



Improved Thrust Performance Optimization Method for UAVs Based on the Adaptive Margin Control Approach


Abstract
:1. Introduction
2. Dynamical Modeling and Problem Description
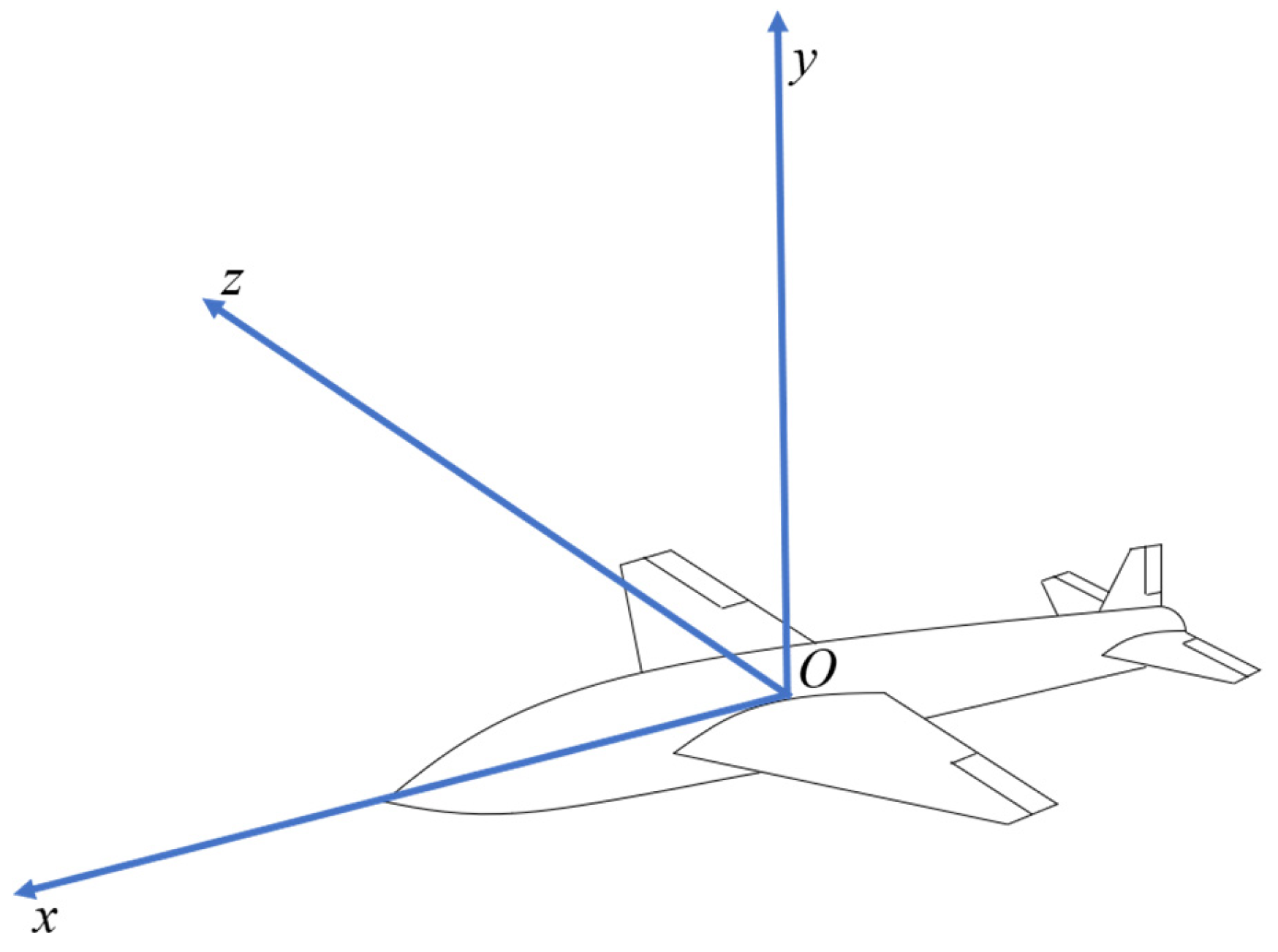
2.1. UAV Dynamics Modeling
2.1.1. UAV Modeling Assumptions
- The mass of the UAV does not change during flight for a short period of time.
- The UAV is an ideal rigid body, and the effects of aircraft elasticity are ignored.
- The UAV is affected only by the acceleration of gravity, and the curvature of the Earth is neglected.
