Abstract
Quaternion-valued neural networks (QVNNs) that have multiple types of delays (leakage, time-varying, distributed, and neutral) and defined on time scales are discussed in this paper. Quaternions form a 4D normed division algebra and allow for a better representation of 3D and 4D data. QVNNs have been proposed and applications have appeared lately. Time-scale calculus was developed to allow the joint treatment of systems, or any hybrid mixing of them, and was also applied with success to the analysis of dynamic properties for neural networks (NNs). Because of its generality, encompassing the common properties of discrete-time (DT) and continuous-time (CT) NNs, time-scale NNs dynamics research does not benefit from a fully-developed Lyapunov theory. So, Halanay-type inequalities have to be used instead. To this end, we provide a novel generalization of inequalities of Halanay-type on time scales specifically suited for neutral systems, i.e., systems with neutral delays. Then, this new lemma is employed to obtain sufficient conditions presented both as linear matrix inequalities (LMIs) and as algebraic inequalities for the exponential stability and exponential synchronization of QVNNs on time scales with the mentioned delay types. The model put forward in this paper has a generality which is appealing for practical applications, in which both DT and CT dynamics are interesting, and all the discussed types of delays appear. For both the DT and CT scenarios, four numerical applications are used to illustrate the four theorems put forward in this research.
Keywords:
time delays; quaternion-valued neural networks (QVNNs); time scales; stability analysis; synchronization analysis MSC:
93C10; 93C43; 93D23
1. Introduction
Over the last period, QVNNs have received increasing research interest. Introduced for the first time in [1], presently, they have applications in image classification, speech recognition, and signal processing (for a recent survey of QVNNs, see [2]). Because quaternions are four-dimensional numbers, they can better represent signals which were originally given in the 3D or 4D domains, without the need for decomposition into real-valued parts. Discovered by Hamilton in 1843, the quaternions are the first 4D normed division algebra that was put forward, which makes them amenable for use in NNs.
QVNNs are especially amenable to applications in domains where the data naturally has multidimensional correlated components, such as RGB image channels, which can be represented as quaternions, 3D rotations, which have a quaternion representation, or MIMO channels, which can also be encoded in the form of quaternions. In these contexts, the use of QVNNs provides better modeling of inter-channel relations, having fewer parameters than their real-valued counterparts, and thus being more efficient.
Owing to their popularity in applications, the dynamic properties of recurrent QVNNs have also begun to be studied in the recent past. Starting from paper [3], more and more papers are being published each year, discussing different dynamic properties of recurrent QVNNs, such as stability [4,5,6,7,8,9,10,11], fixed/finite-time stability [12,13], synchronization [14,15,16,17,18,19,20], fixed/finite-time synchronization [21,22,23,24,25,26], etc.
In implementations of NNs in the real-world, time delays occur due to the finite reaction time of circuit components, which might cause unwanted behavior. For this reason, it is essential to include time delays in the models used to study the dynamics of NNs [27]. Leakage delay may appear in the self-feedback term of NNs, which was considered a part of QVNN models in [4,10,28,29,30,31,32,33,34,35,36,37]. Then, distributed delays might arise as a result of the distribution, along the NN’s implementation paths, of conduction speeds. Distributed delays were added to QVNNs in [5,10,15,38,39,40,41,42,43,44]. When they are present together with the most popular types of delays that might appear in NNs, i.e., with time-varying delays, they are known as mixed delays. These were added to QVNN models in [17,26,29,30,33,45,46,47,48,49,50,51,52,53,54,55,56]. Finally, delays might appear in the derivative term of NNs, in which case, they are called neutral delays, and the resulting systems are called neutral systems. These systems exhibit more interesting dynamics than systems with the other types of delays and warrant particular study. It has als obeen proven that this type of delay appears in real-world brain response processes, which constitutes a further reason to add them to NN models. Indeed, they were considered in the context of QVNNs, most recently in [17,28,31,53,57,58,59,60,61,62,63].
However, most parts of the studies regarding the dynamics of NNs in general and QVNNs in particular are done in CT. However, in order to be implemented in circuits, NNs must be discretized in time, and there is the possibility that the dynamics of the CT model do not remain the same for its DT counterpart. For this reason, DT NNs were studied for the first time in [64]. Since then, studying the dynamics of DT NNs has become a standalone topic, which attracts more and more research interest as time passes. Discrete-time QVNN models were discussed in [4,9,19,65,66,67,68,69]. The paper [66] even separately discusses both the DT and the CT cases.
However, there is a solution to unify the study of DT and CT systems by employing time-scale calculus. Time-scale calculus was first proposed in [70] and has the advantage of encompassing both differential and difference equations in a single formulation or any combination of these. This type of generality allows for the unified study of both DT and CT NNs, or any hybrid mixing of them, also highlighting their commonalities. The calculus on time scales was further developed and synthesized in the books [71,72,73], which constitute the go-to references for further developments regarding time scales. In the context of NNs, time scales were first applied in [74]. Since then, the popularity of NN models on time scales has increased yearly. QVNNs on time scales were discussed in [9,28,35,52,75,76].
Unfortunately, the Lyapunov theory is not so developed for time scales as for differential or difference systems, since it is a more general setting, which has to encompass the common characteristics of both. For this reason, Halanay-type inequalities have been routinely employed to studying the dynamical properties of NNs defined on time scales. Several flavors of inequalities of Halanay-type have been discussed in the literature, over time; see [77,78,79,80,81]. Halanay-type inequalities on time scales were subsequently obtained by extending them to time scales in [82,83,84,85].
An interesting direction for studying time=scale NNs was proposed in papers [6,44,86,87,88,89,90], where different generalizations of Halanay-type inequalities for time scales are presented, which are then used to ascertain sufficient conditions for different dynamical properties of NNs defined on time scales. Unfortunately, none of these lemmas can be used for neutral systems, and this is the void the present paper aims to fill.
Considering all of the aforementioned issues, the paper’s primary highlights are as follows:
- 1.
- A generalized Halanay-type inequality defined on time scales for neutral systems is provided, with a demonstration, which can be used for general neutral systems defined on time scales, not just for NNs.
- 2.
- The very general QVNN model defined on time scales and with multiple types of delays (leakage, time-varying, distributed, and neutral) is presented.
- 3.
- The application of the proposed generalization for a Halanay-type inequality is facilitated by the formulation of different types of general Lyapunov-like functions.
