Abstract
A guaranteed performance event-triggered adaptive consensus control is established for uncertain multiagent systems under time-varying actuator faults. To eliminate the impact caused by actuator faults, an adaptive neural network compensation strategy is developed. Simultaneously, by implementing the asymmetric barrier Lyapunov function and transform function, a prescribed time consensus control with guaranteed performance, is constructed. Furthermore, to reduce the frequency of information transmission, an adjustable switching event-triggered control (ASETC) is proposed by using a modified hyperbolic tangent function. It combines the advantage of the relative threshold strategies and the characteristics of the hyperbolic tangent function, giving better flexibility in saving network resources and guaranteeing system performance. By applying the constructed control method, systems with prescribed performance consensus in a prescribed time are achievable while limited network resources and unknown time-varying faults are present. Some simulation examples implemented in MATLAB (R2022a) are given to demonstrate the above results.
Keywords:
prescribed time; guaranteed performance; multiagent systems; actuator faults; event-triggered scheme MSC:
93D50
1. Introduction
The cooperative control of multiagent systems has attracted increasing attention in the past couple of decades, which mainly involves formation control [1], consensus control [2], and containment control [3]. As one of the essential and fundamental topics of cooperative control, the discussion about multiagent systems consensus control continues to emerge rapidly [4,5,6,7,8], of which the control objective is for a group of agents to converge to leader signals. A distributed PID controller was designed to achieve the consensus of first-order multiagent systems in [4]. For the consensus problem of second-order multiagent systems in [5], a nonlinear distributed dynamic controller was developed to address it. In general, for high-order multiagent systems, distributed control protocols were constructed to ensure the ultimate state finite-time synchronization to the leader in [6]. It is worth emphasizing that in engineering applications, actuators inevitably encounter faults.
Actuator faults, as a common phenomenon that might lead to degrade performance or even destroy instability, have attracted lots of attention from control scholars [9,10,11,12,13,14]. Taking actuator faults into consideration, an adaptive fuzzy control approach was proposed to solve the control problem of axially moving slung-load cable systems in [10]. For the linear multiagent systems in the presence of actuator faults, a fault-tolerant consensus control method was proposed in [11]. In [12,13], the compensation problem of nonlinear multiagent systems with actuator faults was addressed. Those results are effectively eliminating the adverse effect of actuator faults and giving viable references for further discussion.
Moreover, for the limitations of the components and the requirement of security in an actual application, the constraints issue is vital in the controller design process [15]. To address the various violations of the constraints issue, many resultful methods have been constructed, such as the log-barrier Lyapunov function [16,17,18,19,20] and tangent-type function [21,22,23,24]. To ensure the state constraints of fractional order uncertain strict-feedback systems, an adaptive controller was proposed by introducing log-barrier Lyapunov function in [15]. The full-state constraints problem of uncertain nonlinear multiagent systems was solved by utilizing the barrier Lyapunov function in [17]. Focusing on the asymmetric constraints problem, the asymmetric log-Barrier Lyapunov function was applied in surface vessels systems [18] and uncertain multi-input multi-output nonlinear systems [20]. Based on the tangent-type nonlinear mapping function, the full-state constraints of uncertain nonlinear systems [21] and high-order multiagent systems [22] were guaranteed. Moreover, the asymmetric constraints were ensured by the asymmetric tangent-type function in [24]. What should be noted is that for many industrial applications in real engineering, while accomplishing secure systems and a high control of accuracy, it is still required to guarantee the settling time.
The settling time, as an important specification for evaluating the performance of a constructed control protocol [25], has had a number of control results have been proposed to ensure it [26,27,28,29,30,31,32,33,34,35]. For uncertain stochastic systems, a fuzzy control strategy was proposed in [26], which is able to guarantee the finite-time stability. To ensure the finite-time track control and compensate uncertainties, a robust nonlinear controller was designed in [27]. Based on the augmented error system method, a finite-time optimal tracking controller was designed in [29]. By utilizing the fixed-time stability criterion, a fixed-time fuzzy tracking control method was proposed in [30], which achieved a faster convergence speed. For marine surface vessels, a novel fixed-time fault-tolerant control strategy was proposed to achieve the trajectory track in [31]. Focusing on multiagent systems, a fixed-time consensus control strategy [33] and a fixed-time containment control strategy [34] were constructed to guarantee fixed-time stability. Moreover, since getting rid of the restriction to the initial states or the designed parameters, the settling time of the prescribed time control can be arbitrarily preset. With such an advantage, the prescribed time control has received a lot of attention [36,37,38,39,40,41]. For pure-feedback uncertain nonlinear multiagent systems, a prescribed-time containment control scheme was studied in [37]. Via a class of scaling function, the prescribed time attitude containment control issue was addressed in [38]. Both [39,41] ensured multiagent systems consensus in the prescribed time. Nevertheless, systems always needed to converge fast. It may cause drastic variations, in particular, a short convergence time is required, and it can even result in the violation of constrained multiagent systems. How to guarantee systems’ constraints and the settling time still remains an open issue that needs to be further studied.
On the other hand, with the development of network scale and an increase in information quantity, the systems control operation could be restricted as the limitation of network resources [42]. An event-triggered control transmits the control signal based on the specific triggered condition as an effective method for overcoming the aforementioned challenges, and it has been gaining increasing attention [43,44,45,46,47,48,49,50,51,52]. The fixed threshold event-triggered mechanism was proposed, as presented in [43,44]. Noting that it is limited due to its unchanging threshold. Then, the relative threshold event-triggered mechanism was designed, as shown in [45,46,47]. Although the relative threshold scheme is more flexible by introducing the control signal as a variable, systems’ performance may be degraded when the input is as large as its high change. Thus, a class of switching threshold scheme such as [48,49,50] was proposed based on the above two schemes, which can avoid the control signal jumping abruptly and achieve a better performance. However, it is still hard to select a suitable fixed threshold that balances systems’ performance and network recourse for the scheme. To solve it, a more smooth triggered scheme is proposed based on the hyperbolic tangent function in [51]. Such a scheme can alleviate the problem in part, but when the input becomes larger, the trigger threshold becomes almost fixed according to the characteristic of function tanh(·). Under the existing methods, it is still hard to ensure systems’ performance when the control signal is large. It is still worth discussing how to save communication resources without impacting system performance.
According to the above discussion and analysis, an event-triggered-based adaptive guaranteed performance consensus control method is constructed for multiagent systems subject to actuator faults. Consequently, the main contributions are summarized as follows:
- Actuator faults are a common phenomenon in actual engineering that may impact the accomplishments of control objects. Especially for systems that require faster convergence while suffering from time-varying faults, it brings difficulty to compensation. With the aid of the transform function, an adaptive neural network compensation strategy is constructed to handle such an issue. When systems suffer from time-varying actuator faults, the investigated compensation strategy can guarantee systems prescribed time consensus;
- To improve the transient and steady performance in the control operation, the asymmetric barrier Lyapunov function is adopted to further restrain systems’ errors with minor overshoots. Moreover, considering that ensuring systems performance requires significant resources, the ASETC is developed based on the input characteristics of different periods. The presented method not only enhances systems control performance but relaxes the pressure of the communication of systems in the control operation.