- Since the UAV is symmetric about the plane, and .
- The change in the aircraft center of mass with fuel is neglected during the UAV.
2.1.2. Dynamics Equations
2.1.3. Kinematic Equations
2.2. UAV Turbofan Engine Modeling
- Ignore the effect of the Reynolds number variation on the characteristics of the engine components; ignore the effect of atmospheric humidity on the parameters of the thermodynamic properties of the gas; the effect of rotor inertia is considered.
- The flow of air in the engine is treated as quasi one-dimensional flow, i.e., the airflow parameters are considered to be the same in the same cross-section of the engine.
2.2.1. Inlet
2.2.2. Fan
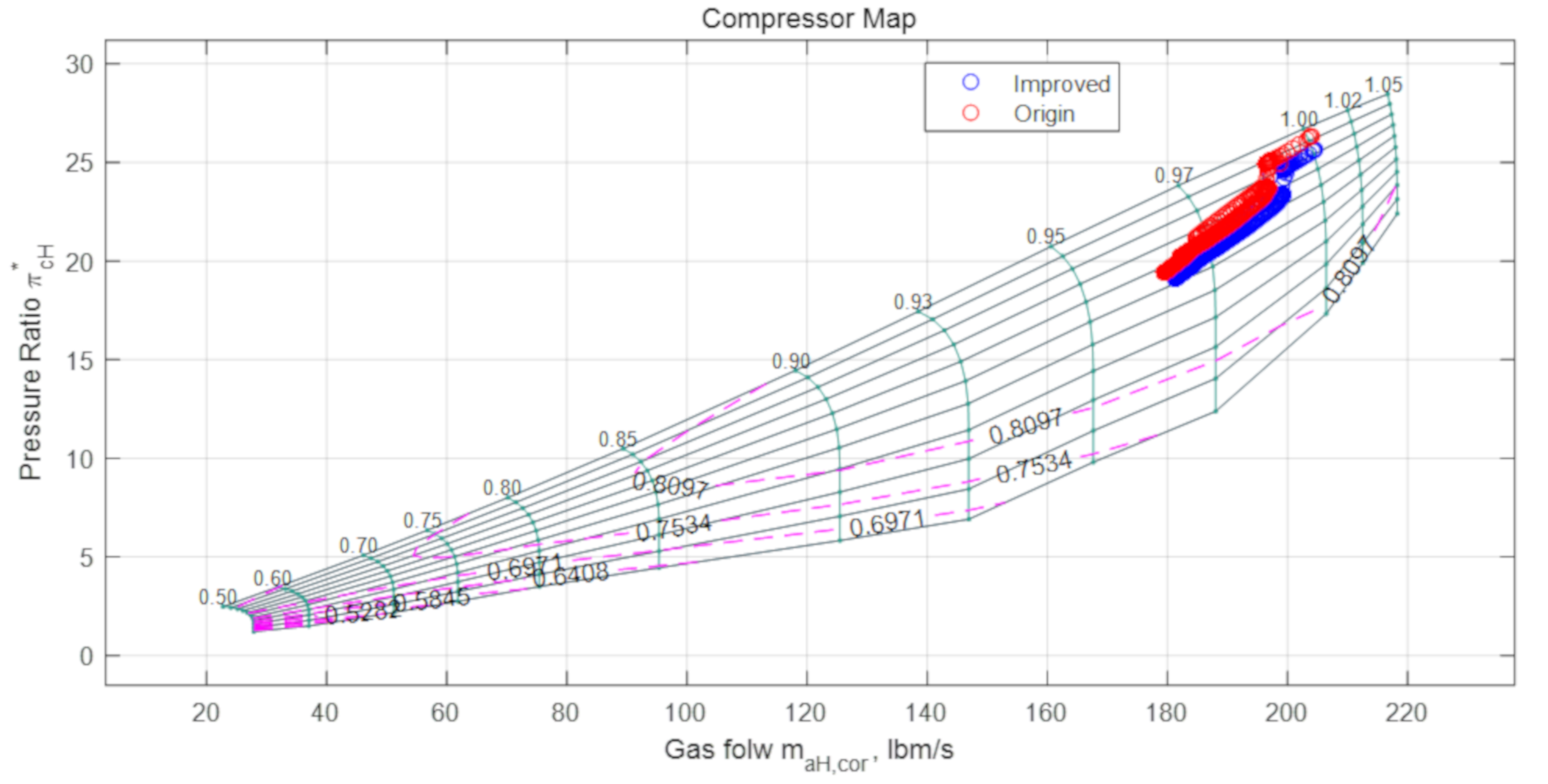
2.2.3. Compressor
2.2.4. Burner
2.2.5. High-Pressure Turbine (HPT) and Low-Pressure Turbine (LPT)
2.2.6. Mixer
2.2.7. Nozzle
2.3. Problem Description
3. Major Studies
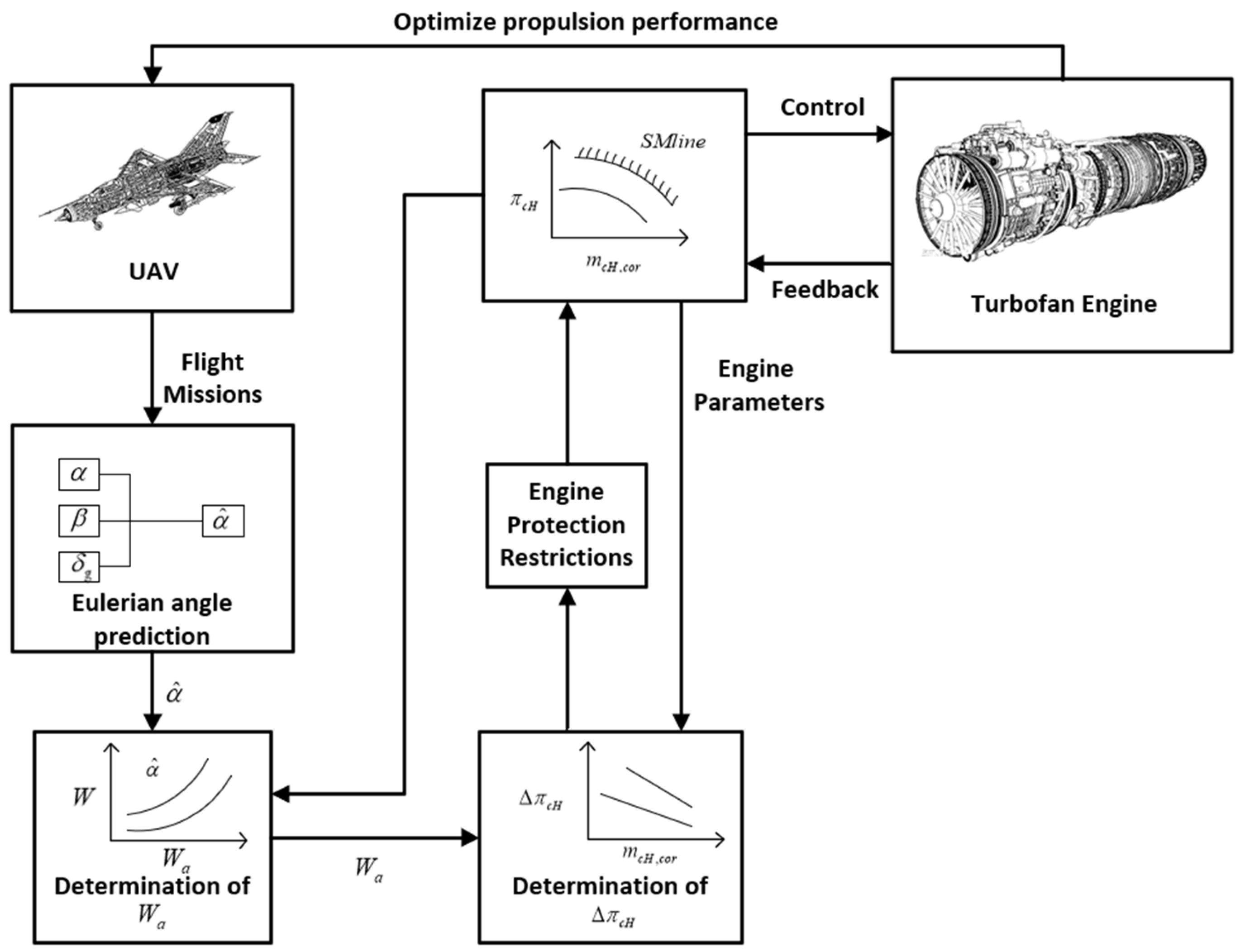
3.1. Thrust Optimization Based on the Adaptive Margin Model
