Abstract
The global -synchronization problem for nonlinear multi-weighted complex dynamical networks with uncertain parameter perturbation and mixed time-varying delays is investigated in this paper. Unlike other existing works, all delays, including sampling and internal and coupling delays, are assumed to be unbounded, making the considered model more general and practical. Based on the generalized impulsive comparison principles, a time-varying impulsive controller with sampling delays is designed, and some new sufficient conditions are obtained to make drive–response multi-weighted networks reach -synchronization. In addition, the external coupling matrices do not need to meet the requirement of zero-row sum, and the limitation of time delay on pulse interval is weakened. The results obtained in this article can be seen as extensions of previous related research.
MSC:
37N35
1. Introduction
Recently, complex networks have been widely investigated because of their realistic applications in various fields, such as image encryption, filtering, secure communication, stability analysis, etc. [1,2,3,4,5,6,7]. Considerable attention from scholars has been cast on the dynamic behaviors of complex networks, and numerous remarkable achievements have been reached [8,9,10]. Synchronization, as a kind of interesting and significant collective behavior of complex dynamical networks, has become a hot object gradually [11,12]. To date, various synchronization modes have been studied, including pinning synchronization [13], exponential synchronization [14], finite-time synchronization [15], impulsive synchronization [16,17], etc.
Unfortunately, most existing results about synchronization problems only pay attention to the complex network model with a single weight, which may lead to inaccurate modeling of real networks. Multi-weighted networks are ubiquitous in our work and life. For example, in a logistics network, each city is regarded as a separate node, and goods are transported from one node to another by different means such as highways, railways, and airways. It is obvious that such a multichannel network cannot be precisely modeled by a single weighted system. In a social network, taking each person as a single node, individuals can connect with each other through different tools such as telephone, email, Facebook, etc. Clearly, it is more suitable to apply multi-weighted systems to describe the social network since each communication tool has its features forming a different subnetwork. Considering the practicality and universality of multi-weighted complex networks, some researchers have attempted to study such networks and some preliminary results have been obtained recently. For instance, in [18], Zhang et al. investigated the asymptotic synchronization of stochastic multi-weighted systems. In [19], the authors studied the synchronization of multi-weighted complex networks with noise based on graph theory methods. In [20], Guo et al. derived the finite-time synchronization criteria of multi-weighted switching dynamical networks by using quantized intermittent control. It is worth noting that the delay effect was not considered in the multi-weighted models developed in [18,19,20].
As a matter of fact, in real multi-weighted networks, various time delays are non-negligible since different subsystems have different limited transmission speeds. Taking the logistics network as an instance, it is composed of the highway network, railway network, and air network (see Figure 1). Each subnetwork has its distinctive transmission speeds, which may result in different time delays. To describe real multi-weighted networks better, internal and coupling time delays were introduced in the models of [21], and several useful synchronization criteria were derived for delayed multi-weighted systems based on the stability theory. In [22], aperiodically adaptive intermittent synchronization for stochastic multi-weighted complex networks with hybrid delays was considered using extended stochastic differential inequalities. Moreover, in [23], Zheng et al. studied the decay synchronization of multi-weighted neural networks including internal and coupling delays by constructing a novel Lyapunov–Krasovskii function. Besides internal and coupling delays, sampling delays also should be considered in the control process because it is difficult to immediately complete the sampling and transferring of impulse information at several discrete instants in the practical application environment. Hence, it is particularly important to utilize the recent information on drive systems to replace the real-time information in the impulsive control process. In recent years, based on delayed impulsive control schemes, some research results on synchronization problems of complex networks have been obtained. For instance, in [24], delayed impulsive control methods were used to deal with the synchronization of linear complex systems. In [25], delayed impulsive controllers were applied to the synchronization of nonlinear complex networks. Zhang et al. [26] derived the asymptotic chaotic synchronization criteria of stochastic complex-valued dynamical systems via delayed impulsive control. We should note that the delayed complex networks above always assumed that time delays were bounded or even constants. However, in some practical applications, there is no prior condition on the bound of time delays, which shows that it may be unpredictable or unbounded. In ecosystems, the unbounded delay is used to describe the effect of predator behavior on predator population growth, and ignoring the boundlessness of time delay will lead to inaccurate or even wrong results. Therefore, when we model the complex network with time-varying delays, removing the assumption that the delays are bounded can obtain more reasonable results.
