Abstract
For the generalized Sturm–Liouville problem (GSLP), a new formulation is undertaken to reduce the number of unknowns from two to one in the target equation for the determination of eigenvalue. The eigenparameter-dependent shape functions are derived for using in a variable transformation, such that the GSLP becomes an initial value problem for a new variable. For the uniqueness of eigenfunction an extra condition is imposed, which renders the right-end value of the new variable available; a derived implicit nonlinear equation is solved by an iterative method without using the differential; we can achieve highly precise eigenvalues. For the nonlocal Sturm–Liouville problem (NSLP), we consider two types of integral boundary conditions on the right end. For the first type of NSLP we can prove sufficient conditions for the positiveness of the eigenvalue. Negative eigenvalues and multiple solutions may exist for the second type of NSLP. We propose a boundary shape function method, a two-dimensional fixed-quasi-Newton method and a combination of them to solve the NSLP with fast convergence and high accuracy. From the aspect of numerical analysis the initial value problem of ordinary differential equations and scalar nonlinear equations are more easily treated than the original GSLP and NSLP, which is the main novelty of the paper to provide the mathematically equivalent and simpler mediums to determine the eigenvalues and eigenfunctions.
Keywords:
generalized Sturm–Liouville problem; λ-dependent boundary conditions; boundary shape functions; nonlocal Sturm–Liouville problem; fixed-quasi-Newton method MSC:
34B24; 34B15; 34B08; 34B10; 34L10
1. Introduction
The Sturm–Liouville problems and their generalizations are important issues in computational mathematics. Let us consider a generalized Sturm–Liouville problem (GSLP):
We seek and by giving , , , and , where . and are, respectively, the left and right linear boundary operators, depending on .
When and constant , , and are given in Equations (1)–(3), we recover to the Sturm–Liouville problem (SLP). It is known that solving the GSLP is more difficult than solving the SLP. Therefore, it is important that for the GSLP one can develop efficient methods [1,2,3,4,5,6,7,8,9].
As a special case of Equations (1)–(3), Aliyev and Kerimov [1] studied the following spectral problem:
where , b, c and are real constants. In terms of a target function
and root functions system, the authors proved that for the basisness in , the part of the root space is quadratically close to systems of sines and cosines. In general, the target function is different from the characteristic function, which is usually not attainable in the closed form. The above work was extended in [10] to a boundary condition linearly dependent on the eigenparameter. In this paper, we also set the target equation as a mathematical tool to determine the eigenvalues. However, we emphasize the numerical aspect of the spectral problem of Equations (1)–(3), which is not addressed in [1].
Currently, the Sturm–Liouville problems with eigenparameter-dependent boundary conditions and transmission conditions are also important issues in many studies [11,12]. Recently, many engineering issues and mathematical schemes have been presented resolving the GSLPs, e.g., an analytical method to acquire the sharp estimates for the lowest positive periodic eigenvalue and all Dirichlet eigenvalues of a GSLP [13]; a class of generalized discontinuous GSLPs with boundary conditions rationally dependent on the eigenparameter was solved by using operator theoretic formulation under the new inner product [14]; the GSLP had infinite eigenvalues and corresponding eigenfunctions existed such that the sequence of eigenvalues was increasing as shown in [15]; a thorough formulation of the weighted residual collocation method was based on the Bernstein polynomials for a class of Sturm–Liouville boundary value problems [16]; the infinitely dimensional minimization problem of the lowest positive Neumann eigenvalue for the SLP [17], and an optimal design of a structure was described by a GSLP with a spectral parameter in the boundary conditions [18].
The integral type nonlocal boundary conditions (BCs) are an area of the fast-developing differential equations theory, which may rise up when the solution on the boundary is connected with the values inside the domain. There are some works on the forced Duffing equation with integral boundary conditions [19,20,21,22], which are effective methods for solving the boundary value problem (BVP) with linear integral BCs [22,23,24].
As defined in [25], the boundary shape function (BSF) automatically satisfies the BCs, which includes the solution of BVP as a special member since the solution must exactly satisfy the specified BCs. The boundary shape function method (BSFM) has been adopted to solve some BVPs [25] with conventional local BCs. Recently, Liu [26] provided a unified BSFM to resolve the eigenvalue problems of SLP, GSLP and periodic SLP. However, the method based on the BSF is not yet developed for solving the NSLP endowed with nonlocal BCs. The SLP with nonlocal BCs has been investigated in [27,28,29,30,31], and has been surveyed in [32]. Those papers were mainly focused on theoretical analyses, and the numerical algorithm to solve the NSLP is not addressed.
Sequentially, we construct two -dependent shape functions and a variable transformation for the GSLP in Section 2. In Section 3, an initial value problem for a new variable with the aid of the normalization technique is derived. To match the right-end BC an implicit nonlinear equation is derived to obtain the eigenvalues by an iterative scheme. Five testing examples are revealed in Section 4. In Section 5, we discuss the first type NSLP to prove , and develop the boundary shape function method (BSFM) for a new variable to iteratively solve the eigenvalue, wherein two examples are given. In Section 6, the second type of NSLP is studied and solved iteratively by the BSFM for a new variable. Two examples are given to display the multiple solutions. To obtain the eigenvalue precisely, we develop a two-dimensional fixed-quasi-Newton method (FQNM) in Section 7 for solving the first type NSLP in the original variable, and the second type NSLP in the new variable. The conclusions are drawn in Section 8.