The rest is structured as follows. The preliminaries and problem formulation are given in Section 2. Section 3 and Section 4 present the prescribed time consensus control design, stability analysis of multiagent systems, and experiment examples. The work’s conclusion is shown in Section 5.
Notation 1.
- •
- and represent the set of real numbers and the real numbers in M × M size space, respectively;
- •
- denotes a diagonal matrix, and · is a symbol on behalf of all the elements located in the diagonal of the matrix;
- •
- denotes the transposed matrix of the original one A;
- •
- stands for the Euclidean norm of vector B;
- •
- is the maximal function, which is capable of catching the maximum value among ⋯, and ⋯ is a 1-dimension arbitrary array.
2. Preliminaries and Problem Description
2.1. Graph Theory
Applying to express the fixed directed information exchange topology among multiagent systems (similar to [40,44]). Then, the is the set of virtual leader and agents , is the edge set from the j-th agent to the i-th agent. is the weight of the edge between the i-th agent and the j-th agent, then the weighted adjacency matrix among the agents is directed by . If the j-th agent can receive information from the i-th agent, the edge weight is ; otherwise, . Besides, is the weight of the edge between the leader and the i-th agent, then the weighted adjacency matrix can be described as . If the i-th agent can receive information from the leader, then . Otherwise, . The in-degree diagonal matrix can be presented by , where . The Laplacian matrix of can be defined as . Noting that at least one agent exists that can obtain information from the leader that , which guarantees that can be nonsingular. Then, exists for a certain path that can always reach each node from the root node .
2.2. Model Description
Consider a class of general nonlinear multiagent systems consisting of agents and one virtual leader. And each agent follows the following dynamics:
where and represent the i-th agent’s output and state. Then, , denotes the actuator output signal of the i-th agent. denote the unknown nonlinear dynamics.
Due to various external environmental influences and internal operating conditions, actuator faults inevitably happen and cause control systems to fail to properly achieve the control objects. Assuming that the actuator of the i-th agent fails at the time , and both additive faults and multiplicative faults are taken into consideration, the actuator faults model is given as follows:
where is the health factor that represents the effective control condition in the i-th agent’s actuator, and represents the bias fault in the actuators of i-th agent. Both of them are unknown and time-varying variables.
Based on the aforementioned analysis, each agent is subject to the time-varying actuator faults follows the following dynamics
The control object of this work is to propose a prescribed time neural network adaptive consensus control method, it is achievable that uncertain multiagent systems subject to time-varying actuator faults prescribed time consensus, and saving communication resources while guaranteeing systems’ performance. To make more realistic sense and achieve the object, we introduce the following general assumptions:
Assumption A1.
The reference output signal is bounded and continuous. Besides, its derivative is also continuous and bounded from the first-order to the n-order .
Assumption A2.
For the bias faults and the health factor in actuator faults, they are time-varying and bounded functions. And there exists unknown positive constants and such that and hold.
Moreover, we introduce the following definition and lemmas
Definition 1.
Based on the definition in graph theory, by utilizing , it expresses the i-th agent synchronization error
2.3. Transform Function
To ensure systems’ transient and steady-state performance, the following prescribed performance function is given
where and are the initial value and the final value of the prescribed performance function , respectively. And is a gradual decay function that satisfies and . And the prescribed performances are performed as with and being the lower and upper performance bounds of error , and both of them satisfying the form of function .
Furthermore, the convergence speed is taken into account, and the following scaling function is introduced
where T is the settling time that can be prescribed, and is the positive parameter.
Thus, the following function can be obtained
It can be known that , . The existing positive parameter such that and , and the transform function can be deducted as follows
It can be seen that is a continuous function that .
Remark 1.
By introducing the scaling function (6), the prescribed time control can be achieved while the error constraints are not violated. Moreover, both the settling time and convergence range can be preset, which is independent of systems’ initial condition and positive design parameters.
Lemma 1
([16]). For any z satisfying with , the following result holds
2.4. Radial Basis Function Neural Networks (RBFNNs)
Without the ordinary approximation capabilities, RBFNNs can be utilized to approximate any unknown continuous functions. Then, the following Lemma holds:
Lemma 2
([13]). Let be a continuous function with defined on a compact set , by utilizing RBFNNs, existing positive constant satisfies
where and represent the radial basis function vector and the weight vector, respectively, and is the node number of RBFNNs. Then can denote as
where and are the Gaussian function’s width and center, respectively.
There exists the optimal weight vector that
Based on the above analysis, one has
where is the approximation error such .
3. Consensus Controller Design and Systems Stability Analysis
3.1. Consensus Control Design
In this section, RBFNNs and adaptive control are applied to construct the prescribed time consensus control method. Combined with (8), the following coordinate transformation can be given
where denotes the virtual control signal and will be given late.
Defining the auxiliary function as
Step 1: By utilizing the auxiliary function, the first step of the asymmetric Lyapunov function is selected as
where is positive parameter, and is the estimation value of the unknown parameter , and the estimation error is . And will be given late. Noting that the parameters and satisfy and , respectively. And such similar inequalities hold later.
Remark 2.
By applying the auxiliary function (15), such an asymmetric Lyapunov function is selected to achieve the asymmetric constraints. Moreover, combined with the transform function, the asymmetric performance can be guaranteed when the asymmetric Lyapunov function is bounded by the constructed control method. Noting that such a way is applied in each step, it brings systems to a more flexible and controllable performance.
According to (16), it can be obtained that
where .
Defining such a function
where .
Applying Lemma 2, it can be appreciated by the RBFNNs as follows
where is the approximation error and satisfies with .
According to Young’s inequality, the following inequalities can be obtained
where are the design parameters.
Based on the above inequalities, defining , , then (18) becomes
The virtual control signal and the adaptive law are developed as
where are the design parameters.
Thus, the following result holds
Step n : By utilizing the barrier Lyapunov function, the auxiliary Lyapunov function is selected as
where is the positive parameter, then is the estimation value of the unknown parameter , and the estimation error is . And will be given late.
Defining such a function
where .
Applying Lemma 2, it can be appreciated by the RBFNNs as follows
where is the approximation error and satisfies with .
According to Young’s inequality, one obtains:
where are the design parameters.
Define and , then (29) become
The virtual control signal and the adaptive law are developed as
where are the design parameters.
Thus, the following result holds
Step m: When the systems are subject to actuator faults, to achieve the prescribed time synchronization under a guaranteed performance, the information transmission and frequent update is inevitable. To avoid continuous communication and save communication resources simultaneously, the ASETC is constructed, and the following triggered threshold is established as
where are the design parameters. is the design switching condition. And and denote the latest triggered time and the next triggered time. Then, the measurement error is given as , where the triggered control signal is proposed as follows
where and with are the positive design parameters.