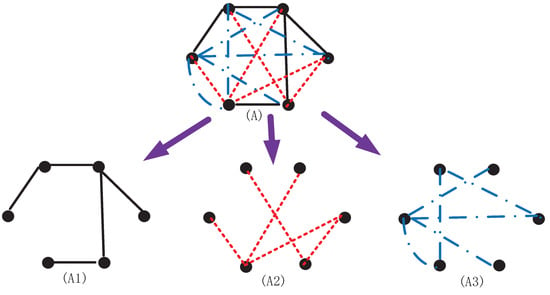
Figure 1.
The schematic diagram of the logistic network: (A) complete logistic network; (A1) highway network; (A2) railway network; (A3) air network.
To cope with the synchronization issues of single-weighted systems including unbounded delays, Chen and Wang [27] considered the -stability scheme. As an extension of Lyapunov stability, it always is applied to analyze the stability issue of dynamical systems including unknown delays by correlating the historical and current information of network nodes through -function [28]. For instance, Xu et al. [29] considered the -synchronization of dynamical networks including unknown delays. The authors in [30] studied the -stability issue for impulsive networks with time-varying delays of unknown bound. Global -synchronization criteria of impulsive complex-valued networks with leakage delay and distributed delay were gained in [31] based on -stability. In addition, unknown parameter perturbations caused by modeling errors, measurement inaccuracies, and changes in ambient temperature and humidity widely exist in complex networks, which brings challenges to synchronization control. Specifically, each node in a complex network has its own dynamic behavior, which can be described by various differential dynamical systems, and the standard parameters of these systems may be difficult to determine in certain cases. To construct a more generalized network, parameter uncertainties should be considered. For instance, Wang et al. [32] studied the synchronous motion of networked robotic systems, which have uncertain kinematic and dynamic information in the task space. In [33], Rakkiyappan et al. discussed the robust synchronization of neural networks with Markovian jumping and stochastic uncertainties by constructing a new Lyapunov–Krasovskii function. In [34], Huang et al. considered the synchronization of uncertain Cohen–Grossberg neural networks with delayed couplings under fixed time. Lately, the bipartite synchronization issues of neural networks with uncertain parameters were studied [35]. However, the theoretical results obtained in [27,28,29,30,31,32,33,34,35] are based on the assumption that the model is a single weight. Compared with single-weighted networks, multi-weighted networks have more complex and unpredictable dynamic behavior, which is more valuable to consider and research. To the best of our knowledge, very few works focus on the -synchronization issues of multi-weighted complex networks with unbounded mixed time delays and uncertainties via impulsive control including sampling delays, which is the primary motivation of this article.
Taking the facts above into consideration, this paper studies the -synchronization for multi-weighted dynamical networks including three kinds of time delays and uncertain perturbation by using delayed impulsive control. To be more practical, nonlinear couplings are considered in this paper. The main highlights of this article include three aspects: (1) To prefer the more practical significance of our results, in this article, a more generalized uncertain multi-weighted model including unbounded internal delay, sampling delay, and coupling delay is discussed. (2) Different from the impulsive control schemes in [24,25,26], a delayed impulsive controller with unbounded sampling delay is devised, and new synchronization criteria are gained for the concerned multi-weighted networks. (3) The topological matrices of the multi-weighted systems in this paper do not need to meet the condition of zero-row sum, and the constriction of time delay on pulse interval is weakened.
Besides the first section, the network model description and preliminaries are given in Section 2. In Section 3, some new -synchronization criteria for a complicated multi-weighted model are obtained. In Section 4, numerical examples are provided to show the correctness of our theorem and corollaries. Section 5 is the conclusion of this article.
Notation 1.
I represents an identity matrix. means that A represents a semi-negative definite matrix. Let is continuously differentible}. is piecewise continuous apart from some limited moments Let , and the norm of is expressed as . converts into if Let is nondecreasing on and denote the minimum and maximum eigenvalues of B, respectively.
