1. Introduction
Modeling and visualization are widely used in teaching and research as useful tools for better understanding mathematical concepts and results. They are also frequently applied in natural and engineering sciences.
Here, we used our own software to visualize the geometry of linear metric spaces that have recently been used and studied in functional analysis and operator theory. This goal was achieved by visualizing spheres in the metric of the studied spaces.
We introduce a new sequence space , prove that it is a linear metric space with respect to its natural total paranorm, and solve the visibility and contour (silhouette) problems for the visualization of spheres or their parts in three-dimensional space endowed with the relative paranorm of .
Finally, we demonstrate the influence of the change of the entries of the matrix A and the terms of the sequence p on the shapes of the spheres in the relative metric of in three-dimensional space.
All the figures in this paper were created by our own software for the visualization of mathematical objects and concepts, in particular of curves and surfaces in three-dimensional space. The development of our software started in 1993 for the purpose of helping students better understand the topics of classical differential geometry. The original software is explained in detail in the book [
1]. One major interest in differential geometry concerns the properties of curves, surfaces, and curves on surfaces such as geodesic and asymptotic lines and lines of curvature. This is the reason for our approach to represent surfaces exclusively by families of curves on them. Since we do not approximate surfaces, the accuracy of the curves on them can be as precise as desirable, within the limits of the representation of real numbers and the used methods of computation. This results in smooth-looking curves even in very large-sized graphics.
Over the years, it turned out that our software is also useful in the visualization of our scientific results. We applied it for the graphical representations of our results, for instance, in topology [
2], crystallography [
3], paranormed spaces [
4], and Hahn spaces [
5]. In this paper, we used it for illustrating some results in functional analysis.
In this paper, we represent surfaces, which are spheres in various metrics, by two families of curves, in particular by parameter lines in green and blue. This gives the spheres a natural look. The well-known shape of the spheres in Euclidean metrics is a special case of the shapes of the spheres we represent. The other surfaces appear as distortions of Euclidean spheres.
We used central projection in our software with the free choice of all parameters. The center of projection is given in spherical coordinates, because they give a better idea of its position.
The visibility of points was checked analytically immediately after the computation of their coordinates. A point on surface is visible (with respect to the surface) if it is not hidden by any other point of the same surface that lies on the projection ray. Therefore, we have to compute the intersection of the projection ray with the surface. In particular, we found values
and
of the parameters in the parametric representation of the surface and the value of
t in the parametric representation of the projection ray. The computation of these parameters is given in
Section 4.
Since we used only curves to represent surfaces, their representations appear unfinished without their silhouettes. This involves the partial derivatives of the parametric representation of the surfaces. The necessary computations are described in
Section 4. In the figures in this paper, the silhouettes are represented by thick black curves.
2. A New Class of Paranormed Sequence Spaces
Here, we introduce a new class of sequence spaces and discuss some topological properties of the spaces.
We use the standard notations
for the set of all complex sequences
and
and
for the sets of all sequences in
that converge to zero and that terminate in zeros, respectively. Let
and
for
be the sequences with
for all
k and
and
for
. Furthermore, for every sequence
and
, let:
be the so-called
n-section of the sequence x.
We recall the concept of a
paranorm (see, for instance [
6], Definition 4.2.1).
Definition 1. Let X be a linear space.
A functionis called a paranorm,
if for all : | (P.1) |
| (P.2) |
| (P.3) |
| (P.4) |
| |
| (P.5) |
| |
A paranormed space(or simply X) is a linear space endowed with a paranorm g. A paranorm g is said to be total, if implies .
Remark 1. If g is a total paranorm for a linear space X, then obviouslyfor alldefines a metric on X, which is translation invariant. Hence, every totally paranormed space is a linear metric space. The converse statement is also true. The metric of any linear metric space is given by some total paranorm ([6] Theorem 10.4.2). Remark 2. It is well known ([6] Theorem 4.4.1) that ω is a complete totally paranormed space with respectdefined by:and:that is convergence in ω and coordinatewise convergence are equivalent. An
space
X is a subset of
, which is a complete linear metric space with its metric
d stronger than the metric
on
X, that is convergence in
implies coordinatewise convergence ([
7] Definition 9.2.1, Remark 9.2.2). If the metric of an
space
X is normable, then
X is called a
space. An
space
is said to have
([
7] Definition 9.2.12), if every sequence
has a unique representation
.
Remark 3. Many authors include local convexity in the definition of an space; we did not, because it was not needed in our studies.
Example 1. (a) ([7] Example 9.2.12 (b)) The set ω is anspace withwith respect to the metricdefined byfor all sequences; (b) ([8,9,10] and [11] Theorem 2) Letbe a sequence of positive real numbers, and:In the case where the terms of the sequence p are constant, sayfor all k, then the setsandreduce to the classical spacesand. If the sequence p is bounded and, thenandarespaces withwith respect to their natural paranormsand, respectively, where:It is easy to see thatandare not linear spaces, when the sequence p is not bounded. Let
be an infinite matrix of complex entries,
and
. We write
for the sequence in the
row of
A:
provided all the series
converge. The set:
is called the
matrix domain of A in X.
The Hahn space
h was originally introduced and studied by Hahn in 1922 [
12] in connection with the theory of singular integrals, and later generalized to
by Goes [
13] for sequences
of positive reals, where:
and
for all
k. In the special cases, where
or
for all
k, the generalized Hahn space reduces to the original Hahn space
h or the classical space
(see, for instance [
14], Definition 7.3.3), respectively. It was shown in [
15], Proposition 2.1, that if the sequence
d is increasing and unbounded, then
is a
space with
.
Matrix transformations and bounded and compact operators on the Hahn space have recently been studied in various papers, for instance in [
5,
15,
16,
17,
18,
19,
20,
21,
22,
23]. Spectra on the Hahn space were studied in [
16,
24,
25]. A survey of recent results can also be found in [
18].
We generalize the definition of the space as follows.
Let
be a finite matrix with complex entries and
be a bounded sequence of positive real numbers. We define the set:
If is given by , and for and , then .
3. The Generalized Paranormed Hahn Space
Throughout, let be a sequence of positive real numbers and be an infinite matrix of complex entries. In this section, we show that the space is a totally paranormed space, if the sequence p is bounded.
The following holds.
Proposition 1. Let the sequence be bounded and . Then, is a paranormed space with: Proof. Throughout, we write for short:
- (i)
First, we show that is a linear space.
Let
. Then,
, and so, since
for all
k,
hence,
. Applying Minkowski’s inequality, we obtain:
Therefore, we proved that
Y is closed with respect to addition.
Now, we assume
and
. We put
, and obtained from
:
that
, and also:
hence,
. This completes Part (i) of the proof;
- (ii)
Now, we show that g is a total paranorm on Y.
Obviously,
satisfies (P.1), (P.2), and (P.3) and, by (
1), also (P.4) in Definition 1.
To prove (P.5), we assume that
is a sequence of elements in
Y with
and
is a sequence of scalars with
. It follows that:
where:
First,
implies
for all sufficiently large
n; hence:
We also have:
Finally, to show
, let
be given. Then, there exists
such that:
Now, we choose
such that:
Since
, we obtain for all
:
Hence, we also have
, and consequently, the condition in (P.5) of Definition 1 is satisfied. □
Remark 4. (a) If the matrix A is such that the mapis one to one, thenclearly is total; (b) If the sequence p is not bounded, thenneed not be a linear space, in general. For instance, if we choose, the identity matrix, then, and it is well known thatis not a linear space when p is unbounded ([26], Example 1.12 (a)). 4. Visibility and Contour
The computations and results of this section were used for the implementation of the methods in our software to create the figures in this paper. For this, we studied the visibility and contour problems for parts
of spheres of radius
in three-dimensional space
with respect to the restriction
on
of the paranorm
, where
A is an upper triangle. We recall that an infinite matrix
is said to be an
upper triangle if
and
for
. We identify the three-section
of any sequence
with the vector
. Let
be a
-matrix, which is an upper triangle, and
, then we write, as usual,
and define the
by:
where
(
Figure 1).
