1. Introduction
In this paper, we consider the Split Variational Inclusion Problem (SVIP) introduced by Moudafi [
1], which is the problem of finding the null point of a monotone operator in a Hilbert space whose image under a bounded linear operator belongs to another Hilbert space. Mathematically, the problem is defined as follows: find
and
where 0 is called the zero vector, with
and
being both real Hilbert spaces together with the multivalued maximal monotone mappings,
where
. Furthermore, the bounded linear operator is denoted by
. We denote the solution set of (
1) and (
2) by
.
An operator is called:
- (i)
- (ii)
Maximal monotone if the graph of any monotone mapping does not properly contain graph
of
m, where:
- (iii)
The symbol used to represent the solution of
m when a certain value
greater than zero is used as a parameter is called the resolvent, which is denoted by
:
Other nonlinear optimization problems, such as split feasibility problems, split minimization problems, split variational inequality, split zero problems, and split equilibrium problems, can all be generalized by the SVIP; see [
2,
3,
4]. Reducing SVIPs to split feasibility problems is important when modeling the intensity-modulating radiation therapy (IMRT) treatment planning. Moreso, the SVIPs play important roles in formulating many problems arising from engineering, economics, medicine, data compression, and sensor networks [
5,
6].
Recently, several authors have introduced some iterative methods for solving SVIPs, which have improved over time. In 2002, Byrne et al. [
7] first introduced a weak convergence method for solving SVIPs as follows:
for some parameter
, we have
representing the adjoint of B together with
,
and
known as the resolvent operator for
(with
). The sequence
generated by
was proved to converge weakly to
under some certain conditions. Moudafi [
1] proposed an iterative method that helps to solve SVIP with inverse strongly monotone operators; he also obtained weak convergence results using the following iteration:
where
with
L being the largest absolute value of the operator
,
and
, and
together with
are the resolvent operators of
and
, respectively. Lastly, let
and
be single-valued operators. Marino and Xu [
8] presented an iterative scheme that considers the strong convergence of the viscosity approximation method introduced by Moudafi [
9]:
f is a function that contracts on the set
H with the contraction coefficient
.
G is a linear operator that is strongly positive and bounded on
H with a constant
. The parameter is defined in a way that
, exclusive. There exists a nonexpansive mapping
F and a sequence
that takes values in
. The strong convergence of the sequence
obtained from (
5) to the fixed point
has been proven. Furthermore,
serves as the unique solution of the variational inequality:
The presentation of the optimality condition for the minimization problem is included as follows:
the function
h is a potential function for
, i.e.,
In 2014, Kazmi and Rizvi [
10] were inspired by the work of Byrne et al. (
3) to propose the following iteration for solving SVIPs. For a given
,
where
, L is the spectral radius of the operator
and sequence
satisfies the conditions:
,
, and
. The sequences
generated by (
7) converges strongly to
. Note that algorithms (
3), (
4), and (
7) contain a stepsize
, which requires the computation of the norm of the bounded linear operator; this computation is not easy to compute making these algorithms difficult to compute. The inertial technique has been gaining attention from researchers to enhance the accuracy and performance of various algorithms. This technique plays a vital role in the convergence rate of the algorithms and is based on a discrete version of a second-order dissipative dynamical system; see, for instance [
11,
12,
13,
14,
15,
16,
17,
18,
19,
20]. In Hilbert spaces, Chuang [
21] introduced a hybrid inertial proximal algorithm for solving SVIPs in 2017:
The proof of this proposed algorithm establishes that if
and
meets a specific requirement, then sequence
from Algorithm 1 weakly converges to an SVIP solution:
| Algorithm 1 Hybrid inertial proximal algorithm. |
Initialization: Choose Let be arbitrary. Set Iterative steps: Calculate as follows: Step 1. Set and compute
where satisfies
if then stop and is a solution of the SVIP. Otherwise, Set and go to step 1.
|
It is easy to see that Algorithm 1 depends on a prior estimate of the norm of the bounded operator, and the Condition (
8) is too strong to verify before computation.
Furthermore, Kesornprom and Cholamjiak [
22] improved the contraction step in Algorithm 2 and introduced the following algorithm for solving the SVIP:
| Algorithm 2 Proximal type algorithms with linesearch and inertial methods. |
Let , and sequences , . Take arbitrarily and compute
where and is considered as the smallest possible non-negative integer such that
Define
where ,
and
|
They also proved a weak convergence result under similar conditions as in Algorithm 1. Let us mention that both Algorithms 1 and 2 involve a line search procedure, which consumes extra computation time and memory during implementation. As a way to overcome this setback, Tang [
23] recently introduced a self-adaptive technique for selecting the stepsize without a prior estimate of the Lipschitz constant nor a line search procedure as follows (Algorithm 3):
| Algorithm 3 Self-adaptive technique method. |
Initialization: Choose a sequence that is non-negative and satisfies conditions . Select starting points arbitrarily and set . Iterative step: Given the current iterate . Compute
and calculate the next iteration as
Stop criterion: If , then stop the iteration. Otherwise, set and go back to the iterative step.
|
where
,
and
. The author proved that the sequence generated by Algorithm 3 converges weakly to a solution of the SVIP. Tan, Qin, and Yao [
24] introduced four self-adaptive iterative algorithms with inertial effects to solve SVIPs in real Hilbert spaces. This algorithm does not need any prior information about the operator norm. This means that their stepsize is self-adaptive. The conditions assumed in performing the strong convergences of the four algorithms are as follows:
- (C1)
Let the solution set of (SVIP) be nonempty, i.e., .