- 4.
- Based on these, four theorems are proved, which formulate sufficient criteria given in terms of algebraic inequalities and LMIs which ensure that, for the discussed general model, the exponential stability and exponential synchronization properties are satisfied.
- 5.
- For both the DT and CT scenarios, four numerical applications are used to illustrate the four theorems.
- 6.
- The generality of the model allows it to be tailored for DT and CT NNs, or any hybrid mixing of them, and also for real-valued or complex-valued NNs, with possibly fewer types of delays. To our awareness, in the existing literature, the corresponding results have not yet been published.
The obtained results are applicable to real-world domains where recurrent QVNNs are used in order to study their dynamic properties, leading to model designs better fitted for these particular applications. The application domains of recurrent QVNNs include signal and image processing, robotic control, or memory and cognitive modeling.
The research is organized as follows. The basics of time-scale calculus, the generalization for neutral systems of the Halanay-type inequality, a few other lemmas, and the QVNN model are all the subject of Section 2. Then, the four main theorems, which all use the proposed lemma in their proofs, are given in Section 3, to ascertain the exponential stability and exponential synchronization properties of the introduced QVNNs, and are afterwards illustrated by way of numerical applications in Section 4. In Section 5, the research’s conclusions are provided.
Notations:— norm, , —X is negative definite, —transpose of X, and —smallest eigenvalue of X.
2. Preliminaries
Mainly based on [71], we first provide an introduction to time-scale calculus. A non-empty closed subset of the real number set , from which the topology and ordering are inherited, is called a time-scale . , the forward jump operator is defined as and the backward jump operator as . The forward graininess function is defined as , , . Also put .
Once this is established, a point is right (left)-dense if () and right (left)-scattered if (). , where m is the left-scattered maximum of , if it exists, otherwise . If for any right-dense , and exists for any left-dense , then the function is called rd-continuous. designates the set of all functions , which are rd-continuous. The jump operators are defined as and , respectively, for a function . If and , , then function is said to be regressive, and we denote by the set of all regressive functions. The set denotes all positively regressive functions, which are functions , for which and , . We establish the following formula: , , . For any set , we define .
Given a function , the number denoted by for , such that for , there exists a , so that the subsequent inequality is valid :
represents, if it exists, the -derivative of f at t. The function f is said to be -differentiable if the -derivative exists .
The inverse operation of -differentiation is -integration, i.e., if , then
Lastly, for any regressive function , the -exponential function is defined by the formula:
where represents the cylinder transformation, given as
The subsequent lemmas regarding time scales are needed for proving our results:
Lemma 1
([71]). “If are Δ-differentiable, then
(i) ;
(ii) ”
Lemma 2.
If are non-negative functions and
, where the positive constants are such that , , and
then
, where satisfies
Proof.
Firstly, we consider function , defined as
Because of the hypothesis of the lemma, we have
If we take the derivative of F with respect to , we can see that
which, together with guarantees the existence of , such that . For , we get that , , which proves the existence of , so that (1) is true.
Inequality
implies that
Now, we define the function:
We are going to demonstrate that . The second inequality in the conclusion of the lemma is proved similarly. If we do not have , there are two possible cases.
In the first case, there exists a right-scattered for which , , and , and
because and, from the hypotheses of the lemma, we have
in which the last inequality is also obtained from the hypothesis of the lemma in the following way:
Thus, , which contradicts our initial assumption .
In the second case, there exists a right-dense for which , , , and . Then
because from the hypotheses of the lemma we have
Thus, , which contradicts our initial assumption .
Therefore, we proved by contradiction that , . □
Lemma 3
([87]). “If , , , then, ,
implies
On the other hand, the quaternion number set is defined as
where are the unit quaternions, and they satisfy . The addition operation is defined as
and the multiplication operation as
which immediately leads to the conclusion that the multiplication of quaternions is not commutative.
The conjugate of a quaternion h is given as , its inverse as , and its norm as . With the operations defined as above, the quaternion number set forms a normed division algebra.
In the following, we will study the dynamic properties of the QVNN model given, , , by
where is the state vector at t, , with , is the feedback connection matrix, is the connection matrix without delay, is the connection matrix with delay, is the distributed delay connection matrix, is the neutral delay connection matrix, constitute the activation functions, , is the external input vector, and the delays are leakage , time-varying , distributed , and neutral . The activation functions are also assumed to be of the form , , where . The time-varying delays are also assumed to satisfy , , for some , and we put .
Furthermore, the Lipschitz conditions will be assumed to be satisfied by the activation functions:
Assumption 1
([46]). “The activation functions satisfy the Lipschitz conditions:
, , where are the Lipschitz constants. Moreover, we put .”
Associated with System (2) are the initial conditions as follows:
, where and the norm on is .
In order to discuss synchronization, NN (2) will be considered as the drive NN, and we will define the corresponding response NN, , , by
and represents the vector of states at t and represents the control input at t, the significance of the other variables being the same as in (2).
For System (3), the initial conditions are assumed to be
, and .
Now, suppose that NN (2) possesses an equilibrium point (EP) that is unique and that is designated as . If we take , System (2) can be transformed as
, , in which , .
Associated with System (4), the initial conditions are as follows:
, and .
3. Main Results
Theorem 1.
If the following LMIs hold
where
, , , , , , , , , , , , , , , , , , , , , , , , , , , , ,
, , , , , , , , , , , , , , , , , , , , , , , , ,
in which is a positive definite (PD) matrix, are diagonal PD matrices, are any matrices, and there exist positive numbers , , , , , , which satisfy , , and
and Assumption 1 is also true, then the EP of NN (2) is exponentially stable.
Proof.
At the beginning, we put forth the following Lyapunov-like function:
By considering Lemma 1, for the positive half trajectory of NN (6), V has its -derivative given by the subsequent substantiation:
However, Assumption 1 assures us that the diagonal PD matrices exist, so that :
Moreover, for any matrices , the next identity is true:
Now, in Lemma 2, we take, :
and, using Relations (9)–(12), we obtain
in which Hypothesis (8) was used for the last inequality, and
This proves the validity of the first inequality from Lemma 2.
Going further, we have
Similarly as above, we have, from Assumption 1, that there exist diagonal PD matrices which satisfy, :
and any matrices , so that
Relations (13)–(16) allow us to write
in which, again, Hypothesis (8) was used for the last inequality, which proves the validity of the second inequality in Lemma 2. So, applying Lemma 2, we obtain
or, equivalently,
which allows us to infer the exponential stability of the EP of NN (2), precisely what we needed to prove. □
Remark 1.