2. Boundary Shape Function
We explore a novel method in [33] for solving a nonlinear equation, which is combined to the boundary shape function method [25] to solve Equations (1)–(3). For this purpose we need to develop a new mathematical method for transforming Equations (1)–(3) to an initial value problem with a new idea of the eigenparameter-dependent boundary shape function.
Let and be shape functions of x and :
If , we can derive
Theorem 1.
For any , if and satisfy Equations (8) and (9), then the function , given by
automatically satisfies the boundary conditions (2) and (3), where is given by
Proof.
An eigenparameter-dependent boundary shape function is such a function that it satisfies the eigenparameter-dependent boundary conditions in Equations (2) and (3), automatically. Theorem 1 is crucial that the eigenparameter-dependent boundary shape function can be constructed from Equations (11) and (12) easily, with the help of two shape functions and and a new function .
3. An Implicit Nonlinear Equation
3.1. A Definite Initial Value Problem
One drawback in Equation (11) is that the right-end values of and in appeared in the translation function are themselves unknown values. In this situation the variable transformation in Equation (11) is hard to work in the present form, since there are three unknown values , and in to be determined; and in are some given initial values. We can improve this drawback by considering one extra condition in the following two normalization conditions:
where and are the given nonzero constants. Hence, is unique. If the condition is given, we need to specify the value of , say ; in contrast, if the condition is given, we need to specify the value of , say . If in Equation (2), we can adopt or as a normalization condition. In general, we take or .
Theorem 2.
Proof.
Theorem 2 is interesting that by using the normalization condition the translation function can be reduced to a function that merely involves as an unknown value. The reduction from three unknown values , and to one unknown value is a key point for the success of the iterative algorithm to be presented in Section 3.2.
Theorem 3.
If and Equation (13) is adopted, then Equations (1)–(3) can be transformed to
where the new variable is subjected to
If and Equation (14) is imposed, then Equations (1)–(3) can be transformed to
which is subjected to
For Equation (21) or Equation (23), and are the specified initial conditions with and given constants.
Proof.
Although the proof of Theorem 3 is straightforward, it is very important that we can fully transform Equations (1)–(3) to an initial value problem of the second-order ordinary differential equation (ODE) for the new variable , and a nonlinear equation as the target equation to determine the eigenvalue .
3.2. An Iterative Algorithm
Liu et al. [33] proposed an iterative scheme (LHL) to find the root of :
where
with and . Equation (25) has third-order convergence.
Choose and with to render . Then, we take and approximate a and b in Equation (26) by using the finite differences:
The procedures for solving are given as follows: (i) Take and such that . (ii) Obtain a and b by Equation (27). (iii) For , iterate
until .
The idea to solve Equations (1)–(3) is now simplifying to the shooting method to solve Equations (21) and (22) or Equations (23) and (24). For each given value of and the given initial values and , we can integrate Equation (21) by employing the fourth-order Runge–Kutta method (RK4). At the endpoint of the integration, we can obtain and which are implicit functions of . Inserting and into the target Equation (22), an implicit nonlinear equation denoted by is obtained as follows:
Similarly, for each given value of , we can integrate Equation (23) with the given initial values and to obtain and ; hence, Equation (24) yields the following implicit nonlinear target equation:
Equation (29) or Equation (30) is an implicit nonlinear equation of , which can be solved by the LHL in Equation (28).
In the GSLP of Equations (1)–(3) there are two unknowns of and (or ). Equations (21)–(24) overcome this difficulty by reducing two unknowns to one unknown for in Equations (21) and (22) or Equations (23) and (24).
No matter the cases in Equations (21) and (22), or in Equations (23) and (24), we unify them to
where is an implicit function of through and .
The iterative processes for solving Equations (1)–(3) to determine the eigenvalue are given as follows: (i) Give , , , , , , , , , and initial guess . (ii) Give , , ; compute Equation (31) by RK4 to obtain and , and obtain ; compute Equation (31) by RK4 to obtain and , and obtain ; compute Equation (31) by RK4 to obtain and , and obtain ; compute
(iii) Conduct ,
until .
Because we have mathematically transformed the spectral problem of GSLP to the problem for solving a target equation, the convergence is guaranteed by the LHL with three-order convergence. It is known that the RK4 has fourth-order accuracy which together with the LHL, can achieve highly accurate eigenvalue and the corresponding eigenfunction.
4. Examples Testing
4.1. Example 1
Consider a generalized Sturm–Liouville problem in [1]:
For this problem we solve from the following characteristic equation in [1]:
which is the explicit form of the characteristic equation and we solve it by using the Newton method. Here is the eigenfunction.
As shown in [1], the target equation is
which can be arranged to Equation (35). For this spectral problem, the target equation is equal to the characteristic equation.