- (C2)
Let and be assumed to be two real Hilbert spaces with a bounded linear operator and its adjoint denoted by and , respectively.
- (C3)
Let be the set-valued maximal monotone mappings and is a mapping which satisfies the p-contractive property with a constant .
- (C4)
Let the sequence be positive such that where satisfies and .
Various methods inspired the first iterative algorithm. Namely, Byrne et al.’s [
7] method, the viscosity-type method, and the projection and contraction method. An iterative method called the self-adaptive inertial projection and contraction method is utilized for solving the SVIP. A description of the initial iterative method is provided below (Algorithm 4):
| Algorithm 4 Viscocity type with projection and contraction method. |
Initialization: Set , , , and let . Iterative steps: Calculate as follows: Step 1: Given the iterates and , set where
Step 2. Compute where and is the smallest non-negative integer such that
If , stop the process and consider a valid solution for the problem (SVIP). Otherwise, proceed to step 3. Step 3. Compute where
Step 4. Compute . Go to step 1 after setting .
|
Strong convergence was obtained. The second proposed algorithm is an inertial Mann-type projection and contraction algorithm to solve the SVIP, which is presented as follows (Algorithm 5):
| Algorithm 5 Mann-type with projection and contraction method. |
Initialization: Set , , and let . Iterative steps: To determine the upcoming iteration point , follow these steps:
where , , and are defined in , and , respectively.
|
Strong convergence was obtained. The third proposed algorithm is an inertial Mann-type algorithm whereby the new stepsize does not require any line search process, making it a self-adaptive algorithm. The details of the iterative scheme are described below (Algorithm 6):
| Algorithm 6 Inertial Mann-type with self-adaptive method. |
Initialization: Set , and let . Iterative steps: To determine the upcoming iteration point , follow these steps:
The sequence is given in Equation and the value of the stepsize is modified using the subsequent formula below:
|
Strong convergence was obtained. The algorithm proposed fourthly is a variation of Algorithm 6, which leverages the viscosity-type approach to prove the robust convergence of the proposed method. We present the algorithm as follows (Algorithm 7):
| Algorithm 7 New inertial viscocity method. |
Initialization: Set , and let . Iterative steps: To determine the upcoming iteration point , follow these steps:
where and are defined in and , respectively.
|
Strong convergence was obtained. The four algorithms contain an inertial term that plays a role at the rate of the convergence of Algorithms 4–7. Note that the strong convergence theorems proved for Algorithms 4–7 proposed by Tan, Qin, and Yan were obtained under some weaker conditions. Zhou, Tan, and Li [
25] proposed a pair of adaptive hybrid steepest descent algorithms with an inertial extrapolation term for split monotone variational inclusion problems in infinite-dimensional Hilbert spaces. These algorithms benefit from combining two methods, the hybrid steepest descent method and the inertial method, ensuring and achieving strong convergence theorems. Secondly, the stepsizes of the two proposed algorithms are self-adaptive, which overcomes the difficulty of the computation of the operator norm. The details of the first algorithm are presented as follows (Algorithm 8):
| Algorithm 8 Inertial hyrbid steepest descent algorithm. |
Requirements: Take arbitrary starting points . Choose sequences and in and .- 1.
Set and compute and adaptive stepsize
- 2.
Compute . - 3.
If , then stop. Otherwise, compute . - 4.
Set and return to 1.
|
Strong convergence was obtained. The second proposed algorithm is presented as follows (Algorithm 9):
| Algorithm 9 Self-adaptive hybrid steepest descnt method. |
Requirements: Two arbitrary starting points . Choose sequences and in and .- 1.
Set and compute and adaptive stepsize
- 2.
Compute . - 3.
If , then stop. Otherwise, compute . - 4.
Set and return to 1.
|
Strong convergence was obtained. The assumptions applied to Algorithms 8 and 9 are as follows: Let
and
denote two Hilbert spaces, and suppose that
is a linear operator that is bounded. Additionally, let
be the adjoint operator of
B. Let
be a
-inverse strongly monotone mapping with
and
be set-valued maximal monotone mappings with
.
is
-Lipschitz continuous and
-strongly mapping with
. Let
be
-Lipschitz continuous mapping with
. Moreover, Alakoya et al. [
26] introduced a method with an inertial extrapolation technique, viscosity approximation, and contains a stepsize that is self-adaptive; thus, the method is known as an inertial self-adaptive algorithm for solving the SVIP (Algorithm 10):
| Algorithm 10 General viscosity with self-adaptive and inertial method. |
Step 0: Select for some Set Step 1: Given the -th and n-th iterates, set
Set and return to Step 1.
|
where
is a quasi-nonexpansive mapping,
is a strongly positive mapping, and
is a contraction mapping. The convergence of a common solution for the sequence
generated by Algorithm 10 was established by the authors through proof of its strong convergence
provided that
and
satisfy
. It is clear that Algorithm 10 performs better than Algorithms 1–3 and other related methods. However, there is a need to improve the performance of Algorithm 10 by using an optimal choice of parameters for the inertial extrapolation term.