We assume that
has a parametric representation:
where
and
.
First, we solved the visibility problem.
We used central projection in and checked the visibility of any point on a given surface analytically. This means we had to compute the intersections of straight lines with the surface S.
We write . Since g is translation invariant by Remark 1, it is sufficient to solve the visibility problem for parts of spheres centered at zero.
We write for
:
Since
A is an upper triangle, its inverse
B exists, and
B is also an upper triangle with:
and
otherwise. We used the transformation formulae:
and obtained
if and only:
To solve the visibility problem for
, we had to find the intersection of
with any straight line
L, given by a parametric representation
, that is we had to find the solutions
of:
Now, the identity in (
7) yields
for
, and in particular,
By (
6) and (
7), we have to find the zeros
of the function
f with:
with
in (
8). We used the numerical methods described in detail in [
1], Section 6.1, to find the zeros of
f, preferably; however, one would use the bisection method, since it is the fastest one of the implemented methods.
We write
. Then, we obtain from (
5) and (
7):
and:
hence:
and:
Let
C denote the center of projection. Now, a point
is invisible (with respect to
) if, for
, there exist a zero
of the function
f in (
9) with corresponding
from (
8) and
from (
12).
Now, we have to find the zeros
of the function
f with:
that is
such that:
If
sgn
, then there exists no zero
of
. Otherwise, we obtain:
hence:
which yields:
if
, which is the case if
for
.
Furthermore, we must find the zeros
of:
Now, the transformation formulae in (
5) again yield (
10) and (
11), and we conclude as at the end of Case 1.
Now, we consider the contour problem. Let
P with the position vector
be a point of any surface
S and:
be the (un-normed) surface normal vector to
S at
P, where:
Then, we say that
P is a contour point of
S, if:
The set of all contour points is referred to as the contour (or silhouette) of S.
Now, we consider
. We put:
Then, we obtain for
and
:
and
.
If
denotes the position vector of the center of projection, then the contour points are given by the zeros in the domain
R of
S of the function:
For this, we used the numerical method to determine the zeros of a real-valued function of two real variables on a rectangle, described in detail in [
27].
5. Influence of the Parameters on the Shape of the Spheres in
We illustrate the influence of each parameter on the shape of the sphere.
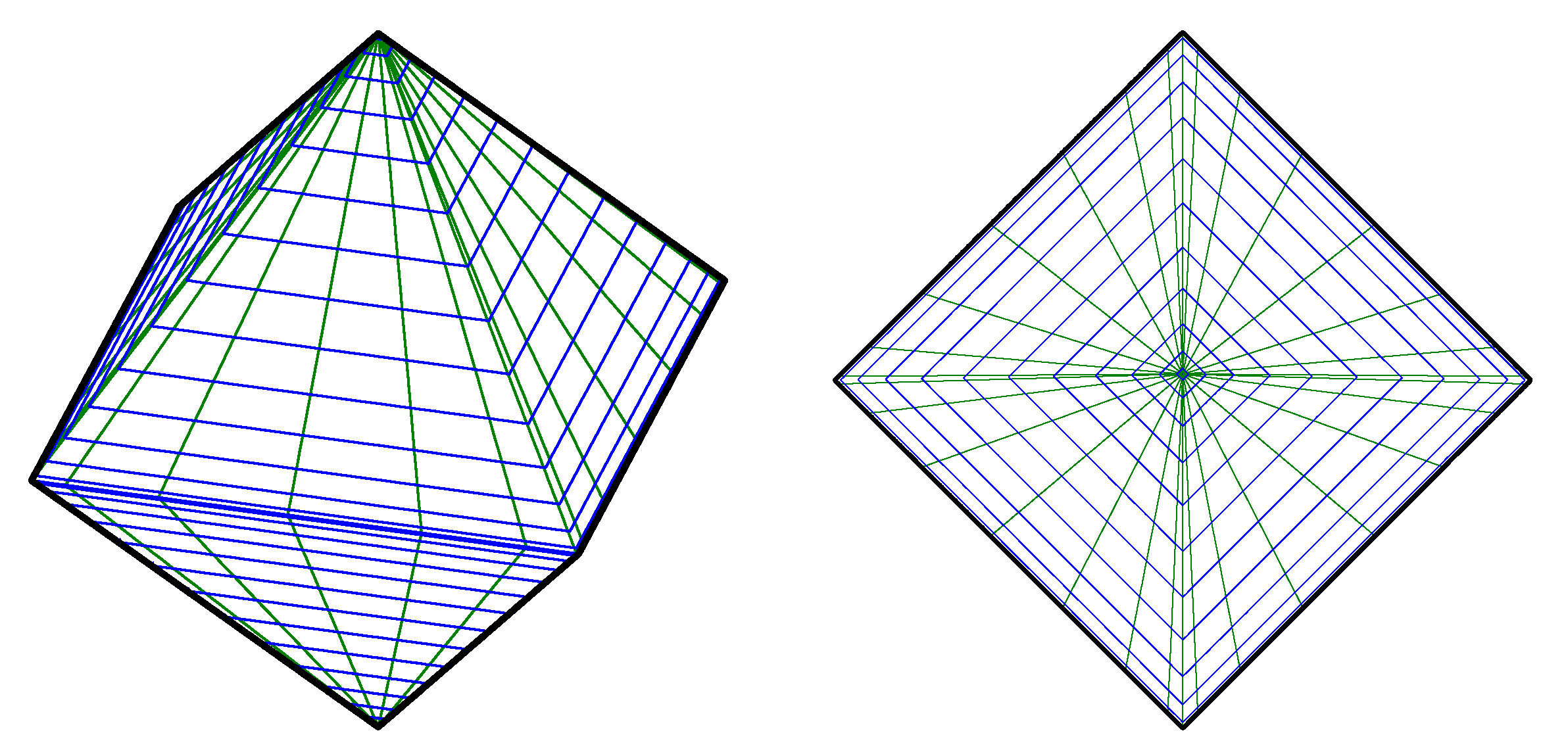
We start with the unit sphere where all exponents are equal to one and
, the identity matrix (
Figure 2):
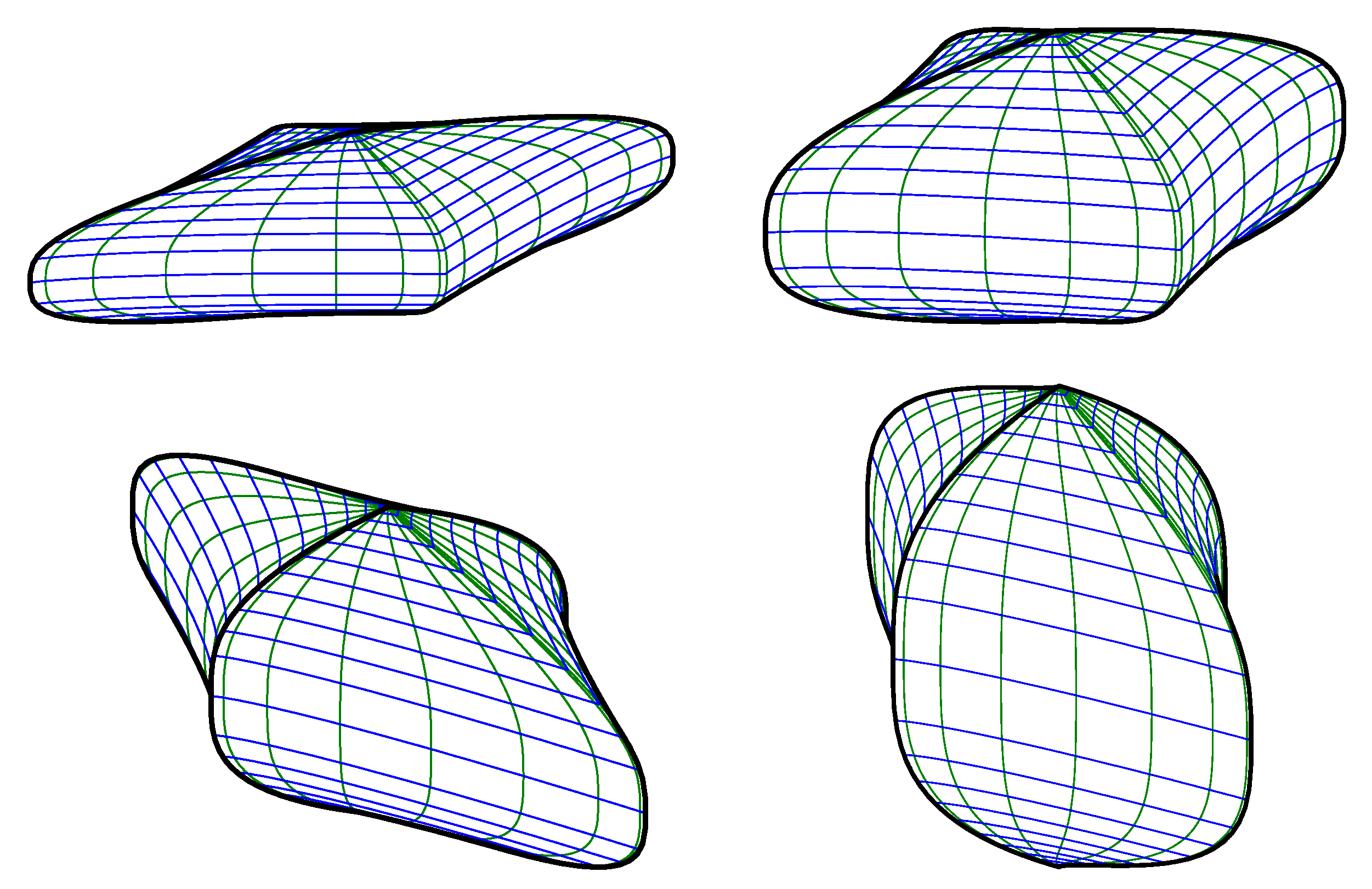
Now, we study the influence of the entries of the matrix
A. In
Figure 3, all exponents are equal to one, and the matrices
A are given below:
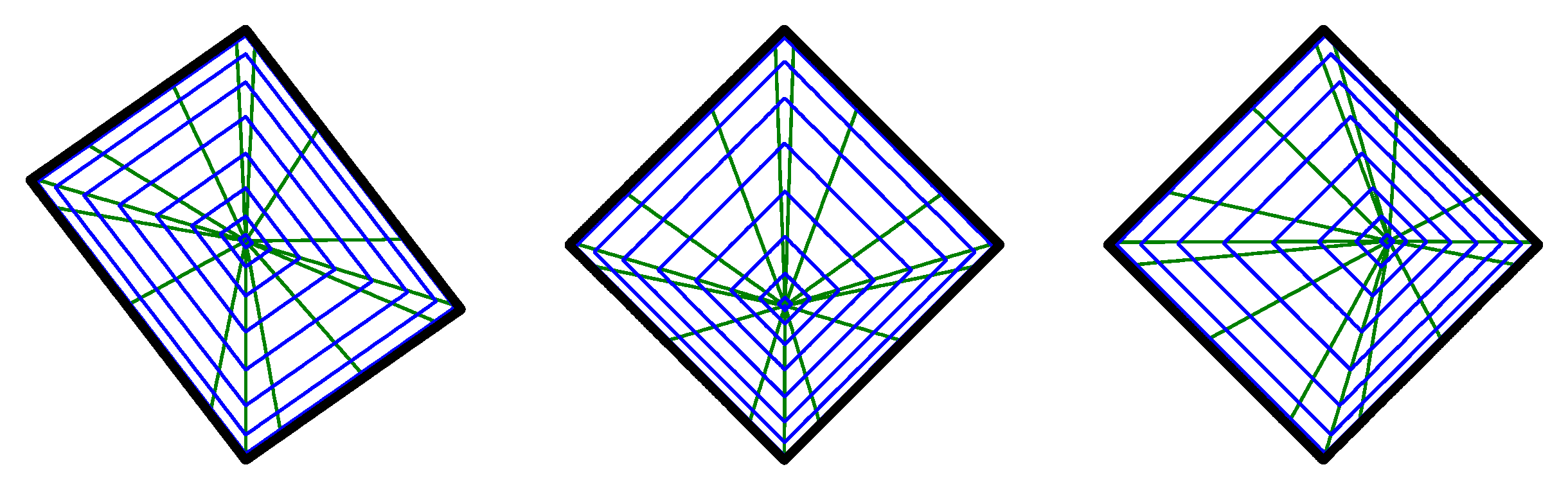
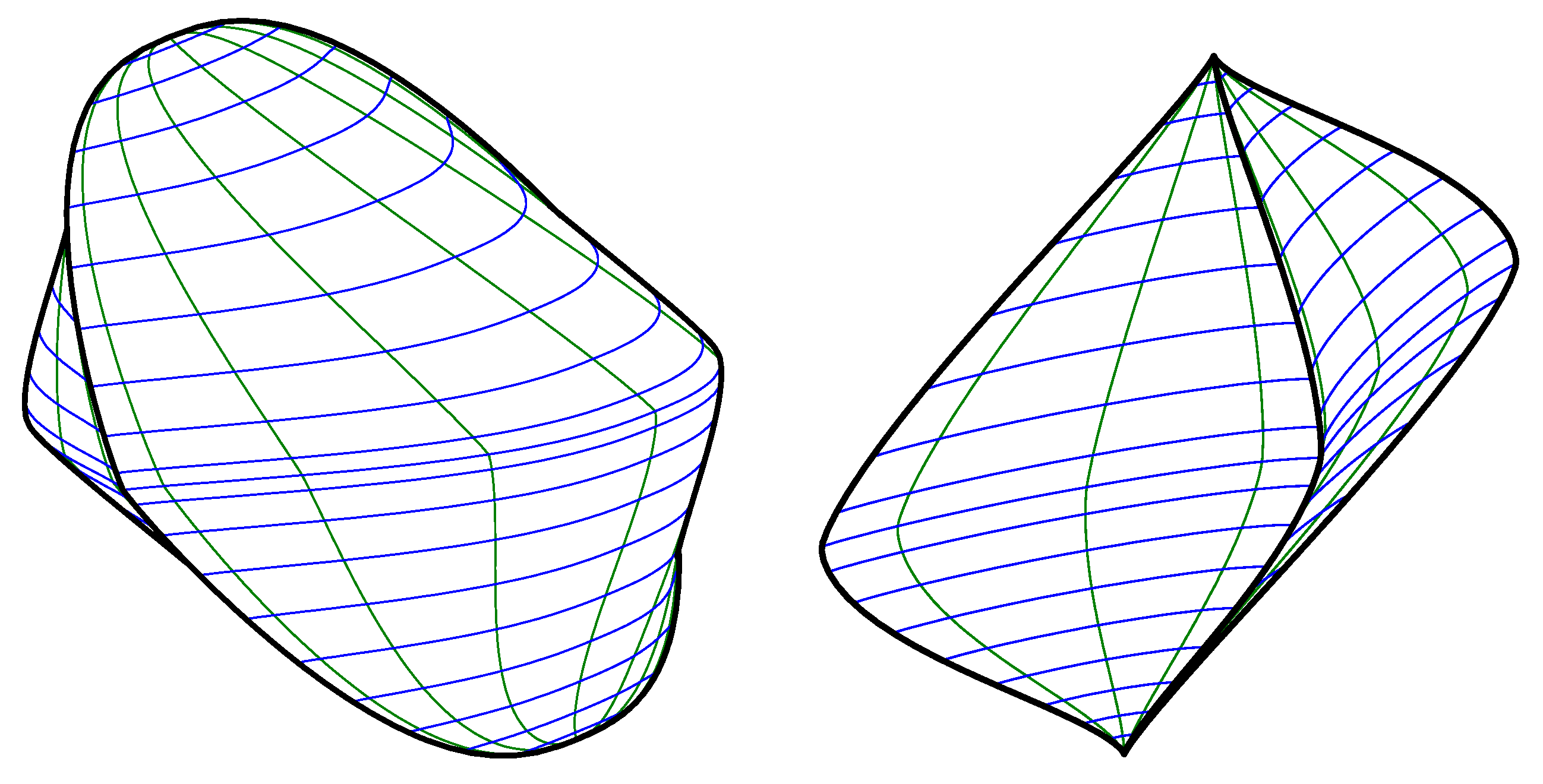