Remark 3.
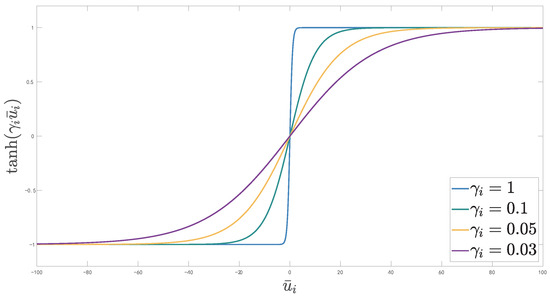
To further alleviate the communication pressure while systems’ performance is guaranteed, an ASETC is constructed based on a modified hyperbolic tangent function as . When the input signal is smaller, such as , the relative threshold strategy is chosen so that control performance can be guaranteed without taking up too many resources. When the input signal is large, such as , the triggered threshold is constructed based on a modified hyperbolic tangent function. By selecting the suitable modified parameter , as shown in Figure 1, which depicts the changing tendencies of the modified hyperbolic tangent function while the input signal and the coefficient change, a more reasonable trigger threshold can be obtained. Therefore, the balance between systems’ performance and the network resources can be accomplished.
Figure 1.
The modified hyperbolic tangent function diagram.
When , the following result holds,
From [48], holds for . Thus, the following inequality can be obtained
When , the following result holds
Thus, the can be rewrote as
where with .
Analogously, the following inequality can be obtained
By utilizing the barrier Lyapunov function, the auxiliary Lyapunov function is selected as
where and are the positive parameters, and are the estimation value of the unknown parameters and . Then estimation errors are and . , and will be given late.
Defining such a function
where .
By applying Lemma 2, it can be appreciated by the RBFNNs as follows
where is the approximation error and satisfies with .
By utilizing Young’s inequality, the following result holds
where and are the positive parameters.
Considering the health factor parameter is unknown and time-varying, it causes control design to be difficult. Thus, defining and , is used to estimate compensation as .
According to the above discussion, it is true that
Defining and , then (48) becomes
The virtual control signal and adaptive laws and are developed as
where are the design parameters.
Thus, the following result holds
According to Lemma 1 and Young’s inequality, the following inequalities can be obtained
According to the above inequalities, the following result is deduced
where , .
3.2. Systems Stability Analysis
Theorem 1.
If multiagent systems (1) suffered from actuator faults (2) and satisfy Assumptions 1 and 2, by utilizing developed controllers (24), (35), and (54), adaptive laws (25), (36), (55), and (56), and triggered scheme (38) and (39), while the initial system conditions and inputs are bounded, the following results are achieved:
- (1)
- All the system signals of multiagent systems subject to time-varying actuator faults are bounded. The error of each agent can be a guaranteed prescribed time convergence into a preset range under the given performance;
- (2)
- The Zeno behavior is surely eliminated in the proposed triggered scheme.
Proof of Theorem 1
([16,44]). (1) Consider the total function , and its derivative is
where and .
Integrating the above result, one has
where .
According to the definition of the Lyapunov function, the following result holds
Thus, the solution can be obtained as follows
According to the coordinate transformation, the following result can be deduced
From (66) and (67), it can be known that and are all bounded. According to the above discussion, it can be further known that and are bounded, then the control signals , , and are all bounded, .
Based on the definition, it can be confirmed that systems’ performance is guaranteed as , and the error converges to the prescribed areas in the prescribed time T.
Remark 4.
Based on the above derivation and discussion, it can be confirmed that the convergence speed can be adjusted by choosing the parameter , then the concrete value of can be adjusted by selecting the positive design parameters , , , and , . However, the upper bound of both the convergence range and settling time T are unaffected by them, which can be preset directly.
(2) Based on (38), it can be seen that and , and the following inequality holds
where .
According to (38), the existing positive parameter satisfies
Subsequently, it follows that
Therefore, the Zeno behavior can be surely avoided by the constructed scheme.
□
Combining with the aforementioned graph theory, Figure 2 illustrates the directed communication topology graph of a class of nonlinear multiagent systems. Letter d denotes the virtual leader, and numbers 1, 2, 3, and 4 represent the agents 1, 2, 3, and 4, respectively. All of them stand for nodes in graph theory. Furthermore, the arrow could express the relationship of the information expressing the direction of each nodes. The number between the virtual leader and the i-th agent is the weighted adjacency , while the i-th agent can receive information from the virtual leader, otherwise . The number between between the i-th agent and the j-th agent is the coefficient , while the j-th agent can receive information from the i-th agent, otherwise . The number between each node is the in-degree of the node that the arrow is pointing to.
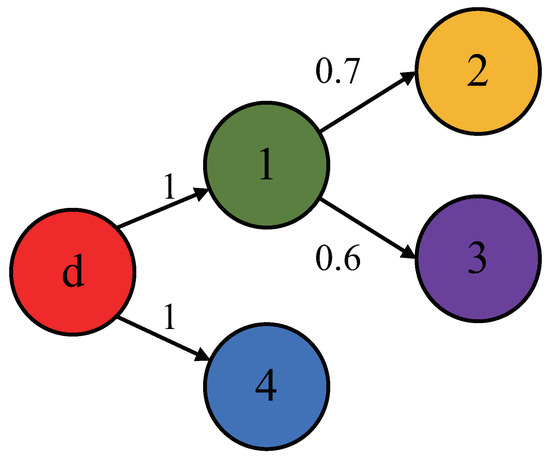
Figure 2.
The directed communication topology.
4. Simulation
In this section, to demonstrate the feasibility and effectiveness of the developed theoretical result, some experiment examples are presented. And a class of nonlinear multiagent systems under a communication graph are shown in Figure 2 is considered.
Remark 5.
There are two simulation examples presented in this section, including the numerical example and the application one. The simulations carried out on the numerical examples could distinctly perform the effect that the proposed control strategy exerted on universal application scenarios. On the foundation of this, the application example is implemented, which focuses more on the concrete and certain models and solves practical problems. By combining the aforementioned two examples, the feasibility and the effectiveness of the proposed control protocol could be well performed and verified in various scenarios.
4.1. Numerical Example
Focusing on the uncertain multiagent systems, they consist of four agents and one virtual leader, as presented in Figure 2, the i-th agent can be modeled as the following nonlinear systems, and its dynamics can be given by
where are the unknown nonlinear functions, and are chosen as . And the virtual leader’s output is given as . For symmetric constraints, the correlation functions are selected as
The actuator faults are considered in the example; assume that the actuators encounter faults during system convergence and the specific conditions are selected as
And selecting other parameters as , , and . Besides, the parameters of ASETC are given as . Table 1 presents the remaining positive design parameters of the controller and initial states of the systems.

Table 1.
The systems parameters and the initial states in the numerical example.
