


Finite-Time Extended State Observer-Based Attitude Control for Hypersonic Vehicles with Angle-of-Attack Constraint

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (i)
- In order to achieve the constrained control of disturbance estimation and compensation for HSVs, we design an integrated observation and control scheme. The matched and mismatched disturbances can be estimated by FTESO, and the disturbance observations are compensated into the backstepping controller based on BLF.
- (ii)
- By utilizing the AAPI technique and ESO technique synthetically, a novel FTESO is firstly established to estimate time-varying disturbances. Compared with another FTESO [34,35], the proposed FTESO has more advantages in restraining fluctuations. In particular, we propose an auxiliary observer to solve the problem that extended internal states (i.e., the observation errors of disturbances) are unavailable as feedback to the virtual observation controller. The FTESO constructed on the above basis can achieve bounded estimated errors in finite time.
- (iii)
- In constructing the BLF, we develop a novel monotone decreasing boundary to replace the constant boundary of traditional BLF. The proposed time-varying barrier function can adapt to various initial tracking errors by setting reasonable parameters. It is guaranteed that the tracking errors are bounded while the constraint of AOA can be proved theoretically.
2. Problem Formulation
- (i)
- Disturbance observation errors are uniformly ultimately bounded in finite time, i.e., there exists a constant , which holds , where are small residual sets;
- (ii)