In
Figure 4, all exponents are equal to one, and the matrices
A are given below:
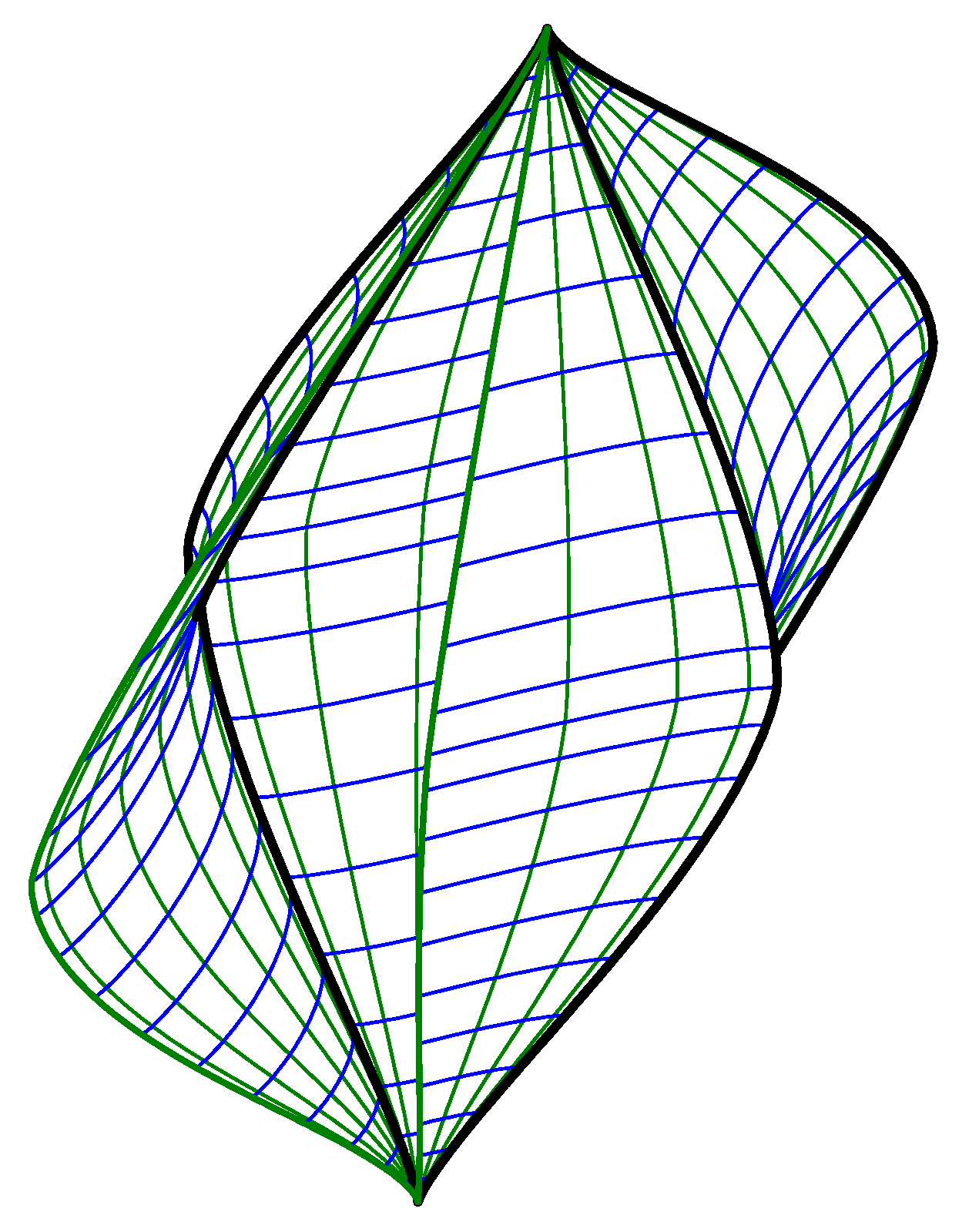
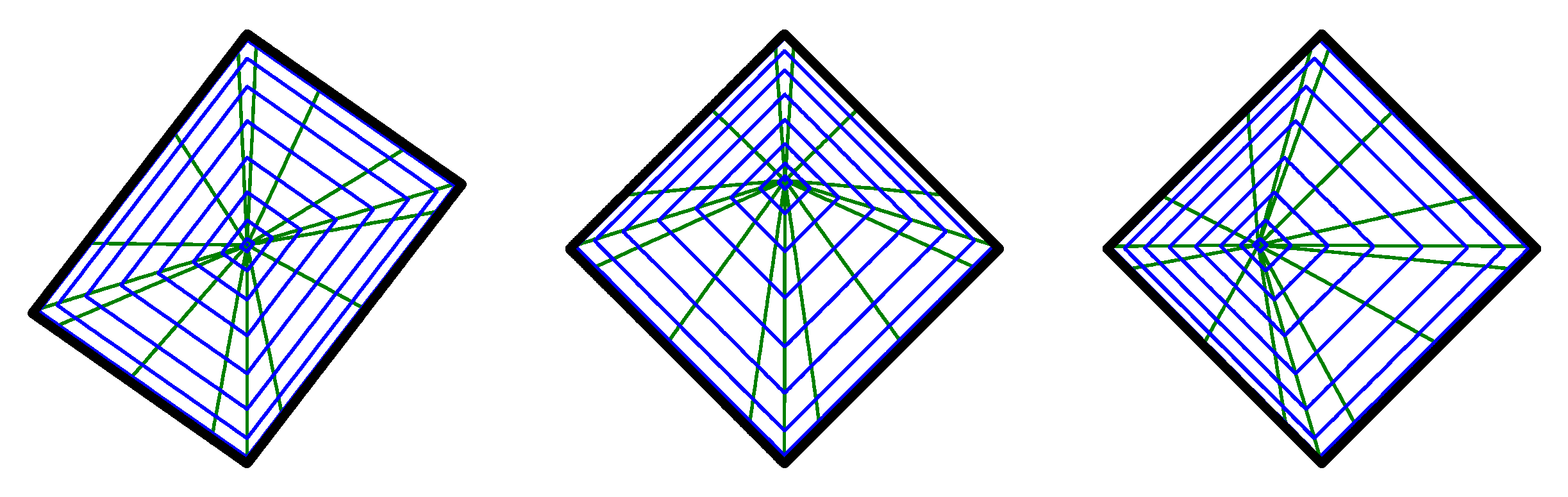
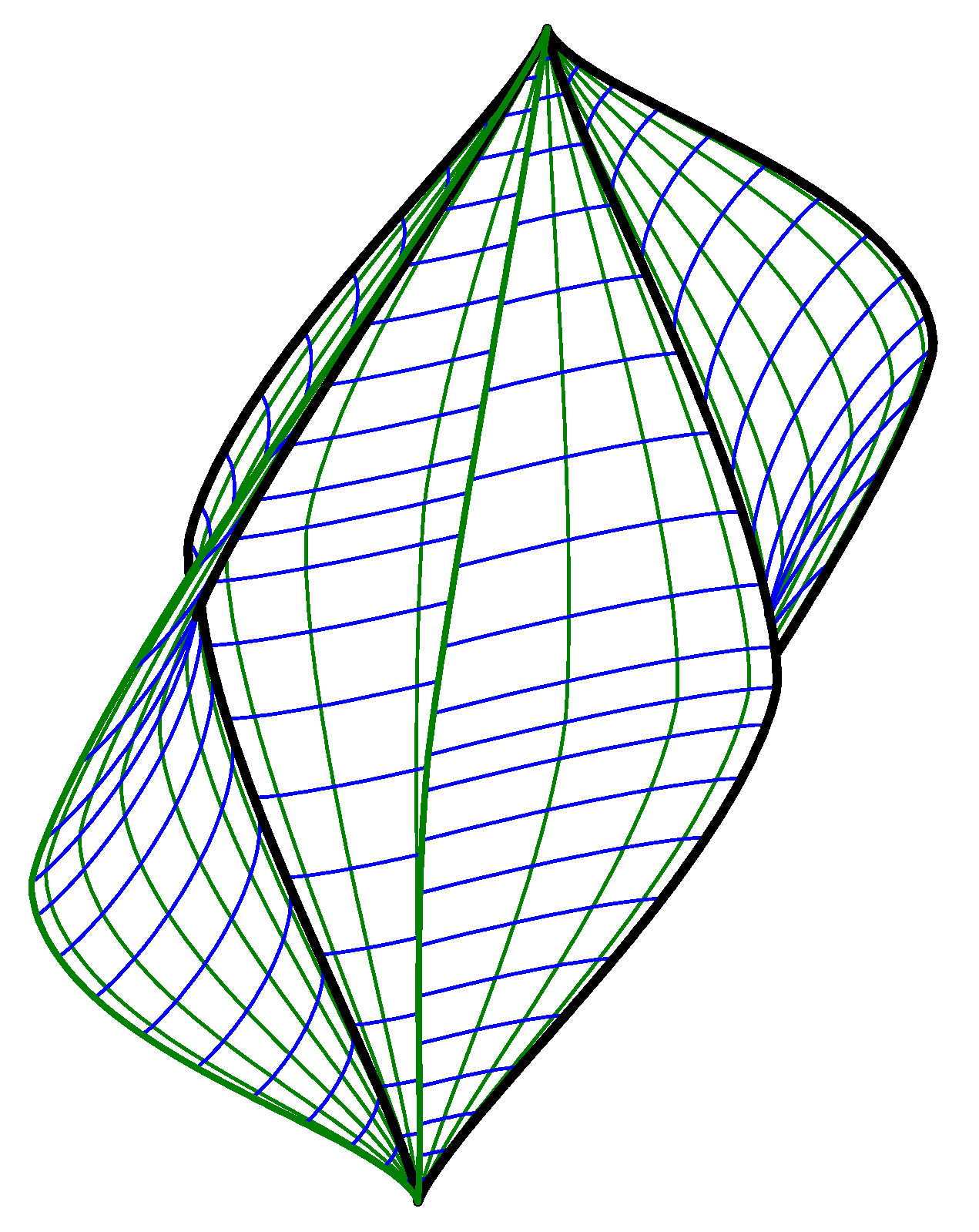
In
Figure 5, we show special cases. On the left, we show a sphere in the norm of
, for the parameters
, in the middle in the norm of the original Hahn space
h, for the parameters
,
,
, and on the right in the norm of the generalized Hahn space
with the parameters
,
,
. All the exponents are equal to one, and the matrix
A is:
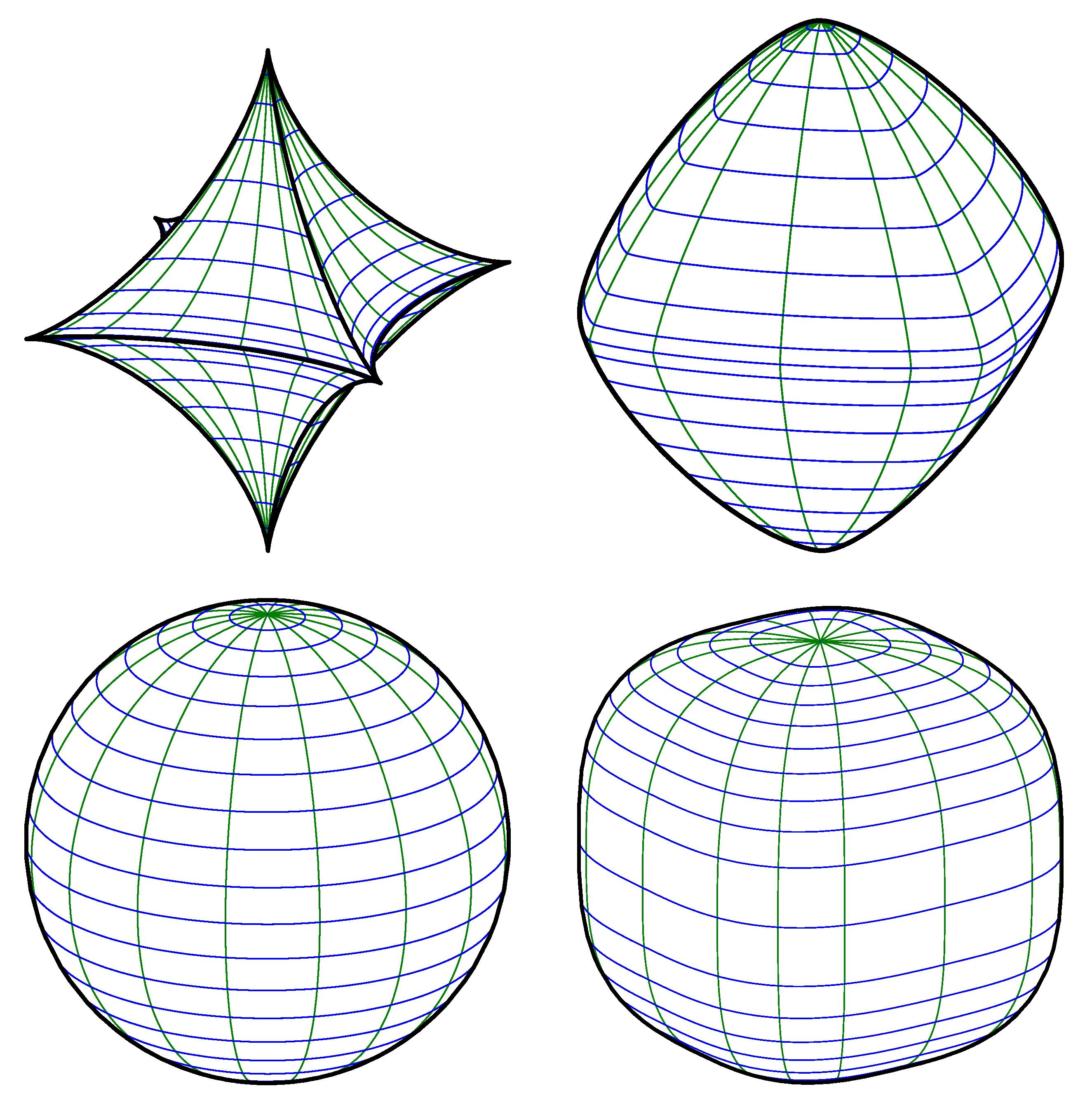
Varying the exponents results in a change of the shape of the spheres. We show the unit sphere with identity matrix A.
First, we considered spheres with equal exponents in each sphere.
Figure 6 shows the unit spheres with the exponents
for
, where
,
, 2, and 3, that is with respect to the metric of
, and the norms of
,
, and
. Left on the bottom is the ordinary Euclidean sphere.
