To genuinely incorporate confidence into the encoding of entities and relations, while fully capturing both structural and semantic information, the CosUKG framework is proposed. Firstly, an overview of the CosUKG framework is provided, followed by the motivation behind its proposal in
Section 4.2. Subsequently, in
Section 4.3, the principles of embedding confidence in CosUKG and reflecting structural and semantic information are elucidated.
Section 4.4 describes the training process of the framework, concluding with the method for inferring confidence of unobserved triples.
4.1. Overview of the CosUKG Framework
The CosUKG framework consists of three modules, initialization, training, and evaluation, as shown in
Figure 2. The initialization module is responsible for reading positive samples, generating negative samples, selecting models, and generating embedding vectors. Model selection aims to choose an appropriate model, which includes pre-defined scoring functions suitable for UKG. The embedding vector generation is responsible for initializing the embedding vectors and updating and storing intermediate vectors.
The training module consists of two functionalities: score computation and loss optimization. Score computation involves using the model’s scoring function to calculate the scores of positive and negative samples. Then, through loss optimization, an appropriate loss function is selected to optimize the embedding vectors. The results are passed to the embedding vector generation module, and this process iterates until reaching the maximum number of iterations. The choice of loss function should correspond to the selected model.
Finally, the evaluation module assesses the trained model parameters and learned embedding vectors. It analyzes the embedding performance of CosUKG through two tasks: confidence prediction and relation fact classification.
4.2. Motivation behind the CosUKG
From the analysis of
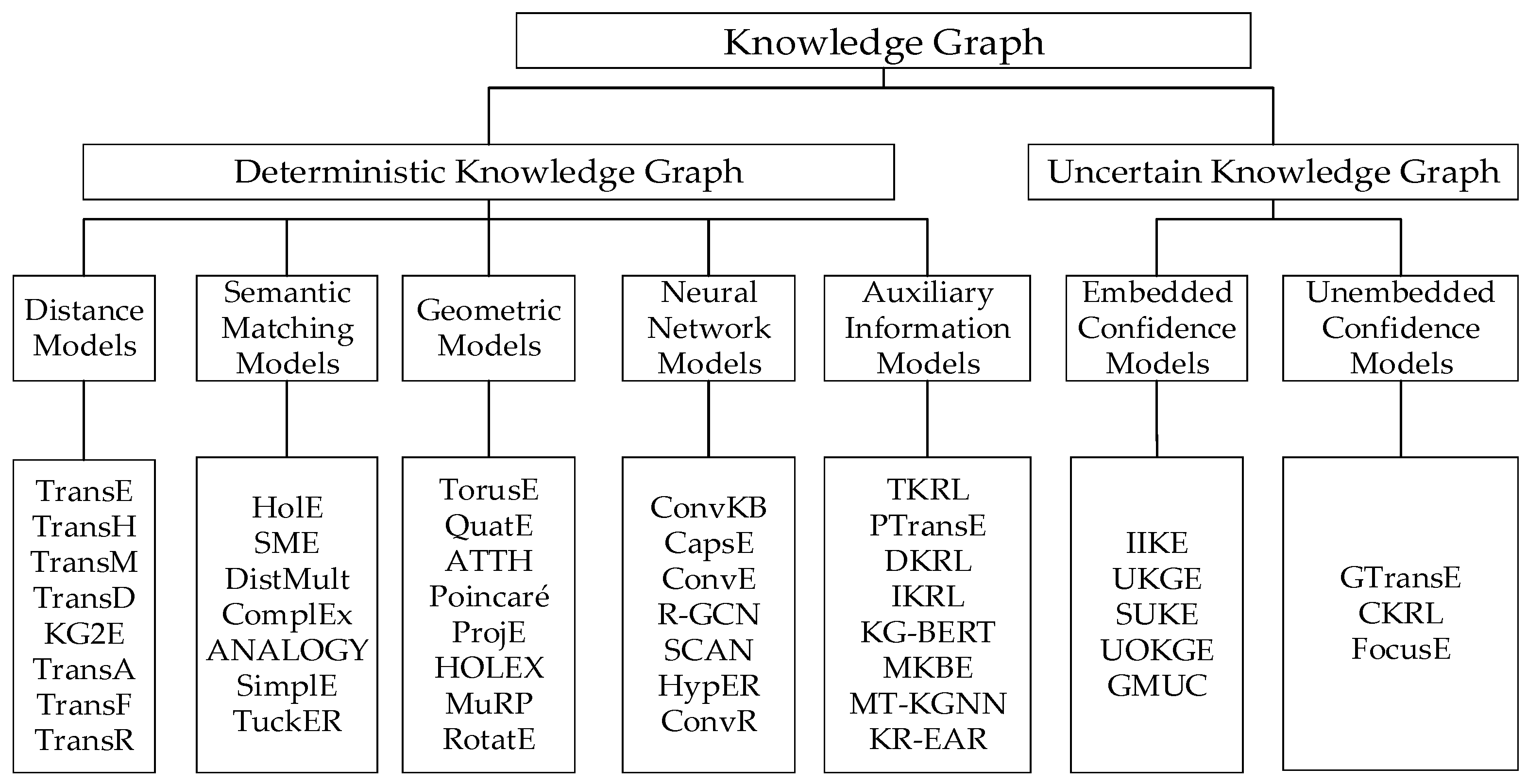
Section 2, it can be seen that a large amount of research work proposes deterministic knowledge graph representation learning models, all aiming to bring the head entity as close as possible to the tail entity through transformation. In deterministic knowledge graph representation learning, each relational fact is deterministic, and, during representation learning, for each deterministic relational fact, the smaller the value of its scoring function, the better, ideally being 0.
As shown in
Figure 3, taking TransE as an example, it is desirable that
, that is,
, which is the ideal result. However, in reality, it is often difficult to achieve; that is, there is usually a gap between the transformed vector
