Implicit Equations of the Henneberg-Type Minimal Surface in the Four-Dimensional Euclidean Space



{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Weierstrass Equations for a Minimal Surface in 𝔼4
3. Henneberg Family of Surfaces
Algebraic Henneberg-Type Minimal Surface
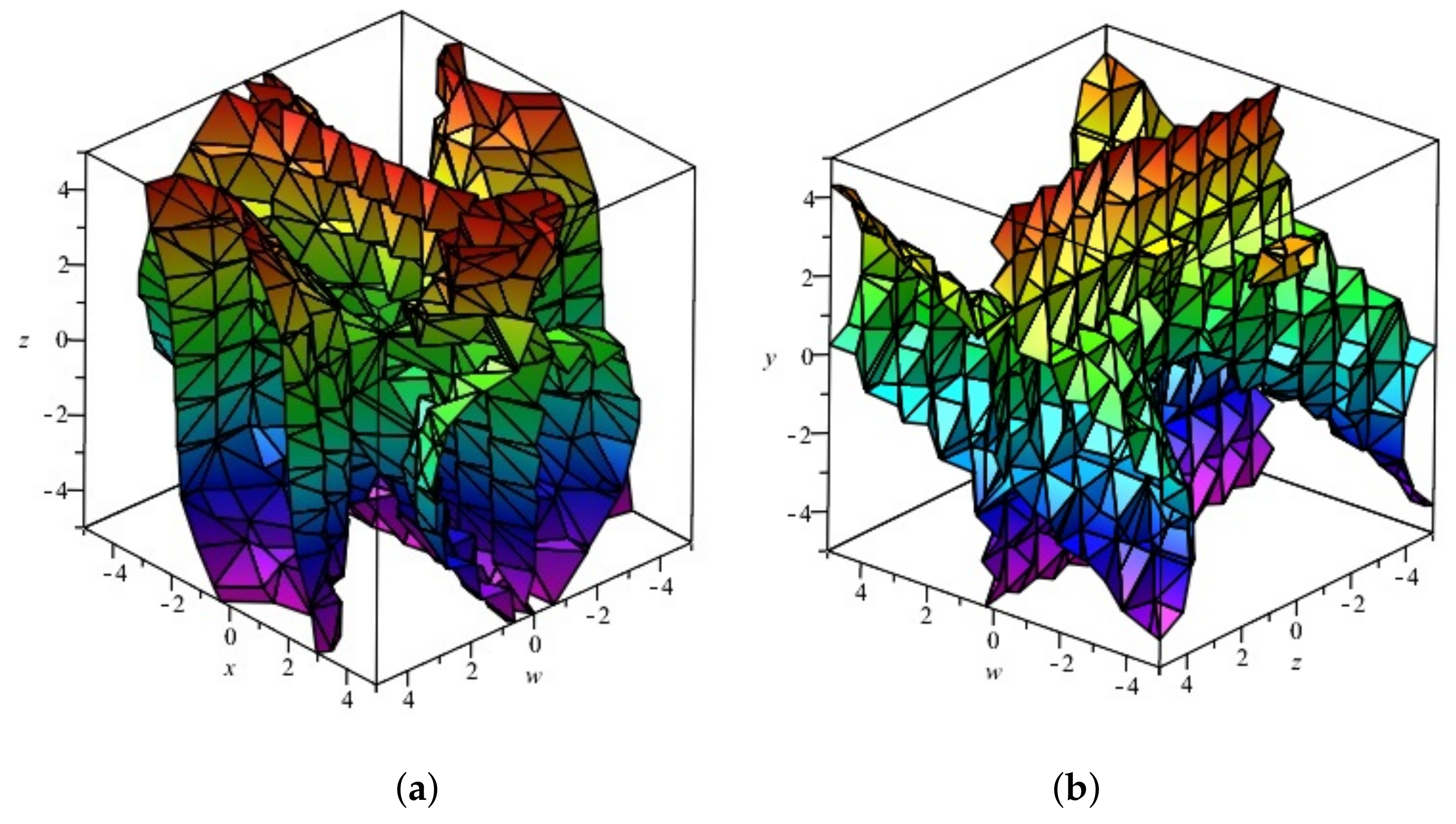
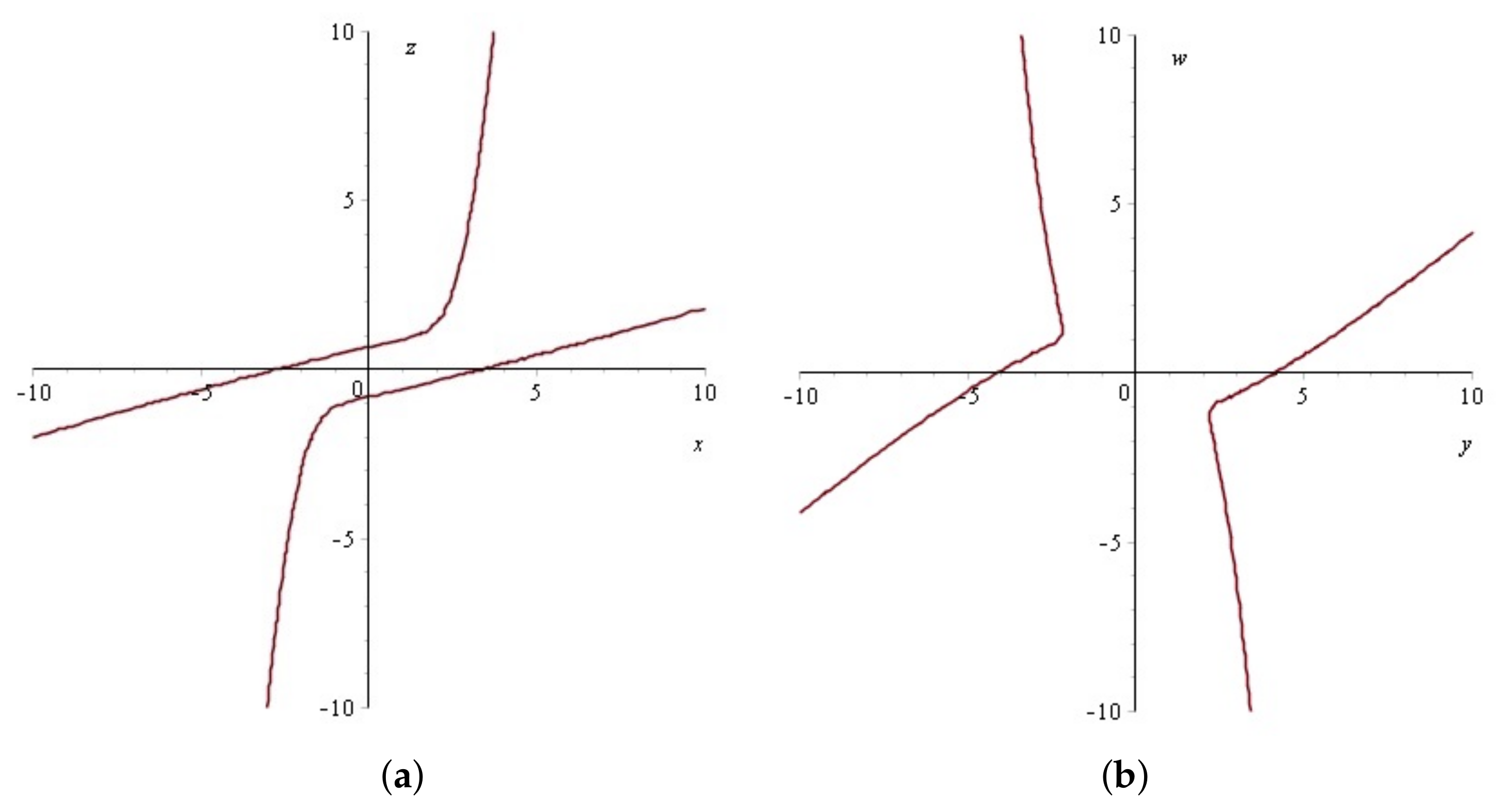
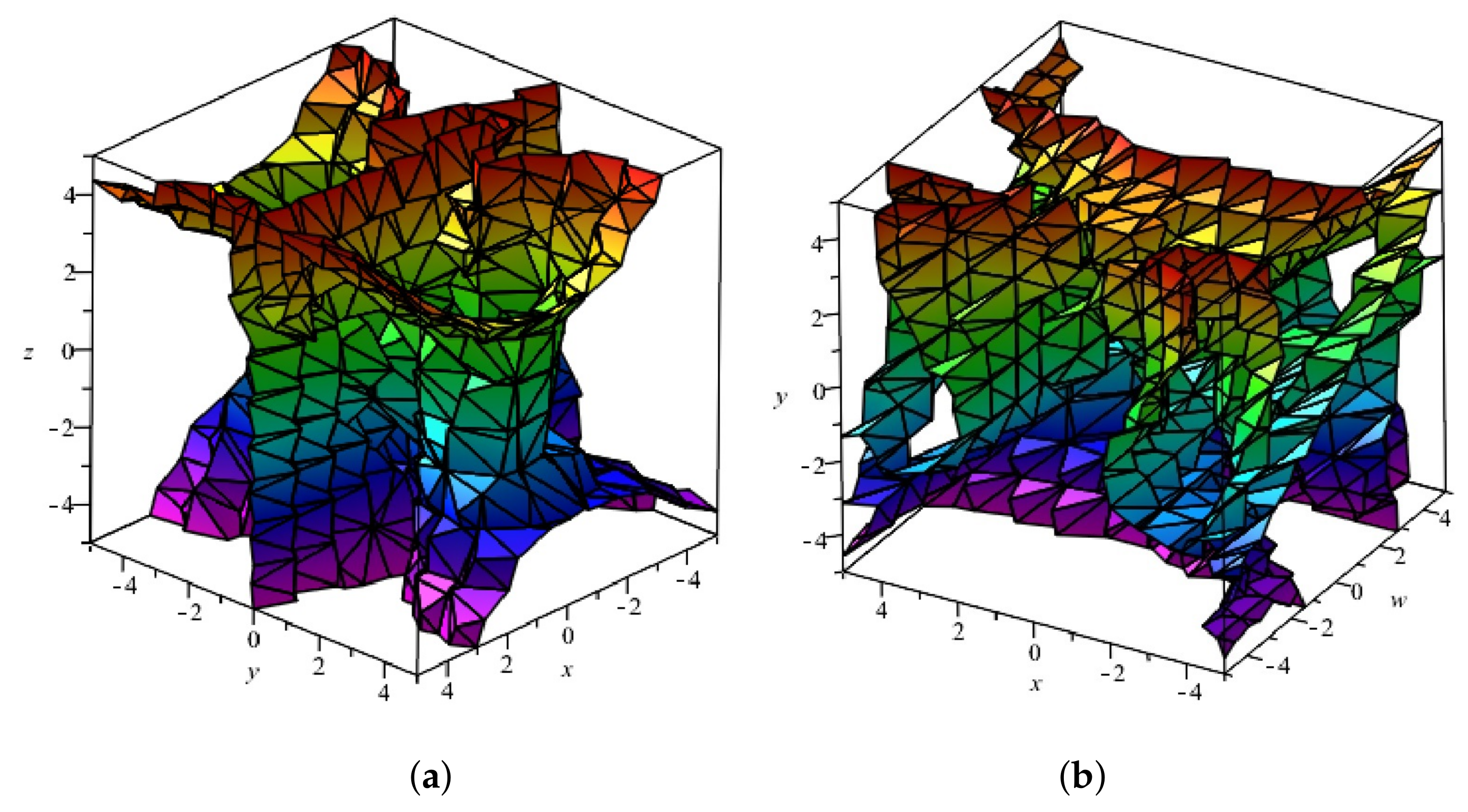
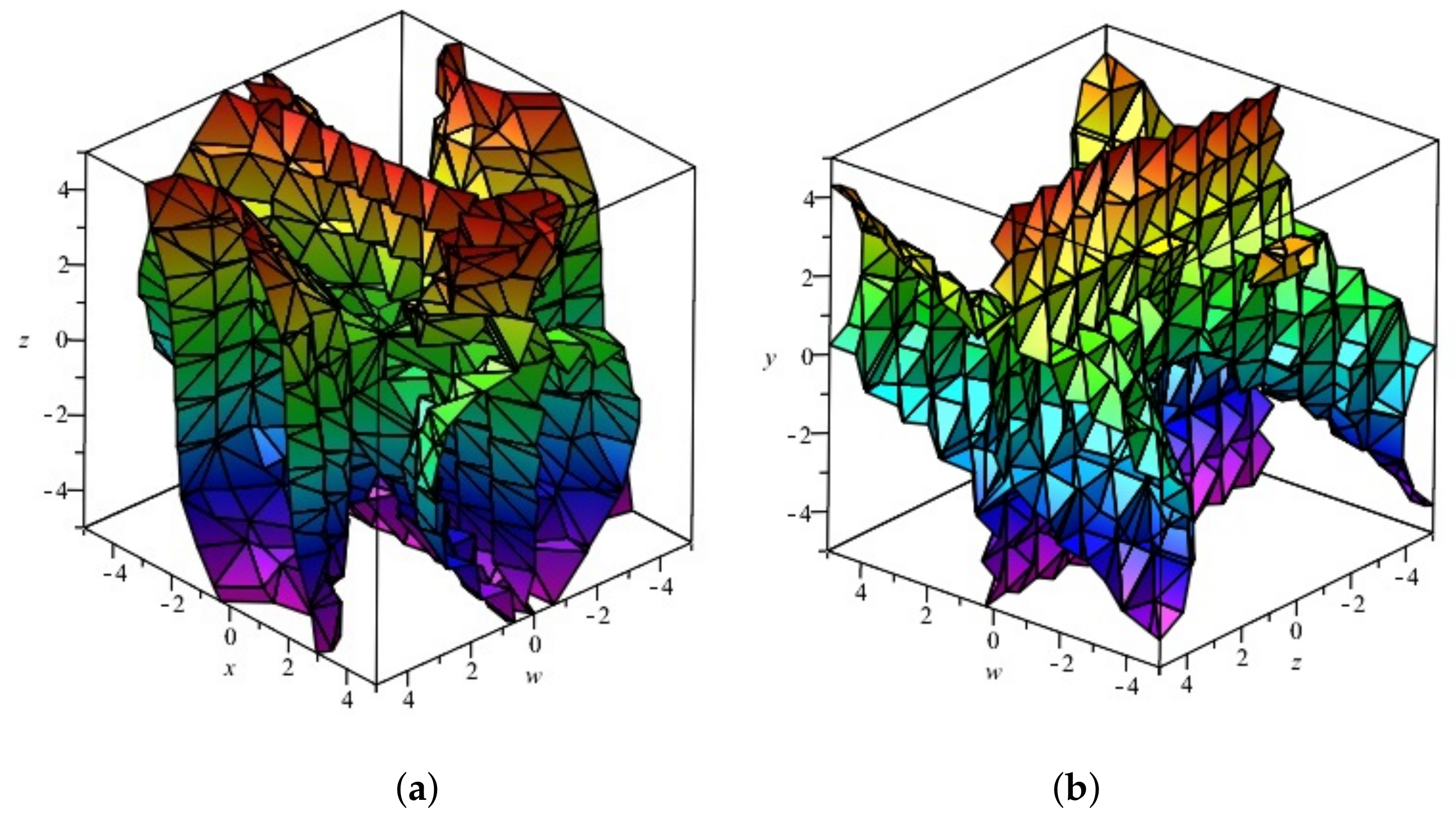
4. Maple Codes and Figures for Algebraic Henneberg Surface in 𝔼4
Author Contributions
Funding
Conflicts of Interest
References
- Darboux, G. Lecons sur la Theorie Generate des Surfaces III; Gauthier-Villars: Paris, France, 1894. [Google Scholar]
- Eisenhart, L.P. A Treatise on the Differential Geometry of Curves and Surfaces; Dover Publications: New York, NY, USA, 1909. [Google Scholar]
- Bour, E. Théorie de la déformation des surfaces. J. l’Êcole Polytech. 1862, 22, 1–148. [Google Scholar]
- Henneberg, L. Über Salche Minimalfläche, Welche Eine Vorgeschriebene Ebene Curve sur Geodätishen Line Haben. Ph.D. Thesis, Eidgenössisches Polythechikum, Zürich, Switzerland, 1875. [Google Scholar]
- Henneberg, L. Über diejenige minimalfläche, welche die Neilsche Parabel zur ebenen geodätischen Linie hat. Wolf Z. 1876, XXI, 17–21. [Google Scholar]