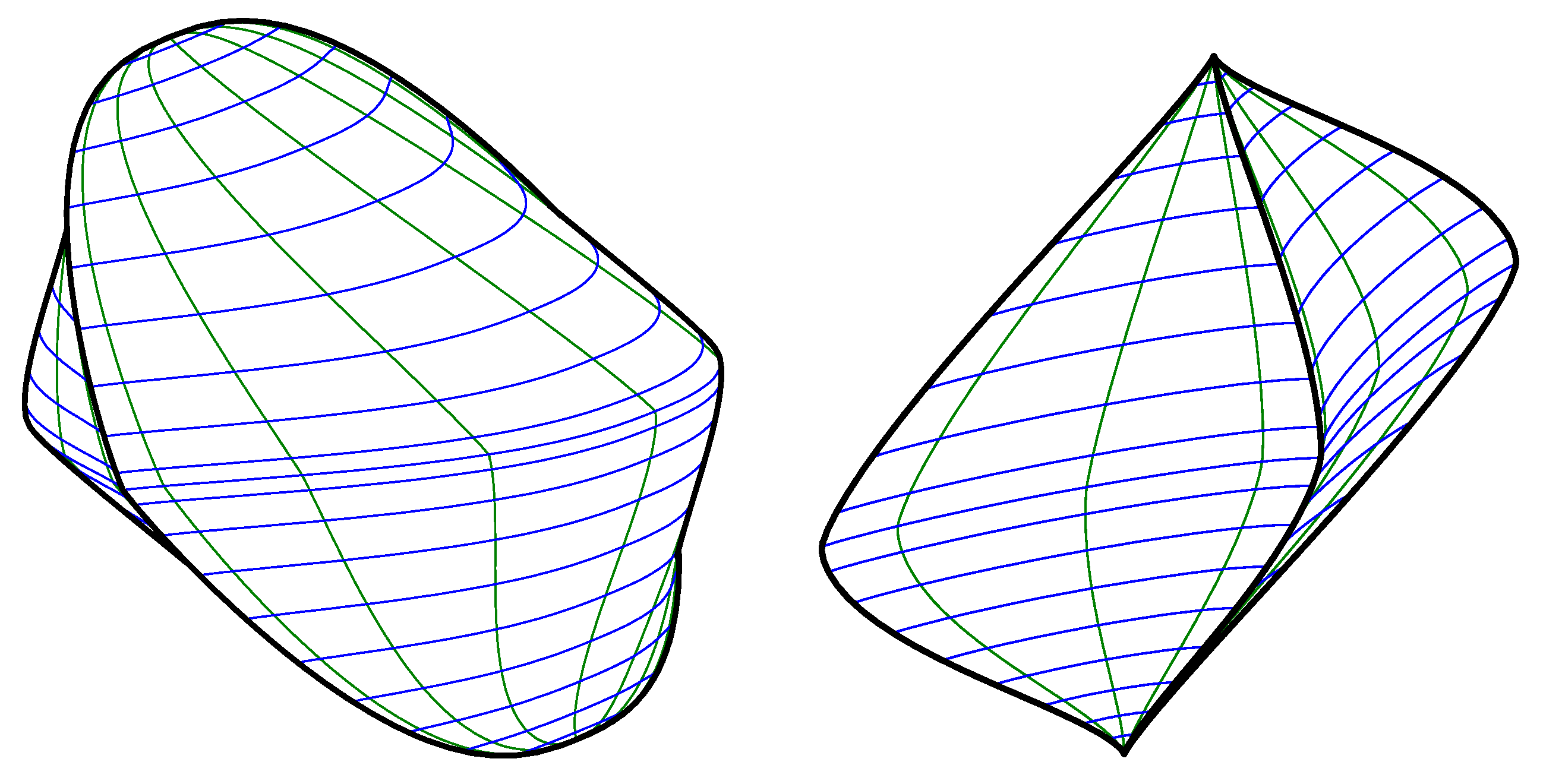
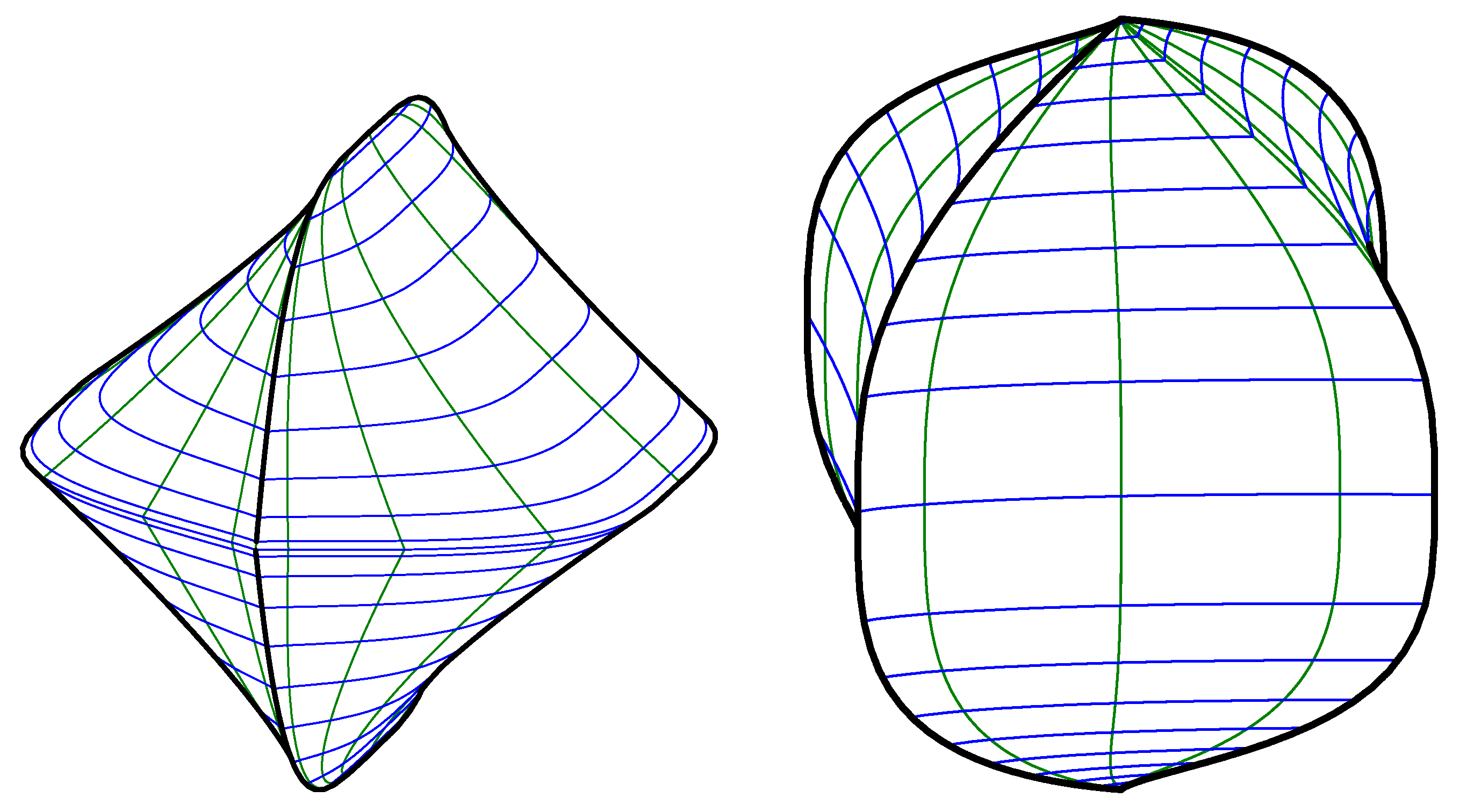
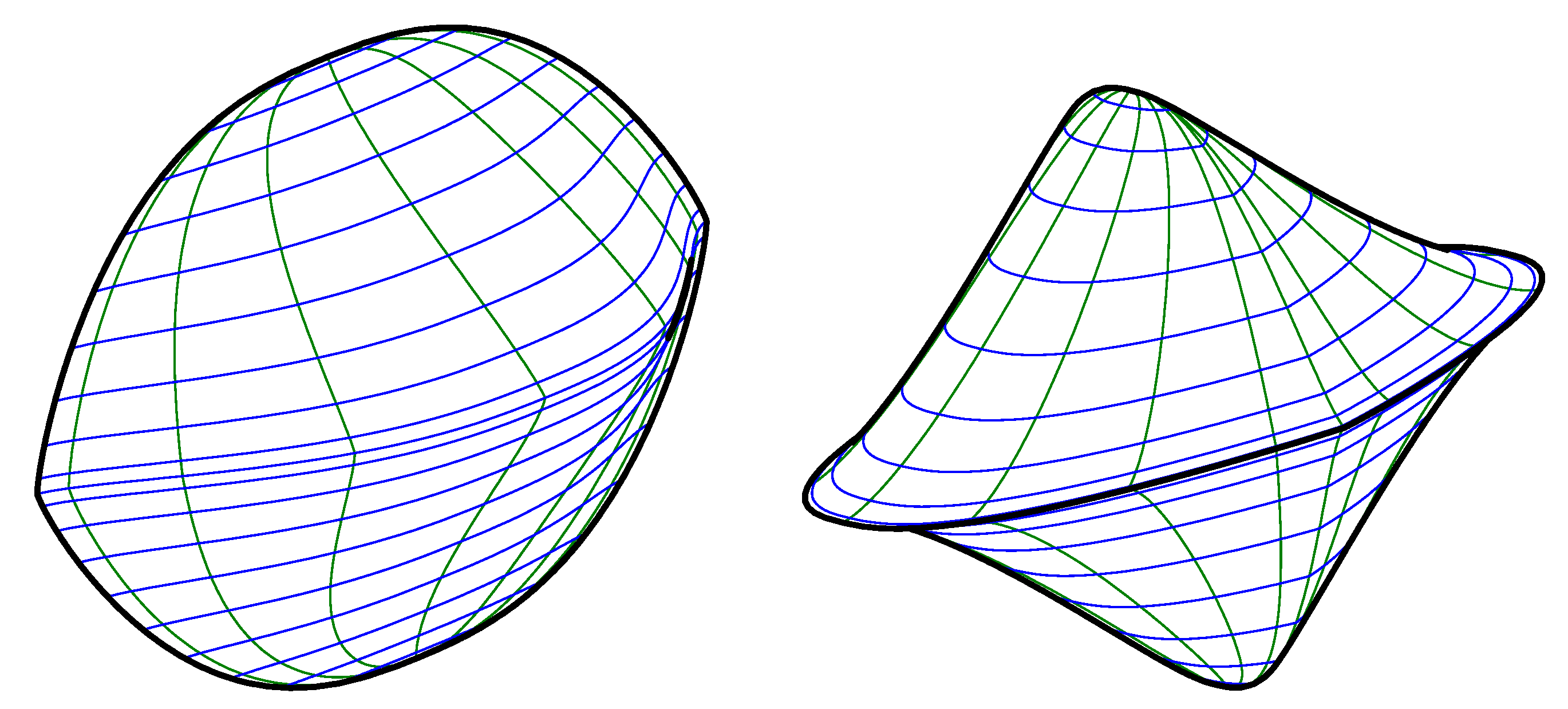
If the exponents are different, the shape of the sphere is more interesting. We considered the unit sphere with the identity matrix
A. On the left in
Figure 7, the exponents are
,
,
, and on the right, they are
,
,
.
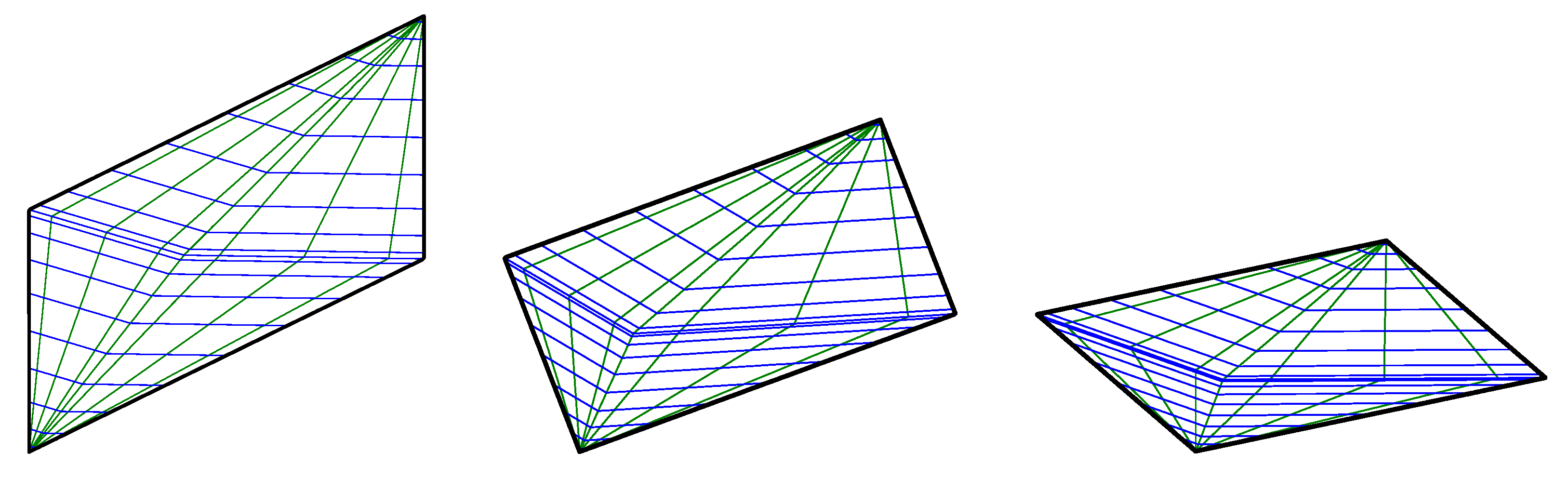
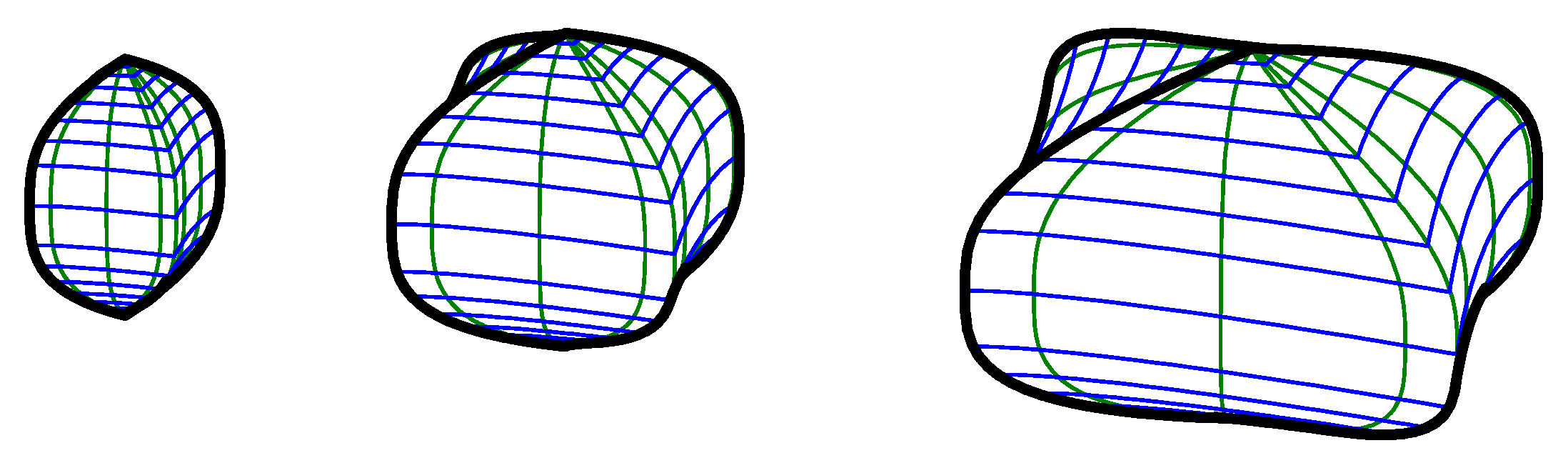
Now, we demonstrate the influence of the radius. In
Figure 8, we chose the spheres with identity matrix
A and the exponents
,
,
. The radii vary from left to right with the values
,
, and
. We observed that not only the size increased, but the spheres also stretched out differently in different dimensions due to the exponents. Note that the same sphere of radius one is shown on the right side of
Figure 7.