The simulation results of the numerical example in case I are presented in Figure 3. Figure 3a displays the output trajectory of the manipulated system that consists of one virtual leader and four agents. Figure 3b,c denotes the first-order error and the second-order error of the system, respectively. Figure 3d depicts the three kinds of control signals , and of each of the four agents.
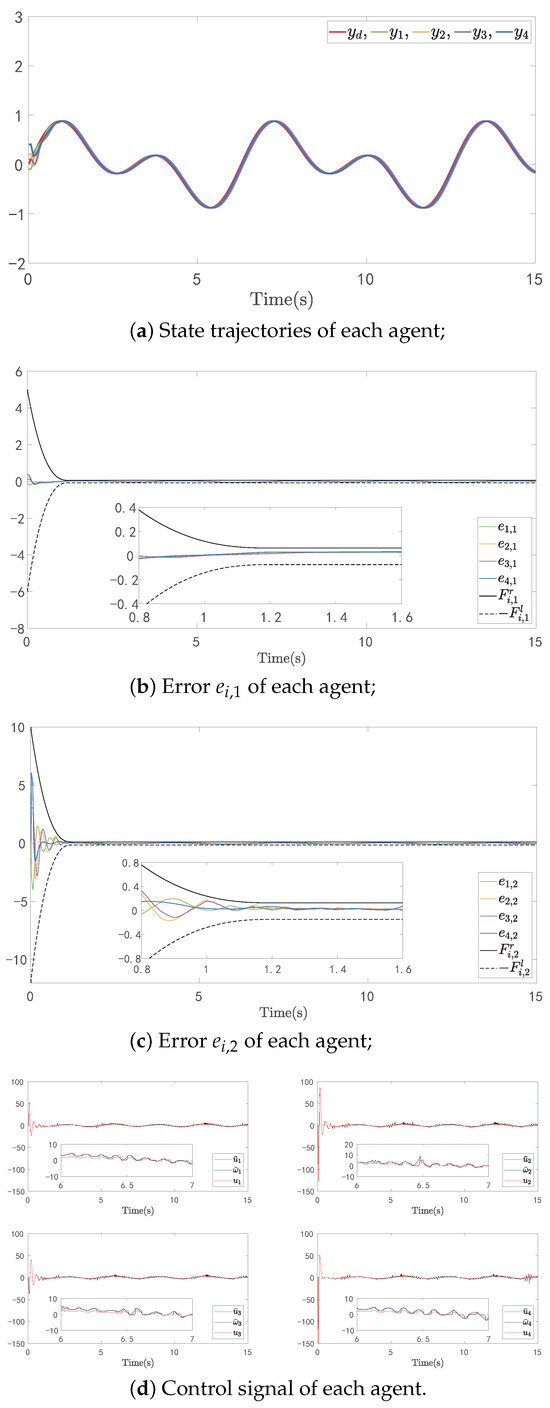
Figure 3.
The simulation results of the numerical example case I.
Figure 3a displays that the output consensus for the manipulated system is effectively achieved. According to Figure 3b,c, it is obvious that the errors converge to the given range within the prescribed time, and systems performance is guaranteed.
Figure 3d presents the control signal , and , showing the system has been subjected to the time-varying actuator faults, but it also shows the alleviation performance for those faults. Under the constructed prescribed time adaptive given performance compensation method, the triggered number of each agent for the three triggered schemes is shown in Table 2, it can clearly be seen that the proposed triggered scheme can save communication resource usage by more than 70% in this case. Compared with the other two methods, the developed scheme can save more network resources without affecting the performance.
Table 2.
Triggered number in the numerical example.
Table 1 shows the systems’ initial conditions of the three different cases implemented in the numerical example. Take as an example, the first row of this column means . The first element of the matrix represents the virtual leader’s initial position parameter, the second element denotes Agent 1’s initial position parameter, etc. The other columns stand for the different values of the variables of the system, whose meanings have been defined.
Table 2 illustrates the comparison of the triggered numbers among the scheme in [48], the switching scheme in [48], and the proposed ASETC in this manuscript, while selecting different parameters cases in the numerical simulation. Take Agent 1 as an example, the first row of this column denotes that Agent 1 has been triggered for 476 times in case I, etc.
To demonstrate the settling time of systems is unaffected by systems’ parameters and initial conditions, two more numerical examples under different systems’ parameters and initial states were also carried out. Furthermore, three kinds of system parameters and initial conditions are given in Table 1 and named after case I, case II, and case III, respectively. And the rest of the two experimental results of them are exhibited in Figure 4 and Figure 5, the triggered number of each agent is showed in Table 2. Based on those similar results in case II and case III, the effectiveness of the constructed control method is surely confirmed.
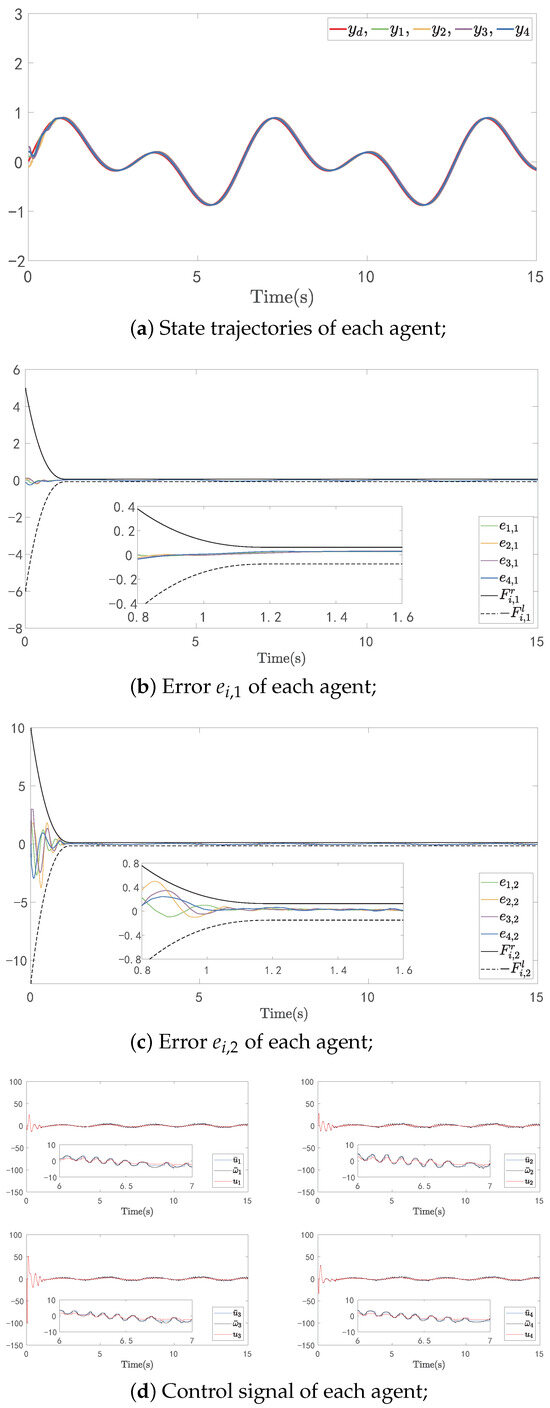
Figure 4.