- Henneberg, L. Über die Evoluten der ebenen algebraischen Curven. Wolf Z. 1876, 21, 71–72. [Google Scholar]
- Henneberg, L. Bestimmung der niedrigsten classenzahl der algebraischen minimalflachen. Ann. Mat. Pura Appl. 1878, 9, 54–57. [Google Scholar] [CrossRef]
- Weierstrass, K. Untersuchungen über die flächen, deren mittlere Krümmung überall gleich null ist. Preuss Akad. Wiss. 1866, III, 219–220. [Google Scholar]
- Weierstrass, K. Mathematische Werke; Mayer & Muller: Berlin, Germany, 1903; Volume 3. [Google Scholar]
- Takahashi, T. Minimal immersions of Riemannian manifolds. J. Math. Soc. Jpn. 1966, 18, 380–385. [Google Scholar] [CrossRef]
- Osserman, R. A Survey of Minimal Surfaces; Van Nostrand Reinhold Co.: New York, NY, USA, 1969. [Google Scholar]
- Hoffman, D.A.; Osserman, R. The Geometry of the Generalized Gauss Map; American Mathematical Society: Providence, RI, USA, 1980. [Google Scholar]
- Lawson, H.B. Lectures on Minimal Submanifolds, 2nd ed.; Mathematics Lecture Series 9; Publish or Perish, Inc.: Wilmington, NC, USA, 1980; Volume I. [Google Scholar]
- Do Carmo, M.; Dajczer, M. Helicoidal surfaces with constant mean curvature. Tohoku Math. J. 1982, 34, 351–367. [Google Scholar] [CrossRef]