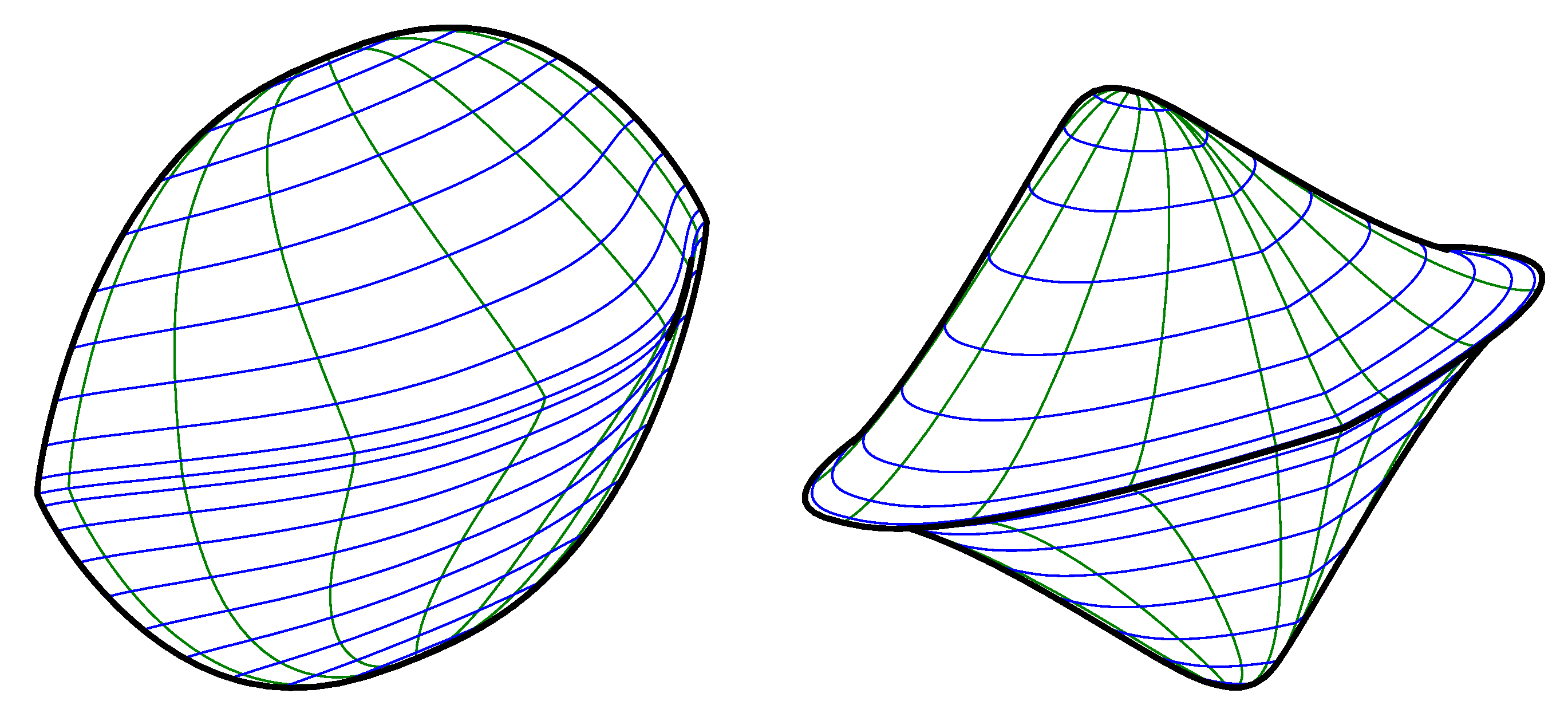
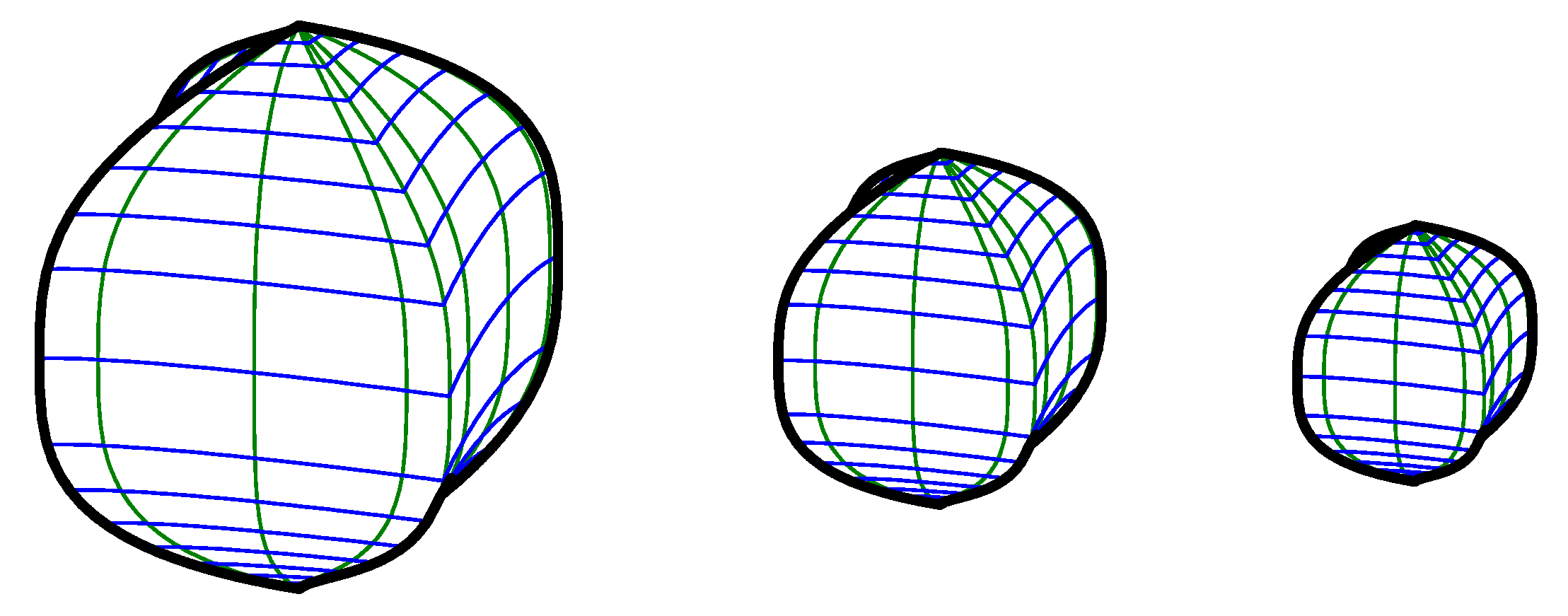
Now, we consider the case when A is a diagonal matrix, but not the identity.
In
Figure 9, the exponents are
,
,
, as on the right in
Figure 7 and
Figure 8. However, now, the values on the diagonal are equal to
in the diagonal matrix
A on the left,
in the middle, and
on the right. Note that as the entries increase, the sizes of the spheres decrease, but their shapes do not change.
In
Figure 10, the exponents are the same as in the previous figure,
,
,
, but the values on the diagonal of the matrix
A are different:
We can also change the entries of the matrix
A and the exponents
at the same time. On the left in
Figure 11, the exponents are
,
,
, and on the right, they are
,
,
. The matrices are:
Finally, on the left in
Figure 12, the exponents are
,
,
, and on the right, they are
,
,
; the matrices are the same:
6. Conclusions
We introduced the generalized Hahn space for upper triangle matrices A and sequences of positive real numbers and showed that is a linear metric space with its natural paranorm, if the sequence p is bounded. We also noted that need not be a linear space, if the sequence p is unbounded.
We applied our own software to visualize the shapes of parts of spheres in three-dimensional space endowed with the relative paranorm . Furthermore, we developed the parametric representation of these spheres and solved their visibility and contour (silhouette) problems. Finally, we demonstrated the effects of the change of the matrices A and the sequences p on the shape of the spheres.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}