Abstract
In this paper, we investigate the time M-fractional modified nonlinear Schrödinger equation that describes the propagation of rogue waves in deep water. Periodic, solitary, and kink (or anti-kink) wave solutions are discussed using the bifurcation theory for planar integrable systems. Some new wave solutions are constructed using the first integral for the traveling wave system. The degeneracy of the obtained solutions is investigated by using the transition between orbits. We visually explore some of the solutions using graphical representations for different values of the fractional order.
Keywords:
Schrödinger equation; soliton solution; bifurcation analysis; phase space; fractional derivatives MSC:
35J10; 35C08; 35C07; 34F10; 76B15
1. Introduction
Fractional differential equations is a a branch of mathematics with many applications. It provides more flexibility in modeling physical phenomena [1,2,3,4,5]. In this paper, the fractional nonlinear Schrödinger differential equation is used model rogue waves. These are defined as high amplitude waves with height greater than double the significant wave height of the background sea. Rogue waves appear in the deep ocean, in the atmosphere, in optics, in plasma, and in other settings [6]. The study of these waves falls within an active area of research, namely the study of nonlinear partial deferential Equations (NLPDEs), e.g., [7,8,9,10,11,12,13,14,15,16,17,18]. Within this wider field, one finds studies addressing the physical properties of waves in oceans. These studies include the study of surface tide, internal tides, and deep-water waves [19,20,21,22]. Within the latter studies, rogue waves have become a topic of intense research. These waves were examined as solutions of the nonlinear Schrödinger equation in (1 + 1) and (2 + 1) dimensions [23]. The nonlinear rogue wave dynamics in the case of unidirectional wave propagation was studied in [24]. The phase-resolved numerical simulations based on a high-order spectral (HOS) method was used to study the occurrence and dynamics of rogue waves in three-dimensional deep water [25]. For water waves, the nonlinear Schrödinger Equation (NLS) and its modifications were used to model the behavior of the waves in deep water condition [26,27,28,29,30,31]. Exact solutions of the Schrödinger equation were constructed using the bifurcation theory of dynamical systems [32,33].
Deep-water irrational gravity waves propagating at the surface of an inviscid incompressible fluid are governed to the third order in amplitude by an equation first introduced by Zakharov [26]
where denotes the complex conjugate, is Krasitskii’s kernel [34], is the dispersion relation for gravitational waves, g is the acceleration due to the gravity, and are phase frequencies. The modified nonlinear Schrödinger equation was derived in detail in [28] and has the form
where is the hydrodynamic potential, is a complex amplitude and are the frequency and wave number of the carrier wave, respectively. Introducing new variable x in the form
where is the coefficient of the surface tension. Inserting the transformation (3) into Equation (2), and assuming , we obtain
where are constants introduced for notational convenience and given by
Previously, Equation (4) appeared frequently in the literature. In [29], the authors used the method to obtain analytical solutions and studied the rogue wave’s amplitude to highlight their destructive power. In [30], the authors utilized both the method and extended Sinh-Gordon equation expansion to construct analytical solutions that are expressed using trigonometric and hyperbolic functions and solitary solutions.
In the current work, we study Equation (4) with time M-fractional fractional order taking the form
where the operator is the time M-fractional operator of order defined in Appendix A. Equation (5) is a generalization for Equation (4) since the latter can be obtained as a special case when . Equation (4) has many uses in ocean engineering [26,28,34].
To the extent of the authors’ knowledge, the study of the M-time fractional modified nonlinear Schrödinger equation in (5) has not been considered in the literature. This motivated the authors to study the dynamical behaviour of Equation (5) using bifurcation theory and to construct some wave solutions to this equation. We also studied the influence of the fractional order on the obtained solutions and examined the dependence of the solutions on the initial conditions.