- De Oliveira, M.E.G.G. Some new examples of nonorientable minimal surfaces. Proc. Am. Math. Soc. 1986, 98, 629–636. [Google Scholar] [CrossRef]
- Nitsche, J.C.C. Lectures on Minimal Surfaces. Vol. 1. Introduction, Fundamentals, Geometry and Basic Boundary Value Problems; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- Small, A.J. Minimal surfaces in ℝ3 and algebraic curves. Differ. Geom. Appl. 1992, 2, 369–384. [Google Scholar] [CrossRef]
- Small, A.J. Linear structures on the collections of minimal surfaces in ℝ3 and ℝ4. Ann. Glob. Anal. Geom. 1994, 12, 97–101. [Google Scholar] [CrossRef]
- Ikawa, T. Bour’s theorem and Gauss map. Yokohama Math. J. 2000, 48, 173–180. [Google Scholar]
- Ikawa, T. Bour’s theorem in Minkowski geometry. Tokyo J. Math. 2001, 24, 377–394. [Google Scholar] [CrossRef]
- Gray, A.; Abbena, E.; Salamon, S. Modern Differential Geometry of Curves and Surfaces with Mathematica®, 3rd ed.; Studies in Advanced Mathematics; Chapman & Hall/CRC: Boca Raton, FL, USA, 2006. [Google Scholar]
- Güler, E.; Turgut Vanlı, A. Bour’s theorem in Minkowski 3-space. J. Math. Kyoto Univ. 2006, 46, 47–63. [Google Scholar] [CrossRef]
- Güler, E.; Yaylı, Y.; Hacısalihoğlu, H.H. Bour’s theorem on the Gauss map in 3-Euclidean space. Hacet. J. Math. Stat. 2010, 39, 515–525. [Google Scholar]