- Attitude tracking errors satisfy the boundary constraints, where represents a reference attitude angle, i.e., given error system bounds , we have ;
- (iii)
- All signals in the closed-loop control system of the HSV are guaranteed to be uniformly ultimately bounded.
3. Attitude Controller Design
3.1. Control Scheme
3.2. Finite-Time Extended State Observer
3.3. Controller Design
4. Simulations and Comparisons
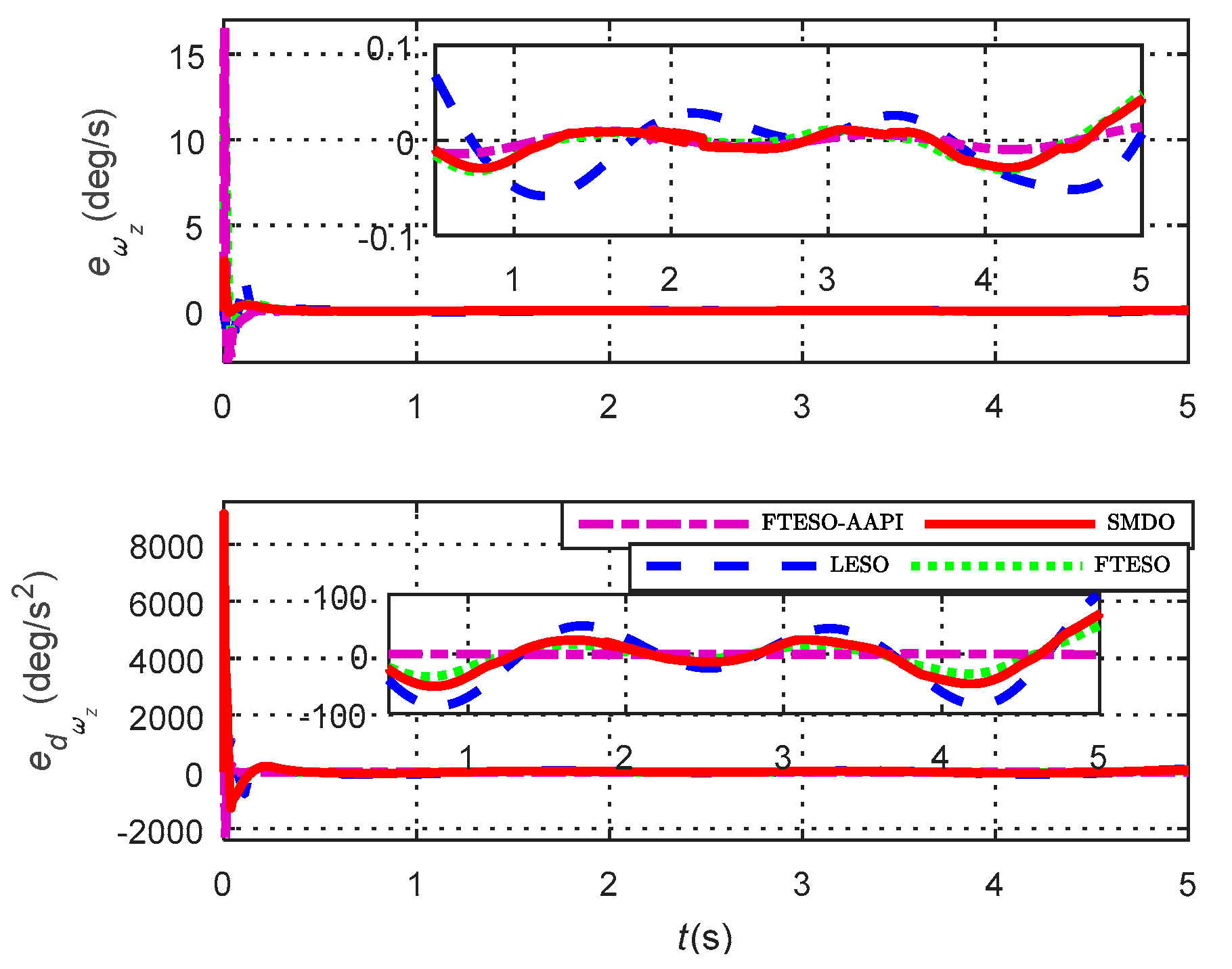
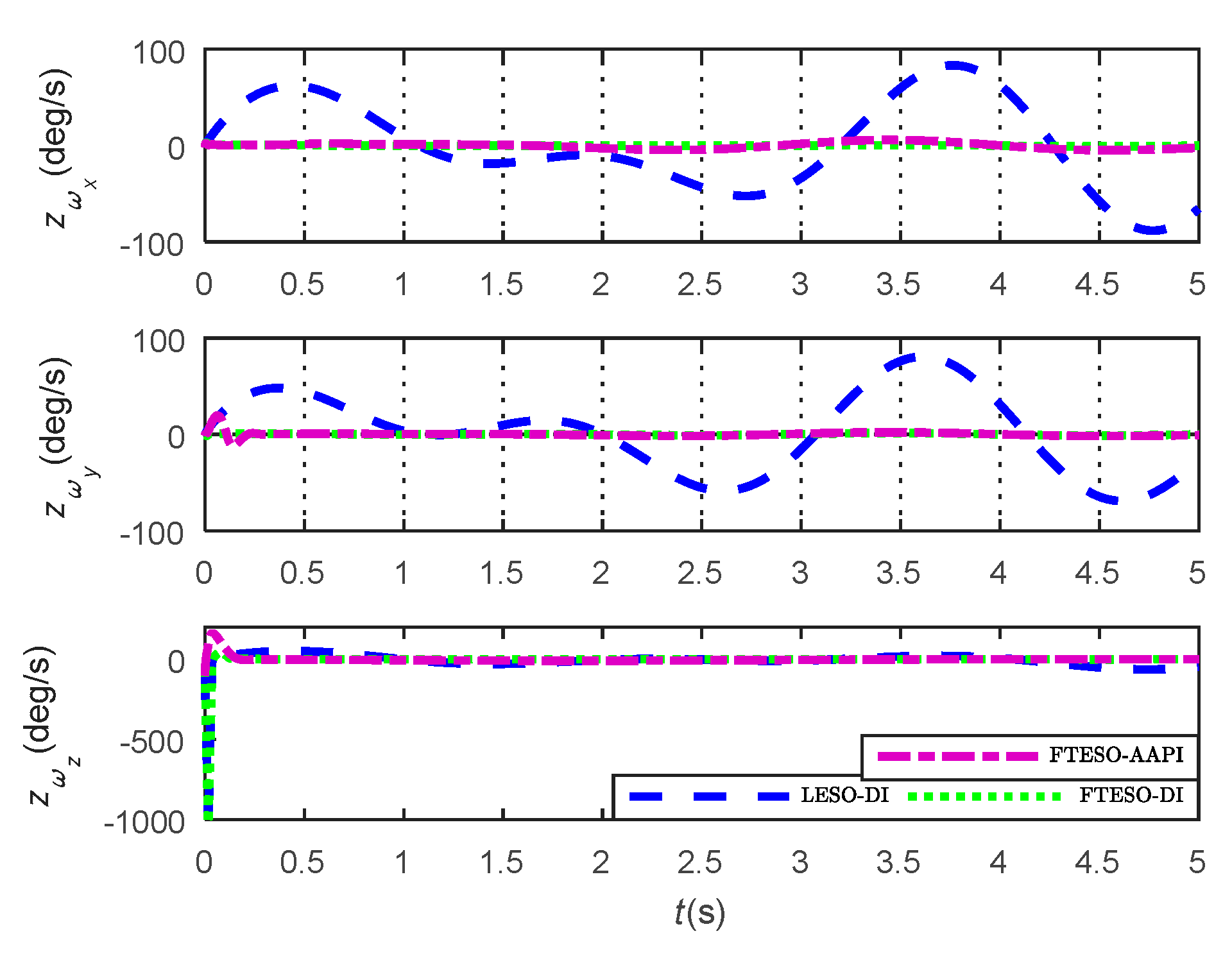
4.1. Observer-Effect Verification
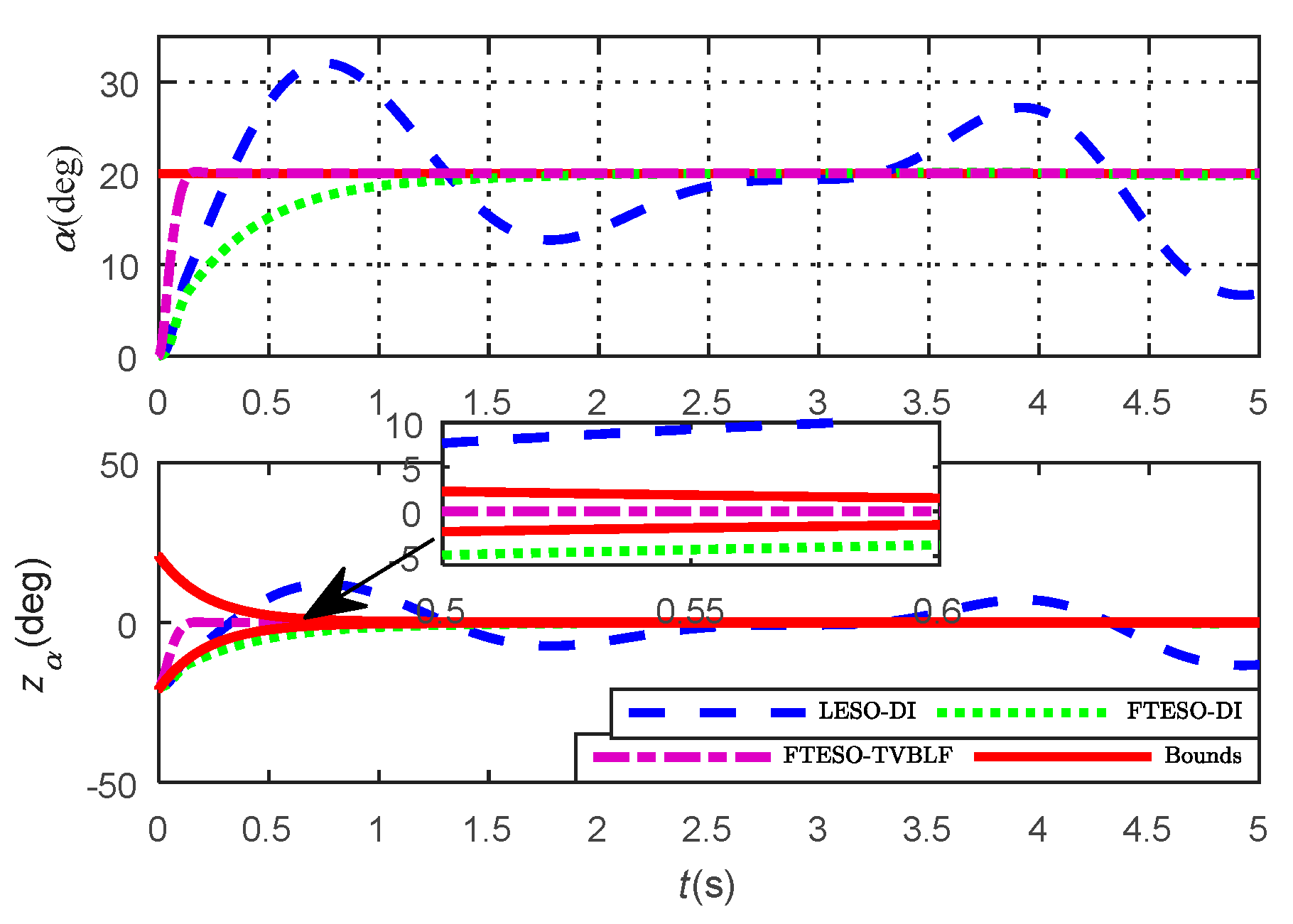
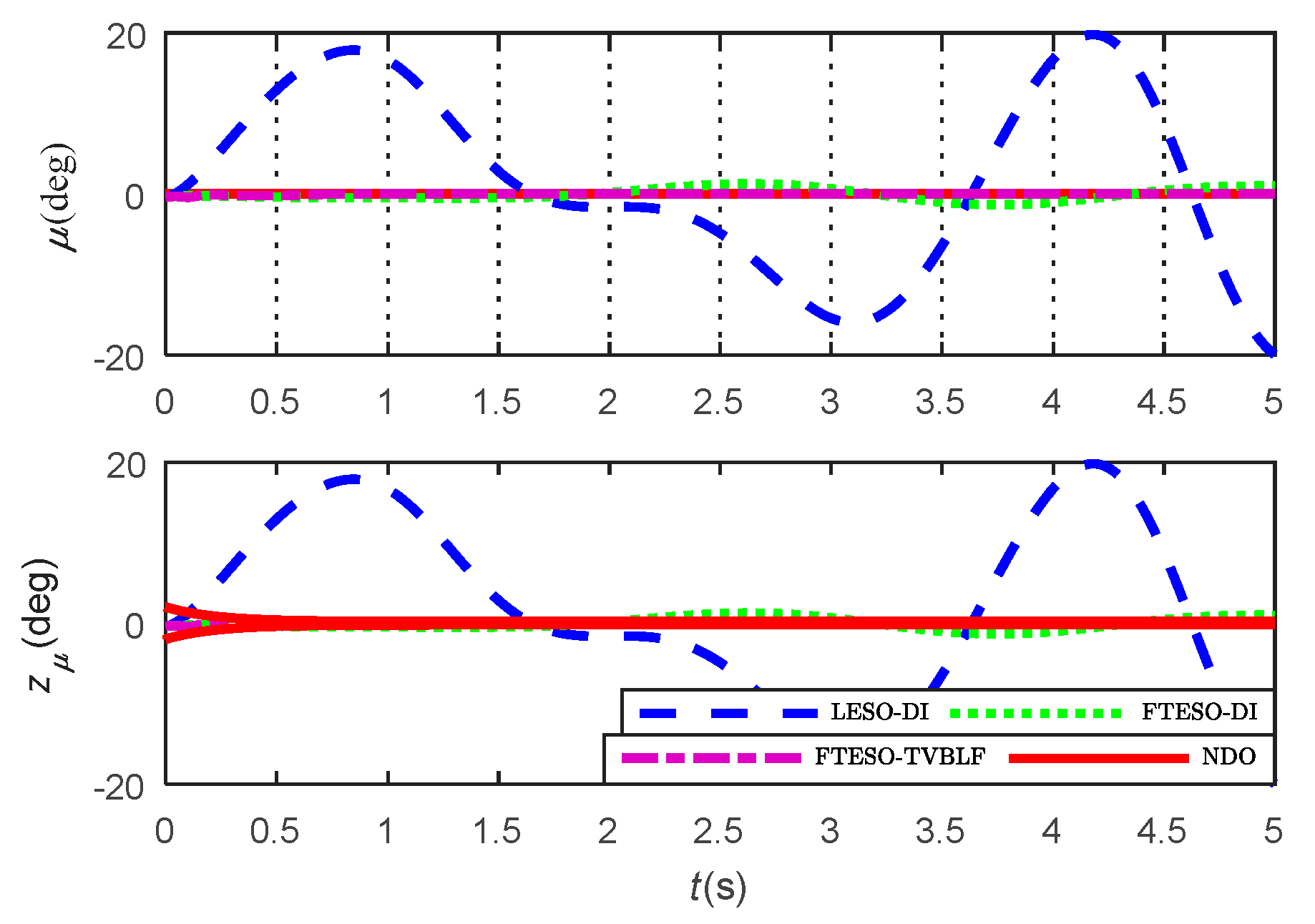
4.2. Controller-Effect Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ding, H.; Xu, B.; Wu, X. Research progress and prospects on intelligent control methods for hypersonic flight vehicles. In Proceedings of the 4th International Conference on Computer Engineering and Intelligent Control, Zhuhai, China, 20–22 October 2023; pp. 507–514. [Google Scholar]
- Xu, B.; Shi, Z. An overview on flight dynamics and control approaches for hypersonic vehicles. Sci. China Inf. Sci. 2015, 58, 070201. [Google Scholar] [CrossRef]
- Zhen, W.B.; Wang, Y.H.; Wu, Q.X.; Shao, P. Coordinated attitude control of hypersonic flight vehicles based on the coupling analysis. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 1002–1011. [Google Scholar] [CrossRef]
- Rehman, O.U.; Petersen, I.R.; Fidan, B. Feedback linearization-based robust nonlinear control design for hypersonic flight vehicles. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2013, 227, 3–11. [Google Scholar] [CrossRef]