The discussed model only takes into account time-varying delays, without taking into account robustness to variations or time-varying graininess, which may possibly occur in hybrid DT-CT scenarios. While we acknowledge the possibility that these may occur, we leave them as a potential future work direction, in order to not further complicate the obtained sufficient conditions.
Remark 2.
Theorem 1 gave sufficient conditions for the exponential stability of the EP of the general QVNN model (2) with leakage, time-varying, distributed, and neutral delays, defined on time scales. The results of the theorem are not directly comparable to other results in the literature, as such a general model has not yet been discussed to the best of our knowledge. However, the model can be particularized for DT or CT NNs, or hybrids of them, but also for real-valued or complex-valued NNs, which also are not present in the available literature in such a general form.
For the subsequent theorem, we need to assume that , i.e., System (2) has no leakage delay:
, .
Theorem 2.
The following inequality is true, provided that numbers , exist:
and , , where
, ,
, ,
, ,
and also when Assumption 1 is satisfied, then the EP of NN (2) is exponentially stable.
Proof.
Initially, the subsequent function of Lyapunov type is put forward:
For the positive half trajectory of NN (6), the -derivative of V has the explicitation shown below, obtained by also employing Lemma 3:
Next, in Lemma 2, we consider
Now, , and from (18), we have
where , , are the ones provided in the statement of the theorem. This proves the validity of the first inequality from Lemma 2.
Going further, we have
Relation (19) gives
, where , , are the ones provided in the statement of the theorem, which proves the validity of the second inequality in Lemma 2.
This allows us to apply Lemma 2, which gives
which is equivalent to
which allows us to infer the exponential stability of the EP of NN (2), precisely what we had to prove. □
Remark 3.
The purpose of Theorem 2 was to provide sufficient conditions given as algebraic inequalities for the exponential stability of the EP of the very general QVNN model (2) having four types of delays and being defined on time scales, which has not yet been discussed in the literature, to our knowledge. Because of this, the obtained conditions are not comparable to those of other papers, as the models put forward are different. Nonetheless, the results of this theorem can be particularized for models with fewer types of delays, with real-valued or complex-valued parameters, and defined in DT or CT, or any combination of the two, for which no available results exist, also.
The subsequent state-feedback-type controller can be designed so as to obtain synchronization between drive NN (2) and response NN (3):
in which the real positive diagonal matrices are control gain matrices. By incorporating this control scheme, System (7) has the following form:
Theorem 3.
If the following LMIs hold
where
, , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , ,
, , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , ,
Proof.
Initially, we put forward the following Lyapunov-like function:
By considering Lemma 1, for the positive half trajectory of NN (21), V has its -derivative given by the following substantiation:
However, Assumption 1 assures us that the diagonal PD matrices exist, so that :
Moreover, for any matrices , the following identity holds:
Now, , we take, in Lemma 2:
and, using Relations (23)–(26), we have
in which Hypothesis (22) was used for the last inequality, and
This proves the validity of the first inequality from Lemma 2.
Going further, we have
Similarly as above, from Assumption 1, we have that diagonal PD matrices exist, so that
, and, for any matrices , the following identity holds:
Relations (27)–(30) permit us to write
in which, again, Hypothesis (22) was used for the last inequality, which proves the validity of the second inequality in Lemma 2. So, applying Lemma 2, we obtain
or, equivalently,
which allows us to infer the exponential synchronization, under state feedback controller (20), of drive NN (2) and response NN (3), thus ending the proof. □
Remark 4.
Theorem 3 gave sufficient conditions, expressed as LMIs, for the exponential synchronization of the drive QVNN (2) and response QVNN (3) having leakage, time-varying, distributed, and neutral delays and being defined on time scales. Because of the generality of the model, the results obtained are not directly comparable to others from the literature, as this type of model has not yet been put forward, as far as we know. However, the results of the theorem can be particularized for NN models with fewer delays, with real or complex values, and defined in DT or CT, or a mixing of the two. The corresponding models have also not yet been discussed in the literature.
In the context of our last theorem, we need to put System (21) in the following form:
, .
Theorem 4.
The following inequality is true, provided that numbers , exist:
and , , where
,
, ,
,
, ,
Proof.
Initially, we put forth the subsequent function of Lyapunov type:
By considering Lemma 3, for the positive half trajectory of NN (31), V has its -derivative explicitated as
Next, we can take in Lemma 2:
Now, , from (32), we have
where , , and are the ones provided in the statement of the theorem. This proves the validity of the first inequality from Lemma 2.
Going further, we have
Relation (33) gives
, where , , are the ones provided in the statement of the theorem, which proves the validity of the second inequality in Lemma 2.
Remark 5.
The last theorem, Theorem 4, is concerned with putting forward sufficient conditions, expressed as algebraic inequalities, for the exponential synchronization of drive QVNN(2) and response QVNN (3) with four types of delays, defined on time scales. Such a general model has not yet been the focus of any of the literature, as far as we know, which means that our results are not directly comparable with other available ones. Nonetheless, the theorem can be particularized for models with fewer types of delays, with real-valued or complex-valued parameters, and for DT, CT, or hybrid NNs, which have also not yet been discussed in the literature.
4. Numerical Examples
Example 1.
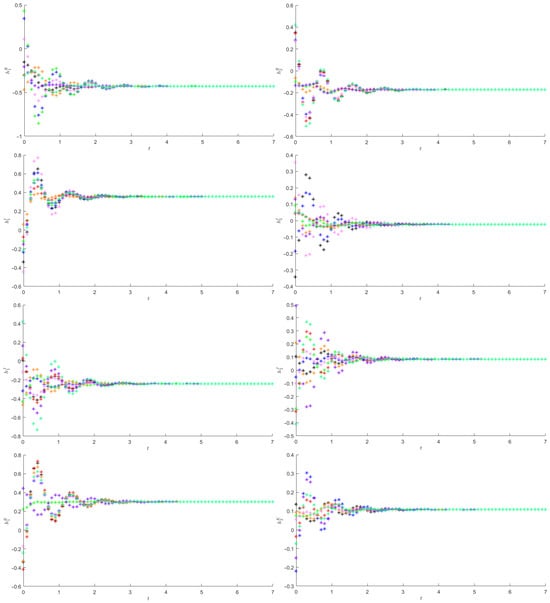
To begin with, will be the time scale considered, and, in this case, .
