
Modified Projection Method with Inertial Technique and Hybrid Stepsize for the Split Feasibility Problem



Abstract
:1. Introduction
2. Preliminaries and Lemmas
- firmly nonexpansive if
- g is convex if and only if:
- (1)
- for all ;
- (2)
- for all ;
- (3)
- for all .
- (i)
- exists for each ;
- (ii)
- every sequential weak limit point of is in Ω.
3. Main Results
- Step 1
- Construct the inertial step:
- Step 2
- Compute the relaxed CQ iteration:
- Step 3
- Calculate the next iterate via:where
- Step 4
- Compute the stepsize
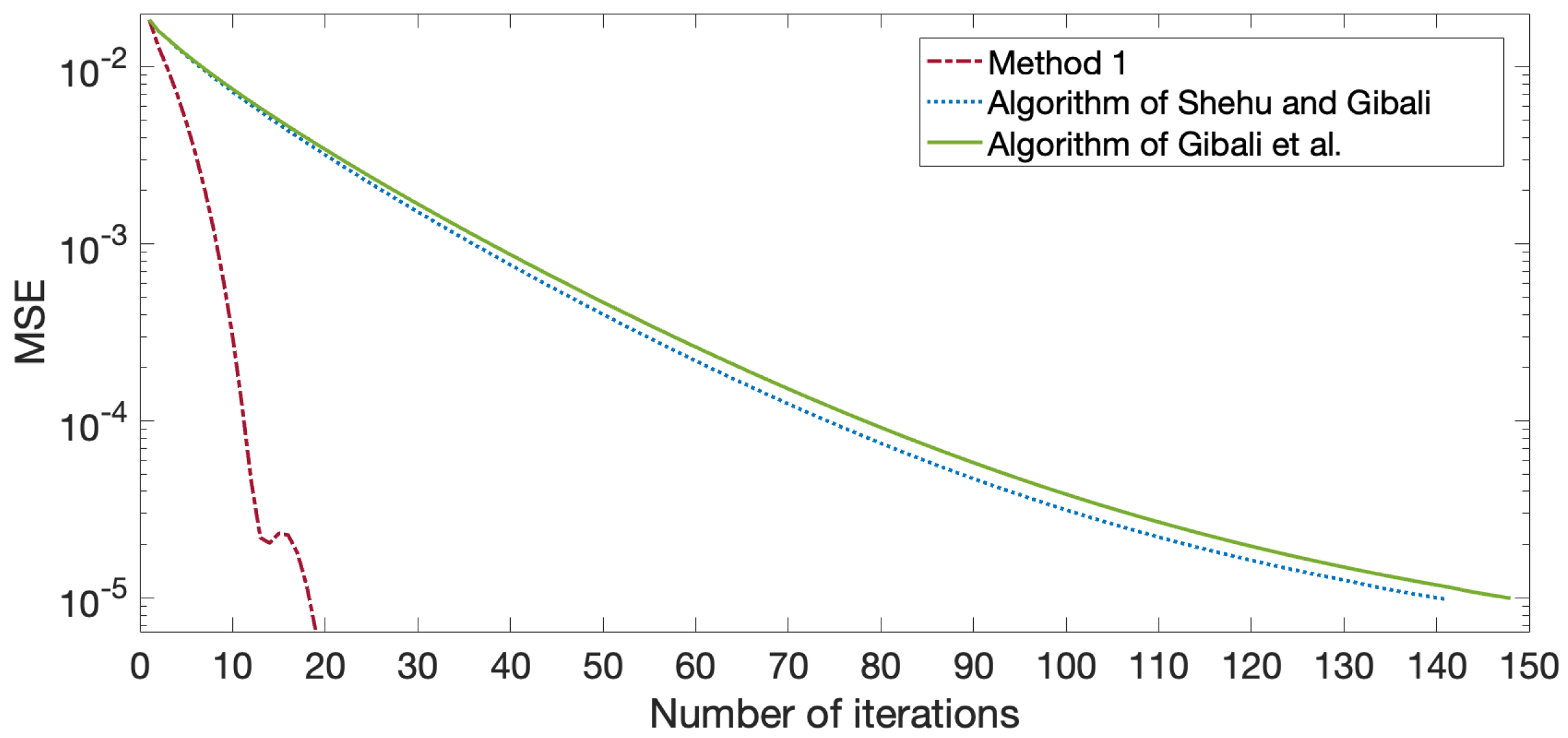
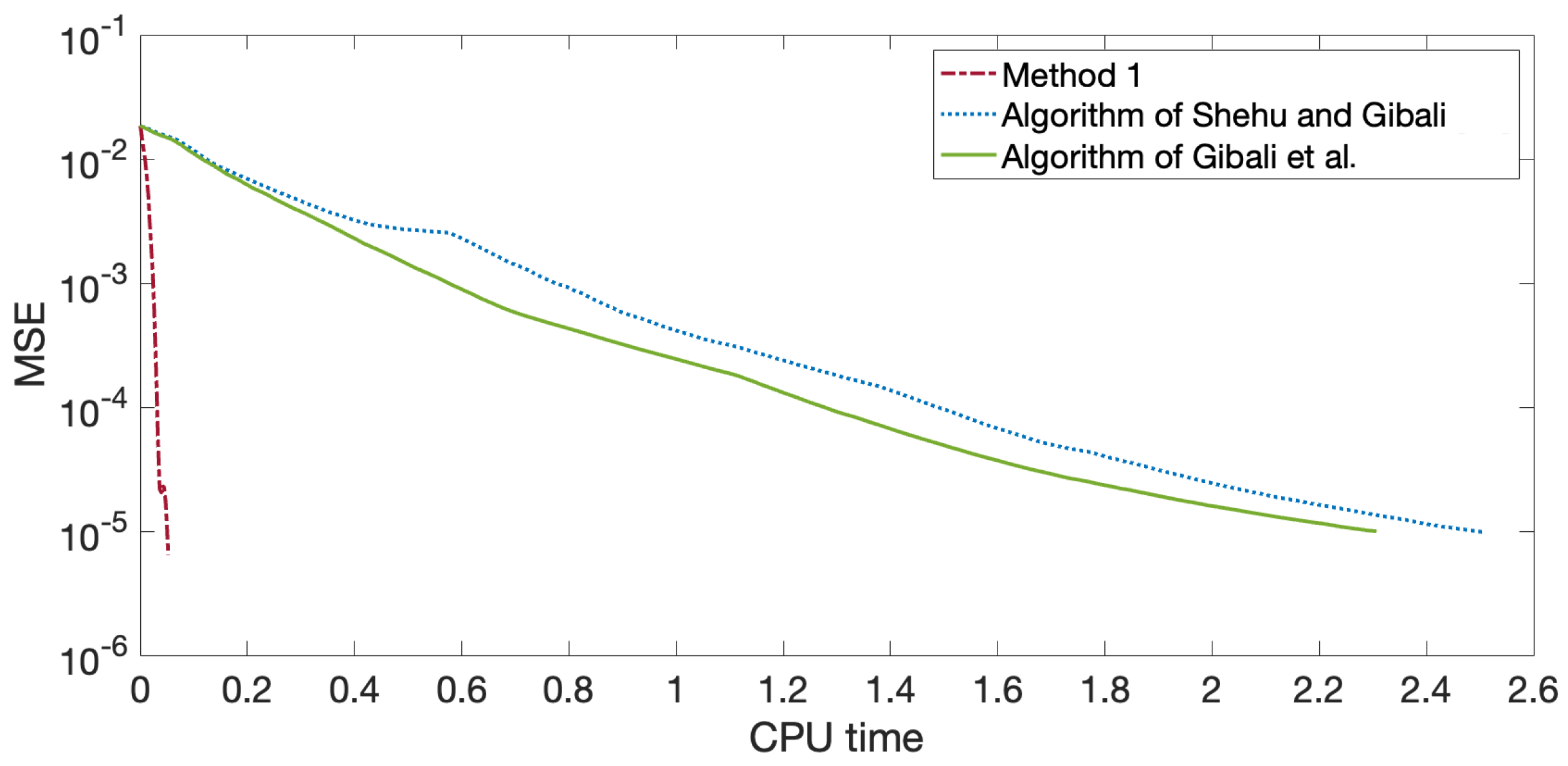
4. Numerical Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Byrne, C.; Moudafi, A. Extensions of the CQ algorithm for the split feasibility and split equality problems. Doc. Trav. 2013, 18, 1485–1496. [Google Scholar]
- Censor, Y.; Gibali, A.; Lenzen, F.; Schnörr, C. The implicit convex feasibility problem and its application to adaptive image denoising. J. Comput. Math. 2016, 34, 610–625. [Google Scholar] [CrossRef] [Green Version]
- O’Hara, J.G.; Pillay, P.; Xu, H.K. Iterative approaches to convex feasibility problems in Banach spaces. Nonlinear Anal. Theory Methods Appl. 2006, 64, 2022–2042. [Google Scholar] [CrossRef]
- Tian, D.; Jiang, L. Two-step methods and relaxed two-step methods for solving the split equality problem. Comput. Appl. Math. 2021, 40, 83. [Google Scholar] [CrossRef]
- Censor, Y.; Elfving, T. A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Ansari, Q.H.; Rehan, A. An iterative method for split hierarchical monotone variational inclusions. Fixed Point Theory Appl. 2015, 2015, 121. [Google Scholar] [CrossRef] [Green Version]
- Censor, Y.; Elfving, T.; Kopf, N.; Bortfeld, T. The multiple-sets split feasibility problem and its applications for inverse problems. Inverse Probl. 2005, 21, 2071. [Google Scholar] [CrossRef] [Green Version]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A. A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51, 2353. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Censor, Y.; Motova, A.; Segal, A. Perturbed projections and subgradient projections for the multiple-sets split feasibility problem. J. Math. Anal. Appl. 2007, 327, 1244–1256. [Google Scholar] [CrossRef] [Green Version]