This paper is structured as follows: Section 2 contains the mathematical analysis covering the conversion of Equation (5) into a traveling wave system using some wave transformation. Section 3 is devoted to bifurcation and phase portrait analysis of the solutions. In Section 4, we discuss the obtained solution in some details. Finally, in Section 5, we provide 3D- graphical representations and illustrate the effect of the fractional order on the solutions. Finally, Section 6 gives a summary of the obtained result.
2. Traveling Wave System
We look for wave solutions for Equation (5) in the form
where
where are free constants characterizing the soliton amplitude, soliton velocity, phase constant, frequency, and wave number, respectively, while is a real valued function. Direct calculations give
Inserting the expressions (8) into Equation (5) and dividing by then taking real and imaginary parts, we obtain:
From the real part
From the imaginary part, after dividing by
Integrating Equation (10) with respect to , and setting the integration constant to zero, we obtain
The two Equations (9) and (11) are identical if
which is equivalent to
Thus, with the values given in (12), both Equations (9) and (11) reduce to
where are two constants given by
Equation (13) is equivalent to the following planar system, referred to in the literature as traveling wave system.
The system (15) is a conservative Hamiltonian system since and can be obtained form the Hamiltonian
through Hamilton’s canonical equations. Since , the Hamiltonian (16) is a first integral (total energy), for the system (15), i.e.,
where is a constant, determined from the initial conditions. The constant plays a significant role in the the remainder of this study. Since H is constant, the Hamiltonian system (15) is a one dimensional integrable system. Thus, its solution can be obtained by quadrature utilizing the first integral (17), and the problem of finding the solution for Equation (5) is equivalent to the problem of finding the solution for the particle motion described by the Hamiltonian (16). Inserting the first expression in Equation (15) in the first integral (17) and separating the variables, we obtain
where
3. Bifurcation and Phase Portrait Analysis
To integrate both sides of Equation (18), we need to specify the range of the three parameters , and . Usually, one of two methods can be employed to find this range. The first is the complete discriminate system for the polynomial [35], which has been applied in previous research, e.g., [36]. The second is bifurcation analysis [37,38]. Bifurcation analysis has been applied successfully by various researchers, e.g., [39,40,41,42,43,44,45,46,47]. Its use gives all possible solutions and classifies these solutions by the type of orbit. It also clarifies the dependence of the solutions on the initial conditions. With these advantages in mind we chose to study the system (15) using bifurcation analysis.
To study the bifurcation and investigate the phase portrait for the system (15), we start by finding the fixed points. These are , where is a zero of the function . If , the system (15) has as the only fixed point. If it has three fixed points, . The determinant of the Jacobian matrix for the Hamiltonian system (15) at the fixed point has the form
Exploring the qualitative theory for the planar integrable system [37,38], the fixed point is either a center if , a saddle if , or a cusp if and its Poincaré index is zero. Evaluating the determinant of the Jacobi matrix (20) at the fixed points , we obtain
Furthermore, the values of the parameter at the fixed points are
In analyzing the behavior of the solution, we consider the two following cases:
- (a)
- If , the Hamiltonian system (15) has a single fixed point which is either a saddle when and , or a center if and . The phase portraits for both cases are shown in Figure 1. For , Figure 1a shows the phase plane containing two unbounded families of orbits in green for and in blue for with the two families being separated by unbounded orbits corresponding in red. The phase portrait for , is shown in Figure 1b. There is only one bounded family of periodic orbits, in green, for about the center point . Note that when , the family of periodic orbits approaches the fixed point .
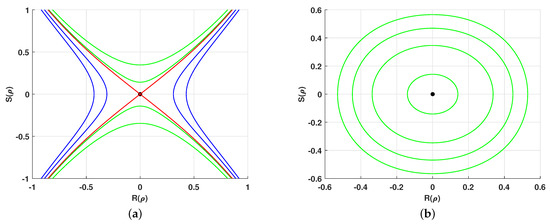 Figure 1. Phase portrait of system (15) in the case that for different values of . (a) ; (b) .