The simulation results of numerical example case II.
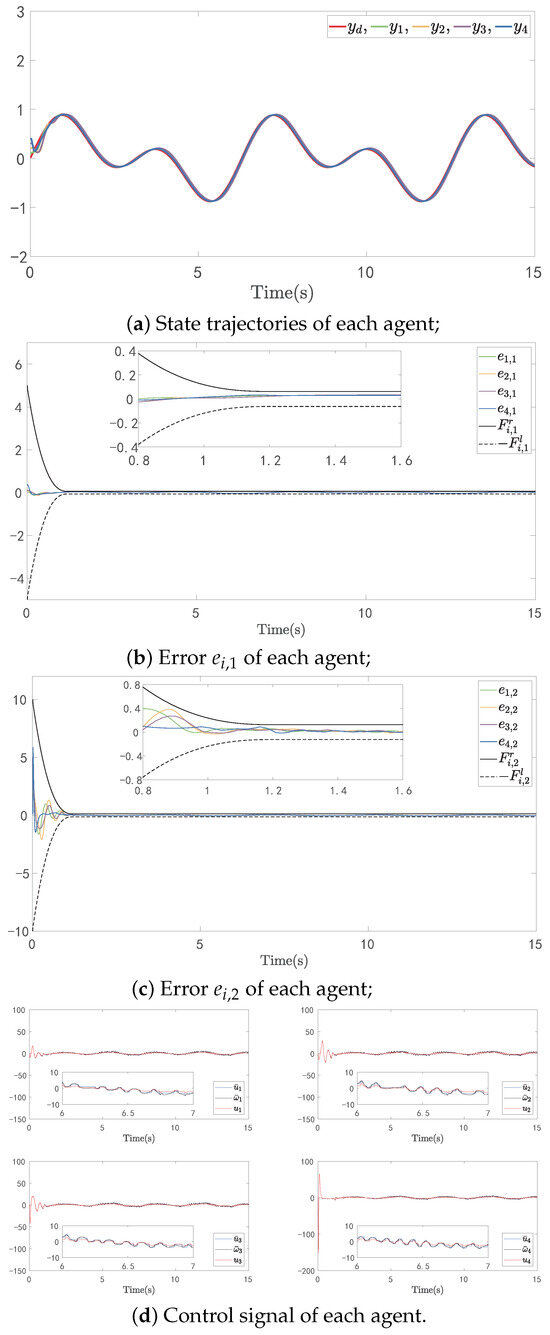
Figure 5.
The simulation results of numerical example case III.
4.2. Application Example
For further verification of the effectiveness of the proposed control scheme, the developed control method is implemented in single-link robotic arm systems subject to time-varying actuator faults, which are considered practical application scenarios whose dynamics can be provided as follows:
where is the angle of the i-th link, then and express the velocity and acceleration, respectively. Then, presents the total rotational inertias and is damping coefficient. represents the force of gravity. Then, expresses the i-th link length from the mass center to the link joint axis. By selecting the switching condition as , the other parameters remain the same.
Similar to Table 1, Table 3 shows systems’ initial conditions of the three different cases implemented in the application one.
Table 3.
The systems parameters and initial states in the application example.
Other things being equal, for asymmetric constraints, and functions are changed as
And the changing parameter as , . The designed parameters of the controller and initial states of the systems in the application example are presented in Table 2. The experiment results of the application example are presented in Figure 6. It can be seen from Figure 6a that four agents efficiently achieve the prescribed time consensus, showing excellent consensus accuracy for the manipulated system. Figure 6b,c exhibits an error convergence under the prescribed performance in a given settling time, and it can be seen that the convergence performance is well-guaranteed as the errors are rigorously limited in the given region. The control signals under the actuator faults are performed in Figure 6d, showing that the system has been subjected to the time-varying actuator faults, but it also shows the alleviation performance for those faults. Similar to the above numerical example, the triggered number for the three schemes of each agent is shown in Table 4, with a minimum value of 72% and a maximum value of 76% in this case, and the proposed scheme is still able to relax more network resources. Then, two experiment cases are performed ulteriorly for different systems’ parameters and different initial states, as presented in Table 3, and a similar control effect and triggered condition can be seen from Figure 7 and Figure 8 and Table 4. Thus, it can be concluded that the proposed prescribed time consensus method is effective.
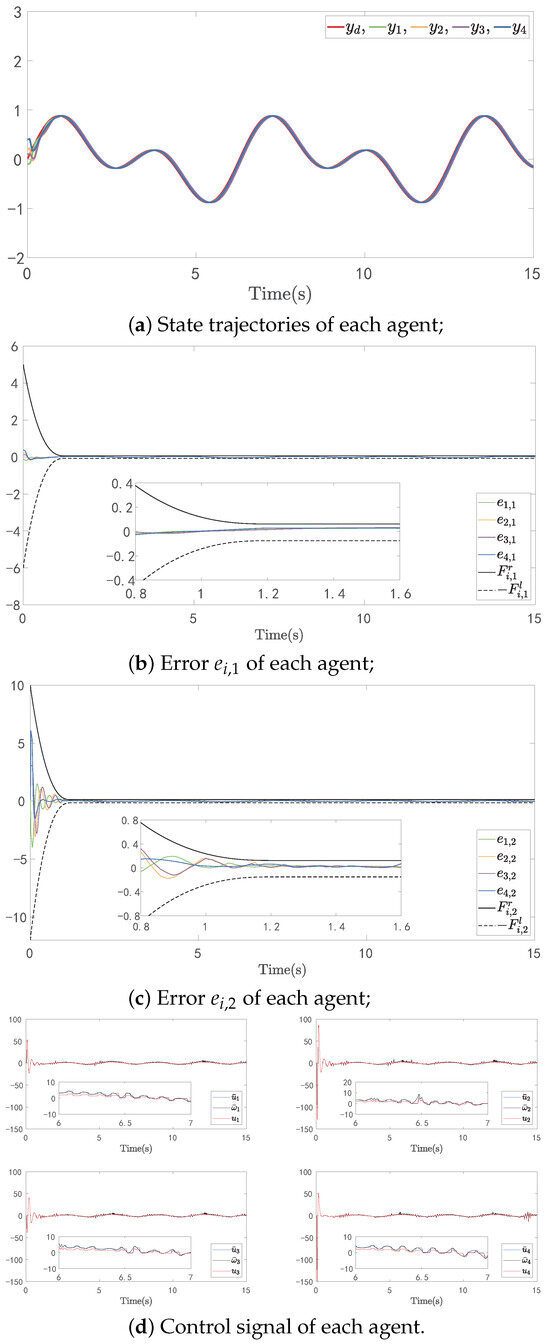
Figure 6.