Let the subsequent two-neuron QVNN defined on time-scale with neutral, leakage, and mixed delays be
, .
Now, suppose that System (34) possesses an EP, designated as . By taking , System (34) can be transformed as
, , in which , .
The values of the parameter matrices will be the following:
which allows us to deduce that the activation functions fulfill Assumption 1, and
Also, we take , , , and ; thus, and .
Lastly, if we take , , , , , , , , , which yield , , and which satisfy , , and , and , , , (for the purpose of conciseness, the values of the other matrices are not shown), then we can verify that all the conditions in Theorem 1 are satisfied, from which we can infer the exponential stability of the EP of System (34).
Figure 1 depicts, starting from 8 initial values, the quaternion components of the state trajectories of and .
Figure 1.
The quaternion components of the state trajectories of and in Example 1. Eight initial points are considered, which are depicted with different colors.
Example 2.
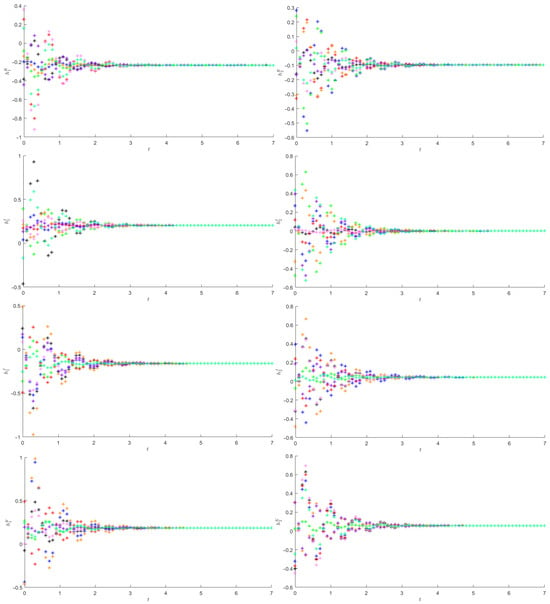
Consider again the time scale and also NN (34) with an unique EP, but with the following parameters:
which allows us to deduce that the activation functions fulfill Assumption 1, and
The delays are now (leakage delay is not present), , , , thus and .
Also, we compute , , , , , , which satisfy , , and and take , . Thus, the requirements of Theorem 2 are met, so, by applying the theorem, we get that the EP of System (34) with the above-defined parameters is exponentially stable.
Figure 2 depicts, starting from 8 initial points, the quaternion components of the state trajectories of and .
Figure 2.
The quaternion components of the state trajectories of and in Example 2. Eight initial points are considered, which are depicted with different colors.
Example 3.
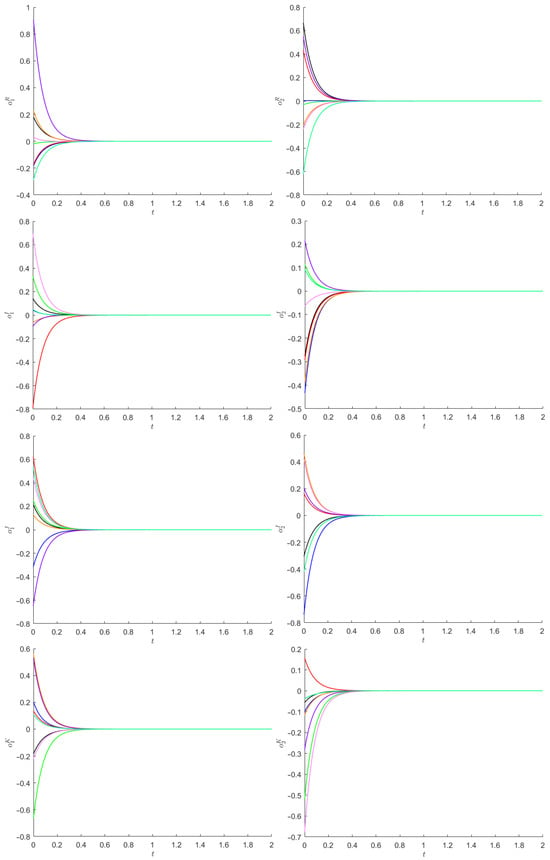
Now, consider the time scale , and, in this case, .
Also, for studying the synchronization problem, assume System (34) is the drive NN, and we will define the corresponding response NN by
, .
Now, by putting , from the expressions of Systems (34) and (36), we are able to deduce that
, , in which , .
The subsequent state-feedback-type controller can be designed so as to synchronize drive NN (34) and response NN (36),
in which the real positive diagonal matrices are control gain matrices. By incorporating this control scheme, System (37) has the following form:
The parameters are taken as
from which we deduce that the activation functions satisfy Assumption 1 and
Then, we take , , , , thus and .
We design the control gain matrices as
and, furthermore, we take , , , , , , , , , , which means that , , and also that , , and . Finally, for , , , (for the purpose of conciseness, the values of the other matrices are not shown), we can verify that all the conditions in Theorem 3 are satisfied, which allows us to conclude that System (34) is exponentially synchronized with System (36) under controller (38).
Figure 3 depicts, starting from 8 initial points, the quaternion components of the state trajectories of and .
Figure 3.
The quaternion components of the state trajectories of and in Example 3. Eight initial points are considered, which are depicted with different colors.
Example 4.
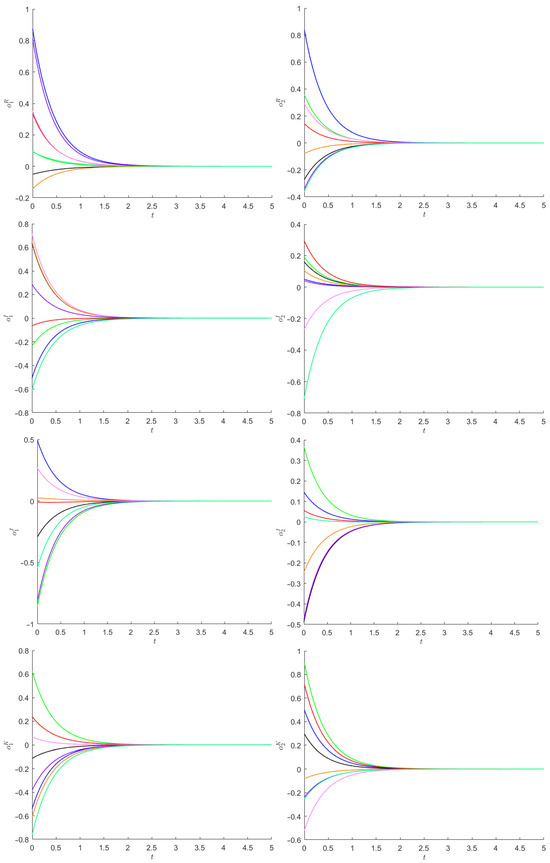
Lastly, time-scale will be taken, and the same Systems (34) and (36), and the same controller (38), but with the following parameters:
which allows us to ascertain that
Also, we take , , , , thus and .
