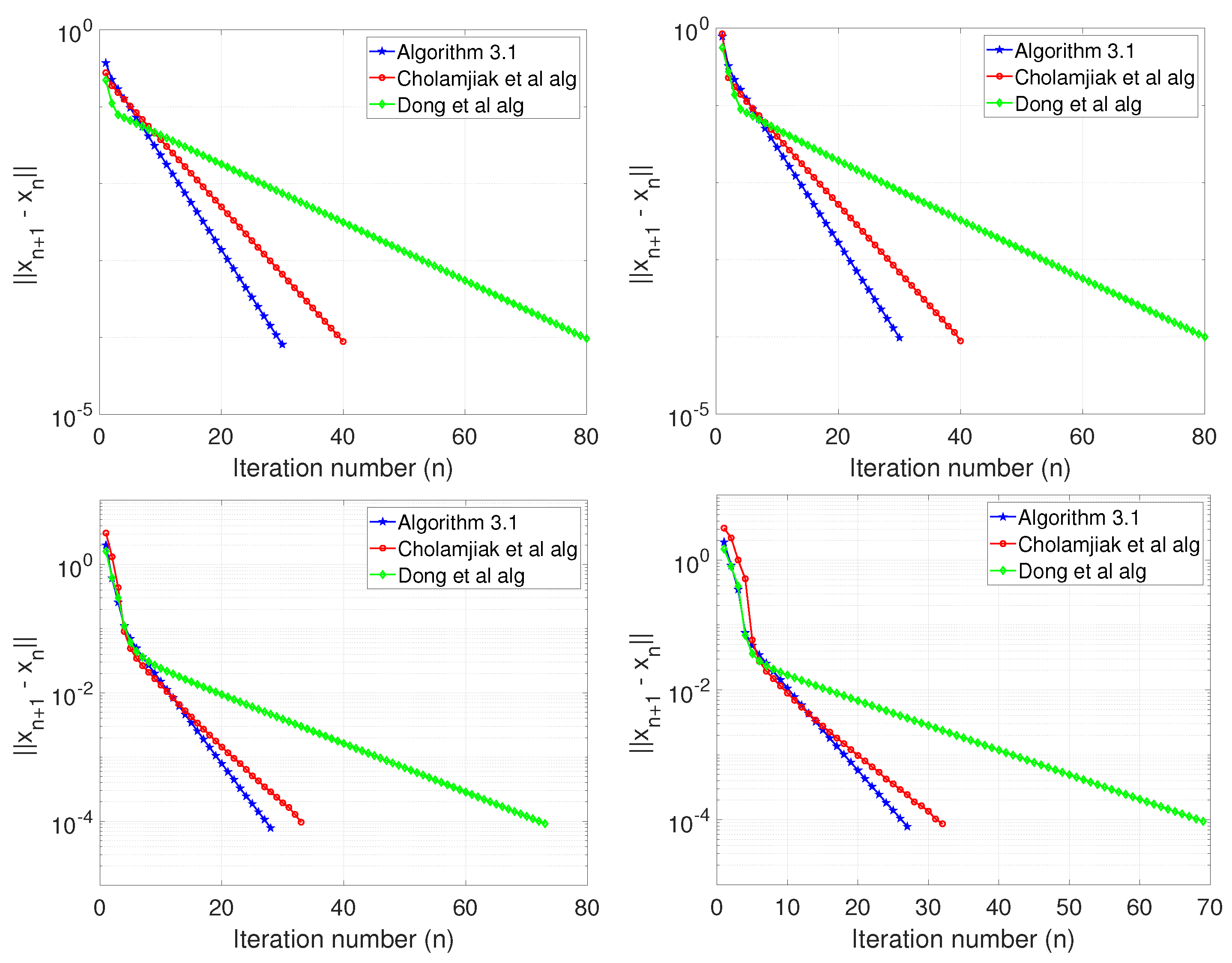
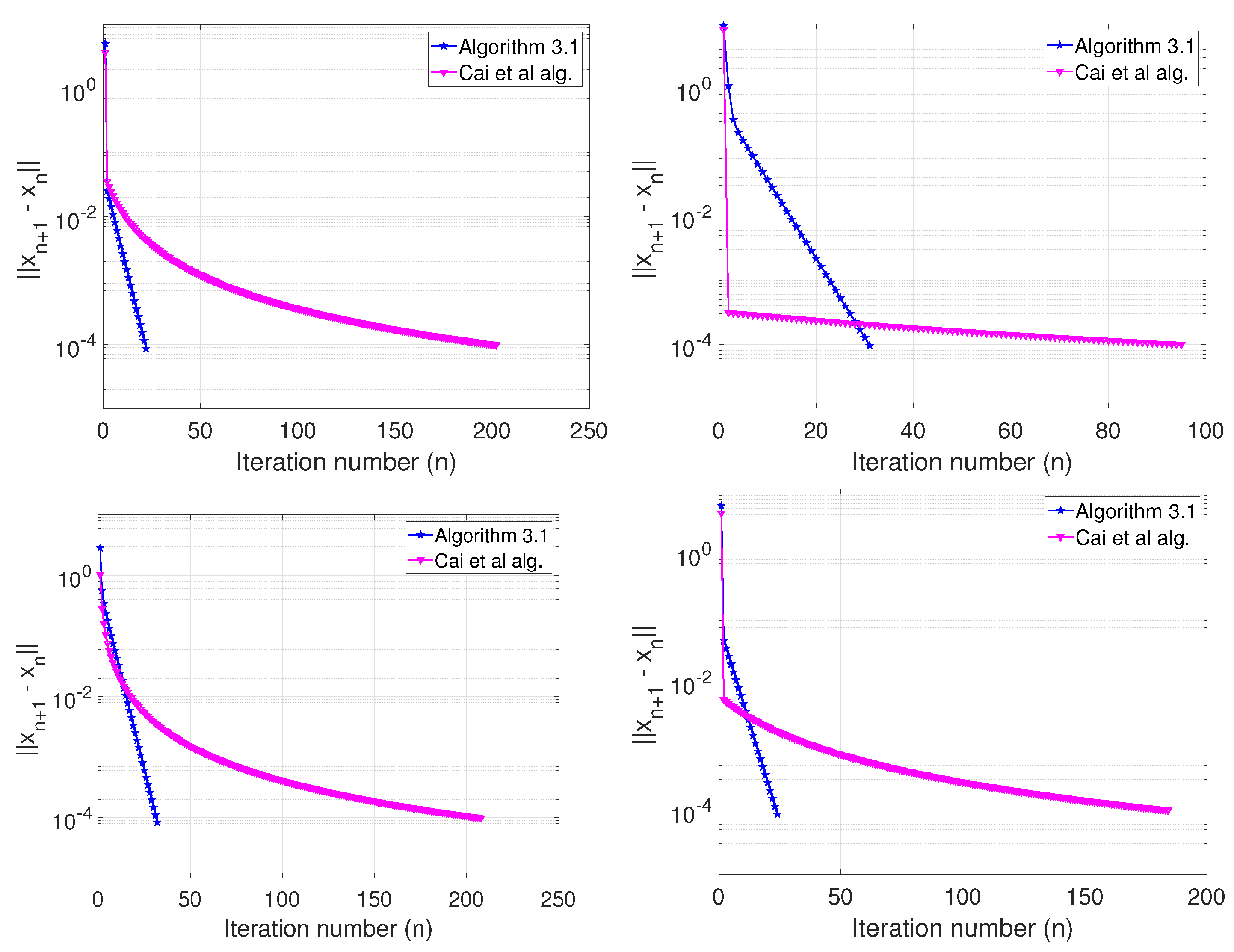
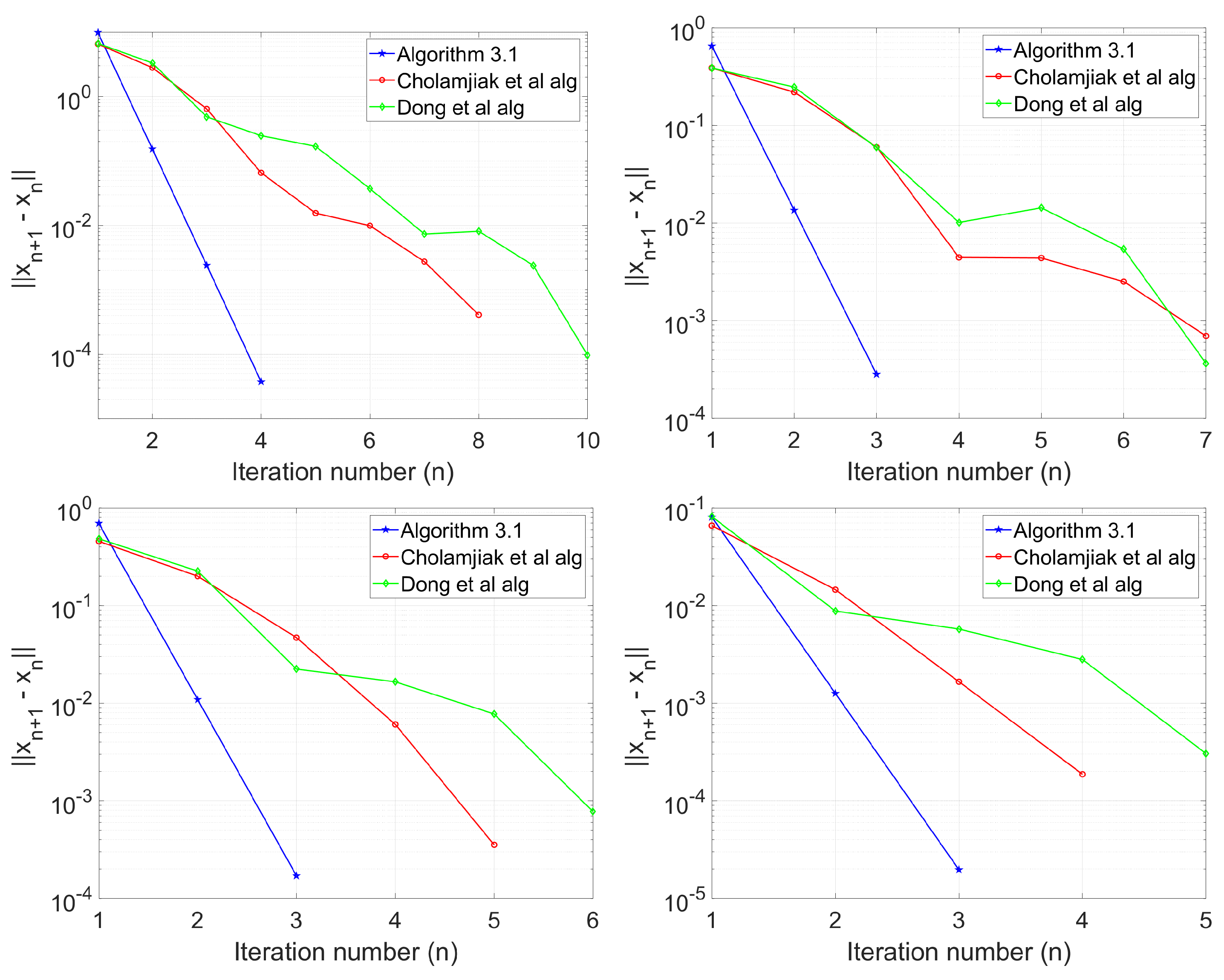
5. Numerical Examples
- Case I:
- Case II:
- Case III:
- Case IV:
- Case I:
- Case II:
- Case III:
- Case IV:
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alber, Y.; Ryazantseva, I. Nonlinear Ill-Posed Problems of Monotone Type; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Bigi, G.; Castellani, M.; Pappalardo, M.; Passacantando, M. Nonlinear Programming Technique for Equilibria; Spinger Nature: Cham, Switzerland, 2019. [Google Scholar]
- Shehu, Y. Single projection algorithm for variational inequalities in Banach spaces with applications to contact problems. Acta Math. Sci. 2020, 40, 1045–1063. [Google Scholar] [CrossRef]
- Ceng, L.C.; Hadjisavas, N.; Weng, N.C. Strong convergence theorems by a hybrid extragradient-like approximation method for variational inequalities and fixed point problems. J. Glob. Optim. 2010, 46, 635–646. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. Extensions of Korpelevich’s extragradient method for variational inequality problems in Euclidean space. Optimization 2012, 61, 119–1132. [Google Scholar] [CrossRef]
- Denisov, S.; Semenov, V.; Chabak, L. Convergence of the modified extragradient method for variational inequalities with non-Lipschitz operators. Cybern. Syst. Anal. 2015, 51, 757–765. [Google Scholar] [CrossRef]
- Fang, C.; Chen, S. Some extragradient algorithms for variational inequalities. In Advances in Variational and Hemivariational Inequalities; Springer: Cham, Switzerland, 2015; Volume 33, pp. 145–171. [Google Scholar]
- Hammad, H.A.; Ur-Rehman, H.; La Sen, M.D. Advanced algorithms and common solutions to variational inequalities. Symmetry 1198, 12, 1198. [Google Scholar] [CrossRef]
- Solodov, M.V.; Svaiter, B.F. A new projection method for variational inequality problems. SIAM J. Control Optim. 1999, 37, 765–776. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. Strong convergence of subgradient extragradient methods for the variational inequality problem in Hilbert space. Optim. Methods Softw. 2011, 26, 827–845. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert spaces. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef]