We set , , and determine by Equation (29). Table 1 reveals fast convergence with high accuracy for the eigenvalues obtained. NI denotes the number of iterations, the absolute error AE of eigenvalue, ERBC the absolute error of the right boundary condition, and ME the maximum error of eigenfunction.

Table 1.
For example 1, tabulating , , NI, AE, ERBC, and ME.
4.2. Example 2
Consider a generalized Sturm–Liouville problem specified in [2,3]:
The characteristic equation is derived in [3]:
No closed-form eigenfunction exists for this spectral problem. We take , 10,000, and , and iteratively determine by Equation (30) as shown in Table 2.
Table 2.
Tabulating , , NI, AE, and ERBC for example 2.
4.3. Example 3
Taken from [3], we consider the following generalized Sturm–Liouville problem:
For this spectral problem we have
It follows from Equation (10) that
Then, in view of Equations (17) and (18), one has
From Equations (23) and (24) the second-order ordinary differential equation and nonlinear equation are given by
where
Now, the iterative method listed Section 3.2 can be applied to compute the eigenvalues of Equations (39) and (40).
We take , , and and iteratively determine by Equation (46) as shown in Table 3, where the exact eigenvalues are given by [3].
Table 3.
Tabulating computed and exact , , NI, and ERBC for example 3.
4.4. Example 4
Consider a generalized Sturm–Liouville problem in [3]:
whose characteristic equation reads as
Table 4.
For example 4 tabulating , , NI, AE, and ERBC.
4.5. Example 5
We compute the eigenvalues of the following generalized Sturm–Liouville problem:
whose eigenvalues are the same as those in Example 2.
We set , 10,000, and and determine by Equation (29). As shown in Table 5, the accuracy in the right boundary condition is slightly better than that in Table 2.
Table 5.
Tabulating , , NI, AE, and ERBC for example 5.
5. First Type Nonlocal Sturm–Liouville Problem
In this section we consider a nonlocal Sturm–Liouville problem (NSLP) [34,35]:
where is a nonlocal potential. To distinguish the NSLP from the GSLP in Equations (1)–(3), we adopt a different notation for the eigenfunction, instead of .
In terms of a nonlocal linear boundary operator:
Equation (54) is written as
We can impose a normalization condition:
where is a given constant.
5.1. The Positiveness of
Theorem 4.
For Equation (53), the conditions in Equation (54) are sufficient for
Proof.
Equation (61) is somewhat similar to the Rayleigh quotient; however, the Rayleigh quotient in the classical Sturm–Liouville problem includes a potential function in the integral term at the numerator. Equation (61) is important for developing a highly precise iterative algorithm in Section 7, where
and the second one in Equation (54) constitute coupled nonlinear equations to determine .
5.2. Boundary Shape Function
Let and be
We can derive
where we suppose that .
Theorem 5.
For any , if and satisfy Equations (62) and (63), then the function satisfying Equation (54) is given by
where
Proof.
Inserting into Equation (65) and using and , it is apparent that
The first condition in Equation (54) is proven. Applying the linear operator to Equation (65), and using the second ones in Equations (62) and (63), we have
where is taken as that defined in Equation (55). Hence, the second condition in Equation (54) is proven. □
Theorem 5 is critical such that the nonlocal boundary conditions in Equation (54) can be automatically satisfied for with the help of two nonlocal shape functions and and a new function .
5.3. Numerical Algorithm
Let
hence, the variable transformation in Equation (65) reads as
Following Equation (53), a new second-order ODE for :
where
is derived by inserting into the differential of Equation (69) and by using Equation (57). In view of Equation (64),
according to the assumption ; hence, is a well-defined constant given in Equation (71).
In terms of , in Equation (61) is recast to
Let , , , and , which is an unknown constant. For solving Equations (53) and (54), we list the iterative algorithm based on the boundary shape function method (BSFM). (i) Give and derive and ; give , , , initial guesses of , , and N. (ii) Calculate . (iii) For , the RK4 integrates
Take
where is computed according to Equation (72). Terminate the iterations if
5.4. Example 6
In Equations (53) and (54), we take
The exact eigenvalue is .
We can derive and ; take for the sake of comparing the computed to the exact one. We take , , , , and . Figure 1a shows 77 iterations for the convergence, and upon comparing the computed to the exact one, Figure 1b reveals high accuracy with a very small maximum error (ME) = . The eigenvalue obtained is , which has an absolute error (AE) of denoted by AE. We obtain the AE for satisfying the right-end boundary condition = .