We design the control gain matrices as
Also, we compute , , , , , , which satisfy , , and and take , . All the conditions of Theorem 4 are satisfied, from which we can conclude that System (34) is exponentially synchronized with System (36) under controller (38), with the above-defined parameters.
Figure 4 depicts, starting from 8 initial points, the quaternion components of the state trajectories of and .
Figure 4.
The quaternion components of the state trajectories of and in Example 4. Eight initial points are considered, which are depicted with different colors.
5. Conclusions
The present study was dedicated to putting forward a very generic QVNN model defined on time scales and having multiple types of delays (leakage, time-varying, distributed, and neutral), which was rarely, if ever, discussed before in the literature. The highlight of the contribution is a generalization of the Halanay-type inequality for neutral systems defined on time scales, which can be applied to any such systems, not just NNs. This proved lemma was then used in four theorems to ascertain sufficient criteria presented in terms of both LMIs and algebraic inequalities, which ensure the exponential stability and exponential synchronization properties for the proposed generic model. One numerical application illustrated each of the theorems for both the CT and DT cases.
The results obtained in this paper can be particularized for both CT and DT NNs, or any hybrid combination of the two, and for real-valued or complex-valued NNs with possibly fewer types of delays, which have not yet been discussed in the literature. Also, the proposed lemma can be applied to study different dynamical properties (like multistability, multiperiodicity, dissipativity, or passivity, for example) of other neutral systems defined on time scales, possible examples being NNs having impulsive effects, Markovian jumping parameters, or reaction–diffusion terms, other types of delays (unbounded delays), or different types of uncertainties, such as stochastic terms. The lemma could also be adapted to fractional-order NNs. These could all be interesting directions for future research.
Funding
This research was funded by a Grant of the Ministry of Research, Innovation and Digitization, CNCS—UEFISCDI, project number PN-III-P1-1.1-PD-2021-0345, within PNCDI III.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Acknowledgments
The authors extend their appreciation to a grant of the Ministry of Research, Innovation and Digitization, CNCS—UEFISCDI, project number PN-III-P1-1.1-PD-2021-0345, within PNCDI III.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Arena, P.; Fortuna, L.; Occhipinti, L.; Xibilia, M. Neural networks for quaternion-valued function approximation. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), London, UK, 30 May–2 June 1994. [Google Scholar] [CrossRef]
- Parcollet, T.; Morchid, M.; Linarès, G. A survey of quaternion neural networks. Artif. Intell. Rev. 2019, 53, 2957–2982. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, D.; Lu, J.; Cao, J. Global μ-stability criteria for quaternion-valued neural networks with unbounded time-varying delays. Inf. Sci. 2016, 360, 273–288. [Google Scholar] [CrossRef]
- You, X.; Dian, S.; Guo, R.; Li, S. Exponential stability analysis for discrete-time quaternion-valued neural networks with leakage delay and discrete time-varying delays. Neurocomputing 2021, 430, 71–81. [Google Scholar] [CrossRef]
- Zhou, J.; Tan, Y.; Chen, X.; Liu, Z. Robust stability analysis of impulsive quaternion-valued neural networks with distributed delays and parameter uncertainties. Adv. Differ. Equ. 2021, 2021, 12. [Google Scholar] [CrossRef]
- Wan, P.; Zeng, Z. Global Exponential Stability of Impulsive Delayed Neural Networks on Time Scales Based on Convex Combination Method. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 3015–3024. [Google Scholar] [CrossRef]
- Sriraman, R.; Vignesh, P.; Amritha, V.C.; Rachakit, G.; Balaji, P. Direct quaternion method-based stability criteria for quaternion-valued Takagi-Sugeno fuzzy BAM delayed neural networks using quaternion-valued Wirtinger-based integral inequality. AIMS Math. 2023, 8, 10486–10512. [Google Scholar] [CrossRef]
- Xu, X.; Yang, J.; Yang, H.; Sun, S. Effect of Impulses on Robust Exponential Stability of Delayed Quaternion-Valued Neural Networks. Neural Process. Lett. 2023, 55, 9615–9634. [Google Scholar] [CrossRef]
- Xia, Y.; Chen, X.; Lin, D.; Li, B.; Yang, X. Global Exponential Stability Analysis of Commutative Quaternion-Valued Neural Networks with Time Delays on Time Scales. Neural Process. Lett. 2023, 55, 6339–6360. [Google Scholar] [CrossRef]
- Zhu, L.; Cong, E.y.; Zhang, X. Global exponential stability conditions for quaternion-valued neural networks with leakage, transmission and distribution delays. AIMS Math. 2023, 8, 19018–19038. [Google Scholar] [CrossRef]
- Sriraman, R.; Samidurai, R.; Amritha, V.C.; Rachakit, G.; Balaji, P. System decomposition-based stability criteria for Takagi-Sugeno fuzzy uncertain stochastic delayed neural networks in quaternion field. AIMS Math. 2023, 8, 11589–11616. [Google Scholar] [CrossRef]
- Li, Y.; Ruan, C.; Li, B. Existence and Finite-Time Stability of Besicovitch Almost Periodic Solutions of Fractional-Order Quaternion-Valued Neural Networks with Time-Varying Delays. Neural Process. Lett. 2022, 54, 2127–2141. [Google Scholar] [CrossRef]
- Li, C.; Cao, J.; Kashkynbayev, A. Global finite-time stability of delayed quaternion-valued neural networks based on a class of extended Lyapunov–Razumikhin methods. Cogn. Neurodynamics 2022, 17, 729–739. [Google Scholar] [CrossRef]