Figure 1. Phase portrait of system (15) in the case that for different values of . (a) ; (b) . - (b)
- If , the Hamilton system (15) has three fixed points . If and , the fixed point is a saddle while are centers. In this case we have three kinds of level sets for H. For there are two homoclinic orbit connecting the saddle point to itself, shown in blue in Figure 2a. For we obtain two periodic orbits each containing one of the centers and and contained in an oval of the homoclinic orbits, as shown in red in Figure 2a. Finally, for we obtain a super periodic orbit surrounding the level set as shown in green. Notice, when , the super-periodic family of orbits in green approaches the homoclinic orbit in blue, while the two periodic families of red orbits either approaches the homoclinic orbit in blue when , or shrinks to the two fixed points when .
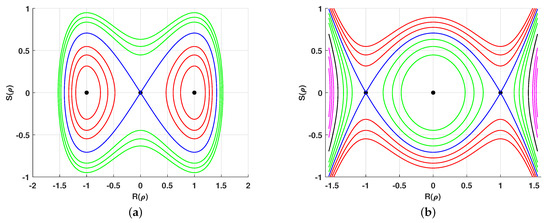 Figure 2. Phase portrait of system (15) in the case that for different values of . (a) ; (b) .
Figure 2. Phase portrait of system (15) in the case that for different values of . (a) ; (b) .
If, on the other hand, and , then is a center while are saddle points. In this case, we have five families of curves. For , we have two families of unbounded orbits shown in red in Figure 2b. For , we have a heteroclinic orbit connecting the two saddle points and as shown in blue. For , we obtain two unbounded orbits and a periodic orbit surrounding the center and contained in the heteroclinic orbits of the case as shown in green. The periodic orbits for shrink to the center as . For , we obtain two unbounded orbits and the stationary point , shown in black. Finally for , we obtain two unbounded orbits as shown in purple. It is should be noted that as , the family of periodic orbits in green shrinks to the fixed point and approach the heteroclinic orbit in blue when approaches . Furthermore, when , the unbounded orbits in red will approach the heteroclinic orbit in blue.
The study of the transition between the phase orbits discussed above has two significant uses. The first is that it enables us to examine the dependence of the solutions on the initial conditions through the parameter which is determined by the initial conditions. The second is that it allows the construction the solution of the limiting phase orbit by a limiting process.
4. Solutions
In this section, we construct some wave solution for Equation (5) in the form Equation (6) by integrating both sides of the differential form (18) using the bifurcation restrictions on the parameters. We restrict ourselves to finding wave solutions corresponding to bounded orbits.
4.1. Periodic Solutions
The periodic wave solutions for Equation (5) are constructed by integrating the one differential forms along periodic phase orbits. Thus, we have the following cases:
- (a)
- (b)
- For fixed values of , the system (15) has a super periodic orbit crossing axis in exactly two points. Therefore, we write , where . Assuming and integrating both sides of Equation (18), we obtainInserting the last expression for in (6), we obtain
- (c)
- (d)
- For values of the system (5) has a periodic orbit in addition to unbounded orbit as shown in green in Figure 2b. This shows that the polynomial has four real zeros, that we denote , where . Thus, we can write . Assuming and which corresponds to the periodic orbit contained in the heteroclinic orbit and integrating both sides of Equation (18) we obtain
4.2. Soliton Solution
The existence of a homoclinic phase orbit for the system (15) shows the presence of solitary wave solutions for Equation (5). System (15) has a homoclinic orbit if , and as shown in Figure 2a in blue. This orbits intersect axis in three points and thus the polynomial has two simple roots, that we denote , where and one double root at the origin. Thus, . Assuming , and that , and integrating both sides of Equation (18), we obtain
Using the transformation (6), we obtain a one-soliton solution for Equation (5) in the form
This solution corresponds to the right oval of the homoclinic orbit. With a similar procedure, we can obtain the solitary solution corresponding to the left oval.