2. Mathematical Model and Preknowledge
Consider a nonlinear multi-weighted dynamical network including unbounded delays and parametric uncertainties, which can be expressed as
where is the state vector of node i, , and . . and are connection weight matrices. , and represent uncertain parameter perturbation. and stand for nonlinear vector-valued functions characterizing the nonlinear dynamic behavior of nodes, and denotes the nonlinear coupling function. The internal delay and the coupling delays have no bound, which means . The constant represents the coupling strength for the rth coupling form. In addition, is the outer coupling matrix of the rth subnetwork, where is defined as follows: if there exists a connection link from node i to node j, then ; otherwise, . The initial value of model (1) is given by , and .
Take model (1) as the drive system, then the concerned response system can be described as follows:
where , and is the ith state variable for response system (2). The initial value of model (2) is given by , and . The equation
represents the impulsive controller with unbounded sampling delay, where indicates the system error of node i. represents the impulsive gain matrix. denotes the sampling delay at impulsive points, which satisfies . The impulsive instants meet and as . The set of impulsive instants is expressed as . For any let .
Remark 1.
In addition to nonlinear coupling and uncertainty perturbations, three types of unbounded time-varying delays, including impulse sampling delays and internal and coupling delays, are introduced into our complex system. At the same time, the topologies of the whole network are not restricted by the condition of zero-row sum, which shows our results are more generalized than other related results.
Combining models (1) and (2), and , we can obtain the following error system
for , where , , and . It is assumed that the solution of system (4) is right continuous, namely, . Then, the synchronization issue of drive–response systems (1) and (2) is equivalent to constructing a suitable control gain matrix M such that error system (4) is -stable.
Definition 1.
Remark 2.
Most synchronization modes are closely related to μ-synchronization. When the μ-synchronization becomes power synchronization; when , the μ-synchronization changes into exponential synchronization; when , , the μ-synchronization is log synchronization;
Assumption 1.
There exist three nonnegative constants and such that
hold for any vectors and .
Assumption 2.
For each outer coupling matrix , there exist a corresponding nonnegative constant such that
Assumption 3.
The uncertain system matrices , and are norm bounded and have the following form
where stands for the unknown time-varying matrix satisfying and , are constant matrices.
Assumption 4.
There exist some constants , and such that satisfies
where when and when .
Lemma 1
([35]). For any real matrix and vectors , one can obtain
Lemma 2
([11]). The following matrix inequality
equals to one of the conditions as follows:
where and
Lemma 3
([28]). Under Assumption 4, satisfies the following condition
where for , , and . If one can find suitable parameters and such that
and
3. Main Results
This section gives the global -synchronization criteria between the response system (2) and the drive system (1) by using impulsive control with unbounded sampling delays. The main theorem and corollaries are gained below.
Theorem 1.
Under Assumptions 1–4, if there exists a function matrices , a constant and several nonnegative constants , , such that
Proof.
Choose the following Lyapunov function:
When , calculating the Dini derivative of along the solution of (4) yields
By Assumption 1, Assumption 3 and Lemma 1, we have
Similarly, we can obtain
By Assumptions 1–2 and Lemma 1, we have
Similarly, one can obtain
Denote . When , we obtain
Based on Lemma 2 and condition (v) in Theorem 1, we have
which implies
Remark 3.
Compared with the existing impulse synchronization results [12,16,17], which require the parameter T to be restricted by the bound of time delay, that is, as the time delay increases, the impulsive interval needs to be gradually reduced. In this article, the impulsive interval T is no longer limited by the delay size, which can be seen in condition (i).
Remark 4.
The synchronization problem of complex networks with time delay is studied [21,22,23,24,25,26]. However, these results are all based on the assumption that there exist positive scalars τ or such that or . On the contrary, in this paper, the three kinds of time delays are all unbounded, i.e., , , and .
Remark 5.
The existing results about μ-stability or μ-synchronization in [27,28,29,30,31] mainly focused on single-weighted networks rather than multi-weighted networks. Furthermore, the network topologies must meet dissipative coupling conditions and system uncertain perturbation was ignored in these works. In this paper, the μ-synchronization criteria for multi-weighted networks including unbounded mixed delays and uncertainties are derived via a delayed impulsive control scheme.
Particularly, if the mixed time-varying delays in drive–response systems (1) and (2) have more limitations, then we can gain two important corollaries as follows:
Corollary 1.
Under Assumptions 1–3 and inequalities –, suppose , , ,, and , , where and If there are two scalars to make the following conditions:
Corollary 2.