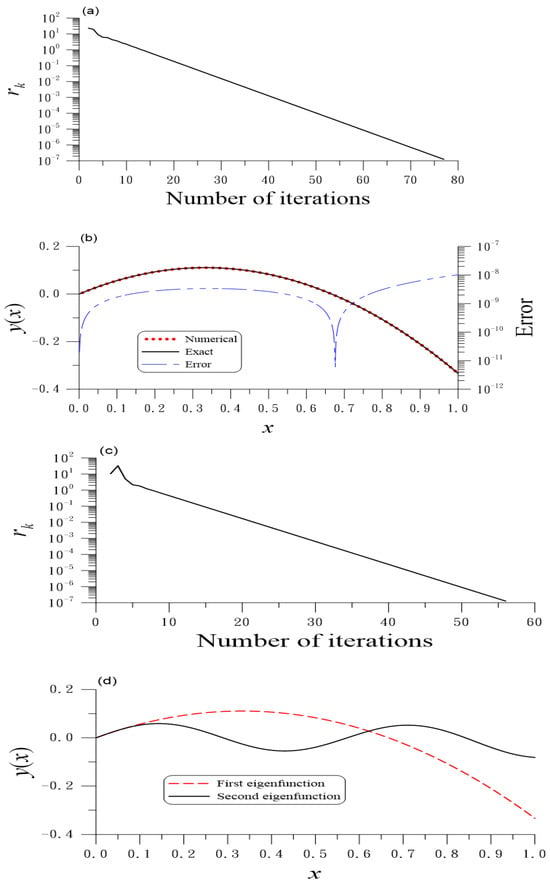
Figure 1.
For example 6 of the first type nonlocal Sturm–Liouville problem, (a) the residuals and (b) numerical and exact solutions and error for the first eigenfunction; (c) the residuals and (d) numerical solution for the second eigenfunction.
5.5. Example 7
In Equations (53) and (54), we take
The exact eigenvalue is .
We can derive , . By taking , , , , , and , Figure 2a shows six iterations for the convergence; upon comparing the computed to the exact one, Figure 2b reveals ME = . The eigenvalue obtained has a relative error of . We obtain = .
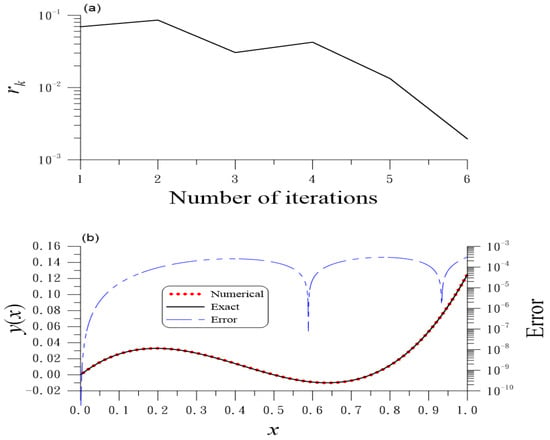
Figure 2.
For example 7 of the first type nonlocal Sturm–Liouville problem, (a) the residuals and (b) numerical and exact solutions and errors.
6. Second Type Nonlocal Sturm–Liouville Problem
Instead of Equation (54), Albeverio et al. [35] consider
Equations (53) and (78) constitute the second type nonlocal Sturm–Liouville problem (NSLP). We can derive
where we suppose that ; is computed by
For the second type NSLP we let
Liu and Qi [34] considered , ; with the boundary conditions in Equation (78), a negative eigenvalue is obtained. For the positiveness of , the inequality must hold. Through some operations for , is obtained, which contradicts the above inequality. For the second type of NSLP, the eigenvalue may be negative.
In Section 6.3 and Section 6.4 two examples will be given to demonstrate that the solution is not unique, even the conditions , and are imposed. This is different from the local Sturm–Liouville problem; the uniqueness of is guaranteed if and are imposed.
6.1. Iterative Algorithm
6.2. Infinite Solutions
We find that for the second NSLP, there may be many solutions with different ended values of the eigenfunctions. Hence, for the uniqueness of the eigenfunction of Equations (53) and (78), in addition to Equation (57), we can impose an extra condition:
where are some constants.
To resolve this problem by using the BSFM, we can set a suitable initial value of , such that the condition (84) can be satisfied. In Equation (69), we insert and use Equations (71) and (84) to obtain
where and were used. Then, we can compute by
For solving Equations (53) and (78) by the BSFM to find a particular solution with an ended value , we can modify the iterative algorithm in Section 6.1 to (i) Give and derive and ; give , , , , , and N. (ii) For , calculate
integrate Equation (73) by RK4 and take
We terminate the iterations if
6.3. Example 8
In Equations (53) and (78), we take [35]
The exact eigenvalue is a multiple one, corresponding to multiple solutions , and other.
We first consider . We can derive , and take for comparing the computed to the exact one . We take , , , , and . Figure 3a shows five iterations for the convergence; Figure 3b reveals high accuracy with ME = , AE, and .
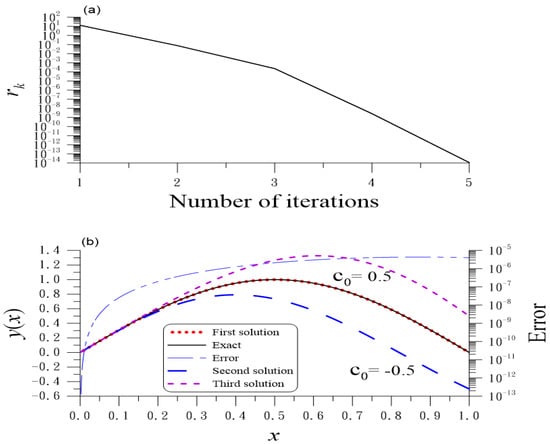
Figure 3.
