In this section, we present our algorithm to solve linear systems and differential problems. All computational experiments were written in Matlab 2022b and conducted on a Processor Intel(R) Core(TM) i7-9700 CPU @ 3.00 GHz, 3000 Mhz, with 8 cores and 8 logical processors.
4.1. Linear System Problems
We now consider the linear system:
where
is a linear and positive operator and
. Then, the linear system (
12) has a unique solution. There are many different ways of rearranging Equation (
12) in the form of fixed point equation
. For example, the well-known weight Jacobi (WJ) and successive over relaxation (SOR) methods [
12,
20,
21] provide the linear system (
12) as the fixed point equation
and
.
From
Table 1, we set
is the weight parameter; the diagonal component of matrix
A is
D, whereas the lower triangular component of matrix
is
L.
Setting
, where
, we can see that
where
S is an operator with
. In controlling the operators
and
in the form of
where
and
where
It follows from (
13) that
and
are nonexpansive mapping, and their weight parameter needs to be appropriately adjusted. The weight parameter
implemented for the operator
of the WJ and SOR methods has a norm less than one. Moreover, the optimal weight parameter
in obtaining the smallest norm for each type of operator
is indicated in
Table 2.
The parameters
and
are the maximum and minimum eigenvalue of matrix
, respectively, and
is the spectral radius of the iteration matrix of the Jacobi method (
with
). Thus, we can convert this linear system into fixed point equations to obtain the solution of the linear system (
12).
where
is the common solution of Equation (
14). By utilizing the nonexpansive mapping
, we provide a new parallel iterative method in solving the common solution of Equation (
14). Iteratively, the generated sequence
is produced by using two initial data
and
where
are appropriate real sequences in
and
f is a contraction mapping. The stopping criterion is employed as follows:
and after that, set
and
.
Next, the proposed method (
15) was compared with the well-known WJ, SOR, and Gauss–Seidel (the SOR method with
, called the GS method) methods in obtaining the solution of the linear system:
and
,
with
. For simplicity, the proposed method (
15) with
and the nonexpansive mapping
T are chosen from
, and
, and
. The results of the WJ, GS, SOR, and proposed methods are given for the following cases:
- Case 1.
The proposed method with ;
- Case 2.
The proposed method with ;
- Case 3.
The proposed method with ;
- Case 4.
The proposed method with –;
- Case 5.
The proposed method with –;
- Case 6.
The proposed method with –;
- Case 7.
The proposed method with ––.
These are demonstrated and discussed for solving the linear system (
16). The weight parameter
of the proposed methods is set as its optimum weight parameter (
) defined in
Table 2. We used the following parameters:
, and
where
is the number of iterations at which we want to stop with
. The estimated error per iteration step for all cases was measured by using the relative error
.
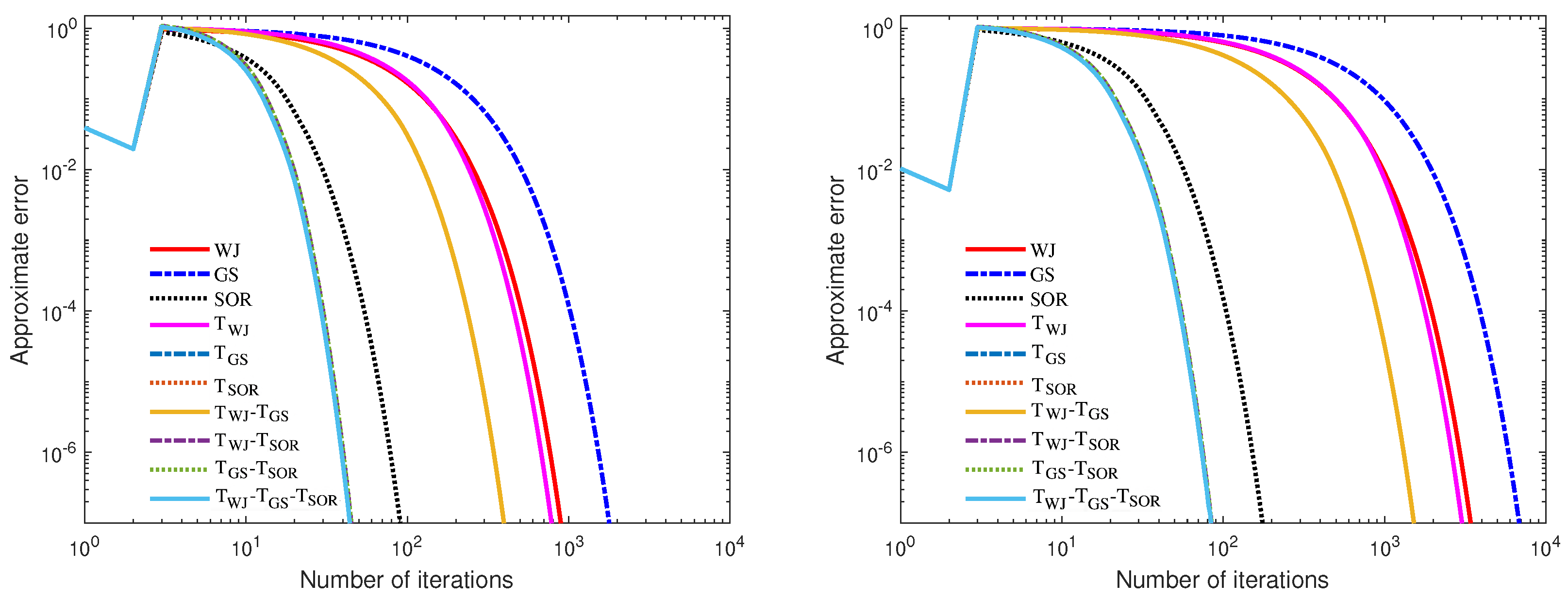
Figure 1 shows the estimated error per iteration step for all cases with
and
.