4.3. Kink Solution
If , the system (15) has a heteroclinic orbit shown in blue in Figure 2b. The existence of such orbits indicates the presence of kink (or anti-kink) solutions. This orbit crosses axis twice, and so the polynomial has two double roots which are the coordinate of the two saddle points . Therefore, . Assuming , and considering the values , we obtain on integrating both sides of Equation (18) that
Utilizing the transformation (6) and the above expression, we obtain a kink solution for Equation (5) in the form
4.4. Degeneracy Property
The present subsection aims to study the degeneracy of the solutions using the transition between the phase orbits. Clearly, each orbit in the phase space corresponds to a certain initial condition which determines the constant . Hence, the study of the degeneracy of the solutions through the parameter is equivalent to studying the dependence of the solutions on the initial conditions. We consider the the following cases:
- (1)
- (2)
- (3)
- (4)
- (5)
It is worth mentioning that the study of the solution degeneracy through the transition of the phase orbits is significant because it shows the consistency of the obtained solution. It is also clarifies the dependence of the solutions on the initial conditions.
5. Graphical Representations
This section aims to give graphical representations of some obtained solutions and illustrate the effect of the fractional order on these solutions. In all the following figures, we take . We investigate the effect of the fractional order on the periodic, solitary, and kink solutions separately:
- (a)
Figure 3 illustrates graphically of the solution (24) with different values of the fractional derivative order . For corresponding to the classical case, is periodic as shown in Figure 3a. As the values of decreases from one, it loses its periodicity as shown in Figure 3b,c. Figure 3d gives the 2D representation of when showing that the amplitude of the solution remains approximately unchanged while the width of the solution grows as the fractional order decreases from one.
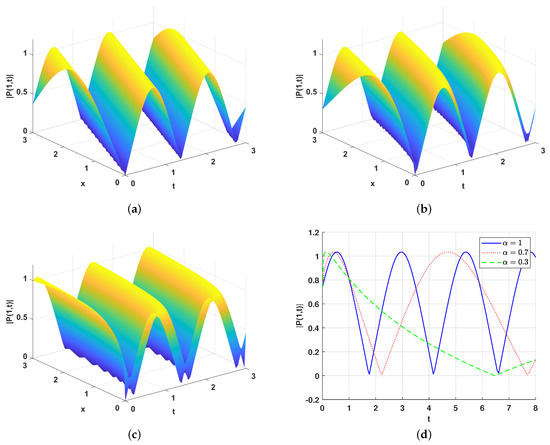
Figure 3.
Graphic representation of real part of the solution (33) , , with different values of . (a) 3D representation with ; (b) The 3D representation with ; (c) 3D representation with ; and (d) with different values of .
- (b)
Figure 4a–c show the 3D representations of for the solution (33) for distinct values of the fractional order . Figure 4d shows the amplitude of is approximately unaffected as decreases from one.
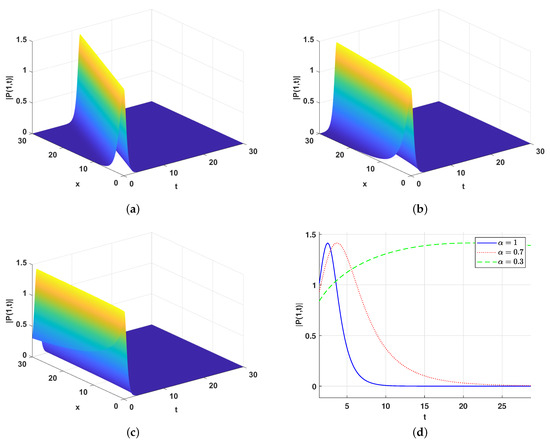
Figure 4.
Graphic representation of for the solution (33) when , , with different values of . (a) The 3D representation with ; (b) 3D representation with ; (c) 3D representation with ; and (d) with different values of .
- (c)
Figure 5a–c show for the solution (35) for several values of the fractional order derivative. Figure 5d shows the amplitude of is slowly increased with decreasing the order of the fractional order .