For example 8 of the second type nonlocal Sturm–Liouville problem, (a) the residuals and (b) numerical and exact solutions and error.
Using the iterative algorithm in Section 6.2, we take and ; through four iterations we obtain ME = , AE and . The accuracy of the eigenfunction is raised five orders, while the accuracy of the right boundary condition is raised one order.
When we take , AE and are obtained through eleven iterations; as shown in Figure 3b remarked by , we obtain the second solution with an ended value .
When we take , AE and are obtained through twenty iterations; as shown in Figure 3b remarked by , we obtain the third solution with an ended value .
6.4. Example 9
Take for comparing the computed to the exact one . We take , , , and . Figure 4a shows 13 iterations for the convergence; Figure 4b reveals the high accuracy with ME = , AE, and .
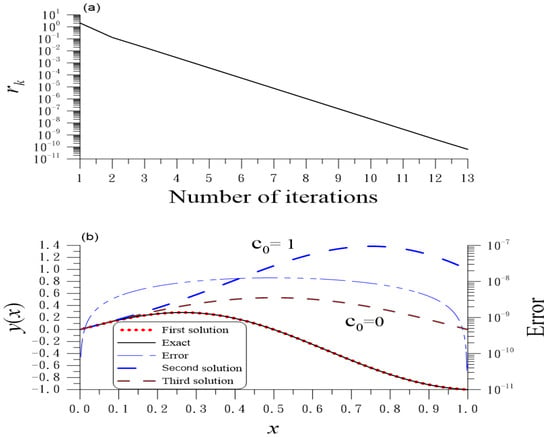
Figure 4.
For example 9 of the second type nonlocal Sturm–Liouville problem, (a) the residuals and (b) numerical and exact solutions and error.
For this example, we also find other solutions, as shown in Figure 5 by a solid line, which is different from the first solution as shown by a thin dashed line in Figure 5. Although these two solutions have the same values of and , the ended values are −1 and −0.2781268005, respectively. However, we do not have an analytic form of the second solution.
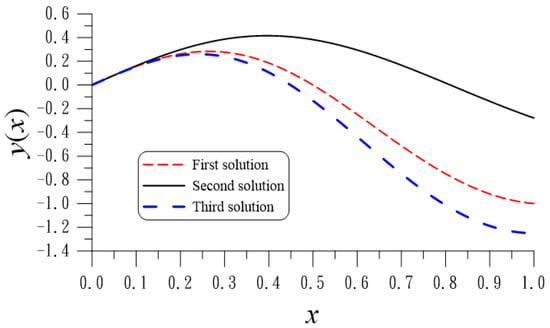
Figure 5.
For example 9 comparing three solutions with different ended values.
Using the iterative algorithm in Section 6.2, when we take , AE and are obtained through 98 iterations; as shown in Figure 4b remarked by , we obtain the second solution with an ended value .
When we take , AE and are obtained through four iterations; as shown in Figure 4b remarked by , we obtain the third solution with an ended value .
Remark 1.
There are two unconventional phenomena that happened for the second type of the nonlocal Sturm–Liouville problem. First, the eigenvalue may be negative depending on the end value of . Second, although the conditions and are imposed, the eigenfunction corresponding to the same eigenvalue is not unique, due to appeared in Equation (53).
7. Precise Eigenvalue for the Nonlocal Sturm–Liouville Problem
As shown in example 6 in Section 5.4, the number of iterations (NI) is 77, and in example 7 in Section 5.5, the relative error of eigenvalue is . Basically, the slow convergence and low accuracy originate from considering one target equation in Equation (54). When Equation (61) is also deemed another target equation, we can improve the accuracy and reduce the number of iterations. Because we need to treat two nonlinear equations, the derivative-free iterative algorithm in Section 3.2 is not applicable.
To improve NI and accuracy, we note the derivative-free iterative algorithm in Section 3.2 by taking as a one-dimensional fixed-quasi-Newton method, and extend it to a two-dimensional fixed-quasi-Newton method (FQNM). It is known that the two-dimensional Newton method (including the quasi-one) is quadratically convergent. If we can enhance the convergence criterion to a small value, we can achieve a highly accurate eigenvalue within a reasonable value of NI because both Equations (54) and (61) are accurately satisfied.
7.1. A Fixed-Quasi-Newton Method
For the first type nonlocal Sturm–Liouville problem in Section 5, it follows from Equations (54) and (61) and two nonlinear algebraic equations:
where and . Notice that is appeared in the governing Equation (53), which makes an implicit function of A; hence, and are also implicit functions of A.
As an extension of the one-dimensional FQNM in Section 3 with , we now consider the approximation of a Jacobian matrix at the root of by finite differences, which is termed a fixed-quasi-Newton method (FQNM) of two-dimensions. Choose a rectangle with the vertexes , , and around the center point to carry out the approximation of the Jacobian matrix by a constant matrix .
The iterative algorithm obtained from the two-dimensional FQNM for solving in Equations (53) and (54) is summarized as follows. (i) Give , , , , , and . (ii) Compute
(iii) Let and and for k = 0, 1, …, iterate
Let and . In each iteration, the RK4 is used to integrate
and calculate and .