The simulation results of the application example case I.
Table 4.
Trigger number in the application example.
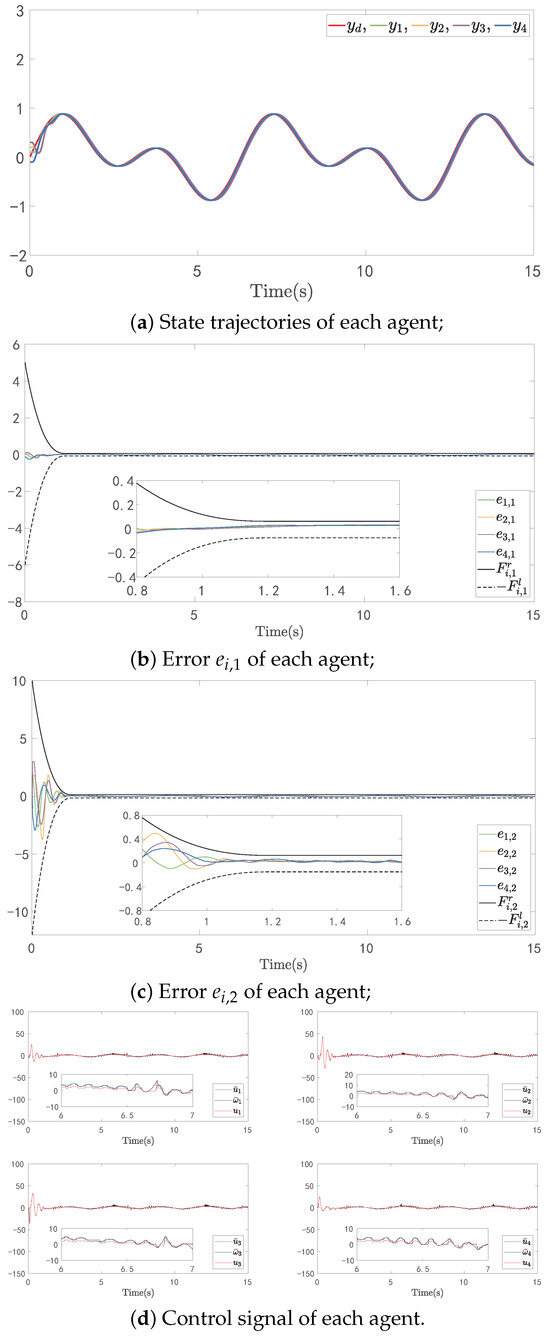
Figure 7.
The simulation results of the application example case II.
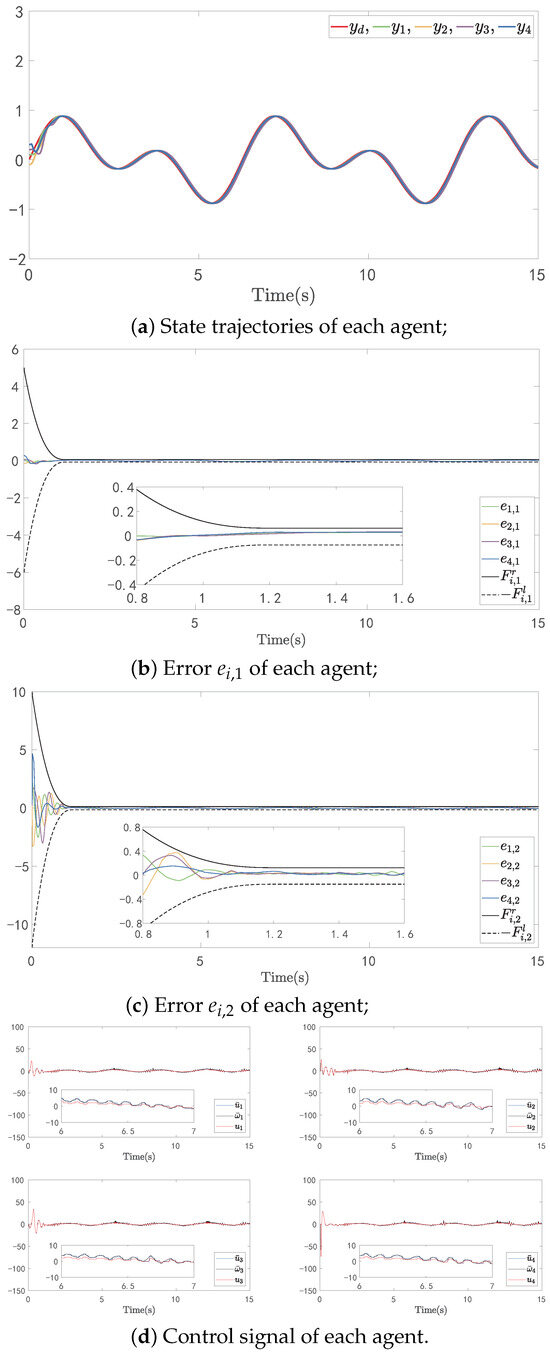
Figure 8.
The simulation results of the application example case III.
Similar to Table 2, Table 4 also illustrates the comparison of the triggered numbers among the scheme in [48], the switching scheme in [51], and the proposed ASETC in this manuscript, while selecting different parameters cases in the application simulation.
Remark 6.
The event-triggered scheme developed in [48] introduced a human-specified threshold variable to balance the requirements between the system performance and the limited network resources, which had fulfilled a dynamically triggered scheme switching. The scheme in [51] constructed a brand-new triggered mechanism consisting of two control signal-based items, one is the tanh function as and the other is the constant item, realizing scheme switching between the stationary and relative threshold. Furthermore, the proposed scheme utilizes a modified tanh function as to adaptively select a more reasonable scheme between the relative threshold and the modified tanh function-based threshold while the control signal is changing. Besides, Table 2 and Table 4 show the trigger numbers comparisons between the above three schemes in the numerical example and the application example, respectively.
5. Conclusions
This work focuses on the consensus problem of the prescribed time consensus control for multiagent systems subject to time-varying actuator faults. To solve the problem, a prescribed time adaptive compensate control method is proposed. By utilizing the backstepping technique, RBFNNs, a transform function, and an adaptive control are introduced to design the compensation strategy, which simultaneously restrains the time-varying actuator faults and guarantees systems’ convergence time. Moreover, taking error restraints into account, the asymmetric barrier Lyapunov function is introduced to ensure systems’ performance. To reduce the occupation of network resources while the performance is unaffected, a switching threshold-triggered scheme is developed. Some experiment examples are made to show the feasibility and effectiveness of the proposed control strategy in the prescribed time consensus problem of multiagent systems subject to time-varying actuator faults. In future work, how to cope with the time-delay input and time-varying deadzone problem in the consensus process and the application of the proposed method to the practical system are of interest to us.