- Babu, N.R.; Balasubramaniam, P. Master-slave synchronization of a new fractal-fractional order quaternion-valued neural networks with time-varying delays. Chaos Solitons Fractals 2022, 162, 112478. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Xue, Y. Global exponential synchronization of high-order quaternion Hopfield neural networks with unbounded distributed delays and time-varying discrete delays. Math. Comput. Simul. 2022, 193, 173–189. [Google Scholar] [CrossRef]
- Gao, J.; Dai, L. Anti-periodic synchronization of quaternion-valued high-order Hopfield neural networks with delays. AIMS Math. 2022, 7, 14051–14075. [Google Scholar] [CrossRef]
- Zhang, T.; Jian, J. Exponential synchronization for second-order switched quaternion-valued neural networks with neutral-type and mixed time-varying delays. Nonlinear Anal. Model. Control. 2022, 27, 700–718. [Google Scholar] [CrossRef]
- Xiong, K.; Hu, C.; Yu, J. Direct approach-based synchronization of fully quaternion-valued neural networks with inertial term and time-varying delay. Chaos Solitons Fractals 2023, 172, 113556. [Google Scholar] [CrossRef]
- Zhao, M.; Li, H.L.; Zhang, L.; Hu, C.; Jiang, H. Quasi-synchronization of discrete-time fractional-order quaternion-valued memristive neural networks with time delays and uncertain parameters. Appl. Math. Comput. 2023, 453, 128095. [Google Scholar] [CrossRef]
- Cheng, Y.; Shi, Y. The Exponential Synchronization and Asymptotic Synchronization of Quaternion-Valued Memristor-Based Cohen–Grossberg Neural Networks with Time-Varying Delays. Neural Process. Lett. 2023, 55, 6637–6656. [Google Scholar] [CrossRef]
- Xiang, J.; Tan, M. Fixed-Time Synchronization for Delayed Quaternion-Valued Stochastic Fuzzy Neural Network with Reaction–Diffusion Terms. Neural Process. Lett. 2022, 54, 5483–5523. [Google Scholar] [CrossRef]
- Yan, H.; Qiao, Y.; Duan, L.; Miao, J. New inequalities to finite-time synchronization analysis of delayed fractional-order quaternion-valued neural networks. Neural Comput. Appl. 2022, 34, 9919–9930. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, X.; Li, Y.; Gan, Q.; Wang, C. Synchronization in fixed/preassigned-time of delayed fully quaternion-valued memristive neural networks via non-separation method. Commun. Nonlinear Sci. Numer. Simul. 2022, 113, 106581. [Google Scholar] [CrossRef]
- Shang, W.; Zhang, W.; Zhang, H.; Zhang, H.; Cao, J.; Alsaadi, F.E. Finite-time lag projective synchronization of delayed fractional-order quaternion-valued neural networks with parameter uncertainties. Nonlinear Anal. Model. Control. 2023, 28, 1–22. [Google Scholar] [CrossRef]
- Wei, W.; Hu, C.; Yu, J.; Jiang, H. Fixed/Preassigned-Time Synchronization of Quaternion-Valued Neural Networks Involving Delays and Discontinuous Activations: A Direct Approach. Acta Math. Sci. 2023, 43, 1439–1461. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, L.; Kou, K.I.; Liu, Y. Fixed-time synchronization for quaternion-valued memristor-based neural networks with mixed delays. Neural Netw. 2023, 165, 274–289. [Google Scholar] [CrossRef] [PubMed]
- Zeng, H.-B.; Zhu, Z.-J.; Xiao, S.-P.; Zhang, X.-M. A Switched System Model for Exponential Stability and Dissipativity of Delayed Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2025, 36, 19708–19717. [Google Scholar] [CrossRef]
- Aouiti, C.; Gharbia, I.B.; Cao, J.; M’hamdi, M.S.; Alsaedi, A. Existence and global exponential stability of pseudo almost periodic solution for neutral delay BAM neural networks with time-varying delay in leakage terms. Chaos Solitons Fractals 2018, 107, 111–127. [Google Scholar] [CrossRef]
- Li, Y.; Meng, X. Almost Automorphic Solutions for Quaternion-Valued Hopfield Neural Networks with Mixed Time-Varying Delays and Leakage Delays. J. Syst. Sci. Complex. 2019, 33, 100–121. [Google Scholar] [CrossRef]
- Shu, H.; Song, Q.; Liang, J.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Global exponential stability in Lagrange sense for quaternion-valued neural networks with leakage delay and mixed time-varying delays. Int. J. Syst. Sci. 2019, 50, 858–870. [Google Scholar] [CrossRef]
- Li, Y.; Xiang, J.; Li, B. Almost periodic solutions of quaternion-valued neutral type high-order Hopfield neural networks with state-dependent delays and leakage delays. Appl. Intell. 2020, 50, 2067–2078. [Google Scholar] [CrossRef]
- Li, H.L.; Jiang, H.; Cao, J. Global synchronization of fractional-order quaternion-valued neural networks with leakage and discrete delays. Neurocomputing 2020, 385, 211–219. [Google Scholar] [CrossRef]
- Liu, L.; Chen, X. State Estimation of Quaternion-Valued Neural Networks with Leakage Time Delay and Mixed Two Additive Time-Varying Delays. Neural Process. Lett. 2020, 51, 2155–2178. [Google Scholar] [CrossRef]
- Li, B.; Tang, B. New Stability Criterion for Fractional-Order Quaternion-Valued Neural Networks Involving Discrete and Leakage Delays. J. Math. 2021, 2021, 1–20. [Google Scholar] [CrossRef]
- Meng, X.; Li, Y. Pseudo almost periodic solutions for quaternion-valued high-order Hopfield neural networks with time-varying delays and leakage delays on time scales. AIMS Math. 2021, 6, 10070–10091. [Google Scholar] [CrossRef]
- Wang, P.; Li, X.; Wang, N.; Li, Y.; Shi, K.; Lu, J. Almost periodic synchronization of quaternion-valued fuzzy cellular neural networks with leakage delays. Fuzzy Sets Syst. 2022, 426, 46–65. [Google Scholar] [CrossRef]