- Hu, X.; Wu, L.; Hu, C.; Gao, H. Fuzzy guaranteed cost tracking control for a flexible air-breathing hypersonic vehicle. IET Control Theory Appl. 2012, 6, 1238–1249. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, J.; Yu, C. Adaptive backstepping sliding mode control of air-breathing hypersonic vehicles. Int. J. Aerosp. Eng. 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Xu, B.; Wang, X.; Shi, Z. Robust adaptive neural control of nonminimum phase hypersonic vehicle model. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1107–1115. [Google Scholar] [CrossRef]
- An, H.; Wang, C.; Fidan, B. Sliding mode disturbance observer-enhanced adaptive control for the air-breathing hypersonic flight vehicle. Acta Astronaut. 2017, 139, 111–121. [Google Scholar] [CrossRef]
- Guo, Z.Y.; Chang, J.; Guo, J.G.; Zhou, J. Adaptive twisting sliding mode algorithm for hypersonic reentry vehicle attitude control based on finite-time observer. ISA Trans. 2018, 77, 20–29. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Sun, T. Disturbance observer-based sliding manifold predictive control for reentry hypersonic vehicles with multi-constraint. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 485–495. [Google Scholar] [CrossRef]
- An, H.; Wu, Q.Q. Disturbance rejection dynamic inverse control of air-breathing hypersonic vehicles. Acta Astronaut. 2018, 151, 348–356. [Google Scholar] [CrossRef]
- Yin, Y.; Liu, J.; Sanchez, J.A.; Wu, L.; Vazquez, S.; Leon, J.I.; Franquelo, L.G. Observer-based adaptive sliding mode control of NPC converters: An RBF neural network approach. IEEE Trans. Power Electron. 2019, 34, 3831–3841. [Google Scholar] [CrossRef]