Author Contributions
Conceptualization, K.C. and X.W.; methodology, K.C. and Y.G.; software, H.L. and X.Z.; writing—original draft preparation, K.C. and Y.G.; writing—review and editing, X.W. and Z.Z.; supervision, X.Z. and H.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the National Natural Science Foundation of China under Grant 62103115 and 52075108, in part of the Science and Technology Research Program of Guangzhou under Grant 2024A04J9895, in part by the Special projects in key fields of colleges and universities in Guangdong Province under Grant 2022ZDZX1070, in part by the Characteristic innovation projects of colleges and universities in Guangdong Province under Grant 2022KTSCX299 and in part of the Special Funds for the Cultivation of Guangdong College Student’s Scientific and the Technological Innovation under Grant pdjh2024a297.
Data Availability Statement
All relevant data are within the paper.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Tang, Y.; Zhang, D.; Shi, P.; Zhang, W.; Qian, F. Event-Based Formation Control for Nonlinear Multiagent Systems Under DoS Attacks. IEEE Trans. Autom. Control 2021, 66, 452–459. [Google Scholar] [CrossRef]
- Zou, W.; Shi, P.; Xiang, Z.; Shi, Y. Consensus Tracking Control of Switched Stochastic Nonlinear Multiagent Systems via Event-Triggered Strategy. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1036–1045. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, L.; Sun, Y.; Huang, T. Containment Control of Semi-Markovian Multiagent Systems with Switching Topologies. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3889–3899. [Google Scholar] [CrossRef]
- Ma, Q.; Xu, S. Consensusability of First-Order Multiagent Systems under Distributed PID Controller with Time Delay. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 7908–7912. [Google Scholar] [CrossRef]
- Lu, M.; Liu, L. Consensus of Heterogeneous Second-Order Nonlinear Uncertain Multiagent Systems under Switching Networks. IEEE Trans. Autom. Control 2021, 66, 3331–3338. [Google Scholar] [CrossRef]
- Li, X.; Shi, P.; Wang, Y.; Wang, S. Cooperative Tracking Control of Heterogeneous Mixed-Order Multiagent Systems with Higher-Order Nonlinear Dynamics. IEEE Trans. Cybern. 2020, 52, 5498–5507. [Google Scholar] [CrossRef]
- Ma, Q.; Meng, Q.; Xu, S. Distributed Optimization for Uncertain High-Order Nonlinear Multiagent Systems via Dynamic Gain Approach. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4351–4357. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Li, Y.; Chen, C.; Liu, Z.; Li, F. Prescribed time fuzzy adaptive consensus control for multiagent systems with dead-zone input and sensor faults. IEEE Trans. Autom. Sci. Eng. 2023. [Google Scholar] [CrossRef]
- Yang, H.; Luo, H.; Kaynak, O.; Yin, S. Adaptive SMO-Based Fault Estimation for Markov Jump Systems with Simultaneous Additive and Multiplicative Actuator Faults. IEEE Syst. J. 2021, 15, 607–616. [Google Scholar] [CrossRef]
- Ren, Y.; Zhao, Z.; Ahn, C.K.; Li, H.X. Adaptive Fuzzy Control for an Uncertain Axially Moving Slung-Load Cable System of a Hovering Helicopter with Actuator Fault. IEEE Trans. Fuzzy Syst. 2022, 30, 4915–4925. [Google Scholar] [CrossRef]
- Cai, Y.; Zhang, H.; Li, W.; Mu, Y.; He, Q. Distributed Bipartite Adaptive Event-Triggered Fault-Tolerant Consensus Tracking for Linear Multiagent Systems Under Actuator Faults. IEEE Trans. Cybern. 2021, 52, 11313–11324. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wu, J.; Zhan, X.; Han, T.; Yan, H. Distributed Adaptive Predefined-Time Bipartite Containment Algorithm for Nonlinear Multi-Agent Systems with Actuator Faults. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 2141–2145. [Google Scholar] [CrossRef]
- Wu, W.; Li, Y.; Tong, S. Neural Network Output-Feedback Consensus Fault-Tolerant Control for Nonlinear Multiagent Systems with Intermittent Actuator Faults. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 4728–4740. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Li, Y.; Wu, Y.; Liu, Z.; Chen, K.; Chen, C. Fixed-Time Formation Control for Uncertain Nonlinear Multiagent Systems with Time-Varying Actuator Failures. IEEE Trans. Fuzzy Syst. 2024, 32, 1965–1977. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Cui, L.; Wang, Y.; Liang, M.; Chai, Y. Tracking control of state constrained fractional order nonlinear systems. ISA Trans. 2021, 123, 240–250. [Google Scholar] [CrossRef] [PubMed]
- Tang, L.; Zhang, X.; Liu, Y.; Tong, S. Neural-Network-Based Adaptive Constrained Control for Switched Systems under State-Dependent Switching Law. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 4057–4067. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, C.; Chen, C.L.P.; Liu, Z.; Zhang, C. Fast Finite-Time Event-Triggered Consensus Control for Uncertain Nonlinear Multiagent Systems with Full-State Constraints. IEEE Trans. Circuits Syst. Regul. Pap. 2023, 70, 1361–1370. [Google Scholar] [CrossRef]
- Guo, G.; Gao, Z.; Dong, K. Prescribed-time formation control of surface vessels with asymmetric constraints on LOS range and bearing angles. Nonlinear Dyn. 2021, 104, 3701–3712. [Google Scholar] [CrossRef]
- Naderolasli, A.; Shojaei, K.; Chatraei, A. Platoon formation control of autonomous underwater vehicles under LOS range and orientation angles constraints. Ocean Eng. 2023, 271, 113674. [Google Scholar] [CrossRef]
- Fang, X.; Fan, H.; Liu, L.; Wang, B. Adaptive fixed-time fault-tolerant control of saturated MIMO nonlinear systems with time-varying state constrains. Nonlinear Dyn. 2022, 110, 3463–3483. [Google Scholar] [CrossRef]
- Sun, W.; Wang, L.; Wu, Y. Adaptive Dynamic Surface Fuzzy Control for State Constrained Time-Delay Nonlinear Nonstrict Feedback Systems with Unknown Control Directions. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7423–7434. [Google Scholar] [CrossRef]