3.1.1. Angle of Attack Prediction for UAV
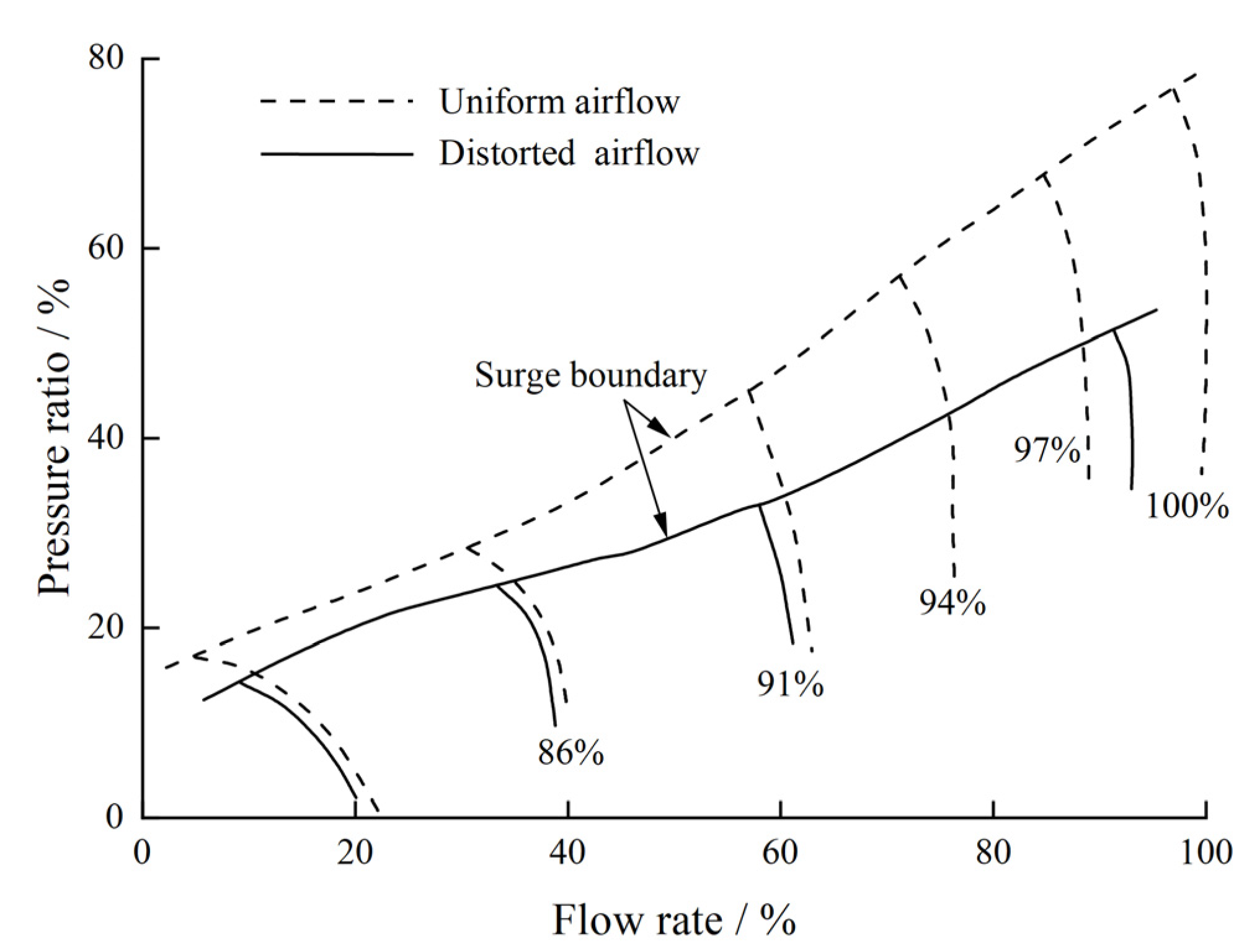
3.1.2. Engine Model under the Influence of Inlet Distortion
3.2. Adaptive Disturbance Rejection Control
3.2.1. Design of Slow Loop Control Instruction
3.2.2. Design of Adaptive Disturbance Rejection Control
4. Simulation Results
4.1. Simulation Results of Thrust Optimization Based on the Adaptive Margin Model
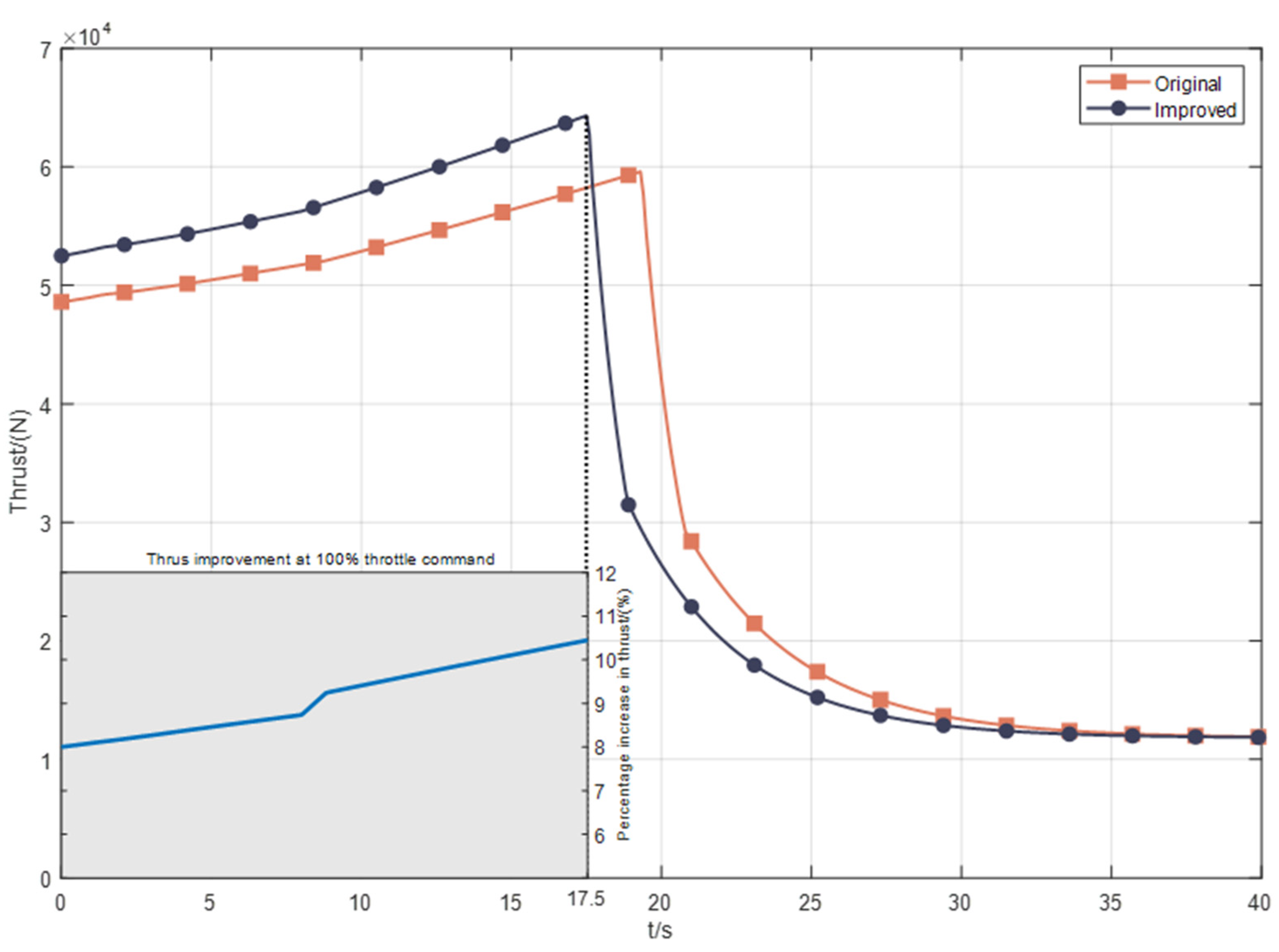
- Under the same acceleration control parameters, the thrust optimization strategy proposed in this paper can significantly improve the acceleration capability of UAV and shorten the acceleration time.
- With improved thrust performance, the UAV requires a shorter full throttle time.
- At the same flat flying speed, the throttle command of the engine after thrust optimization is smaller than the original throttle command.
- At maximum throttle, the engine’s maximum thrust output can be increased by at least 8%.