- Güler, E.; Yaylı, Y. Generalized Bour theorem. Kuwait J. Sci. 2015, 42, 79–90. [Google Scholar]
- Ji, F.; Kim, Y.H. Mean curvatures and Gauss maps of a pair of isometric helicoidal and rotation surfaces in Minkowski 3-space. J. Math. Anal. Appl. 2010, 368, 623–635. [Google Scholar] [CrossRef]
- Ji, F.; Kim, Y.H. Isometries between minimal helicoidal surfaces and rotation surfaces in Minkowski space. Appl. Math. Comput. 2013, 220, 1–11. [Google Scholar] [CrossRef]
- Dierkes, U.; Hildebrandt, S.; Sauvigny, F. Minimal Surfaces, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Moore, C. Surfaces of rotation in a space of four dimensions. Ann. Math. 1919, 21, 81–93. [Google Scholar] [CrossRef]
- Ganchev, G.; Milousheva, V. An invariant theory of surfaces in the four-dimensional Euclidean or Minkowski space. Pliska Stud. Math. Bulg. 2012, 21, 177–200. [Google Scholar]
- Güler, E.; Kişi, Ö. Weierstrass representation, degree and classes of the surfaces in the four dimensional Euclidean space. Celal Bayar Univ. J. Sci. 2017, 13, 155–163. [Google Scholar] [CrossRef]
- Arslan, K.; Kılıç Bayram, B.; Bulca, B.; Öztürk, G. Generalized Rotation Surfaces in 𝔼4. Results Math. 2012, 61, 315–327. [Google Scholar] [CrossRef]