and the true
. Assuming an offset angle o represents this distance, the smaller the offset angle, the closer
is to the target vector
. When
,
, which means
. In other words, for a deterministic relational fact
, the cosine similarity between
and
is 1. If the distance between
and
increases, the offset angle
will also increase, and the cosine similarity will decrease. Furthermore, according to Definition 1, uncertain knowledge graphs assign a confidence to each relational fact
to represent uncertainty, with values ranging from 0 to 1. A higher confidence indicates a higher likelihood that the relational fact
is true, which is consistent with the change in cosine similarity values. Therefore, by modeling confidence using cosine similarity and incorporating them into the scoring function formula, uncertainty can be represented in the embedding vector space.
4.3. Embedding Confidence, Structural, and Semantic Information
It is natural to model confidence information using the offset angle
between vectors. When the confidence is 1,
, meaning the offset angle from the transformed vector
to the target vector
is 0, which results in
. When the confidence is 0,
and
are significantly different, indicating an offset angle of greater than or equal to 90 degrees from
to
. Therefore, the confidence
, which is based on the well-known cosine of the angle equation and is the reason why the proposed model framework is named CosUKG. The general scoring function is designed as Equation (1):
The embedding of structural and semantic information is primarily reflected in the transformation process from the head entity to the tail entity, which determines how
is derived. There are multiple choices for this process, such as the simple TransE model where the transformed vector
, and the scoring function is defined as:
The TransE model performs well only in handling one-to-one relationships. It tends to make errors when dealing with one-to-many, many-to-one, and many-to-many relationships. This limitation also applies to CosUKG, restricting it to handling only one-to-one uncertain relational facts. To improve upon this, one may choose the TransH, TransR, or TransD models, which all utilize the relation
to project or transform
. In summary,
, where
represents matrix multiplication with respect to
. The scoring function can be represented by Equation (3):
The TransX series models excel in modeling one-to-many, many-to-one, and many-to-many relationships. If we select Equation (3) as the scoring function, CosUKG can handle uncertain relational facts of types including one-to-many, many-to-one, and many-to-many.