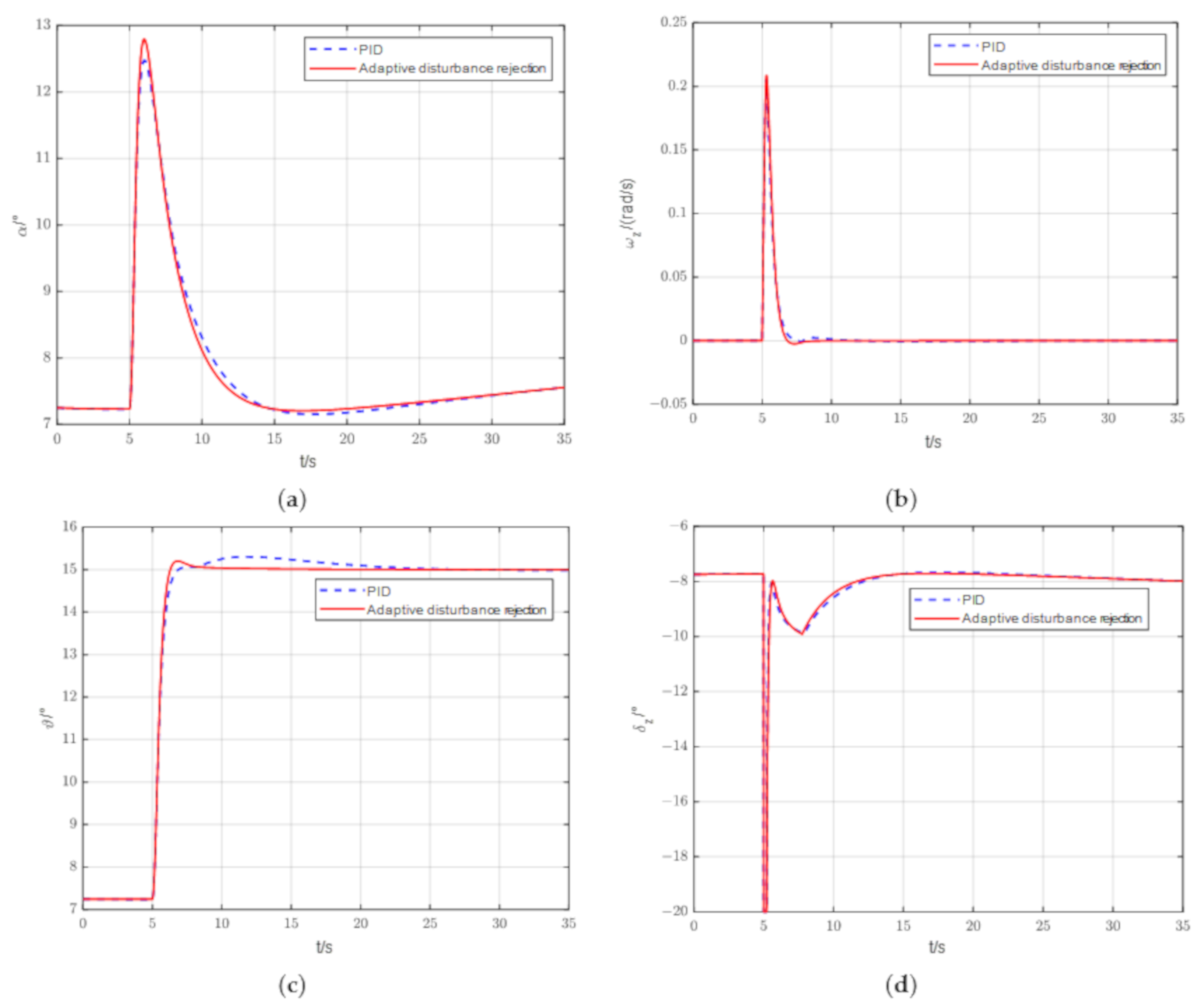
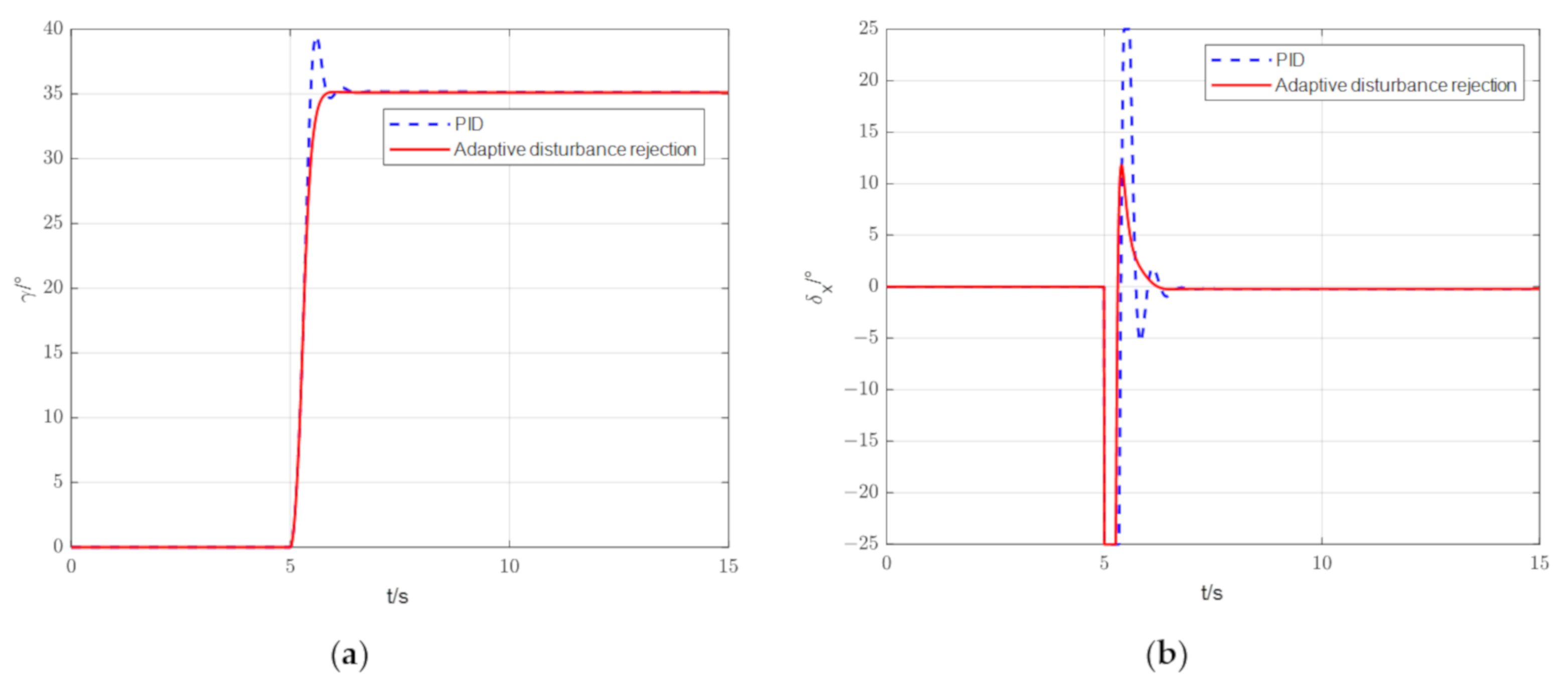
4.2. Simulation Results of Adaptive Disturbance Rejection Control
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bello, A.B.; Navarro, F.; Raposo, J.; Miranda, M.; Zazo, A.; Álvarez, M. Fixed-Wing UAV Flight Operation under Harsh Weather Conditions: A Case Study in Livingston Island Glaciers, Antarctica. Drones 2022, 6, 384. [Google Scholar] [CrossRef]
- Cao, S.; Yu, H. An Adaptive Control Framework for the Autonomous Aerobatic Maneuvers of Fixed-Wing Unmanned Aerial Vehicle. Drones 2022, 6, 316. [Google Scholar] [CrossRef]
- Liu, Z.; Han, W.; Wu, Y.; Su, X.; Guo, F. Automated Sortie Scheduling Optimization for Fixed-Wing Unmanned Carrier Aircraft and Unmanned Carrier Helicopter Mixed Fleet Based on Offshore Platform. Drones 2022, 6, 375. [Google Scholar] [CrossRef]
- Ming, Z. Research on Uav Application Development and Airworthiness Standard Management in China. Acad. J. Eng. Technol. Sci. 2020, 4, 37–46. [Google Scholar]
- Cui, Y.P.; Xing, Q.H. The challenge and inspiration of UAVs to field air defense from the Russia-Ukraine War. Aerosp. Electron. Warf. 2022, 38, 1–3. [Google Scholar]
- Li, R.J.; Gong, S. Development Direction Analysis of Future UCAV Power Plant. Aeronaut. Sci. Technol. 2015, 26, 1–5. [Google Scholar]
- Hu, X.Y. UAV Propulsion System Technology Research. Gas Turbine Exp. Res. 2008, 1, 58–61. [Google Scholar]
- Hu, X.Y. Development of High Altitude Long Endurance UAV Propulsion Technology. Gas Turbine Exp. Res. 2006, 4, 56–60. [Google Scholar]
- Chen, D.; Tian, H.J.; Li, M.X.; Lei, Q.Q. Analysis to the Development of Power Systems for MALE UAVs. Aerosp. Power 2022, 5, 16–19. [Google Scholar]
- Cheng, B.L.; Tang, H.; Xu, X.; Li, X.P. Performance Study on Turbofan Engine with Turbine Inter Burner. Aeroengine 2010, 36, 18–22. [Google Scholar]