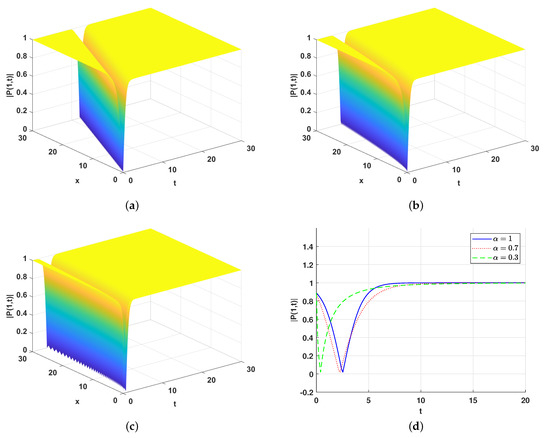
Figure 5.
Graphic representation of of the solution (35) , , with different values of . (a) The 3D representation with ; (b) 3D representation with ; (c) 3D representation with ; and (d) with different values of .
6. Conclusions
The present study investigated the time M- fractional modified nonlinear Schrödinger equation that characterizes the propagation of rogue waves in deep waters. A wave transformation was applied to Equation (5) to transform it into a traveling wave system which was shown to be a one-dimensional Hamiltonian system. The qualitative theory for the planar integrable systems was utilized to perform the bifurcation analysis and inspect the phase portrait. Based on the bifurcation constraints on the system parameters, we have utilized the first integral for the traveling wave system to construct some new wave solutions for Equation (5) which were categorized into periodic, super-periodic, solitary, and kink wave solutions. We studied the degeneracy of the obtained solutions using the transition between the phase orbits. We investigated the dependence of the solutions on the initial conditions. These solutions were shown graphically for different values of the fractional order . Figure 3 gives the 2D representation of given by (24) when and it shows that the amplitude of the solution remains approximately unchanged while the width of the solution grows as the fractional order decreases from one. Figure 4 shows the amplitude of given by (33) is approximately unaffected as decreases from one. Figure 5 shows the amplitude of given by (35) is slowly increased with decreasing order of the fractional order .
Author Contributions
Conceptualization, A.A. and M.A.N.; Methodology, M.A.N.; Software, A.A. and M.A.N.; Validation, A.A. and M.A.N.; Formal analysis, A.A. and M.A.N.; Writing—original draft, A.A. and M.A.N.; Writing—review & editing, A.A. and M.A.N.; Funding acquisition, A.A. The authors contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia through the project number INST143.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available from the author upon reasonable request.
Acknowledgments
The authors extend their appreciation to the Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia for funding this research work through the project number INST143.
Conflicts of Interest
The authors declare that they have no competing interests.
Appendix A. M-Fractional Derivative
The importance of fraction calculus stems from it great applicability in modeling natural phenomena. Different fractional integrals and derivatives have been defined [48]. Among these definitions the M- truncated fractional derivative was proposed in 2018 in [49].
Definition A1.
Let be a function. For each , the new truncated M- fractional derivative of function P of order α is
for all and , where is the truncated Mittag–Leffler function of one parameter, and Γ is the Gamma function [50].
If the above limit exists for a function P and , we say that P is -differentiable. We list some properties of the M-fractional derivatives in the following proposition. To simplify notations, we omitted the index j in the notation for .
Proposition A1.
Let , be two α-differentiable function at , and are scalars. The following are satisfied.
- 1.
- ,
- 2.
- .
- 3.
- 4.
- For any constant c,
- 5.
- If is α-differentiable, then .