The trend of the number of iterations for the WJ, GS, and SOR methods and all case studies of the proposed methods in solving the linear system (
16) with
and
is shown in
Figure 2.
Figure 1 and
Figure 2 show that the proposed method using
was better than the WJ method, the proposed method with
was better than the GS method, and the proposed method with
was better than SOR method when the speed of convergence and the number of iterations are compared. We also found that, when the proposed method with
was used (parallel algorithm), the number of iterations was based on the minimum number of iterations used in the nonparallel proposed methods. That is, when the parallel algorithms were used, it can be seen from
Figure 2 that the number of iterations of the proposed method with
–
was the same as the proposed method with
and the number of iterations of the proposed method with
–
,
–
,
–
–
was the same as the proposed method with
. As a result of the parallel algorithm in which
was used as its partial components (The proposed methods with
–
,
–
,
–
–
), this will give us the fastest convergence.
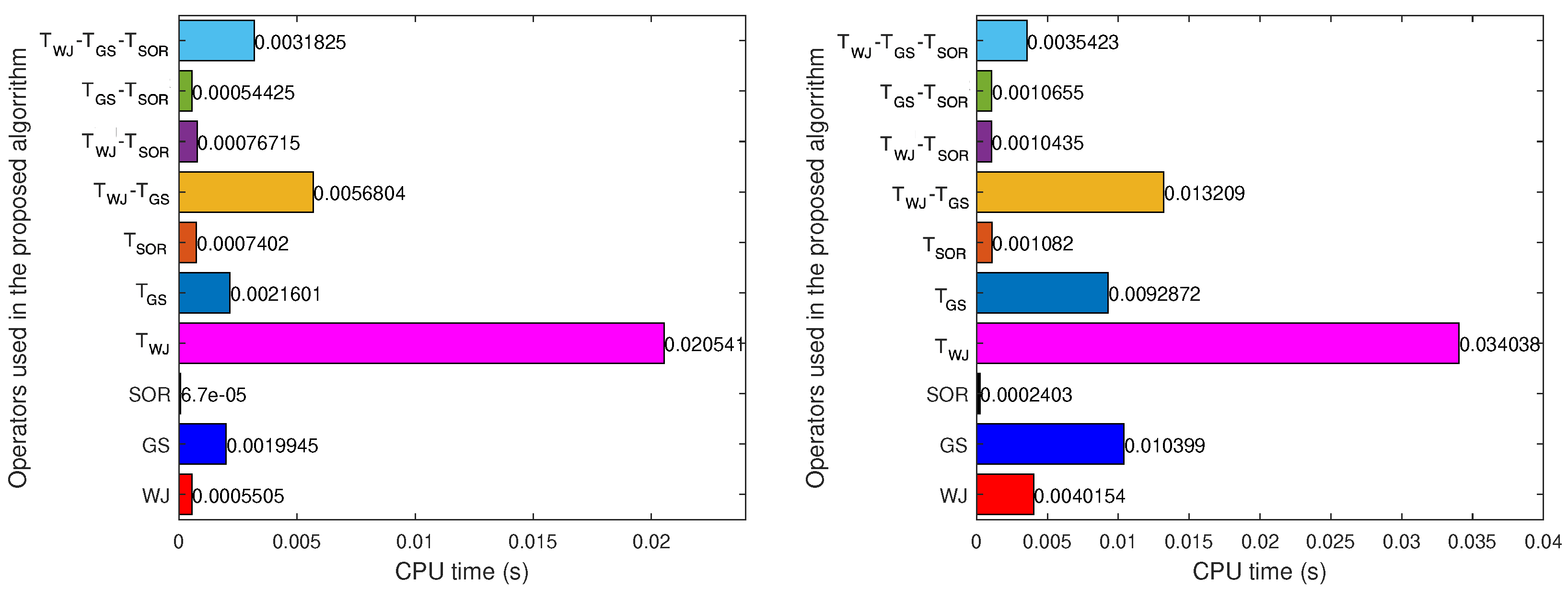
Figure 3 shows that the CPU time of the SOR method was better than the other methods. However, the CPU time of the proposed method using the parallel technique
–
–
was better, close to the SOR method as compared to the other way, when the grid size of matrix
A was increased.