- Yu, T.; Zhao, Y.; Wang, J.; Liu, J. Event-triggered sliding mode control for switched genetic regulatory networks with persistent dwell time. Nonlinear Anal. Hybrid Syst. 2022, 44, 101135. [Google Scholar] [CrossRef]
- Sun, Y.; Gao, Y.; Zhao, Y.; Liu, Z.; Wang, J.; Kuang, J.; Yan, F.; Liu, J. Neural network-based tracking control of uncertain robotic systems: Predefined-time nonsingular terminal sliding-mode approach. IEEE Trans. Ind. Electrons. 2022, 69, 10510–10520. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, J.; Gao, Y.; Liu, Z.; Zhao, Y. Adaptive neural tracking control for manipulators with prescribed performance under input saturation. IEEE/ASME Trans. Mech. 2022, 28, 1037–1046. [Google Scholar] [CrossRef]
- Han, J. From PID technique to active disturbances rejection control technique. Control Eng. China 2002, 9, 13–18. [Google Scholar]
- Sun, Y.; Xu, J.; Wu, H.; Lin, G.; Mumtaz, S. Deep learning based semi-supervised control for vertical security of maglev vehicle with guaranteed bounded airgap. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4431–4442. [Google Scholar] [CrossRef]
- Zhao, L.; Zheng, C.; Wang, Y.; Liu, B. A finite-time control for a pneumatic cylinder servo system based on a super-twisting extended state observer. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1164–1173. [Google Scholar] [CrossRef]
- Xia, Y.; Zhu, Z.; Fu, M. Back-stepping sliding mode control for missile systems based on an extended state observer. IET Control Theory Appl. 2011, 5, 93–102. [Google Scholar] [CrossRef]