References
- Klein, C.; Sparber, C.; Markowich, P. Numerical study of fractional nonlinear Schrödinger equations. Math. Probl. Eng. 2014, 470, 20140364. [Google Scholar] [CrossRef] [PubMed]
- Muslih, S.; Agrawal, O.; Baleanu, D. A Fractional Schrödinger Equation and Its Solution. Int. J. Theor. Phys. 2010, 49, 1746–1752. [Google Scholar] [CrossRef]
- Wang, S.; Xu, M. Generalized fractional Schrödinger equation with space-time fractional derivatives. J. Math. Phys. 2007, 48, 043502. [Google Scholar] [CrossRef]
- Dong, J.; Xu, M. Space–time fractional Schrödinger equation with time-independent potentials. J. Math. Anal. Appl. 2008, 344, 1005–1017. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Belić, M.R.; Zhong, W.; Zhang, Y.; Xiao, M. Propagation Dynamics of a Light Beam in a Fractional Schrö dinger Equation. Phys. Rev. Lett. 2015, 115, 180403. [Google Scholar] [CrossRef] [PubMed]
- Schober, C. Rogue Waves in Deep Water. In Nonlinear Physics; World Scientific Publishing Company: Singapore, 2003; pp. 295–301. [Google Scholar]
- Shi, L.; Tayebi, S.; Arqub, O.A.; Osman, M.; Agarwal, P.; Mahamoud, W.; Abdel-Aty, M.; Alhodaly, M. The novel cubic B-spline method for fractional Painlevé and Bagley-Trovik equations in the Caputo, Caputo-Fabrizio, and conformable fractional sense. Alex. Eng. J. 2023, 65, 413–426. [Google Scholar] [CrossRef]
- Yiasir Arafat, S.; Fatema, K.; Rayhanul Islam, S.; Islam, M.; Ali Akbar, M.; Osman, M. The mathematical and wave profile analysis of the Maccari system in nonlinear physical phenomena. Opt. Quantum Electron. 2023, 55, 136. [Google Scholar] [CrossRef]
- Arqub, O.A.; Osman, M.S.; Park, C.; Lee, J.R.; Alsulami, H.; Alhodaly, M. Development of the reproducing kernel Hilbert space algorithm for numerical pointwise solution of the time-fractional nonlocal reaction-diffusion equation. Alex. Eng. J. 2022, 61, 10539–10550. [Google Scholar] [CrossRef]
- Bulut, H.; Sulaiman, T.A.; Demirdag, B. Dynamics of soliton solutions in the chiral nonlinear Schrödinger equations. Nonlinear Dyn. 2018, 91, 1985–1991. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Q.; Yan, S. A hybrid model for simulating rogue waves in random seas on a large temporal and spatial scale. J. Comput. Phys. 2016, 313, 279–309. [Google Scholar] [CrossRef]
- Asghar, A.; Seadawy, A. Dispersive soliton solutions for shallow water wave system and modified Benjamin-Bona-Mahony equations via applications of mathematical methods. J. Ocean Eng. Sci. 2021, 6, 85–98. [Google Scholar]
- Al Nuwairan, M.; Chaabelasri, E. Balanced Meshless Method for Numerical Simulation of Pollutant Transport by ShallowWater Flow over Irregular Bed: Application in the Strait of Gibraltar. Appl. Sci. 2022, 12, 6849. [Google Scholar] [CrossRef]
- Christiansen, P.; Sørensen, M.P.; Scott, A.C. Nonlinear Science at the Dawn of the 21st Century; Lecture Notes in Physics; Springer: Berlin/Heidelberg, Germany, 2000; Volume 542. [Google Scholar]
- Alabedalhadi, M.; Shqair, M.; Al-Omari, S.; Al-Smadi, M. Traveling Wave Solutions for Complex Space-Time Fractional Kundu-Eckhaus Equation. Mathematics 2023, 11, 404. [Google Scholar] [CrossRef]