Under Assumptions 1–3 and inequalities –, suppose , and , where If there are two scalars to make the following conditions
and
hold, then complex systems (1) and (2) can achieve the global log synchronization via the control matrix
Proof.
Similarly, we just verify Assumption 4. For any , one has
Set , , and . We can easily derive Corollary 2. □
Corollary 3.
Under Assumptions 1–3 and inequalities –, suppose , where and . If there are two scalars to make the following conditions:
and
hold, then complex systems (1) and (2) can achieve the global exponential synchronization via the control matrix
Proof.
Similarly, we just verify Assumption 4. For any , we have
Set and . We can easily derive Corollary 3. □
4. Numerical Simulations
Two numerical examples are given to illustrate the validity of the synchronization criteria obtained above. Consider the following neural network consisting of 6 nodes with mixed delays and uncertainties, which could be described by
where is the state vector of the ith node. The nonlinear functions are . Take the above equation as the drive network, and the corresponding response network is described as follows:
Respectively, the connection matrices and parametric uncertainties are selected as
By simple calculation, one can easily obtain , such that Assumption 1 holds. The outer coupling matrices , and are chosen from left to right as follows:
Clearly, Assumption 2 is satisfied with . The other parameters are set as , . By calculation, one can gain that and . To solve the rest of the conditions in Corollary 1, Matlab LMI Toolbox is used and we can obtain the feasible solutions as follows.
Then control gain matrix M could be designed as
The initial values of networks are produced stochastically from [−50, 0]. By the fourth-order Runge–Kutta technology, the simulation results of Corollary 1 can be seen in Figure 2. Figure 2a displays the time evolution of through the effective matrix M, which demonstrates that the response system (23) can achieve synchronization with (22) by using delayed impulsive control. In case there exists some change for the gain matrix , which breaks the corresponding conditions, then Figure 2b shows the synchronization target between the drive system (22) and the response system (23) cannot be achieved.
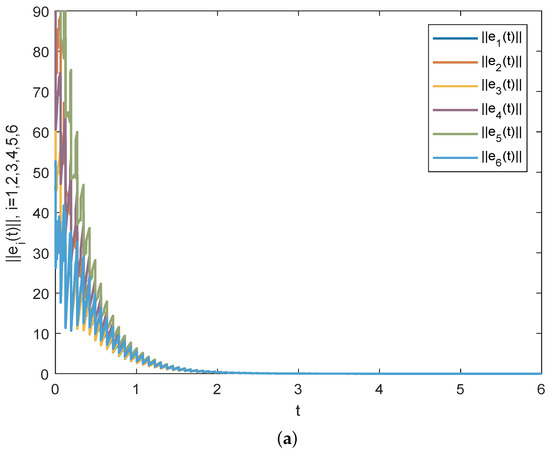
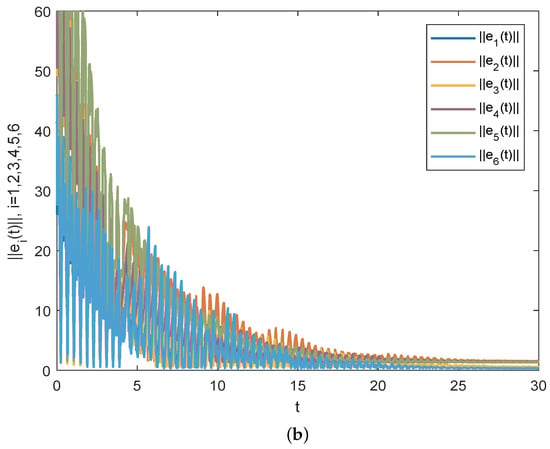
Figure 2.
(a) Time evolution of through the effective impulsive matrix M. One can see that approach zero over time, which shows complex networks (23) and (22) can achieve synchronization in this case. (b) Time evolution of through the impulsive gain matrix . Since breaks the conditions of Corollary 1, one can see that cannot approach zero over time and the synchronization fails in this instance.
