

Dynamic Cooperative Oligopolies
{kind=link}
Abstract
1. Introduction
2. The Basic Model
3. Dynamic Extension
4. Dynamic Extension with Time Delay
5. Conclusions
- 1.
- Under realistic conditions, the steady state in the no-delay case was always asymptotically stable, meaning that the components of the state trajectory converged to the industry profit maximizing output levels.
- 2.
- In the one-delay symmetric case, the steady state was always asymptotically stable if the number of firms was small; otherwise, asymptotic stability occurred if the length of the delay was smaller than a given threshold value, at which stability was lost via Hopf bifurcation.
- 3.
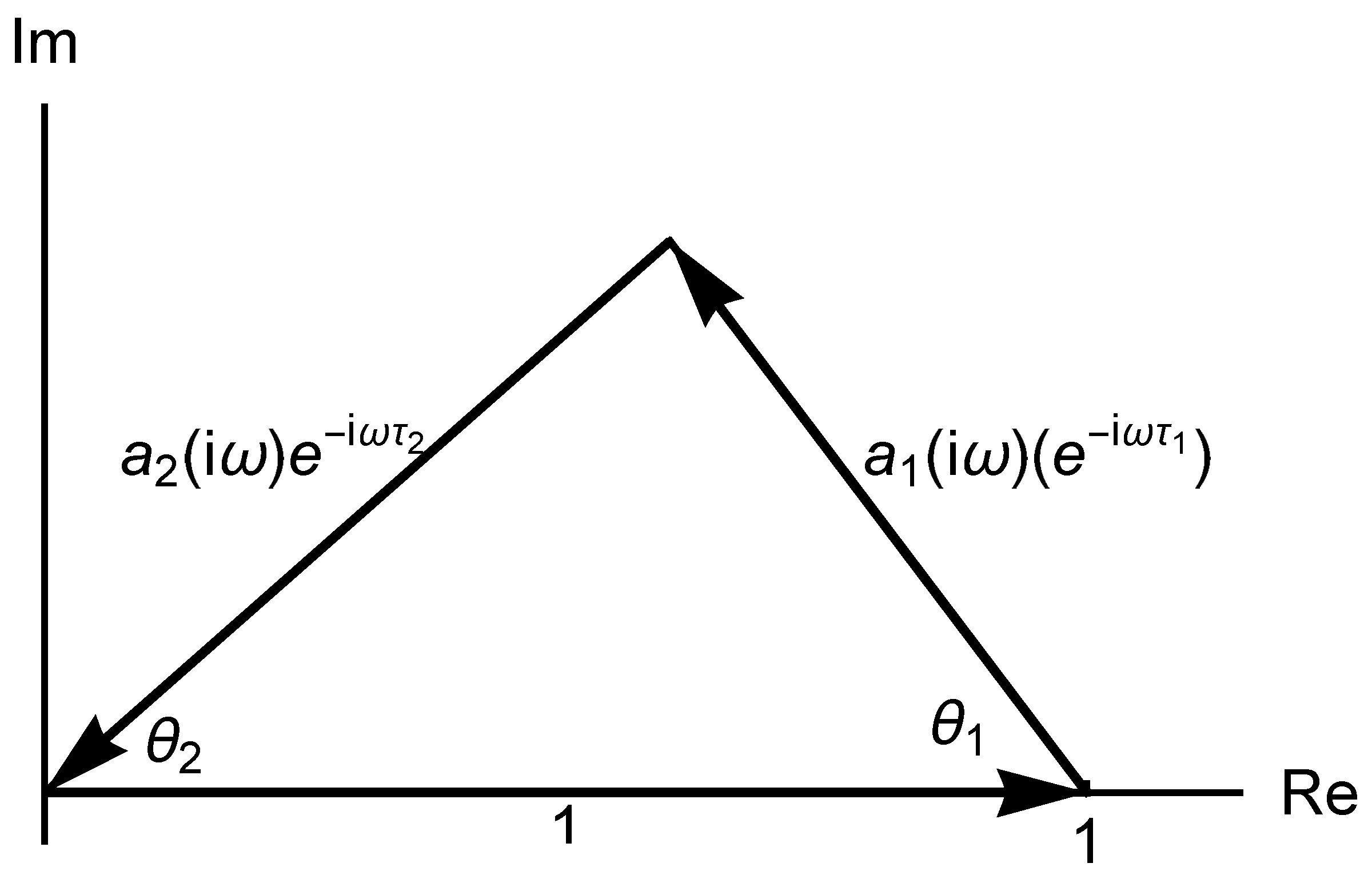
- In the two-delay case, the stability switching curves were determined in the two-dimensional delay space. The stability region contained the origin and was under or left of these curves.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cournot, A. Recherches sur les Principes Mathématiques de la Théorie des Richessess; Hachette: Paris, France, 1838; English Translation Researches into the Mathematical Principles of the Theory of Wealth; Kelley: New York, NY, USA, 1960. [Google Scholar]
- Burger, E. Einfuhrung in die Theorie der Spiele; De Gruyter: Berlin, Germany, 1959. [Google Scholar]
- Friedman, J. Oligopoly and the Theory of Games; North Holland Publishing Company: Amsterdam, The Netherland, 1977. [Google Scholar]
- Okuguchi, K. Expectations and Stability in Oligopoly Models; Springer: Berlin, Germany, 1976. [Google Scholar]
- Hahn, F. The stability of the Cournot oligopoly solution. Rev. Econ. Stud. 1962, 29, 329–331. [Google Scholar] [CrossRef]
- Theocharis, R. On the stability of the Cournot solution on the oligopoly problem. Rev. Econ. Stud. 1959, 27, 133–134. [Google Scholar] [CrossRef]
- Furth, D. Stability and instability in oligopoly. J. Econ. Theory 1986, 40, 197–228. [Google Scholar] [CrossRef]
- Agiza, H.; Elsadany, A. Nonlinear dynamics in the Cournot duopoly game with heterogeneous players. Phys. A 2003, 320, 512–524. [Google Scholar] [CrossRef]
- Puu, T. Attractors, Bifurcations, and Chaos: Nonlinear Phenomena in Economics, 2nd ed.; Springer: Berlin, Germany, 2003. [Google Scholar]
- Bellman, R.; Cooke, K.-L. Differential-Difference Equations; Academic Press: New York, NY, USA, 1963. [Google Scholar]
- Cushing, J. Integro-Difference Equations and Delay Models in Population Dynamics; Springer: Berlin, Germany, 1977. [Google Scholar]
- Driessen, T. Cooperative Games, Solutions and Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Szép, J.; Forgó, F. Introduction to the Theory of Games; Akadémai Kiadó: Budapest, Hungary, 1985. [Google Scholar]
- Shapley, L. A Value for n-Person Games. In Contributions to the Theory of Games II; Kuhn, H., Tucker, A., Eds.; Princeton University Press: Princeton, NJ, USA, 1953; pp. 307–317. [Google Scholar]
- Petrosyan, L.; Mazalov, V. Recent Advances in Game Theory and Applications; Birkhäuser: Basel, Switzerland, 2016. [Google Scholar]
- Dinar, A.; Ratner, A.; Yaron, D. Evaluating cooperative game theory in water resources. Theory Decis. 1992, 32, 1–20. [Google Scholar] [CrossRef]