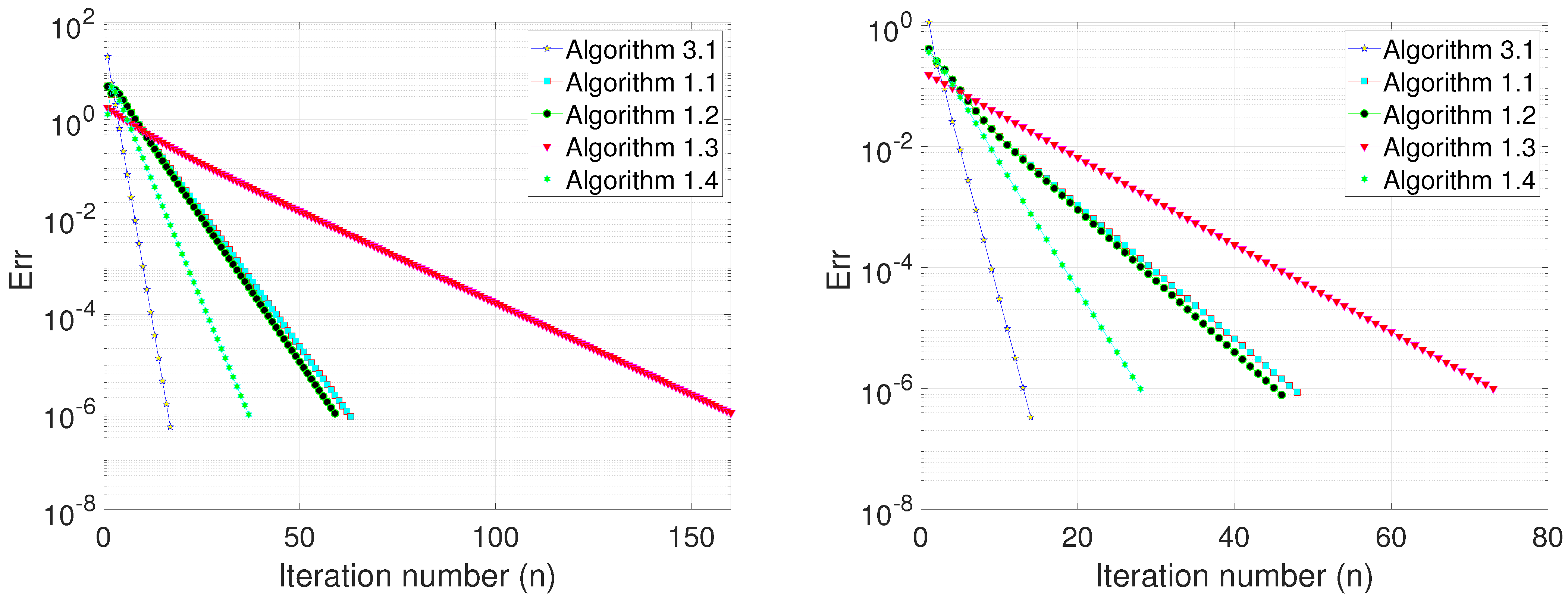
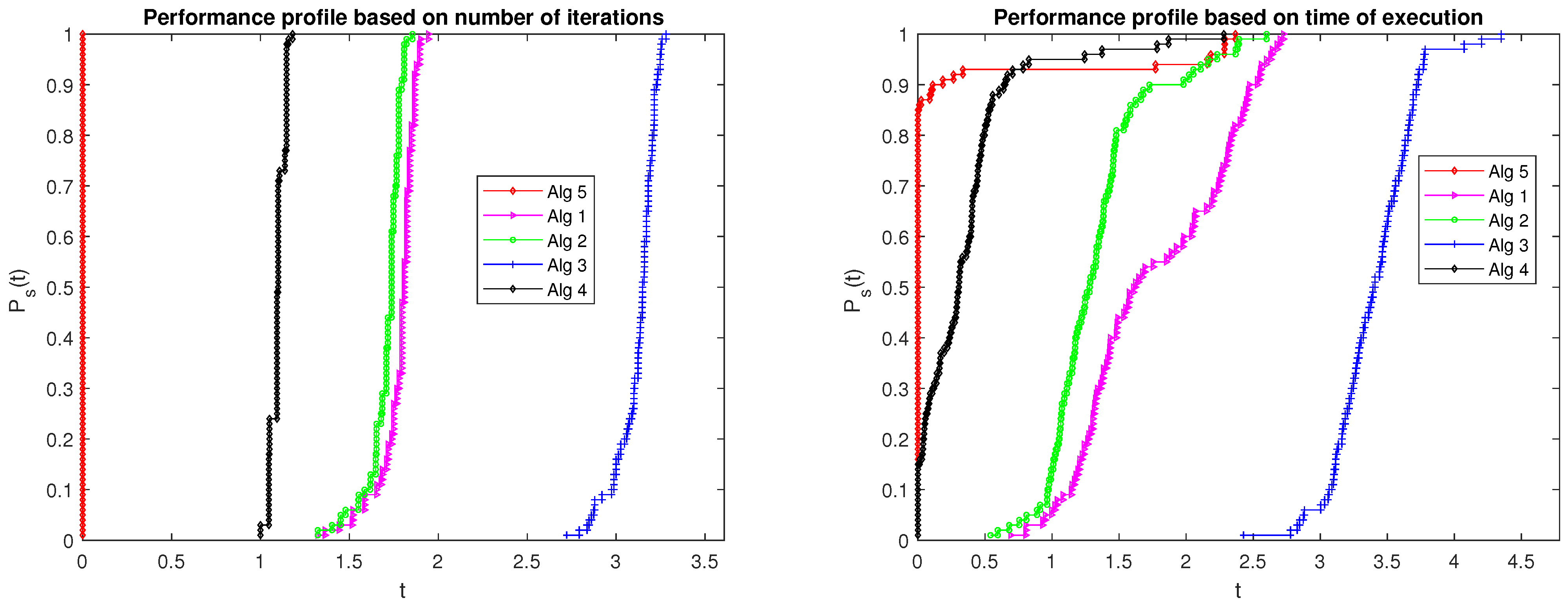
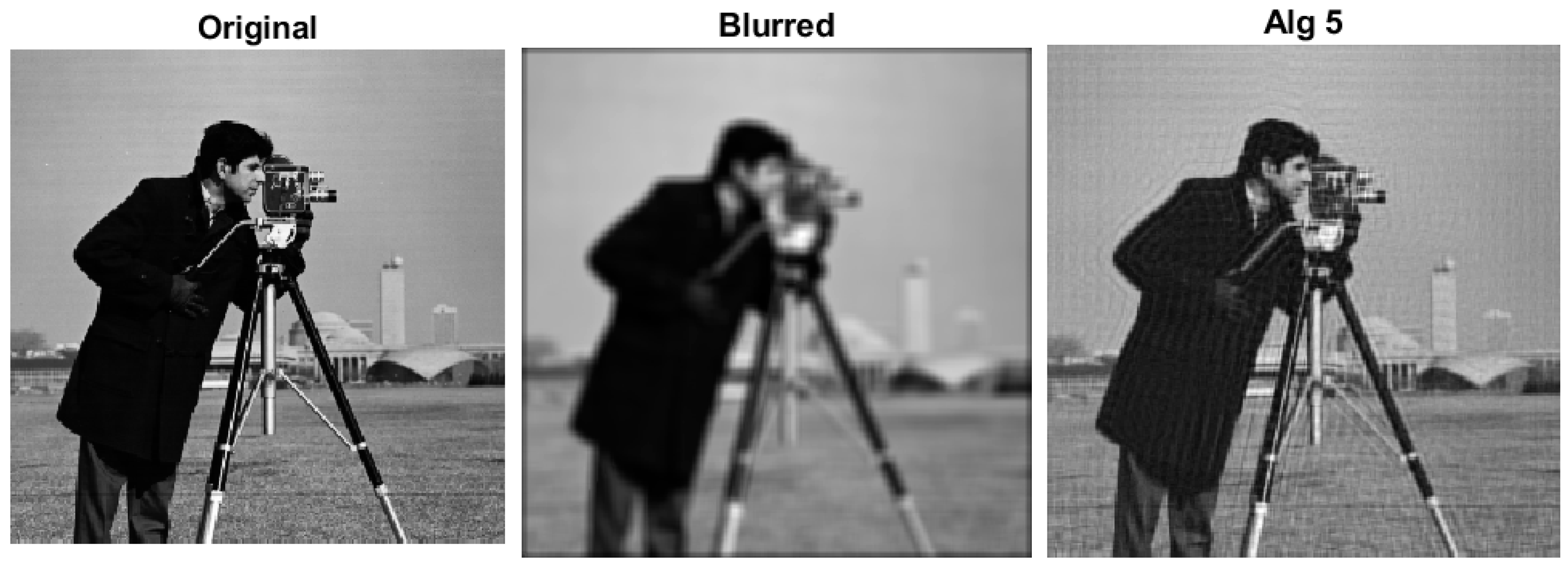
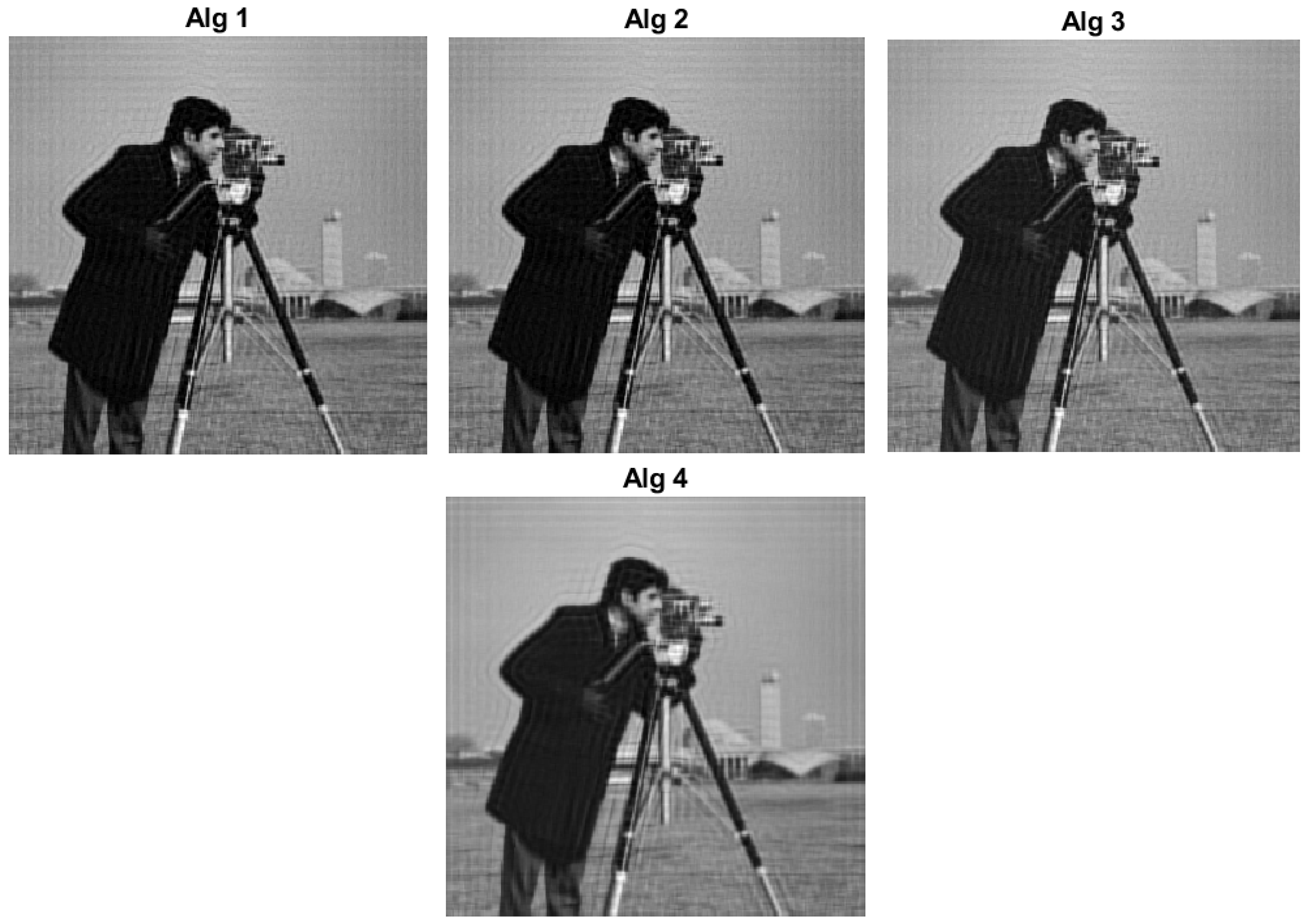
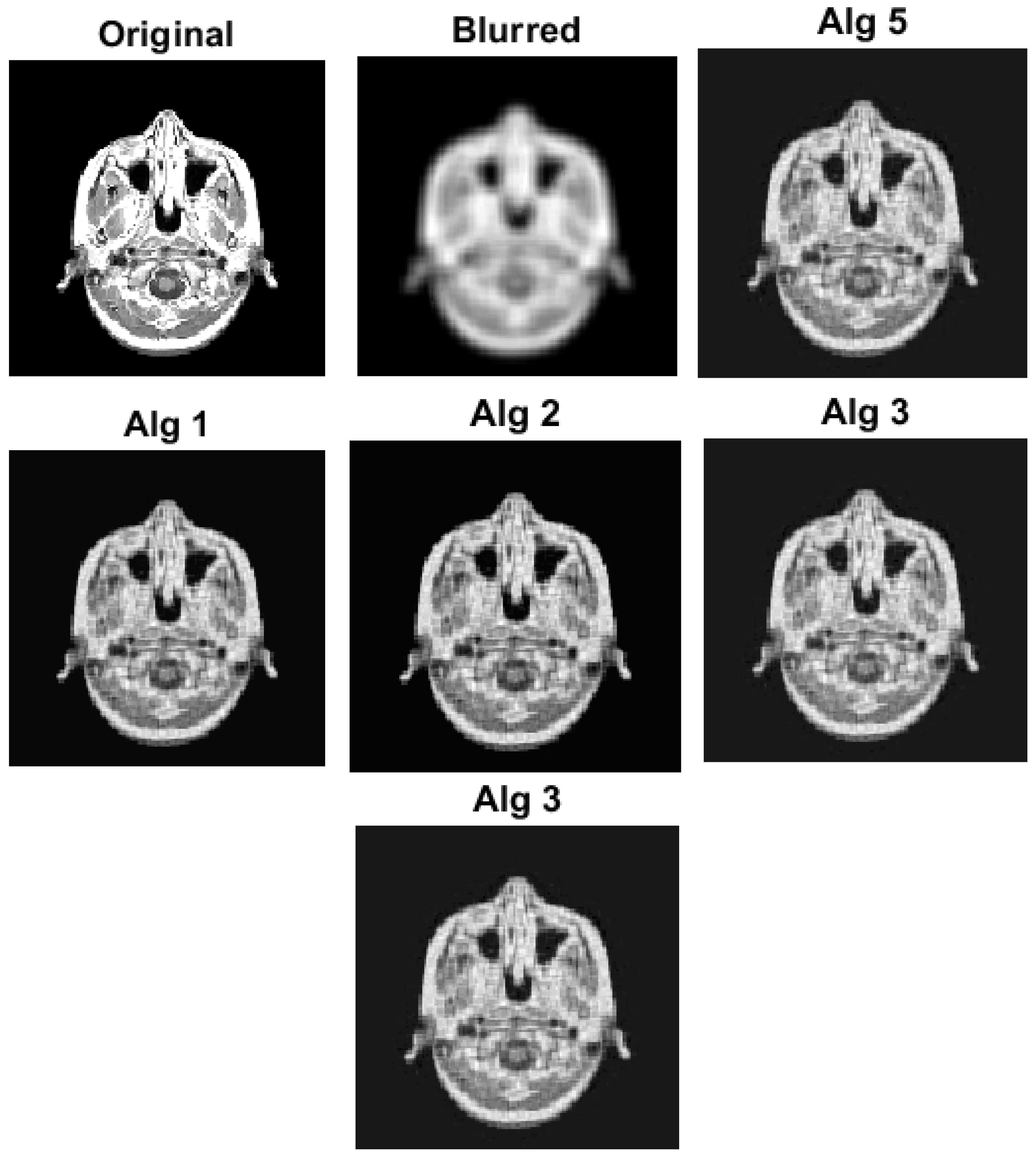
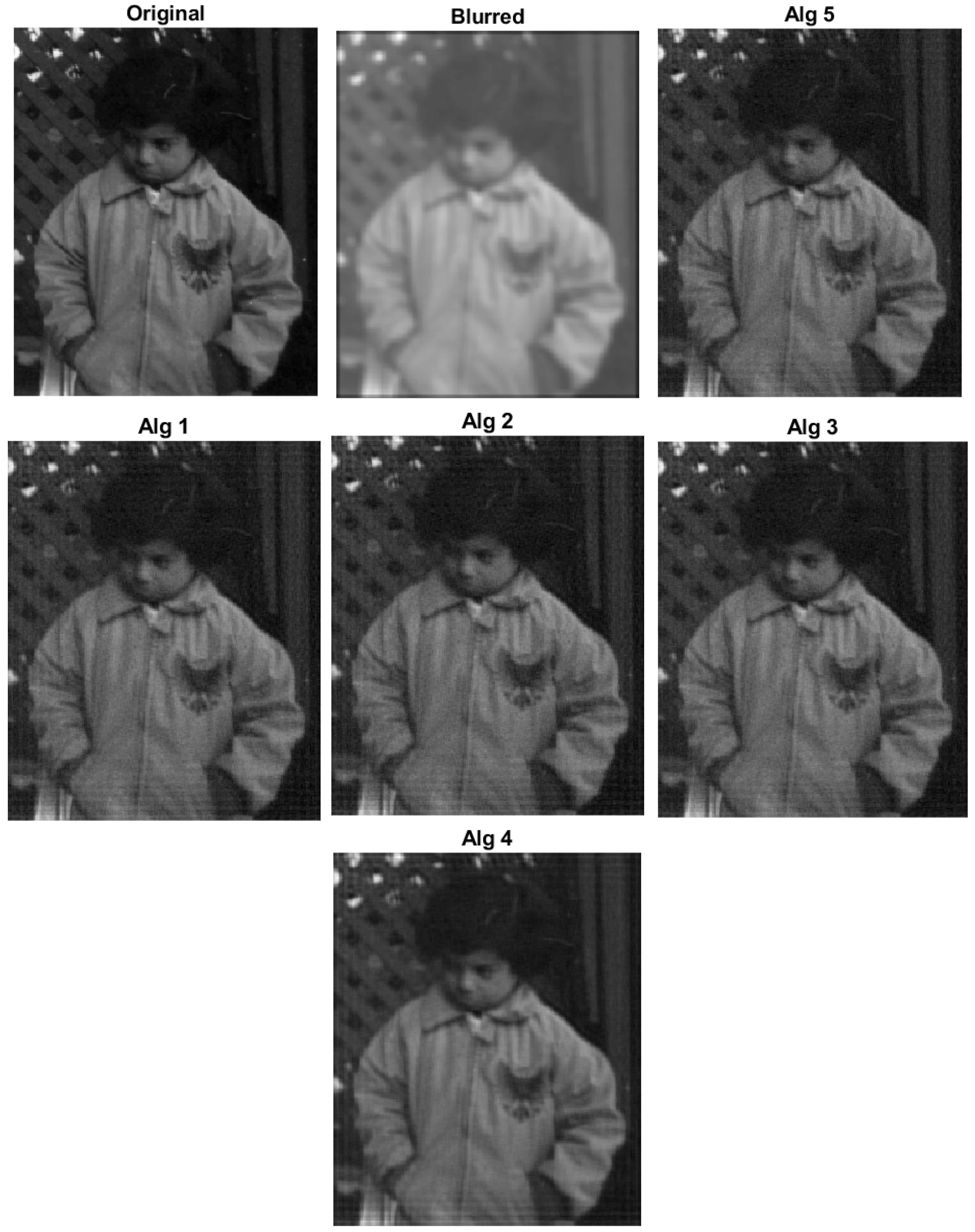
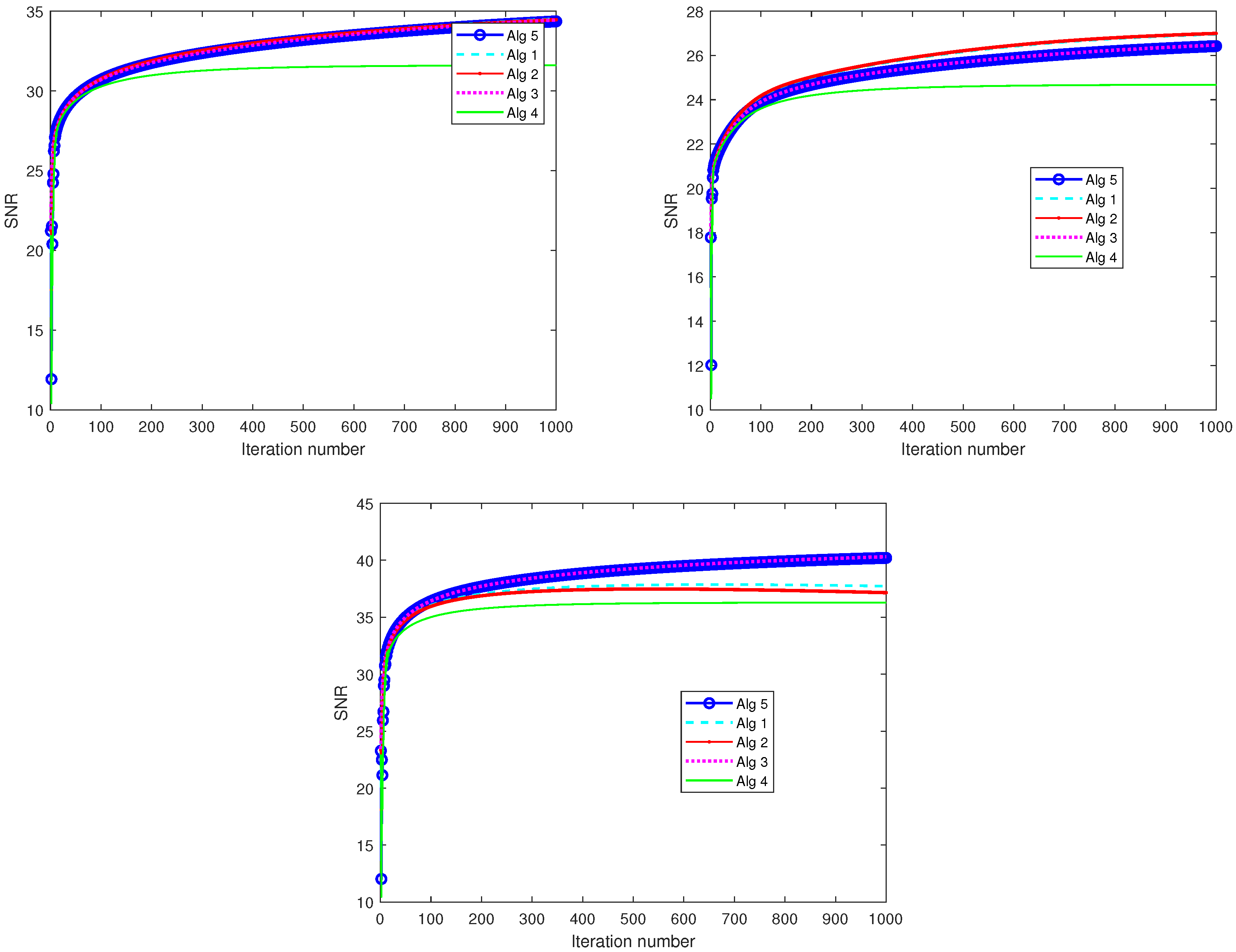
Based on the outcomes above, our paper presents a novel approach that utilizes an optimal selection of inertial term and self-adaptive techniques for solving the SVIP and fixed point problems by employing multivalued demicontractive mappings in actual Hilbert spaces. Our algorithm enhances the results of Algorithms 1–3 and 10, and other associated findings in the literature. We demonstrate a robust convergence outcome, subject to certain mild conditions, and provide relevant numerical experiments