Next, to verify the effect of different parameter forms on the synchronization process, we change the uncertain parameters, coupling parts, and delay expressions. The uncertain matrix and the coupling matrices , are set, respectively, as
We choose nonlinear variable delays rather than linear delays, such as . Set , , . By calculation, one can obtain that and The remaining parameters are identical to the first example. To solve the rest of the conditions in Corollary 2, by using LMI Toolbox, we can obtain the feasible solutions as follows:
Then control gain matrix M could be designed as
The initial values of networks are produced stochastically as before and the simulation results of Corollary 2 are gained in Figure 3. Figure 3a displays the time evolution of through the useful impulsive matrix M, and it implies that complex networks (23) and (22) realize synchronization by using the proposed impulsive control methods. If there exists some change for the impulsive matrix , which makes the corresponding conditions unsatisfied, then synchronization cannot be achieved between complex networks (22) and (23), as displayed in Figure 3b.
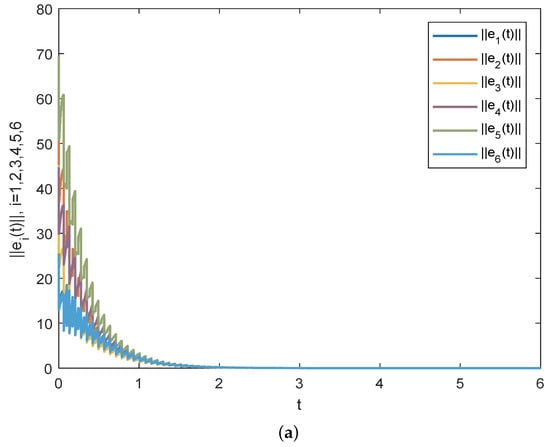
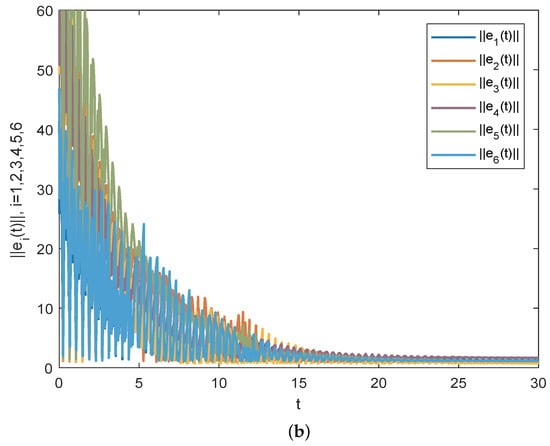
Figure 3.
(a) Time evolution of through the effective impulsive matrix M. One can see that synchronization errors approach zero over time, which implies response network (23) achieves synchronization with drive network (22) in this case. (b) Time evolution of under impulsive gain matrix . Since matrix breaks the conditions of Corollary 2, one can see that cannot approach zero over time and the synchronization fails in this situation.
5. Conclusions
We investigated the -synchronization issues of nonlinearly coupled multi-weighted drive–response networks with unbounded mixed time-varying delays and uncertain parameter perturbation in this article. By designing a suitable -function and the impulsive controller including unbounded sampling delays, several new sufficient conditions were gained to ensure the -synchronization of the concerned multi-weighted network. The restrictions between delays and impulsive intervals were weakened, and the coupling matrices were not confined by zero-row sum requirement, which made our results more general. Ultimately, numerical simulations were provided to verify the correctness and effectiveness of our theoretical analysis.