Compared to the TransX series models, the RotatE model can better embed structural and semantic information, where
, with
representing Hadamard (or element-wise) product. The scoring function is defined by Equation (4):
The RotatE model accurately handles relationships of one-to-one, one-to-many, many-to-one, and many-to-many types, and this capability extends to CosUKG. Therefore, when using Equation (4), CosUKG can model uncertain relational facts of types including one-to-one, one-to-many, many-to-one, and many-to-many.
Similarly, this framework can fully leverage existing research achievements in deterministic knowledge graphs, particularly distance models. This ensures the quality of the embeddings with minimal increase in model complexity.
4.4. Framework Training
The choice of loss function and negative sample generation method are two crucial aspects in model training. The selection of the loss function depends on the generation method. For example, TransE utilizes a margin-based ranking loss function, represented by Equation (5) in the CosUKG framework. On the other hand, RotatE employs a negative sampling loss function, represented by Equation (6) in the CosUKG framework. In the equations,
denotes the sampling probability of negative samples, which is used as the weight for negative samples.
represents the set of negative samples, which includes quadruples that do not exist in
and is defined as
.
A simple uniform distribution of negative samples with zero confidences cannot be used during the training process. Therefore, a new negative sample generation strategy has been designed for CosUKG. Specifically, for a quadruple , if , negative samples are generated, where the value range of is ; if , negative samples are generated, where the value range of is ; and, if , negative samples are generated. and are hyperparameters, where , and they need to be adjusted during the training process. The negative sample generation process is described in Algorithm 1. Compared to using a uniform distribution, this negative sampling strategy is more nuanced, capable of generating a greater number of genuine negative samples. By enhancing the contribution of negative sample scores to the loss function, it aids the model in learning more about the structure and semantic features of the knowledge graph.
The computational complexity of Algorithm 1 mainly lies in detecting whether the generated negative samples are true negative samples, i.e., filtering out the samples that already exist in
. Assuming that the time required for one detection operation is
, the time complexity of generating
negative samples is
.
| Algorithm 1 The Process of Generating Negative Samples |
| , negative sampling size . |
| 1: | if : |
| 2: | |
| 3: | else if : |
| 4: |
|
| 5: | else: |
| 6: |
|
| 7: | End if |
| Output:
|
The model training process is illustrated in Algorithm 2. During each iteration,
quadruples are sampled from the training set.
negative samples are generated for each quadruple, and the scores of both positive and negative samples are calculated. Then, the loss is computed using either Equation (5) or Equation (6), and the embedding vectors of entities and relations are updated based on the gradients. Assuming that the time required to compute the scores of positive and negative samples is
, and the time to compute the loss value is
, the time consumption for processing one batch of samples is
. The time complexity for
iterations is
.
| Algorithm 2 The Training Process of CosUKG |
| , scoring function f, batch size B, negative sampling size n, margin , iterations step, etc. |
| 1: | Initialize entity embedding vectors and relation embedding vectors. |
| 2: | |
| 3: | do |
| 4: | using Algorithm 1. |
| 5: | and |
| 6: | Update embedding parameters based on gradients using Equation (5) or Equation (6). |
| 7: | End for |
| 8: | Repeat steps 2 to 7 until the maximum number of iterations step is reached. |
| Output: Learned relation and entity embedding vectors. |
4.5. Inference of Confidence for Unobserved Relation Facts
In the UKGE, SUKE, and BEUrRE models, probability soft logic is introduced to calculate the confidence of unobserved facts. Although these models have achieved good results, the logical rules and weights are manually determined without considering the uncertainty of these rules and weights. This approach is somewhat inconsistent with objective facts and has certain limitations. In this paper, we propose to model uncertainty information using the cosine similarity of vector angles and leverage the transitivity of angles to make reasonable inferences about the confidence of unobserved facts.
For example, consider a logical rule defined as
with a length of 3, where
,
, and
represent entities and relations, respectively. Taking the TransE model as an example, in the CosUKG framework, the geometric interpretation of this rule is shown in
Figure 4.
In this case, we have
,
,
. According to Equation (2), we can calculate
,
, and
, as shown in
Figure 4a. Then, based on the transitivity of angles and vector arithmetic rules, we obtain
Figure 4b, which represents the confidence of the unobserved fact
as
.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}