- Gu, R.; Dogandžić, A. Projected nesterov’s proximal-gradient algorithm for sparse signal recovery. IEEE Trans. Signal Process. 2017, 65, 3510–3525. [Google Scholar] [CrossRef]
- Ceng, L.C.; Ansari, Q.H.; Yao, J.C. An extragradient method for solving split feasibility and fixed point problems. Comput. Math. Appl. 2012, 64, 633–642. [Google Scholar] [CrossRef] [Green Version]
- Dang, Y.; Gao, Y. The strong convergence of a KM–CQ-like algorithm for a split feasibility problem. Inverse Probl. 2010, 27, 015007. [Google Scholar] [CrossRef]
- Gibali, A.; Mai, D.T. A new relaxed CQ algorithm for solving split feasibility problems in Hilbert spaces and its applications. J. Ind. Manag. Optim. 2019, 15, 963. [Google Scholar] [CrossRef] [Green Version]
- Kesornprom, S.; Pholasa, N.; Cholamjiak, P. On the convergence analysis of the gradient-CQ algorithms for the split feasibility problem. Numer. Algorithms 2020, 84, 997–1017. [Google Scholar] [CrossRef]
- Kesornprom, S.; Cholamjiak, P. On inertial relaxation CQ algorithm for split feasibility problems. Commun. Math. Appl. 2019, 10, 245–255. [Google Scholar]
- Qu, B.; Xiu, N. A new halfspace-relaxation projection method for the split feasibility problem. Linear Algebra Its Appl. 2008, 428, 1218–1229. [Google Scholar] [CrossRef] [Green Version]
- Suparatulatorn, R.; Cholamjiak, W.; Gibali, A.; Mouktonglang, T. A parallel Tseng’s splitting method for solving common variational inclusion applied to signal recovery problems. Adv. Differ. Equ. 2021, 2021, 492. [Google Scholar] [CrossRef]
- Yambangwai, D.; Khan, S.A.; Dutta, H.; Cholamjiak, W. Image restoration by advanced parallel inertial forward-backward splitting methods. Soft Comput. 2021, 25, 6029–6042. [Google Scholar] [CrossRef]
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441. [Google Scholar] [CrossRef]