- Dong, H.B.; Shang, G.J.; Guo, Y.Q. Effect and verification of mass injecting pre-compressor cooling on control plan of turbonfan engine. J. Aerosp. Power 2022, 37, 404–408. [Google Scholar]
- Sun, H.G.; Li, J.; Li, H.C.; Ye, B. The Analysis on Surge Margin’S Influence on Aeroengine Thrust Control System. Comput. Simul. 2017, 34, 84–89. [Google Scholar]
- Longley, J.P. A review of non-steady flow models for compressor stability. J. Turbomach. 1994, 116, 202–215. [Google Scholar] [CrossRef]
- Longley, J.P.; Shin, H.W.; Plumley, R.E. Effects of rotating inlet distortion on multistage compressor stability. ASME J. Turbomach. 1996, 118, 181–188. [Google Scholar] [CrossRef]
- Wang, J.K.; Zhang, H.B.; Chen, K.; Sun, F.Y.; Zhou, X. High stability control of engine based on surge margin estimation model. J. Aerosp. Power 2013, 28, 2145–2154. [Google Scholar]
- Liu, D.X. Aviation Gas turbine Engine Stability Design and Evaluation Technology, 6th ed.; Aviation Industry Press: Beijing, China, 2004; pp. 45–182. [Google Scholar]
- Bodó, Z.; Lantos, B. Modeling and control of fixed wing UAVs. In Proceedings of the IEEE 13th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 29–31 May 2019; pp. 332–337. [Google Scholar]
- Kim, C. Development of unified high-fidelity flight dynamic modeling technique for unmanned compound aircraft. Int. J. Aerosp. Eng. 2021, 2021, 5513337. [Google Scholar]
- Zhou, W.X. Research on Object-Oriented Modeling and Simulation for Aeroengine and Control System; DR, Nanjing University of Aeronautics and Astronautics the Graduate School: Nanjing, China, 2006. [Google Scholar]
- Iliff, K.W. Flight-Determined Subsonic Longitudinal Stability and Control Derivatives of the F-18 High Angle of Attack Research Vehicle (HARV) with Thrust Vectoring; NASA, Dryden Flight Research Center: Edwards, CA, USA, 1997; pp. 17–19.