- Hieu, D.V. Parallel and cyclic hybrid subgradient extragradient methods for variational inequalities. Afr. Mat. 2017, 28, 677–679. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Taiwo, A.; Alakoya, T.O.; Mewomo, O.T. A self adaptive inertial subgradient extragradient algorithm for variational inequality and common fixed point of multivalued mappings in Hilbert spaces. Demonstr. Math. 2019, 52, 183–203. [Google Scholar] [CrossRef]
- Yang, J.; Liu, H. The subgradient extragradient method extended to pseudomonotone equilibrium problems and fixed point problems in Hilbert space. Optim. Lett. 2020, 14, 1803–1816. [Google Scholar] [CrossRef]
- Cai, X.; Gu, G.; He, B. On the O(1/t) convergence rate of the projection and contraction methods for variational inequalities with Lipschitz continuous monotone operators. Comput. Optim. Appl. 2014, 57, 339–363. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Taiwo, A.; Alakoya, T.O.; Mewomo, O.T. A unified algorithm for solving variational inequality and fixed point problems with application to the split equality problem. Comput. Appl. Math. 2019, 39. [Google Scholar] [CrossRef]
- Alakoya, T.O.; Jolaoso, L.O.; Mewomo, O.T. Modified inertial subgradient extragradient method with self-adaptive stepsize for solving monotone variational inequality and fixed point problems. Optimization 2020. [Google Scholar] [CrossRef]
- Thong, D.V.; Vinh, N.T.; Cho, Y.J. New strong convergence theorem of the inertial projection and contraction method for variational inequality problems. Numer. Algorithms 2020, 84, 285–305. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Aphane, M. Weak and strong convergence Bregman extragradient schemes for solving pseudo-monotone and non-Lipschitz variational inequalities. J. Ineq. Appl. 2020, 2020, 195. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Taiwo, A.; Alakoya, T.O.; Mewomo, O.T. A strong convergence theorem for solving pseudo-monotone variational inequalities using projection methods in a reflexive Banach space. J. Optim. Theory Appl. 2020, 185, 744–766. [Google Scholar] [CrossRef]