Author Contributions
Conceptualization, K.S., Y.Z. and H.W.; methodology, K.S. and Y.Z.; software, H.F., J.T. and Y.Z.; writing—original draft preparation, H.F. and J.T.; writing—review and editing, H.F., J.T. and H.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Open Foundation of Engineering Research Center of Big Data Application in Private Health Medicine, Fujian Province University (MKF202201), the Sichuan Science and Technology Program under Grant (21YYJC0469), the Program of Science and Technology of Sichuan Province of China under Grant (2021ZYD0012) and the Natural Science Foundation of Fujian Province under Grant (2019J01815, 2022J011171, 2022J011170).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mani, P.; Rajan, R.; Shanmugam, L.; Joo, Y.H. Adaptive control for fractional order induced chaotic fuzzy cellular neural networks and its application to image encryption. Inf. Sci. 2019, 491, 74–89. [Google Scholar] [CrossRef]
- Tang, Z.; Park, J.H.; Wang, Y.; Feng, J.W. Impulsive synchronization of derivative coupled neural networks with cluster-tree topology. IEEE Trans. Netw. Sci. Eng. 2020, 7, 1788–1798. [Google Scholar] [CrossRef]
- Shi, K.B.; Wang, J.; Zhong, S.M.; Tang, Y.Y.; Cheng, J. Non-fragile memory filtering of T-S fuzzy delayed neural networks based on switched fuzzy sampled-data control. Fuzzy Sets Syst. 2020, 394, 40–64. [Google Scholar] [CrossRef]
- Aliabadi, F.; Majidi, M.H.; Khorashadizadeh, S. Chaos synchronization using adaptive quantum neural networks and its application in secure communication and cryptography. Neural Comput. Appl. 2022, 34, 6521–6533. [Google Scholar] [CrossRef]
- Hu, W.; Zhu, Q.X.; Karimi, H.R. Some improved Razumikhin stability criteria for impulsive stochastic delay differential systems. IEEE Trans. Autom. Control 2019, 64, 5207–5213. [Google Scholar] [CrossRef]
- Fu, X.Z.; Zhu, Q.X. Stability of nonlinear impulsive stochastic systems with Markovian switching under generalized average dwell time condition. Sci. China Inf. Sci. 2018, 61, 112211. [Google Scholar] [CrossRef]
- Hu, W.; Zhu, Q.X. Stability criteria for impulsive stochastic functional differential systems with distributed-delay dependent impulsive effects. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2027–2032. [Google Scholar] [CrossRef]
- Sun, Y.G.; Liu, Y.H. Adaptive synchronization control and parameters identification for chaotic fractional neural networks with time-varying delays. Neural Process. Lett. 2021, 53, 2729–2745. [Google Scholar] [CrossRef]
- Yang, X.S.; Yang, Z.C. Synchronization of TS fuzzy complex dynamical networks with time-varying impulsive delays and stochastic effects. Fuzzy Sets Syst. 2014, 235, 25–43. [Google Scholar] [CrossRef]
- Xu, H.F.; Zhu, Q.X. New criteria on pth moment exponential stability of stochastic delayed differential systems subject to average-delay impulses. Syst. Control Lett. 2022, 164, 105234. [Google Scholar] [CrossRef]
- Xia, W.G.; Cao, J.D. Pinning synchronization of delayed dynamical networks via periodically intermittent control. Chaos Interdiscip. J. Nonlinear Sci. 2009, 19, 013120. [Google Scholar] [CrossRef] [PubMed]
- Rao, R.F.; Lin, Z.; Ai, X.Q.; Wu, J.R. Synchronization of Epidemic Systems with Neumann Boundary Value under Delayed Impulse. Mathematics 2022, 10, 2064. [Google Scholar] [CrossRef]
- Wang, J.L.; Wu, H.N.; Huang, T.W. Pinning control for synchronization of coupled reaction-diffusion neural networks with directed topologies. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1109–1120. [Google Scholar] [CrossRef]
- Tang, Z.; Park, J.H.; Lee, T.H. Mean square exponential synchronization for impulsive coupled neural networks with time-varying delays and stochastic disturbances. Complexity 2016, 21, 190–202. [Google Scholar] [CrossRef]
- Shi, K.B.; Wang, J.; Zhong, S.M.; Tang, Y.Y.; Cheng, J. Hybrid-driven finite-time H∞ sampling synchronization control for coupling memory complex networks with stochastic cyber attacks. Neurocomputing 2020, 387, 241–254. [Google Scholar] [CrossRef]
- Fan, H.G.; Shi, K.B.; Zhao, Y. Pinning impulsive cluster synchronization of uncertain complex dynamical networks with multiple time-varying delays and impulsive effects. Phys. A 2022, 587, 126534. [Google Scholar] [CrossRef]