7.2. Example 6 Again
We take and . Figure 6a shows 13 iterations, which converge faster than 77 iterations in Section 5.4. Figure 6b reveals a high accuracy with ME = AE, and .
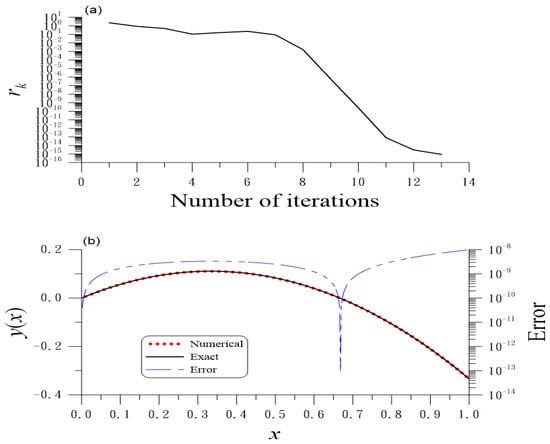
Figure 6.
For example 6 solved by the FQNM, the improvements of (a) the residuals and (b) numerical and exact solutions and error.
7.3. Example 7 Again
We take and . Figure 7a shows eight iterations for convergence. Upon comparison to Section 5.5 with six iterations under , the FQNM converges faster even with a stringent convergence criterion . Figure 7b reveals ME = . The eigenvalue obtained has a relative error of . The AE for is . The accuracy in every aspect is significantly improved by comparing to ME = , relative error = and = obtained in Section 5.5.
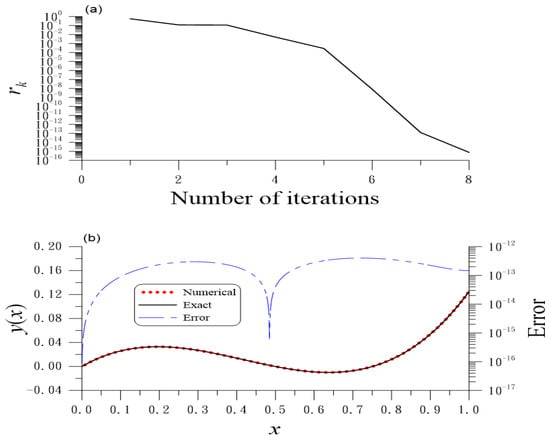
Figure 7.
For example 7 solved by the FQNM, the improvements of (a) the residuals and (b) numerical and exact solutions and error.
7.4. Examples 8 and 9 Again
For the second type nonlocal Sturm–Liouville problem in Section 6, we apply the two-dimensional FQNM to solve
where and . In each computation of and , we need to integrate
For example 9 solved by the BSFM and two-dimensional FQNM, we take , , . Through 14 iterations we obtain AE, and . As shown in Figure 5 by a thick dashed line, we obtain the third solution with an ended value .
For example 8 solved by the BSFM and two-dimensional FQNM, we take , , , . Through eleven iterations we obtain AE, and . As shown in Figure 8, we obtain the second solution with an ended value . The solution of this problem is not unique even , and are imposed.
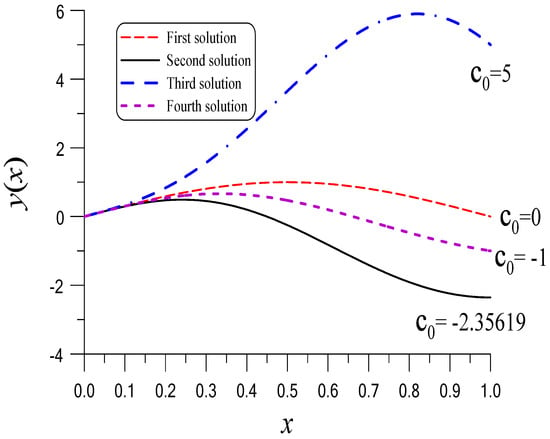
Figure 8.
For example 8 comparing four solutions with different ended values. The first solution is obtained by the BSFM, while other solutions are obtained by the BSFM and FQNM.
We find that for the second type of NSLP in Section 6 there are many solutions with different ended values. To resolve this problem by using the BSFM, two-dimensional FQNM and the iterative method in Section 6.2, we take and ; AE and are obtained. As shown in Figure 8 remarked by , we obtain the third solution with an ended value . When we take and , AE and are obtained. As shown in Figure 8 remarked by , we obtain the fourth solution with an ended value . For example 9, we can also observe this phenomenon with many solutions corresponding to different ended values of the eigenfunctions.