- Gao, Z.Q. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Zhao, Z.L.; Guo, B.Z. On active disturbance rejection control for nonlinear systems using time-varying gain. Eur. J. Control. 2015, 23, 62–70. [Google Scholar] [CrossRef]
- Shen, Y.J.; Huang, Y.H.; Gu, J. Global finite-time observers for lipschitz nonlinear systems. IEEE Trans. Autom. Control. 2011, 56, 418–424. [Google Scholar] [CrossRef]
- Wu, D.; Chen, M.; Gong, H. Robust control of post-stall pitching maneuver based on finite-time observer. ISA Trans. 2017, 70, 53–63. [Google Scholar] [CrossRef]
- Chen, M.; Wu, Q.X.; Cui, R.X. Terminal sliding mode tracking control for a class of SISO uncertain nonlinear systems. ISA Trans. 2013, 52, 198–206. [Google Scholar] [CrossRef] [PubMed]
- Jiang, B.; Li, C.; Ma, G. Finite-time output feedback attitude control for spacecraft using “Adding a power integrator” technique. Aerosp. Sci. Technol. 2017, 66, 342–354. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C. Adding one power integrator: A tool for global stabilization of high-order lower-triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]
- Dong, C.Y.; Liu, Y.; Wang, Q. Adaptive backstepping controller design for hypersonic vehicle with limited angle of attack. J. Astronaut. 2020, 41, 174. [Google Scholar]
- He, W.; Yin, Z.; Sun, C. Adaptive neural network control of a marine vessel with constraints using the asymmetric barrier Lyapunov function. IEEE Trans. Cybern. 2016, 47, 1641–1651. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.J.; Tong, S. Barrier Lyapunov functions for Nussbaum gain adaptive control of full state constrained nonlinear systems. Autom. 2017, 76, 143–152. [Google Scholar] [CrossRef]