- Korpelevich, G.M. The extragradient method for finding saddle points and other problems. Ekon. Mat. Metody. 1976, 12, 747–756. (In Russian) [Google Scholar]
- Nadezhkina, N.; Takahashi, W. Weak convergence theorem by an extragradient method for nonexpansive mappings and monotone mappings. J. Optim. Theory Appl. 2006, 128, 191–201. [Google Scholar] [CrossRef]
- Vuong, P.T. On the weak convergence of the extragradient method for solving pseudo-monotone variational inequalities. J. Optim. Theory Appl. 2018, 176, 399–409. [Google Scholar] [CrossRef]
- He, B.S. A class of projection and contraction methods for monotone variational inequalities. Appl. Math. Optim. 1997, 35, 69–76. [Google Scholar] [CrossRef]
- Thong, D.V.; Hieu, D.V. Modified subgradient extragdradient algorithms for variational inequalities problems and fixed point algorithms. Optimization 2018, 67, 83–102. [Google Scholar] [CrossRef]
- Tian, M.; Jiang, B.N. Inertial hybrid algorithm for variational inequality problems in Hilbert spaces. J. Ineq. Appl. 2020, 2020, 12. [Google Scholar] [CrossRef]
- Cholamjiak, P.; Thong, D.V.; Cho, Y.J. A novel inertial projection and contraction method for solving pseudomonotone variational inequality problem. Acta Appl. Math. 2020, 169, 217–245. [Google Scholar] [CrossRef]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. U.S.S.R. Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Bot, R.I.; Csetnek, E.R.; Hendrich, C. Inertial Douglas-Rachford splitting for monotone inclusions. Appl. Math. Comput. 2015, 256, 472–487. [Google Scholar] [CrossRef]
- Chambole, A.; Dossal, C.H. On the convergence of the iterates of the “fast shrinkage/thresholding algorithm”. J. Optim. Theory Appl. 2015, 166, 968–982. [Google Scholar] [CrossRef]
- Dong, Q.-L.; Lu, Y.Y.; Yang, J. The extragradient algorithm with inertial effects for solving the variational inequality. Optimization 2016, 65, 2217–2226. [Google Scholar] [CrossRef]