- Xu, C.; Liu, Z.; Aouiti, C.; Li, P.; Yao, L.; Yan, J. New exploration on bifurcation for fractional-order quaternion-valued neural networks involving leakage delays. Cogn. Neurodyn. 2022, 16, 1233–1248. [Google Scholar] [CrossRef]
- Huo, N.; Li, Y. Antiperiodic Solutions for Quaternion-Valued Shunting Inhibitory Cellular Neural Networks with Distributed Delays and Impulses. Complexity 2018, 2018, 6420256. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Meng, X. Almost automorphic synchronization of quaternion-valued high-order Hopfield neural networks with time-varying and distributed delays. IMA J. Math. Control. Inf. 2018, 36, 983–1013. [Google Scholar] [CrossRef]
- Tu, Z.; Zhao, Y.; Ding, N.; Feng, Y.; Zhang, W. Stability analysis of quaternion-valued neural networks with both discrete and distributed delays. Appl. Math. Comput. 2019, 343, 342–353. [Google Scholar] [CrossRef]
- Xiang, J.; Li, Y. Pseudo almost automorphic solutions of quaternion-valued neural networks with infinitely distributed delays via a non-decomposing method. Adv. Differ. Equ. 2019, 2019, 356. [Google Scholar] [CrossRef]
- Duan, H.; Peng, T.; Tu, Z.; Qiu, J.; Lu, J. Globally Exponential Stability and Globally Power Stability of Quaternion-Valued Neural Networks With Discrete and Distributed Delays. IEEE Access 2020, 8, 46837–46850. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, H.; Zhang, H.; Zhang, W. Globally projective synchronization for Caputo fractional quaternion-valued neural networks with discrete and distributed delays. AIMS Math. 2021, 6, 14000–14012. [Google Scholar] [CrossRef]
- Wan, P.; Zeng, Z. Lagrange Stability of Fuzzy Memristive Neural Networks on Time Scales With Discrete Time Varying and Infinite Distributed Delays. IEEE Trans. Fuzzy Syst. 2022, 30, 3138–3151. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H. Almost periodic synchronization of quaternion-valued shunting inhibitory cellular neural networks with mixed delays via state-feedback control. PLoS ONE 2018, 13, e0198297. [Google Scholar] [CrossRef]
- Popa, C.A.; Kaslik, E. Multistability and multiperiodicity in impulsive hybrid quaternion-valued neural networks with mixed delays. Neural Netw. 2018, 99, 1–18. [Google Scholar] [CrossRef]
- You, X.; Song, Q.; Liang, J.; Liu, Y.; Alsaadi, F.E. Global μ-stability of quaternion-valued neural networks with mixed time-varying delays. Neurocomputing 2018, 290, 12–25. [Google Scholar] [CrossRef]
- Li, Y.; Meng, X. Almost Automorphic Solutions in Distribution Sense of Quaternion-Valued Stochastic Recurrent Neural Networks with Mixed Time-Varying Delays. Neural Process. Lett. 2019, 51, 1353–1377. [Google Scholar] [CrossRef]
- Chérif, F.; Abdelaziz, M. Stepanov-Like Pseudo Almost Periodic Solution of Quaternion-Valued for Fuzzy Recurrent Neural Networks with Mixed Delays. Neural Process. Lett. 2020, 51, 2211–2243. [Google Scholar] [CrossRef]
- Wang, H.; Tan, J.; Wen, S. Exponential Stability Analysis of Mixed Delayed Quaternion-Valued Neural Networks Via Decomposed Approach. IEEE Access 2020, 8, 91501–91509. [Google Scholar] [CrossRef]
- Xu, X.; Xu, Q.; Yang, J.; Xue, H.; Xu, Y. Further research on exponential stability for quaternion-valued neural networks with mixed delays. Neurocomputing 2020, 400, 186–205. [Google Scholar] [CrossRef]
- Jiang, Q.; Wang, Q.R. Almost periodic solutions for quaternion-valued neural networks with mixed delays on time scales. Neurocomputing 2021, 439, 363–373. [Google Scholar] [CrossRef]
- Li, S.; Wang, X.-m.; Qin, H.-y.; Zhong, S.-m. Synchronization criteria for neutral-type quaternion-valued neural networks with mixed delays. AIMS Math. 2021, 6, 8044–8063. [Google Scholar] [CrossRef]
- Pan, J.; Pan, Z. Novel robust stability criteria for uncertain parameter quaternionic neural networks with mixed delays: Whole quaternionic method. Appl. Math. Comput. 2021, 407, 126326. [Google Scholar] [CrossRef]
- Singh, S.; Kumar, U.; Das, S.; Alsaadi, F.; Cao, J. Synchronization of Quaternion Valued Neural Networks with Mixed Time Delays Using Lyapunov Function Method. Neural Process. Lett. 2021, 54, 785–801. [Google Scholar] [CrossRef]
- Peng, T.; Qiu, J.; Lu, J.; Tu, Z.; Cao, J. Finite-Time and Fixed-Time Synchronization of Quaternion-Valued Neural Networks With/Without Mixed Delays: An Improved One-Norm Method. IEEE Trans. Syst. Man Cybern. Syst. 2022, 33, 7475–7487. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Meng, X. Almost periodic solutions for quaternion-valued shunting inhibitory cellular neural networks of neutral type with time delays in the leakage term. Int. J. Syst. Sci. 2018, 49, 2490–2505. [Google Scholar] [CrossRef]
- Pahnehkolaei, S.M.A.; Alfi, A.; Machado, J.T. Delay-dependent stability analysis of the QUAD vector field fractional order quaternion-valued memristive uncertain neutral type leaky integrator echo state neural networks. Neural Netw. 2019, 117, 307–327. [Google Scholar] [CrossRef]
- Shu, J.; Xiong, L.; Wu, T.; Liu, Z. Stability Analysis of Quaternion-Valued Neutral-Type Neural Networks with Time-Varying Delay. Mathematics 2019, 7, 101. [Google Scholar] [CrossRef]
- Song, Q.; Long, L.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Stability criteria of quaternion-valued neutral-type delayed neural networks. Neurocomputing 2020, 412, 287–294. [Google Scholar] [CrossRef]
- Song, Q.; Chen, Y.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Robust stability of fractional-order quaternion-valued neural networks with neutral delays and parameter uncertainties. Neurocomputing 2021, 420, 70–81. [Google Scholar] [CrossRef]