- Tee, K.; Ge, S.S.; Tay, E. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Liu, C.; Dong, C.Y.; Zhou, Z.J.; Wang, Z.L. Barrier Lyapunov function based reinforcement learning control for air-breathing hypersonic vehicle with variable geometry inlet. Aerosp. Sci. Technol. 2020, 96, 105537. [Google Scholar] [CrossRef]
- Dong, C.Y.; Liu, Y.; Wang, Q. Barrier Lyapunov function based adaptive finite-time control for hypersonic flight vehicles with state constraints. ISA Trans. 2020, 96, 163–176. [Google Scholar] [CrossRef]
- Guo, Y.; Yan, T.; Xu, B.; Tao, G.; Sun, S. Asymmetric integral BLF based state-constrained flight control using NN and DOB. Int. J. Robust Nonlinear Control 2022, 32, 3021–3038. [Google Scholar] [CrossRef]
- Li, B.; Liu, W.; Qin, K.; Xiao, B.; Yang, Y. Finite-time extended state observer based fault tolerant output feedback control for UAV attitude stabilization under actuator failures and disturbances. In Fundamental Design and Automation Technologies in Offshore Robotics; Academic Press: Cambridge, MA, USA, 2020; pp. 309–336. [Google Scholar]
- Zhao, J.; Feng, D.; Cui, J.; Wang, X. Finite-time extended state observer-based fixed-time attitude control for hypersonic vehicles. Mathematics 2022, 10, 3162. [Google Scholar] [CrossRef]
- Snell, S.A. Nonlinear Dynamic-Inversion Flight Control of Supermaneuverable Aircraft; University of Minnesota: Minneapolis, MN, USA, 1991. [Google Scholar]
- Qian, C.; Lin, W. A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. Control 2001, 46, 1061–1079. [Google Scholar] [CrossRef]