- Dong, Q.L.; Cho, Y.J.; Zhong, L.L.; Rassias, T.M. Inertial projection and contraction algorithms for variational inequalites. J. Glob. Optim. 2018, 70, 687–704. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Alakoya, T.O.; Taiwo, A.; Mewomo, T.O. An inertial extragradient method via viscosity approximation approach for solving equilibrium problem in Hilbert spaces. Optimization 2020. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Oyewole, K.O.; Okeke, C.C.; Mewomo, O.T. A unified algorithm for solving split generalized mixed equilibrium problem and fixed point of nonspreading mapping in Hilbert space. Demonstr. Math. 2018, 51, 211–232. [Google Scholar] [CrossRef]
- Moudafi, A. Viscosity approximation method for fixed-points problems. J. Math. Anal. Appl. 2000, 241, 46–55. [Google Scholar] [CrossRef]
- Xu, H.K. Viscosity approximation method for nonexpansive mappings. J. Math. Anal. Appl. 2004, 298, 279–291. [Google Scholar] [CrossRef]
- Iiduka, H. Acceleration method for convex optimization over the fixed point set of a nonexpansive mappings. Math. Prog. Ser. A 2015, 149, 131–165. [Google Scholar] [CrossRef]
- Mainge, P.E. A hybrid extragradient viscosity method for monotone operators and fixed point problems. SIAM J. Control Optim. 2008, 49, 1499–1515. [Google Scholar] [CrossRef]
- Maingé, P.E. Projected subgradient techniques and viscosity methods for optimization with variational inequality constraints. Eur. J. Oper. Res. 2010, 205, 501–506. [Google Scholar] [CrossRef]
- Rudin, W. Functional Analysis, McGraw-Hill Series in Higher Mathematics; McGraw-Hill: New York, NY, USA, 1991. [Google Scholar]
- Marino, G.; Xu, H.K. Weak and strong convergence theorems for strict pseudo-contraction in Hilbert spaces. J. Math. Anal. Appl. 2007, 329, 336–346. [Google Scholar] [CrossRef]
- Maingé, P.E. Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set-Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Cottle, R.W.; Yao, J.C. Pseudo-monotone complementarity problems in Hilbert space. J. Optim. Theory Appl. 1992, 75, 281–295. [Google Scholar] [CrossRef]