to showcase the efficiency of the proposed method. We also consider an application of our algorithm to solving image deblurring problems to demonstrate the applicability of our results.
2. Preliminaries
In this section, we present certain definitions and fundamental outcomes that will be employed in our ensuing analysis. Suppose that H is a real Hilbert space, and C is a subset of H that is closed, nonempty, and convex. We use and to denote the strong and weak convergences, respectively, of a sequence to a point .
For every vector
, there exists a unique element
in the subspace
C such that
The metric projection from H onto C is denoted as and can be defined by the subsequent expression:
- (i)
- (ii)
- (iii)
For each
and
An operator is called:
- (i)
-Lipschitz if there is a positive value of
such that
and a contraction if
;
- (ii)
Nonexpansive if F is 1-Lipschitz;
- (iii)
Quasi-nonexpansive when its fixed point set is not empty and
- (iv)
-demicontractive if
and there exists a constant
such that
Note that the nonexpansive and quasi-nonexpansive mappings are contained in the class of -demicontractive mapping; we also follow the same conditions for the Hausdorff mapping, .
Suppose we have a metric space
and a family of subsets
that are both closed and bounded. We can induce the Hausdorff metric using the metric
d on any two subsets
. This metric is defined as follows:
where
A fixed point of a multivalued mapping
is a point
that belongs to
If
only contains
a, then we refer to
a as a strict fixed point of