- Qian, C.; Ji, L. Global finite-time stabilization by output feedback for planar systems without observable linearization. IEEE Trans. Autom. Control 2005, 50, 885–890. [Google Scholar] [CrossRef]
- Hu, Q.; Jiang, B.; Zhang, Y. Observer-based output feedback attitude stabilization for spacecraft with finite-time convergence. IEEE Trans. Control Syst. Technol. 2017, 27, 781–789. [Google Scholar] [CrossRef]
- Guo, B.Z.; Zhao, Z.L. On convergence of tracking differentiator. Int. J. Control 2011, 84, 693–701. [Google Scholar] [CrossRef]
- Sun, J.; Yi, J.; Pu, Z.; Tan, X. Fixed-time sliding mode disturbance observer-based nonsmooth backstepping control for hypersonic vehicles. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 50, 4377–4386. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Q.; Sun, R.; Lu, Y.; Liu, X. Finite-Time Extended State Observer-Based Attitude Control for Hypersonic Vehicles with Angle-of-Attack Constraint. Mathematics 2024, 12, 1061. https://doi.org/10.3390/math12071061
Lu Q, Sun R, Lu Y, Liu X. Finite-Time Extended State Observer-Based Attitude Control for Hypersonic Vehicles with Angle-of-Attack Constraint. Mathematics. 2024; 12(7):1061. https://doi.org/10.3390/math12071061
Chicago/Turabian StyleLu, Qingli, Ruisheng Sun, Yu Lu, and Xuanting Liu. 2024. "Finite-Time Extended State Observer-Based Attitude Control for Hypersonic Vehicles with Angle-of-Attack Constraint" Mathematics 12, no. 7: 1061. https://doi.org/10.3390/math12071061
APA StyleLu, Q., Sun, R., Lu, Y., & Liu, X. (2024). Finite-Time Extended State Observer-Based Attitude Control for Hypersonic Vehicles with Angle-of-Attack Constraint. Mathematics, 12(7), 1061. https://doi.org/10.3390/math12071061