- Lee, K.; Lee, B.; Kang, S.; Yang, S.; Lee, D. Inlet Distortion Test with Gas Turbine Engine in the Altitude Engine Test Facility. In Proceedings of the 27th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, Chicago, IL, USA, 30 June 2010; p. 4337. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equations of Motion Number ‘i’ | Coefficient of Motion Serial Number ‘j’ | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 1 | - | |||||
| 2 | ||||||
| 3 | ||||||
| Parameter | Symbol | Value |
|---|---|---|
| aircraft mass () | 9295.44 | |
| wingspan () | 9.144 | |
| wing area () | 27.87 | |
| mean aerodynamic chord () | 3.45 | |
| roll moment of inertia () | 12,874.8 | |
| yaw moment of inertia () | 85,552.1 | |
| pitch moment of inertia () | 75,673.6 | |
| product moment of inertia () | 1331.4 | |
| product moment of inertia () | 0 | |
| product moment of inertia () | 0 | |
| c.g. location () | 0.3 | |
| reference c.g. location () | 0.35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Liu, H.; Liu, K. Improved Thrust Performance Optimization Method for UAVs Based on the Adaptive Margin Control Approach. Mathematics 2023, 11, 1176. https://doi.org/10.3390/math11051176
Wang Y, Liu H, Liu K. Improved Thrust Performance Optimization Method for UAVs Based on the Adaptive Margin Control Approach. Mathematics. 2023; 11(5):1176. https://doi.org/10.3390/math11051176
Chicago/Turabian StyleWang, Yeguang, Honglin Liu, and Kai Liu. 2023. "Improved Thrust Performance Optimization Method for UAVs Based on the Adaptive Margin Control Approach" Mathematics 11, no. 5: 1176. https://doi.org/10.3390/math11051176
APA StyleWang, Y., Liu, H., & Liu, K. (2023). Improved Thrust Performance Optimization Method for UAVs Based on the Adaptive Margin Control Approach. Mathematics, 11(5), 1176. https://doi.org/10.3390/math11051176