- Yamada, I. The hybrid steepest-descent method for variational inequalities problems over the intersection of the fixed point sets of nonexpansive mappings. In Inherently Parallel Algorithms in Feasibility and Optimization and Their Applications; Butnariu, D., Censor, Y., Reich, S., Eds.; North-Holland: Amsterdam, The Netherlands, 2001; pp. 473–504. [Google Scholar]
- Maingé, P.E. Approximation methods for common fixed points of nonexpansive mappings in Hilbert spaces. J. Math. Anal. Appl. 2007, 325, 469–479. [Google Scholar] [CrossRef]
- Byrne, C. A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2004, 20, 103–120. [Google Scholar] [CrossRef]
- Censor, Y.; Elfving, T. A multiprojection algorithm using Bregman projections in a product space. Numer. Alg. 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A.A. A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51, 2353–2365. [Google Scholar] [CrossRef]
- Censor, Y.; Elfving, T.; Kopf, N.; Bortfeld, T. The multiple-sets split feasibility problem and its applications for inverse problems. Inverse Probl. 2005, 21, 2071–2084. [Google Scholar] [CrossRef]
- Dong, Q.L.; Jiang, D.; Cholamjiak, P.; Shehu, Y. A strong convergence result involving an inertial forward-backward algorithm for monotone inclusions. J. Fixed Point Theory Appl. 2017, 19, 3097–3118. [Google Scholar] [CrossRef]
- Cholamjiak, P.; Suantai, S.; Sunthrayuth, P. Strong convergence of a general viscosity explicit rule for the sum of two monotone operators in Hilbert spaces. J. Appl. Anal. Comput. 2019, 9, 2137–2155. [Google Scholar] [CrossRef]
- Cholamjiak, P.; Suantai, S.; Sunthrayuth, P. An explicit parallel algorithm for solving variational inclusion problem and fixed point problem in Banach spaces. Banach J. Math. Anal. 2020, 14, 20–40. [Google Scholar] [CrossRef]
- Kesornprom, S.; Cholamjiak, P. Proximal type algorithms involving linesearch and inertial technique for split variational inclusion problem in hilbert spaces with applications. Optimization 2019, 68, 2365–2391. [Google Scholar] [CrossRef]
- Shehu, Y. On a modified extragradient method for variational inequality problem with application to industrial electricity production. J. Ind. Appl. Math. 2019, 15, 319–342. [Google Scholar]