- Song, Q.; Chen, S.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Passive filter design for fractional-order quaternion-valued neural networks with neutral delays and external disturbance. Neural Netw. 2021, 137, 18–30. [Google Scholar] [CrossRef]
- Song, Q.; Zeng, R.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Mean-square stability of stochastic quaternion-valued neural networks with variable coefficients and neutral delays. Neurocomputing 2022, 471, 130–138. [Google Scholar] [CrossRef]
- Mohamad, S.; Gopalsamy, K. Dynamics of a class of discrete-time neural networks and their continuous-time counterparts. Math. Comput. Simul. 2000, 53, 1–39. [Google Scholar] [CrossRef]
- Hu, J.; Zeng, C.; Tan, J. Boundedness and periodicity for linear threshold discrete-time quaternion-valued neural network with time-delays. Neurocomputing 2017, 267, 417–425. [Google Scholar] [CrossRef]
- Li, L.; Chen, W. Exponential stability analysis of quaternion-valued neural networks with proportional delays and linear threshold neurons: Continuous-time and discrete-time cases. Neurocomputing 2020, 381, 152–166. [Google Scholar] [CrossRef]
- Sriraman, R.; Rajchakit, G.; Lim, C.P.; Chanthorn, P.; Samidurai, R. Discrete-Time Stochastic Quaternion-Valued Neural Networks with Time Delays: An Asymptotic Stability Analysis. Symmetry 2020, 12, 936. [Google Scholar] [CrossRef]
- Tan, Y.; Wang, X.; Yang, J.; Hu, J. Robust Exponential Stability for Discrete-Time Quaternion-Valued Neural Networks with Time Delays and Parameter Uncertainties. Neural Process. Lett. 2020, 51, 2317–2335. [Google Scholar] [CrossRef]
- Chen, S.; Li, H.L.; Bao, H.; Zhang, L.; Jiang, H.; Li, Z. Global Mittag–Leffler stability and synchronization of discrete-time fractional-order delayed quaternion-valued neural networks. Neurocomputing 2022, 511, 290–298. [Google Scholar] [CrossRef]
- Hilger, S. Analysis on Measure Chains — A Unified Approach to Continuous and Discrete Calculus. Results Math. 1990, 18, 18–56. [Google Scholar] [CrossRef]
- Bohner, M.; Peterson, A. Dyn. Equ. Time Scales; Birkhauser: Boston, MA, USA, 2001. [Google Scholar] [CrossRef]
- Martynyuk, A.A. Stability Theory for Dynamic Equations on Time Scales; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Adıvar, M.; Raffoul, Y.N. Stability, Periodicity and Boundedness in Functional Dynamical Systems on Time Scales; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Chen, A.; Du, D. Global exponential stability of delayed BAM network on time scale. Neurocomputing 2008, 71, 3582–3588. [Google Scholar] [CrossRef]
- Shen, S.; Li, B.; Li, Y. Anti-Periodic Dynamics of Quaternion-Valued Fuzzy Cellular Neural Networks with Time-Varying Delays on Time Scales. Discret. Dyn. Nat. Soc. 2018, 2018, 5290786. [Google Scholar] [CrossRef]
- Li, Y.; Shen, S. Almost automorphic solution of quaternion-valued BAM neural networks with time-varying delays on time scales1. J. Intell. Fuzzy Syst. 2019, 37, 669–685. [Google Scholar] [CrossRef]
- Mohamad, S.; Gopalsamy, K. Continuous and discrete Halanay-type inequalities. Bull. Aust. Math. Soc. 2000, 61, 371–385. [Google Scholar] [CrossRef]
- Wen, L.; Yu, Y.; Wang, W. Generalized Halanay inequalities for dissipativity of Volterra functional differential equations. J. Math. Anal. Appl. 2008, 347, 169–178. [Google Scholar] [CrossRef]
- Wang, W. A Generalized Halanay Inequality for Stability of Nonlinear Neutral Functional Differential Equations. J. Inequalities Appl. 2010, 2010, 475019. [Google Scholar] [CrossRef]
- Wen, H.; Shu, S.; Wen, L. A new generalization of Halanay-type inequality and its applications. J. Inequalities Appl. 2018, 2018, 300. [Google Scholar] [CrossRef]
- Kassim, M.D.; Tatar, N. A neutral fractional Halanay inequality and application to a Cohen–Grossberg neural network system. Math. Methods Appl. Sci. 2021, 44, 10460–10476. [Google Scholar] [CrossRef]
- Adıvar, M.; Bohner, E.A. Halanay type inequalities on time scales with applications. Nonlinear Anal. Theory Methods Appl. 2011, 74, 7519–7531. [Google Scholar] [CrossRef][Green Version]
- Ou, B.; Jia, B.; Erbe, L. An extended Halanay inequality of integral type on time scales. Electron. J. Qual. Theory Differ. Equ. 2015, 38, 1–11. [Google Scholar] [CrossRef]
- Ou, B.; Lin, Q.; Du, F.; Jia, B. An extended Halanay inequality with unbounded coefficient functions on time scales. J. Inequalities Appl. 2016, 2016, 316. [Google Scholar] [CrossRef]
- Ou, B. Halanay Inequality on Time Scales with Unbounded Coefficients and Its Applications. Indian J. Pure Appl. Math. 2020, 51, 1023–1038. [Google Scholar] [CrossRef]
- Xiao, Q.; Zeng, Z. Scale-Limited Lagrange Stability and Finite-Time Synchronization for Memristive Recurrent Neural Networks on Time Scales. IEEE Trans. Cybern. 2017, 47, 2984–2994. [Google Scholar] [CrossRef]
- Xiao, Q.; Zeng, Z. Lagrange Stability for T–S Fuzzy Memristive Neural Networks with Time-Varying Delays on Time Scales. IEEE Trans. Fuzzy Syst. 2018, 26, 1091–1103. [Google Scholar] [CrossRef]
- Xiao, Q.; Huang, T.; Zeng, Z. Passivity and Passification of Fuzzy Memristive Inertial Neural Networks on Time Scales. IEEE Trans. Fuzzy Syst. 2018, 26, 3342–3355. [Google Scholar] [CrossRef]
- Xiao, Q.; Huang, T.; Zeng, Z. Stabilization of Nonautonomous Recurrent Neural Networks With Bounded and Unbounded Delays on Time Scales. IEEE Trans. Cybern. 2020, 50, 4307–4317. [Google Scholar] [CrossRef] [PubMed]
- Wan, P.; Zeng, Z. Quasisynchronization of Delayed Neural Networks With Discontinuous Activation Functions on Time Scales via Event-Triggered Control. IEEE Trans. Cybern. 2021, 53, 44–54. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.