The study of strictly fixed points for a specific type of contractive mappings was first conducted by Aubin and Siegel [
27]. Since then, this condition has been rapidly applied to various multivalued mappings, such as those in [
28,
29,
30].
Lemma 1. The inequalities stated below are valid in a Hilbert space denoted by H.:
- (i)
- (ii)
We also use the following Lemmas to achieve our goal in the section on the main results; Lemmas [
31,
32,
33].
3. Main Results
In this section, we introduce our algorithm and provide its convergence analysis. First, we prove the state of our algorithm as follows:
Let
be two real Hilbert spaces, and the multivalued maximal monotone operators are denoted by
, where
. We denote the bounded linear operator with its adjoint as
and
, respectively. For
define
be a finite family of
-demicontractive mappings such that
is demiclosed at the point zero with
and
. Suppose that the solution set:
Let our contraction mapping be
with a constant of
and
be a strongly non-negative operator with
being its coefficient where this condition,
, is satisfied. Moreover, let
be non-negative sequences such that
. Define the following functions:
and
Now, we present our algorithm as follows (Algorithm 11):
| Algorithm 11 Proposed new inertial and self-adaptive method. |
|
To ensure our convergence outcomes, we have made assumptions on the control parameters that must meet certain conditions:
- (C1)
and
- (C2)
- (C3)
i.e.,
Remark 1. It is clear from (24) and Assumptions (C3), thatand Convergence Analysis
We begin the convergence of Algorithm 11 by proving the following results.