- Yu, W.; Liu, W.; Triki, H.; Zhou, Q.; Biswas, A. Phase shift, oscillation and collision of the anti-dark solitons for the (3+1)-dimensional coupled nonlinear Schrödinger equation in an optical fiber communication system. Nonlinear Dyn. 2019, 97, 1253–1262. [Google Scholar] [CrossRef]
- Rabie, W.; Ahmed, H.; Hamdy, W. Exploration of New Optical Solitons in Magneto-Optical Waveguide with Coupled System of Nonlinear Biswas–Milovic Equation via Kudryashov’s Law Using Extended F-Expansion Method. Mathematics 2023, 11, 300. [Google Scholar] [CrossRef]
- Aderyani, S.; Saadati, R.; O’Regan, D.; Alshammari, F. Describing Water Wave Propagation Using the G′/G2—Expansion Method. Mathematics 2023, 11, 191. [Google Scholar] [CrossRef]
- Tchilibou, M.; Koch-Larrouy, A.; Barbot, S.; Lyard, F.; Morel, Y.; Jouanno, J.; Morrow, R. Internal tides off the Amazon shelf during two contrasted seasons: Interactions with background circulation and SSH imprints. Ocean Sci. 2022, 18, 1591–1618. [Google Scholar] [CrossRef]
- Scott, A. Encyclopedia of Nonlinear Science; Routledge, Taylor and Francis Group: New York, NY, USA, 2005. [Google Scholar]
- Ablowitz, M.; Segur, H. On the evolution of packets of water waves. J. Fluid Mech. 2006, 92, 691–715. [Google Scholar] [CrossRef]
- Dysthe, K.; Krogstad, H.; Müller, P. Oceanic Rogue Waves. Annu. Rev. Fluid Mech. 2008, 40, 287–310. [Google Scholar] [CrossRef]
- Osborne, A.R.; Onorato, M.; Serio, M. The nonlinear dynamics of rogue waves and holes in deep-water gravity wave trains. Phys. Lett. A 2000, 275, 386–393. [Google Scholar] [CrossRef]
- Osborne, A. The random and deterministic dynamics of ‘rogue waves’ in unidirectional, deep-water wave trains. Mar. Struct. 2001, 14, 275–293. [Google Scholar] [CrossRef]
- Xiao, W.; Liu, Y.; Wu, G.; Yue, D.K.P. Rogue wave occurrence and dynamics by direct simulations of nonlinear wave-field evolution. J. Fluid Mech. 2013, 720, 357–392. [Google Scholar] [CrossRef]
- Zakharov, V.E. Stability of periodic waves of finite amplitude on the surface of a deep fluid. J. Appl. Mech. Tech. Phys. 1968, 9, 190–194. [Google Scholar] [CrossRef]
- Dysthe, K.B. Note on a modification to the nonlinear Schrodinger equation for application to deep water waves. Proc. R. Soc. Loud. A 1979, 369, 105–114. [Google Scholar]
- Stiassnie, M. Note on the modified nonlinear Schrödinger equation for deep water waves. Wave Motion 1984, 6, 431–433. [Google Scholar] [CrossRef]
- Stéphane, A.; Augustin, D.; César, M. Extended (G’/G) Method Applied to the Modified Non-Linear Schrodinger Equation in the Case of Ocean Rogue Waves. Open J. Mar. Sci. 2014, 4, 246. [Google Scholar] [CrossRef]
- Bilal, M.; Younis, M.; Ur-Rehman, S.; Ahmad, J.; Younas, U. Investigation of new solitons and other solutions to the modified nonlinear Schrödinger equation in ocean engineering. J. Ocean. Eng. Sci. 2022, in press. [Google Scholar] [CrossRef]
- Chabchoub, A.; Kibler, B.; Finot, C.; Millot, G.; Onorato, M.; Dudley, J.; Babanin, A.V. The nonlinear Schrödinger equation and the propagation of weakly nonlinear waves in optical fibers and on the water surface. Ann. Phys. 2015, 361, 490–500. [Google Scholar] [CrossRef]
- Du, L.; Sun, Y.; Wu, D. Bifurcations and solutions for the generalized nonlinear Schrödinger equation. Phys. Lett. A 2019, 383, 126028. [Google Scholar] [CrossRef]