- Xu, G.; Rabczuk, T.; Güler, E.; Wu, X.; Hui, K.; Wang, G. Quasi-harmonic Bezier approximation of minimal surfaces for finding forms of structural membranes. Comput. Struct. 2015, 161, 55–63. [Google Scholar] [CrossRef]
- Arslan, K.; Bayram, B.; Bulca, B.; Öztürk, G. On translation surfaces in 4-dimensional Euclidean space. Acta Comment. Univ. Tartu. Math. 2016, 20, 123–133. [Google Scholar] [CrossRef]
- Güler, E.; Magid, M.; Yaylı, Y. Laplace Beltrami operator of a helicoidal hypersurface in four space. J. Geom. Symmetry Phys. 2016, 41, 77–95. [Google Scholar] [CrossRef]
- Arslan, K.; Bulca, B.; Kosova, D. On generalized rotational surfaces in Euclidean spaces. J. Korean Math. Soc. 2017, 54, 999–1013. [Google Scholar] [CrossRef]
- The Hieu, D.; Ngoc Thang, N. Bour’s theorem in 4-dimensional Euclidean space. Bull. Korean Math. Soc. 2017, 54, 2081–2089. [Google Scholar]
- Güler, E.; Hacısalihoğlu, H.H.; Kim, Y.H. The Gauss map and the third Laplace-Beltrami operator of the rotational hypersurface in 4-Space. Symmetry 2018, 10, 398. [Google Scholar] [CrossRef]
- Güler, E. Isometric deformation of (m, n)-type helicoidal surface in the three dimensional Euclidean space. Mathematics 2018, 6, 226. [Google Scholar] [CrossRef]