- Pan, L.; Cao, J.; Al-Juboori, U.A.; Abdel-Aty, M. Cluster synchronization of stochastic neural networks with delay via pinning impulsive control. Neurocomputing 2019, 366, 109–117. [Google Scholar] [CrossRef]
- Zhang, C.M.; Shi, L. Exponential synchronization of stochastic complex networks with multi-weights: A graph-theoretic approach. J. Frankl. Inst. 2019, 356, 4106–4123. [Google Scholar] [CrossRef]
- Zhang, C.M.; Yang, Y.H. Synchronization of stochastic multi-weighted complex networks with Lévy noise based on graph theory. J. Frankl. Inst. 2020, 546, 123496. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, B.D.; Wu, Y.B. Finite-time synchronization of stochastic multi-links dynamical networks with Markovian switching topologies. J. Frankl. Inst. 2020, 357, 359–384. [Google Scholar] [CrossRef]
- Li, S.; Li, Y.X.; Ding, X.H. More general results of aperiodically intermittent synchronization for stochastic Markovian switching complex networks with multi-links and time-varying coupling structures. Neurocomputing 2020, 395, 39–55. [Google Scholar] [CrossRef]
- Li, S.; Lv, C.Y.; Ding, X.H. Synchronization of stochastic hybrid coupled systems with multi-weights and mixed delays via aperiodically adaptive intermittent control. Nonlinear Anal. Hybrid Syst. 2020, 35, 100819. [Google Scholar] [CrossRef]
- Zheng, M.W.; Li, L.X.; Peng, H.P.; Xiao, J.H.; Yang, Y.X.; Zhang, Y.P.; Zhao, H. General decay synchronization of complex multi-links time-varying dynamic network. Commun. Nonlinear Sci. Numer. Simul. 2019, 67, 108–123. [Google Scholar] [CrossRef]
- Liu, X.Z.; Zhang, K.X. Synchronization of linear dynamical networks on time scales: Pinning control via delayed impulses. Commun. Nonlinear Sci. Numer. Simul. 2016, 72, 147–152. [Google Scholar] [CrossRef]
- Li, X.D.; Song, S.J.; Wu, J.H. Exponential stability of nonlinear systems with delayed impulses and applications. IEEE Trans. Autom. Control 2019, 64, 4024–4034. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, X.S.; Xu, C.; Feng, J.W. Exponential synchronization of complex-valued complex networks with time-varying delays and stochastic perturbations via time-delayed impulsive control. Appl. Math. Comput. 2017, 306, 22–30. [Google Scholar] [CrossRef]
- Chen, T.P.; Wang, L.L. Global μ-Stability of delayed neural networks with unbounded time-varying delays. IEEE Trans. Neural Netw. 2007, 18, 1836–1840. [Google Scholar] [CrossRef]
- Fan, H.G.; Shi, K.B.; Zhao, Y. Global μ-synchronization for nonlinear complex networks with unbounded multiple time delays and uncertainties via impulsive control. Phys. A 2022, 599, 127484. [Google Scholar] [CrossRef]
- Xu, Z.L.; Li, X.D.; Duan, P.Y. Synchronization of complex networks with time-varying delays of unknown bound via delayed impulsive control. Neural Netw. 2020, 125, 224–232. [Google Scholar] [CrossRef]
- Cui, H.M.; Guo, J.; Feng, J.X.; Wang, T.F. Global μ-stability of impulsive reaction-diffusion neural networks with unbounded time-varying delays and bounded continuously distributed delays. Neurocomputing 2015, 157, 1–10. [Google Scholar] [CrossRef]
- Hu, B.X.; Song, Q.K.; Li, K.L.; Zhao, Z.J.; Alsaadi, F.; Fuad, E. Global μ-synchronization of impulsive complex-valued neural networks with leakage delay and mixed time-varying delays. Neurocomputing 2018, 307, 106–116. [Google Scholar] [CrossRef]
- Wang, H. Task-space synchronization of networked robotic systems with uncertain kinematics and dynamics. IEEE Trans. Autom. Control 2013, 58, 3169–3174. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Chandrasekar, A.; Petchiammal, G. Non-fragile robust synchronization for Markovian jumping chaotic neural networks of neutral-type with randomly occurring uncertainties and mode-dependent time-varying delays. ISA Trans. 2014, 53, 1760–1770. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.L.; Qiu, S.H.; Ren, S.Y.; Zheng, Z.W. Fixed-time synchronization of coupled Cohen-Grossberg neural networks with and without parameter uncertainties. Neurocomputing 2018, 315, 157–168. [Google Scholar] [CrossRef]
- Mao, K.; Liu, X.Y.; Cao, J.D.; Hu, Y.F. Finite-time bipartite synchronization of coupled neural networks with uncertain parameters. Phys. A 2022, 585, 126431. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).