8. Conclusions
Because two unknowns with a missing left-end value of the eigenfunction and eigenvalue are involved, the original generalized Sturm–Liouville problem is more difficult to solve than the presented formulation in the paper. We transformed the GSLP to a definite initial value problem. For the uniqueness of the eigenfunction, by giving a normalization condition we reduced two unknowns to an unknown for the eigenvalue, which is then solved from a target equation in terms of the right boundary condition. The proposed method converged very fast and example tests revealed the high precision of the eigenvalues obtained. We have resolved two types of NSLPs with integral boundary conditions specified on the right end. The appearance of nonlocal potential in the ODE led to some interesting phenomena, which are totally different from the SLP. The methods based on the boundary shape function methods and fixed-quasi-Newton methods were developed, which can accurately determine the eigenvalues and compute the eigenfunctions. For the first type of NSLP, an extra slope condition of the solution on the left end guarantees the uniqueness of the solution and the positiveness of the eigenvalue. For the second type of NSLP, two extra conditions of the slope of the solution on the left end and the specification of the ended value on the right end guarantees the uniqueness of the solution. For the second type of NSLP, the eigenvalue may be negative, and many different solutions happened for different end values. Four numerical testing examples demonstrated that the proposed iterative algorithm could achieve high precision eigenvalues. There are two factors to cause the high accuracy of eigenvalue and eigenfunction: the integration of the resulting ODEs by the fourth-order Runge–Kutta method and the boundary conditions being strictly satisfied.
The novelties involved in the paper were as follows:
- Mathematically transforming the generalized Sturm–Liouville problem to an initial value problem of a second-order ODE and an implicit nonlinear equation.
- Obtaining a very precise eigenvalue of the generalized Sturm–Liouville problem by using LHL on the implicit nonlinear equation.
- Mathematically transforming nonlocal Sturm–Liouville problems to the initial value problems and an implicit nonlinear equation.
- For nonlocal Sturm–Liouville problems the initial value problems and two implicit nonlinear equations were derived.
- The two-dimensional fixed-quasi-Newton method is used to solve two implicit nonlinear equations, quickly obtaining highly accurate eigenvalues.
Author Contributions
Conceptualization, C.-S.L. and C.-W.C.; Methodology, C.-S.L. and C.-W.C.; Software, C.-S.L., C.-W.C. and C.-L.K.; Validation, C.-S.L., C.-W.C. and C.-L.K.; Formal analysis, C.-S.L. and C.-W.C.; Investigation, C.-S.L., C.-W.C. and C.-L.K.; Resources, C.-S.L. and C.-W.C.; Data curation, C.-S.L., C.-W.C. and C.-L.K.; Writing—original draft, C.-S.L.; Writing—review & editing, C.-W.C.; Visualization, C.-S.L., C.-W.C. and C.-L.K.; Supervision, C.-S.L. and C.-W.C.; Project administration, C.-W.C.; Funding acquisition, C.-W.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work was financially supported by the National Science and Technology Council [grant numbers: NSTC 112-2221-E-239-022].
Data Availability Statement
The data presented in this study are available on request from the corresponding authors.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Aliyev, Y.N.; Kerimov, N. The basis property of Sturm–Liouville problems with boundary conditions depending quadratically on the eigenparameter. Arabian J. Sci. Eng. 2008, 33, 123–136. [Google Scholar]
- Binding, P.A.; Browne, P.J. Oscillation theory for indefinite Sturm–Liouville problems with eigenparameter-dependent boundary conditions. Proc. Royal Soc. Edinb. 1997, 127A, 1123–1136. [Google Scholar] [CrossRef]
- Chanane, B. Computation of the eigenvalues of Sturm–Liouville problems with parameter dependent boundary conditions using the regularized sampling method. Math. Comput. 2005, 74, 1793–1801. [Google Scholar] [CrossRef]
- Reutskiy, S.Y. A meshless method for nonlinear, singular and generalized Sturm–Liouville problems. Comput. Model. Eng. Sci. 2008, 34, 227–252. [Google Scholar]
- Reutskiy, S.Y. The method of external excitation for solving generalized Sturm–Liouville problems. J. Comput. Appl. Math. 2010, 233, 2374–2386. [Google Scholar] [CrossRef]
- Chanane, B. Sturm–Liouville problems with parameter dependent potential and boundary conditions. J. Comput. Appl. Math. 2008, 212, 282–290. [Google Scholar] [CrossRef][Green Version]
- Annaby, M.H.; Tharwat, M.M. On sampling theory and eigenvalue problems with an eigenparameter in the boundary conditions. SUT J. Math. 2006, 42, 157–175. [Google Scholar] [CrossRef]
- Chanane, B. Computing the spectrum of non-self-adjoint Sturm–Liouville problems with parameter-dependent boundary conditions. J. Comput. Appl. Math. 2007, 206, 229–237. [Google Scholar] [CrossRef]