- Han, T.; Li, Z.; Zhang, X. Bifurcation and new exact traveling wave solutions to time-space coupled fractional nonlinear Schrödinger equation. Phys. Lett. A 2021, 395, 127217. [Google Scholar] [CrossRef]
- Krasitskii, V.P. On reduced equations in the Hamiltonian theory of weakly nonlinear surface waves. J. Fluid Mech. 1994, 272, 1–20. [Google Scholar] [CrossRef]
- Yang, L.; Hou, X.; Zeng, Z. A complete discrimination system for polynomials. Sci. China Ser. E 1996, 39, 628–646. [Google Scholar]
- AL Nuwairan, M. The exact solutions of the conformable time fractional version of the generalized Pochhammer–Chree equation. Math. Sci. 2022. [Google Scholar] [CrossRef]
- Nemytskii, V.V.; Stepanov, V.V. Qualitative Theory of Differential Equations; Princeton Mathematical Series, No. 22; Princeton University Press: Princeton, NJ, USA, 1960. [Google Scholar]
- Saha, A.; Banerjee, S. Dynamical Systems and Nonlinear Waves in Plasmas; CRC Press: Boca Raton, FL, USA, 2021; p. x+207. [Google Scholar]
- El-Dessoky, M.; Elmandouh, A. Qualitative analysis and wave propagation for Konopelchenko-Dubrovsky equation. Alex. Eng. J. 2023, 67, 525–535. [Google Scholar] [CrossRef]
- Elbrolosy, M.; Elmandouh, A.; Elmandouh, A. Construction of new traveling wave solutions for the (2+ 1) dimensional extended Kadomtsev-Petviashvili equation. J. Appl. Anal. Comput. 2022, 12, 533–550. [Google Scholar] [CrossRef] [PubMed]
- Elbrolosy, M.; Elmandouh, A. Dynamical behaviour of nondissipative double dispersive microstrain wave in the microstructured solids. Eur. Phys. J. Plus 2021, 136, 1–20. [Google Scholar] [CrossRef]
- Elmandouh, A. Integrability, qualitative analysis and the dynamics of wave solutions for Biswas–Milovic equation. Eur. Phys. J. Plus 2021, 136, 1–17. [Google Scholar] [CrossRef]
- Elbrolosy, M. Qualitative analysis and new soliton solutions for the coupled nonlinear Schrödinger type equations. Phys. Scr. 2021, 96, 125275. [Google Scholar] [CrossRef]
- Elmandouh, A.A.; Elbrolosy, M.E. New traveling wave solutions for Gilson–Pickering equation in plasma via bifurcation analysis and direct method. Math. Methods Appl. Sci. 2022. [Google Scholar] [CrossRef]
- Elbrolosy, M.; Elmandouh, A. Dynamical behaviour of conformable time-fractional coupled Konno-Oono equation in magnetic field. Math. Probl. Eng. 2022, 2022, 3157217. [Google Scholar] [CrossRef]
- Elmandouh, A.; Elbrolosy, M. Integrability, variational principal, bifurcation and new wave solutions for Ivancevic option pricing model. J. Math. 2022, 2022, 9354856. [Google Scholar] [CrossRef]
- AL Nuwairan, M.; Elmandouh, A. Qualitative analysis and wave propagation of the nonlinear model for low-pass electrical transmission lines. Phys. Scr 2021, 96, 095214. [Google Scholar] [CrossRef]
- Das, S. Functional Fractional Calculus; Springer: Berlin/Heidelberg, Germany, 2011; Volume 1. [Google Scholar]
- Sousa, J.; De Oliveiraa, E. New Truncated M-Fractional Derivative Type Unifying Some Fractional Derivative Types with Classical Properties. Int. J. Anal. Appl. 2018, 16, 83–96. [Google Scholar] [CrossRef]
- Artin, E. The Gamma Function; Library of Congress (English Translation): Washington, DC, USA, 1964. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).