- Cox, D.; Little, J.; O’Shea, D. Ideals, Varieties, and Algorithms. An Introduction to Computational Algebraic Geometry and Commutative Algebra, 3rd ed.; Undergraduate Texts in Mathematics; Springer: New York, NY, USA, 2007. [Google Scholar]
- Faugère, J.C. FGb: A library for computing Gröbner bases. In Proceedings of the Third International Congress Conference on Mathematical Software (ICMS’10), Kobe, Japan, 13–17 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 84–87. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Güler, E.; Kişi, Ö.; Konaxis, C. Implicit Equations of the Henneberg-Type Minimal Surface in the Four-Dimensional Euclidean Space. Mathematics 2018, 6, 279. https://doi.org/10.3390/math6120279
Güler E, Kişi Ö, Konaxis C. Implicit Equations of the Henneberg-Type Minimal Surface in the Four-Dimensional Euclidean Space. Mathematics. 2018; 6(12):279. https://doi.org/10.3390/math6120279
Chicago/Turabian StyleGüler, Erhan, Ömer Kişi, and Christos Konaxis. 2018. "Implicit Equations of the Henneberg-Type Minimal Surface in the Four-Dimensional Euclidean Space" Mathematics 6, no. 12: 279. https://doi.org/10.3390/math6120279
APA StyleGüler, E., Kişi, Ö., & Konaxis, C. (2018). Implicit Equations of the Henneberg-Type Minimal Surface in the Four-Dimensional Euclidean Space. Mathematics, 6(12), 279. https://doi.org/10.3390/math6120279