Lemma 2. Consider the function and defined in ; then, the functions T and H defined on are Lipschitz continuous.
Proof. Since
, therefore
where
. On the other hand,
Combining the above formulas, we have:
T being
inverse strong monotone implies that its inverse is L-Lipschitz continuous. Furthermore,
hence
Likewise, it can be observed that the function H exhibits Lipschitz continuity. □
Lemma 3. The sequence , which was generated by Algorithm 11 is bounded.
Proof. Since
, then
,
, and
. Note that
,
is firmly nonexpansive, therefore we obtain the following:
and
Since
then
. We use Lemma [
31] to obtain the following results:
thus, we apply condition (C2) and have the following:
Follow from
,
, and
to obtain:
Note that
exists by Remark 1 and let
Therefore, we have the following:
We continue and use Lemma [
32] (i) to imply that
is bounded and therefore,
is also bounded. Consequently, sequences
,
, and
are bounded. □
Lemma 4. Given as the sequence generated by the proposed Algorithm 5, put , , , for some and where and .
Then, the following conclusions hold:
- (i)
.
- (ii)
Proof. From Algorithm 11, we have
Let us use Lemma 1(i) in order to determine the following results:
thus, substituting
into
, we obtain
Now, we follow from Lemma 1(ii) and have that
Follow from
,
, and
to obtain
Also,
Furthermore, substitute
into
and have that
for some
, we have that
Furthermore, from the boundedness of
, it is easy to see that
Our next objective is to demonstrate that
. To do so, we will assume the opposite and suppose that
, which implies that there exists
where
. Therefore, according to (i), we can conclude that
Taking the limit superior of both sides of the last inequality and noting that
approaches 0, we obtain
This is a contradiction of
being a non-negative real sequence. Therefore, we can conclude that
. □
Remark 2. Given that the , it becomes easier to confirm that also approaches zero. In addition, according to Remark 1, approaches zero with an increasing n value.
Now, we present our strong convergence theorem.
Theorem 1. Given as the sequence generated by the proposed Algorithm 11 and suppose that Assumption (C1)–(C3) are satisfied. Then, strongly converges to a unique point , which solves the variational inequality Proof. Given . We will use to denote . Below are the possible cases we are considering.
CASE A: We start by assuming that there exists a
such that
is monotonically decreasing
. Then,
. Our first aim is to demonstrate that
.
thus,
. From Equations
and
we have that:
Note that
and
T together with
H are Lipschitz continuous, so we obtain that:
Therefore,
and
as
. From
,
,
, and
, we obtain the following results:
Thus, by applying condition (C2), we obtain
We also have that
thus
. Therefore,
Finally,
which results in the following:
As
, the subsequence
weakly converges to
. Denote
, since
is firmly nonexpansive, hence
and
are averaged and nonexpansive. So the subsequence
converges weakly to a fixed point
of the operator
. We now show that
that is
with
and
From
we have
since
T and
H are Lipschitz continuous, thus
and
are bounded. In addition,
, hence
as
. Since the subsequence
converges weakly to
, therefore, the function
f is lower semi-continuous and
as
, then we can determine
This implies that
is a fixed point of
or
, then we can have
or
. Moreover, the point
is a fixed point of the operator
, which means that
. Since
hence
, consequently
, This implies that
is a stationary (fixed) point of
, in fact,
. Furthermore, from (
48) and the fact that
is demiclosed at zero, then
for
Hence
First, we show that
strongly converges to
, where
is the unique solution of the variational inequality (VI):
For us to achieve our goal, we prove that
. Choose a subsequence
of
such that
. Since
and using (10), we have
Furthermore, we make use of Lemma 4, Lemma 4(i), and (
51) to obtain that
, implying that sequence
strongly converges to
. Case A is concluded.
CASE B: Now we assume that
is not monotonically decreasing. Then for some
and
, we define
by the following:
Moreover,
is increasing with
and
We can apply a similar argument to the one used in Case A and conclude that
Thus,
, where
is the weak subsequential limit of
. Also, we have
Thus, we follow from Lemma 4(i) and we have
for some
and where
Since
then from
, we obtain the following results:
Therefore, we obtain the results below:
Since the sequence
is bounded and
, it follows from Equation
and Remark 1.
We can conclude that
, the following statement holds:
Hence, . Therefore, we imply that sequence converges strongly to q. This completes the proof. □
The result presented in Theorem 1 can lead to an improvement when compared to the findings of [
26]. It is important to recall that the set of quasi-nonexpansive mappings can be classified as 0-demicontractive. Therefore, we can utilize the same discoveries to obtain outcomes when approximating a common solution for the SVIP, together with a restricted number of multivalued quasi-nonexpansive mappings. The following remark highlights our contributions to this paper:
Remark 3. - (i)
A new optimal choice of the inertial extrapolation technique is introduced. This can also be adapted for other iterative algorithms to perform better.
- (ii)
The algorithm obtained a strong convergence result without necessarily imposing a solid condition on the control parameters.
- (iii)
The self-adaptive technique prevents the need to calculate a prior estimate of the norm of the bounded linear operator at every iteration.
- (iv)
The algorithm produces suitable solutions that approximate the entire set of solutions Γ as stated in , using appropriate starting points. This feature sets it apart from Tikhonov-type regularization methods, which always converge to the same solution sequence. We find this attribute particularly intriguing.



 and
and 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}