- Yen, L.H.; Muu, L.D.; Huyen, N.T.T. An algorithm for a class of split feasibility problems: Application to a model in electricity production. Math. Meth. Oper. Res. 2016, 84, 549–565. [Google Scholar] [CrossRef]
- Xue, G.L.; Ye, Y.Y. An efficient algorithm for minimizing a sum of Euclidean norms with applications. SIAM J. Optim. 1997, 7, 1017–1036. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Algorithm 1 | Cholamjiak et al. [27] | Dong et al. [32] | ||
|---|---|---|---|---|
| No of Iter. | 30 | 40 | 80 | |
| Time (sec) | 0.0136 | 0.0181 | 0.0471 | |
| No of Iter. | 30 | 40 | 80 | |
| Time (sec) | 0.0156 | 0.0195 | 0.0442 | |
| No of Iter. | 28 | 33 | 73 | |
| Time (sec) | 0.0141 | 0.0172 | 0.0370 | |
| No of Iter. | 27 | 32 | 69 | |
| Time (sec) | 0.0163 | 0.0201 | 0.0516 |
| Algorithm 1 | Cai et al. [15] | ||
|---|---|---|---|
| Case I | No of Iter. | 22 | 202 |
| Time (sec) | 0.0463 | 1.9129 | |
| Case II | No of Iter. | 31 | 95 |
| Time (sec) | 0.0097 | 0.0477 | |
| Case III | No of Iter. | 32 | 208 |
| Time (sec) | 0.0110 | 1.1696 | |
| Case IV | No of Iter. | 24 | 184 |
| Time (sec) | 0.0057 | 1.1250 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jolaoso, L.O.; Aphane, M. A Generalized Viscosity Inertial Projection and Contraction Method for Pseudomonotone Variational Inequality and Fixed Point Problems. Mathematics 2020, 8, 2039. https://doi.org/10.3390/math8112039
Jolaoso LO, Aphane M. A Generalized Viscosity Inertial Projection and Contraction Method for Pseudomonotone Variational Inequality and Fixed Point Problems. Mathematics. 2020; 8(11):2039. https://doi.org/10.3390/math8112039
Chicago/Turabian StyleJolaoso, Lateef Olakunle, and Maggie Aphane. 2020. "A Generalized Viscosity Inertial Projection and Contraction Method for Pseudomonotone Variational Inequality and Fixed Point Problems" Mathematics 8, no. 11: 2039. https://doi.org/10.3390/math8112039
APA StyleJolaoso, L. O., & Aphane, M. (2020). A Generalized Viscosity Inertial Projection and Contraction Method for Pseudomonotone Variational Inequality and Fixed Point Problems. Mathematics, 8(11), 2039. https://doi.org/10.3390/math8112039