- Yang, Q. The relaxed CQ algorithm solving the split feasibility problem. Inverse Probl. 2004, 20, 1261. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Y.; Yang, Q. Modified projection methods for the split feasibility problem and the multiple-sets split feasibility problem. Appl. Math. Comput. 2012, 219, 1644–1653. [Google Scholar] [CrossRef]
- Gibali, A.; Liu, L.W.; Tang, Y.C. Note on the modified relaxation CQ algorithm for the split feasibility problem. Optim. Lett. 2018, 12, 817–830. [Google Scholar] [CrossRef]
- López, G.; Martín-Márquez, V.; Wang, F.; Xu, H.K. Solving the split feasibility problem without prior knowledge of matrix norms. Inverse Probl. 2012, 28, 085004. [Google Scholar] [CrossRef]
- Nesterov, Y.E. A method for solving the convex programming problem with convergence rate O(1/k2). Dokl. Akad. Nauk SSSR 1983, 269, 543–547. [Google Scholar]
- Shehu, Y.; Gibali, A. New inertial relaxed method for solving split feasibilities. Optim. Lett. 2021, 15, 2109–2126. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: New York, NY, USA, 2011; Volume 408. [Google Scholar]
- Osilike, M.O.; Aniagbosor, S.C.; Akuchu, B.G. Fixed points of asymptotically demicontractive mappings in arbitrary Banach spaces. Panam. Math. J. 2002, 12, 77–88. [Google Scholar]
- Hanjing, A.; Suantai, S. A fast image restoration algorithm based on a fixed point and optimization method. Mathematics 2020, 8, 378. [Google Scholar] [CrossRef] [Green Version]
- Bauschke, H.H.; Combettes, P.L. A weak-to-strong convergence principle for Fejér-monotone methods in Hilbert spaces. Math. Oper. Res. 2001, 26, 248–264. [Google Scholar] [CrossRef] [Green Version]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m-Sparse | Methods | ||
|---|---|---|---|
| Iter | Iter | ||
| m = 10 | Method 1 | 6 | 11 |
| Algorithm of Shehu and Gibali [25] | 15 | 73 | |
| Algorithm of Gibali et al. [22] | 16 | 77 | |
| m = 20 | Method 1 | 8 | 17 |
| Algorithm of Shehu and Gibali [25] | 29 | 89 | |
| Algorithm of Gibali et al. [22] | 30 | 94 | |
| m = 30 | Method 1 | 9 | 19 |
| Algorithm of Shehu and Gibali [25] | 41 | 141 | |
| Algorithm of Gibali et al. [22] | 43 | 148 |