- El-Gamel, M. Numerical comparison of sinc-collocation and Chebychev-collocation methods for determining the eigenvalues of Sturm–Liouville problems with parameter-dependent boundary conditions. SeMA J. 2014, 66, 29–42. [Google Scholar] [CrossRef]
- Aliyev, Y.N. Minimality properties of Sturm–Liouville problems with increasing affine boundary conditions. Operator Theo. Funct. Ana. Appl. 2021, 282, 33–49. [Google Scholar]
- Aydemir, K. Boundary value problems with eigenvalue depending boundary and transmission conditions. Boundary Value Prob. 2014, 2014, 131. [Google Scholar] [CrossRef][Green Version]
- Olgara, H.; Mukhtarova, O.S.; Aydemir, K. Some properties of eigenvalues and generalized eigenvectors of one boundary value problem. Filomat 2018, 32, 911–920. [Google Scholar] [CrossRef]
- Chu, J.; Meng, G.; Zhang, Z. Minimizations of positive periodic and Dirichlet eigenvalues for general indefinite Sturm–Liouville problems. Adv. Math. 2023, 432, 109272. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Y.; Ao, J.J. A generalized discontinuous Sturm–Liouville problem with boundary conditions rationally dependent on the eigenparameter. J. Differ. Equ. 2023, 352, 354–372. [Google Scholar] [CrossRef]
- Pandey, P.K.; Pandey, R.K.; Agrawal, O.P. Sturm’s theorems for generalized derivative and generalized Sturm–Liouville problem. Math. Commun. 2023, 28, 141–152. [Google Scholar]
- Farzana, H.; Bhowmik, S.K.; Alim, M.A. Bernstein collocation technique for a class of Sturm–Liouville problems. Heliyon 2024, 10, e28888. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Wang, X. Sharp estimates of lowest positive Neumann eigenvalue for general indefinite Sturm–Liouville problems. J. Differ. Equ. 2024, 382, 302–320. [Google Scholar] [CrossRef]
- Belinskiy, B.P.; Smith, T.A. Optimal mass of structure with motion described by Sturm–Liouville operator: Design and predesign. Electron. J. Differ. Equ. 2024, 2024, 1–19. [Google Scholar] [CrossRef]
- Boucherif, A. Second order boundary value problems with integral boundary condition. Nonlinear Anal. 2009, 70, 364–371. [Google Scholar] [CrossRef]
- Dehghan, M. Numerical solution of a non-local boundary value problem with Neumann’s boundary conditions. Commun. Numer. Meth. Eng. 2003, 19, 1–12. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, W.; Du, H. A new reproducing kernel method for Duffing equations. Int. J. Comput. Math. 2021, 98, 2341–2354. [Google Scholar] [CrossRef]
- Ahmad, B.; Alsaedi, A.; Alghamdi, B.S. Analytic approximation of solutions of the forced Duffing equation with integral boundary conditions. Nonlinear Anal. Real World Appl. 2008, 9, 1727–1740. [Google Scholar] [CrossRef]
- Goodrich, C.S. On a nonlocal BVP with nonlinear boundary conditions. Results Math. 2013, 63, 1351–1364. [Google Scholar] [CrossRef]
- Webb, J.R.L.; Infante, G. Positive solutions of nonlocal boundary value problems involving integral conditions. Nonlinear Diff. Equ. Appl. 2008, 15, 45–67. [Google Scholar] [CrossRef]
- Liu, C.S.; Chang, J.R. Boundary shape functions methods for solving the nonlinear singularly perturbed problems with Robin boundary conditions. Int. J. Nonlinear Sci. Numer. Simul. 2020, 21, 797–806. [Google Scholar] [CrossRef]
- Liu, C.S. Accurate eigenvalues for the Sturm–Liouville problems, involving generalized and periodic ones. J. Math. Research 2022, 14, 1–19. [Google Scholar] [CrossRef]
- Peciulyte, S.; Stikoniene, O.; Stikonas, A. Sturm-Liouvelle problem for stationary differential operator with nonlocal integral boundary condition. Math. Model. Anal. 2005, 10, 377–392. [Google Scholar] [CrossRef]
- Stikonas, A. The Sturm-Liouvelle problem with a nonlocal boundary condition. Liet. Mat. Rink. 2007, 47, 410–428. [Google Scholar]
- Nizhnik, L.P. Inverse eigenvalue problems for nonlocal Sturm-Liouvelle operators. Meth. Func. Anal. Topol. 2009, 15, 41–47. [Google Scholar]
- Stikonas, A.; Stikoniene, O. Characteristic functions for Sturm–Liouville problems with nonlocal boundary conditions. Math. Model. Anal. 2009, 14, 229–246. [Google Scholar] [CrossRef]
- Kandemir, M.; Mukhtarov, O.S. Nonlocal Sturm–Liouville problems with integral terms in the boundary conditions. Elect. J. Diff. Equ. 2017, 2017, 1–12. [Google Scholar]
- Stikonas, A. A survey on stationary problems, Green’s functions and spectrum of Sturm–Liouville problem with nonlocal boundary conditions. Nonl. Anal. Contr. 2014, 19, 301–334. [Google Scholar] [CrossRef]
- Liu, C.S.; Hong, H.K.; Lee, T.L. A splitting method to solve a single nonlinear equation with derivative-free iterative schemes. Math. Comput. Simul. 2021, 190, 837–847. [Google Scholar] [CrossRef]
- Liu, Z.; Qi, J. The properties of eigenvalues and eigenfunctions for nonlocal Sturm–Liouville problems. Symmetry 2021, 13, 820. [Google Scholar] [CrossRef]
- Albeverio, S.; Hryniv, R.O.; Nizhnik, L.P. Inverse spectral problems for non-local Sturm–Liouville operators. Inv. Prob. 2007, 23, 523–535. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).