- Wang, N.; Wang, Y.; Wen, G.; Lv, M.; Zhang, F. Fuzzy Adaptive Constrained Consensus Tracking of High-Order Multi-agent Networks: A New Event-Triggered Mechanism. IEEE Trans. Syst. Man Cybern. Syst 2022, 52, 5468–5480. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, J.; Yan, H.; Wang, Y. Event-triggered adaptive finite-time control for nonlinear systems under asymmetric time-varying state constraints. Front. Inf. Technol. Electron. Eng. 2021, 22, 1610–1624. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, J.; Zhang, Z.; Wu, Y. Output feedback control of nonlinear cascaded systems with external disturbance and asymmetric constraints. Nonlinear Dyn. 2022, 108, 3727–3743. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.; Zuo, Z.Y.; Li, X.; Lu, R. An Overview of Finite/Fixed-Time Control and its Application in Engineering Systems. IEEE/CAA J. Autom. Sin. 2022, 9, 2106–2120. [Google Scholar] [CrossRef]
- Wang, F.; Chen, B.; Sun, Y.; Gao, Y.; Lin, C. Finite-Time Fuzzy Control of Stochastic Nonlinear Systems. IEEE Trans. Cybern. 2020, 50, 2617–2626. [Google Scholar] [CrossRef]
- Bafghi, H.F.; Jahed-Motlagh, M.R.; Abooee, A.; Moarefianpur, A. Robust finite-time tracking for a square fully actuated class of nonlinear systems. Nonlinear Dyn. 2021, 103, 1611–1625. [Google Scholar] [CrossRef]
- Qi, W.; Gao, M.; Ahn, C.K.; Cao, J.; Cheng, J.; Zhang, L. Quantized Fuzzy Finite-Time Control for Nonlinear Semi-Markov Switching Systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 2622–2626. [Google Scholar] [CrossRef]
- Wang, D.; Liu, C.L.; Ding, D.; Gao, S.; Chu, M.H. Finite-time optimal tracking control using augmented error system method. Appl. Math. Comput. 2022, 424, 127013. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, F.; Liu, Z.; Zhang, Y.; Chen, C.L.P. Fixed-Time Fuzzy Control for a Class of Nonlinear Systems. IEEE Trans. Cybern. 2020, 52, 3880–3887. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, S.; Yan, Y. Fixed-time velocity-free sliding mode tracking control for marine surface vessels with uncertainties and unknown actuator faults. Ocean Eng. 2020, 201, 107107. [Google Scholar] [CrossRef]
- Cai, Y.; Zhang, H.; Zhang, J.; Wang, W. Fixed-time leader-following/containment consensus for a class of nonlinear multi-agent systems. Inf. Sci. 2021, 555, 58–84. [Google Scholar] [CrossRef]
- Li, D.; Ge, S.S.; heng Lee, T. Fixed-Time-Synchronized Consensus Control of Multiagent Systems. IEEE Trans. Control Network Syst. 2021, 8, 89–98. [Google Scholar] [CrossRef]
- Wu, W.; Tong, S. Fixed-Time Adaptive Fuzzy Containment Dynamic Surface Control for Nonlinear Multiagent Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 5237–5248. [Google Scholar] [CrossRef]
- Wang, J.; Wang, C.; Liu, Z.; Chen, C.; Zhang, C. Practical Fixed-Time Adaptive ERBFNNs Event-Triggered Control for Uncertain Nonlinear Systems with Dead-Zone Constraint. IEEE Syst. Man CY.-S. 2024, 54, 342–351. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, X.; Ge, S.S. Prescribed-time control with explicit reference governor for a class of constrained cascaded systems. Int. J. Robust Nonlinear Control 2021, 31, 6422–6437. [Google Scholar] [CrossRef]
- Liu, D.; Liu, Z.; Chen, C.L.P.; Zhang, Y. Prescribed-time containment control with prescribed performance for uncertain nonlinear multi-agent systems. J. Frankl. Inst. 2021, 358, 1782–1811. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, S.; Guo, F.; Zhao, X.; Zhang, F. Prescribed time attitude containment control for satellite cluster with bounded disturbances. ISA Trans. 2022, 137, 160–174. [Google Scholar] [CrossRef]
- Chen, X.; Yu, H.; Hao, F. Prescribed-Time Event-Triggered Bipartite Consensus of Multiagent Systems. IEEE Trans. Cybern. 2020, 52, 2589–2598. [Google Scholar] [CrossRef]
- Wang, Y.; Song, Y.; Hill, D.J.; Krstić, M. Prescribed-Time Consensus and Containment Control of Networked Multiagent Systems. IEEE Trans. Cybern. 2019, 49, 1138–1147. [Google Scholar] [CrossRef]
- Gong, X.; Cui, Y.; Wang, T.; Shen, J.; Huang, T. Distributed Prescribed-Time Consensus Observer for High-Order Integrator Multi-Agent Systems on Directed Graphs. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2216–2220. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, H.; Yu, Z.; Zhao, F. Distributed Optimization of Single-Integrator Systems with Prescribed-Time Convergence. IEEE Syst. J. 2023, 17, 3235–3245. [Google Scholar] [CrossRef]
- Zhao, N.-N.; Ouyang, X.Y.; Wu, L.; Shi, F. Event-triggered adaptive prescribed performance control of uncertain nonlinear systems with unknown control directions. ISA Trans. 2020, 108, 121–130. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Che, W.; Deng, C.; Wu, Z. Prescribed Performance Control for Multiagent Systems via Fuzzy Adaptive Event-Triggered Strategy. IEEE Trans. Fuzzy Syst. 2022, 30, 5078–5090. [Google Scholar] [CrossRef]
- Wang, J.; Yan, Y.; Liu, J.; Chen, C.L.P.; Liu, Z.; Zhang, C. NN event-triggered finite-time consensus control for uncertain nonlinear Multi-Agent Systems with dead-zone input and actuator failures. ISA Trans. 2023, 137, 59–73. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Li, Y.; Tong, S.; Hou, Z. Event-Triggered Adaptive Fuzzy Asymptotic Tracking Control of Nonlinear Pure-Feedback Systems with Prescribed Performance. IEEE Trans. Cybern. 2021, 53, 2380–2390. [Google Scholar] [CrossRef]
- Li, T.; Li, S. Fixed-time adaptive dynamic event-triggered control of flexible-joint robots with prescribed performance and time delays. ISA Trans. 2023, 140, 198–223. [Google Scholar] [CrossRef]
- Shao, X.; Ye, D. Event-based adaptive fuzzy fixed-time control for nonlinear interconnected systems with non-affine nonlinear faults. Fuzzy Sets Syst. 2021, 432, 1–27. [Google Scholar] [CrossRef]
- Pang, N.; Wang, X.; Wang, Z. Event-Triggered Adaptive Control of Nonlinear Systems with Dynamic Uncertainties: The Switching Threshold Case. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3540–3544. [Google Scholar] [CrossRef]
- Zeng, Q.; Zhao, J. Adaptive Switching Event-Triggered Control for Active Suspension Systems with Acceleration Performance Constraint. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8028–8037. [Google Scholar] [CrossRef]
- Li, J.; Liu, C.; Sun, Y.; Shao, L. A new event-triggered adaptive tracking controller for nonlinear systems with unknown virtual control coefficients. Eur. J. Control 2022, 69, 100759. [Google Scholar] [CrossRef]
- Wang, J.; Gong, Q.; Huang, K.; Liu, Z.; Chen, C.; Liu, J. Event-triggered prescribed settling time consensus compensation control for a class of uncertain nonlinear systems with actuator failures. IEEE Trans. Neural Networks Learn. Syst. 2023, 34, 5590–5600. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).