| Methods | Iter | MSE Values | Objective Functions | ||
|---|---|---|---|---|---|
| MSE | CPU | Obj | CPU | ||
| Method 1 | 1 | 0.0185 | 0.0002 | 1.8832 × 10 | 0.0007 |
| 2 | 0.0130 | 0.0052 | 3.8504 × 10 | 0.0050 | |
| 3 | 0.0097 | 0.0094 | 1.8248 × 10 | 0.0091 | |
| 4 | 0.0070 | 0.0126 | 1.0359 × 10 | 0.0125 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | |
| 19 | 6.4529 × 10 | 0.0524 | 0.0746 | 0.0522 | |
| Algorithm of Shehu and Gibali [25] | 1 | 0.0185 | 0.0006 | 1.8832 × 10 | 0.0007 |
| 2 | 0.0159 | 0.0372 | 1.2047 × 10 | 0.0364 | |
| 3 | 0.0144 | 0.0676 | 7.4679 × 10 | 0.0665 | |
| 4 | 0.0128 | 0.0864 | 5.5536 × 10 | 0.0862 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | |
| 141 | 9.8423 × 10 | 2.5043 | 0.6112 | 2.5041 | |
| Algorithm of Gibali et al. [22] | 1 | 0.0185 | 0.0002 | 1.8832 × 10 | 0.0011 |
| 2 | 0.0159 | 0.0312 | 1.2047 × 10 | 0.0303 | |
| 3 | 0.0144 | 0.0593 | 7.4679 × 10 | 0.0582 | |
| 4 | 0.0130 | 0.0766 | 5.7134 × 10 | 0.0765 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | |
| 148 | 9.9682 × 10 | 2.3068 | 0.6227 | 2.3067 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suantai, S.; Kesornprom, S.; Cholamjiak, W.; Cholamjiak, P. Modified Projection Method with Inertial Technique and Hybrid Stepsize for the Split Feasibility Problem. Mathematics 2022, 10, 933. https://doi.org/10.3390/math10060933
Suantai S, Kesornprom S, Cholamjiak W, Cholamjiak P. Modified Projection Method with Inertial Technique and Hybrid Stepsize for the Split Feasibility Problem. Mathematics. 2022; 10(6):933. https://doi.org/10.3390/math10060933
Chicago/Turabian StyleSuantai, Suthep, Suparat Kesornprom, Watcharaporn Cholamjiak, and Prasit Cholamjiak. 2022. "Modified Projection Method with Inertial Technique and Hybrid Stepsize for the Split Feasibility Problem" Mathematics 10, no. 6: 933. https://doi.org/10.3390/math10060933
APA StyleSuantai, S., Kesornprom, S., Cholamjiak, W., & Cholamjiak, P. (2022). Modified Projection Method with Inertial Technique and Hybrid Stepsize for the Split Feasibility Problem. Mathematics, 10(6), 933. https://doi.org/10.3390/math10060933