- McKinney, D.; Teasley, R. Cooperative game theory for transboundary river basins: The Syr Darya Basin. In Proceedings of the World Environmental and Water Resources Congress 2007, Restoring Our Natural Habitat, Tampa, FL, USA, 15–19 May 2007; pp. 1–10. [Google Scholar]
- Churkin, A.; Bialek, J.; Pozo, D.; Sauma, E.; Korgin, N. Review of cooperative game theory applications in power system expansion planning. Renew. Sustain. Energy Rev. 2021, 145, 111056. [Google Scholar] [CrossRef]
- Eryganov, T.; Šomplàr, K.; Nevrly, V. Application of cooperative game theory in waste manamement. Chem. Eng. Trans. 2020, 81, 877–882. [Google Scholar]
- Song, D.; Panayides, P. A conceptural application of cooperative game theory to liner shipping strategic alliances. Marit. Policy Manag. 2002, 29, 285–301. [Google Scholar] [CrossRef]
- Saeed, N.; Larsen, O. An application of cooperative game among container terminals of one port. Eur. J. Oper. Res. 2010, 203, 393–403. [Google Scholar] [CrossRef]
- Lemaire, J. Cooperative game theory and its insurance applications. ASTIN Bull. J. IAA 1991, 21, 17–40. [Google Scholar] [CrossRef]
- Molinero, X.; Riquelme, F. Influence of decision models: From cooperative game theory to social netwark analysis. Comput. Sci. Rev. 2021, 39, 100343. [Google Scholar] [CrossRef]
- Saad, W.; Han, Z.; Debbah, M.; Hjorungness, A.; Bašar, T. Coalition game theory for communication networks. IEEE Signal Process. Mag. 2009, 26, 77–97. [Google Scholar] [CrossRef]
- Tavanayi, M.; Hafezalkotob, A.; Valizadeh, J. Cooperative cellural manufaturing system: A cooperative game theory approach. Sci. Iran. 2021, 28, 2769–2788. [Google Scholar]
- Dhamal, S.; Bhat, S.; Anoop, K.; Embar, V. Pattern clustering using cooperative game theory. arXiv 2012, arXiv:1201.0461. [Google Scholar]
- Stuart, H., Jr. Cooperative Games and Business Strategy. In Game Theory and Business Applications, Kluwer’s International Series; Chatteree, K., Samuelson, W.F., Eds.; Springer: Boston, MA, USA, 2001; pp. 189–211. [Google Scholar]
- Szidarovszky, F.; Bahill, T. Linear Systems Theory, 2nd ed.; CRC Press: Boca Raton, FL, USA; London, UK; New York, NY, USA, 1998. [Google Scholar]
- Bischi, G.-I.; Chiarella, C.; Kopel, M.; Szidarovszky, F. Nonlinear Oligopolies: Stability and Bifurcations; Springer: Berlin, Germany, 2010. [Google Scholar]
- Matsumoto, A.; Szidarovszky, F. Dynamic Oligopolies with Time Delays; Springer Nature: Singapore, 2018. [Google Scholar]
- Gu, K.; Nicolescue, S.-I.; Chen, J. On stability switching curves for general systems with two delays. J. Math. Ann. Appl. 2005, 311, 231–253. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szidarovszky, F.; Matsumoto, A. Dynamic Cooperative Oligopolies. Mathematics 2024, 12, 891. https://doi.org/10.3390/math12060891
Szidarovszky F, Matsumoto A. Dynamic Cooperative Oligopolies. Mathematics. 2024; 12(6):891. https://doi.org/10.3390/math12060891
Chicago/Turabian StyleSzidarovszky, Ferenc, and Akio Matsumoto. 2024. "Dynamic Cooperative Oligopolies" Mathematics 12, no. 6: 891. https://doi.org/10.3390/math12060891
APA StyleSzidarovszky, F., & Matsumoto, A. (2024). Dynamic Cooperative Oligopolies. Mathematics, 12(6), 891. https://doi.org/10.3390/math12060891