Next, we provide a comparison of proposed algorithm with the PMHM, HTI, and VAM (where
is the
-mapping, which was introduced by Shimoji and Takahashi [
22] with setting
). For the parameter in the HTI and VAM, we chose
. Let
in the VAM algorithm and
in the HTI algorithm. The results are reported in
Table 3 and
Figure 4.
From
Table 3 and
Figure 4, we see that the CPU time and the number of iterations of the proposed algorithm were better than the PMHM, HTI, and VAM.
4.2. Differential Problems
Consider the following simple and well-known periodic heat problem with Dirichlet boundary conditions (DBCs) and initial data:
where
is constant,
represents the temperature at points
and
, and
and
are sufficiently smooth functions. Below, we use the notations
and
to represent the approximate numerical values of
and
, and
, where
denotes the size of the temporal mesh. The following well-known Crank–Nicolson-type scheme [
12,
21] is the foundation for a set of schemes used to solve the heat problem (
20):
with initial data:
and DBCs:
To approximate the term of
, we used the standard centered discretization with space. The matrix form of the well-known second-order finite difference scheme (FDS) in solving the heat problem (
20) can be written as
where
:
,
, and
,
. According to Equation (
24), matrix
A is square and symmetrically positive definite. This scheme uses a three-point stencil and reaches the second-order approximation with time and space. The scheme (
21) is consistent with the problem (
20). The required and sufficient criterion for the stability of the scheme (
21) is
(see [
12]).
The discretization of the considered problem (
24) has traditionally been solved using iterative methods. Here, the well-known WJ and SOR methods were chosen as examples (see
Table 4).
The weight parameter is
; the diagonal component of matrix
A is
D; the lower triangular part of matrix
is
L. Moreover, the optimal weight parameter
is also indicated with the same formula in
Table 2. The step sizes of the time play an important role in the stability needed for the WJ and SOR methods in solving the linear systems (
24) generated from the discretization of the considered problem (
20). The discussion on the stability of the WJ and SOR methods in solving the linear systems (
24) can be found in [
20,
21].
Let us consider the linear system:
where
is a linear and positive operator and
. We transformed this linear system into the form of a fixed point equation
to determine the solution of the linear system (
25). For example, the well-known WJ, SOR, and GS approaches present the linear system (
25) as a fixed point equation (see
Table 5).
We introduced a new parallel iterative method using the nonexpansive mapping
. Iteratively, the generated sequence
is created by employing two initial data
and
where the second superscript “
s”,
, denotes the number of iterations,
are appropriate real sequences in
, and
f is a contraction mapping. The following stopping criteria were employed:
where
” denotes the last iteration at time
, and then, we set
Next, the proposed method (
26) in obtaining the solution of the problem (
24) generated from the discretization of the heat problem with DBCs and the initial data (
20) was then compared to the well-known WJ, GS, and SOR methods with their optimal parameters. The proposed method (
26) with
and the nonexpansive mapping
T chosen from
, and
were compared.
Let us consider the simple heat problems:
The results of the WJ, GS, and SOR methods were compared with all case studies of the proposed methods, which is the same as
Section 4.1. Because we focused on the convergence of the proposed method, the stability analysis in selecting the time step sizes is not described in depth. The proposed methods’ time step size was based on the least step size selected from the WJ and SOR methods in solving the problem (
24) obtained from the discretization of the considered problem (
27).
All computations were carried out on a uniform grid of
N nodes, which corresponds to the solution of the problem (
24) with
sizes of matrix
A and
. The weight parameter
of the proposed method is defined as the optimum weight parameter (
) in
Table 2.
We used
,
,
, the default parameters
, and the function
f set as Equations (
17)–(
19) and
where
is the number of iterations at which we want to stop. For testing purposes only, all computations were carried out for
(when
).
Figure 5 shows the approximate solution of the problem (
27) with 101 nodes at
by using the WJ, GS, and SOR methods and the proposed methods.
It can be seen from
Figure 5 that all numerical solutions matched the analytical solution reasonably well.
Figure 6 shows the trend of the iteration number for the WJ, GS, and SOR methods and the proposed methods in solving the problem (
24) generated from the discretization of the considered problem (
27) with 101 nodes. It was found that the proposed method with
was better than the WJ method, the proposed method with
was better than the GS method, and the proposed method with
was better than the SOR method when the number of iterations was compared.
We see that the number of iterations of the proposed method with depends on the minimum number of iterations of the nonparallel proposed methods used. That is, the number of iterations of the proposed method at each time step with – was the same as the proposed method with , and the number of iterations at each time step of the proposed methods with –, –, and –– was the same as the proposed method with .
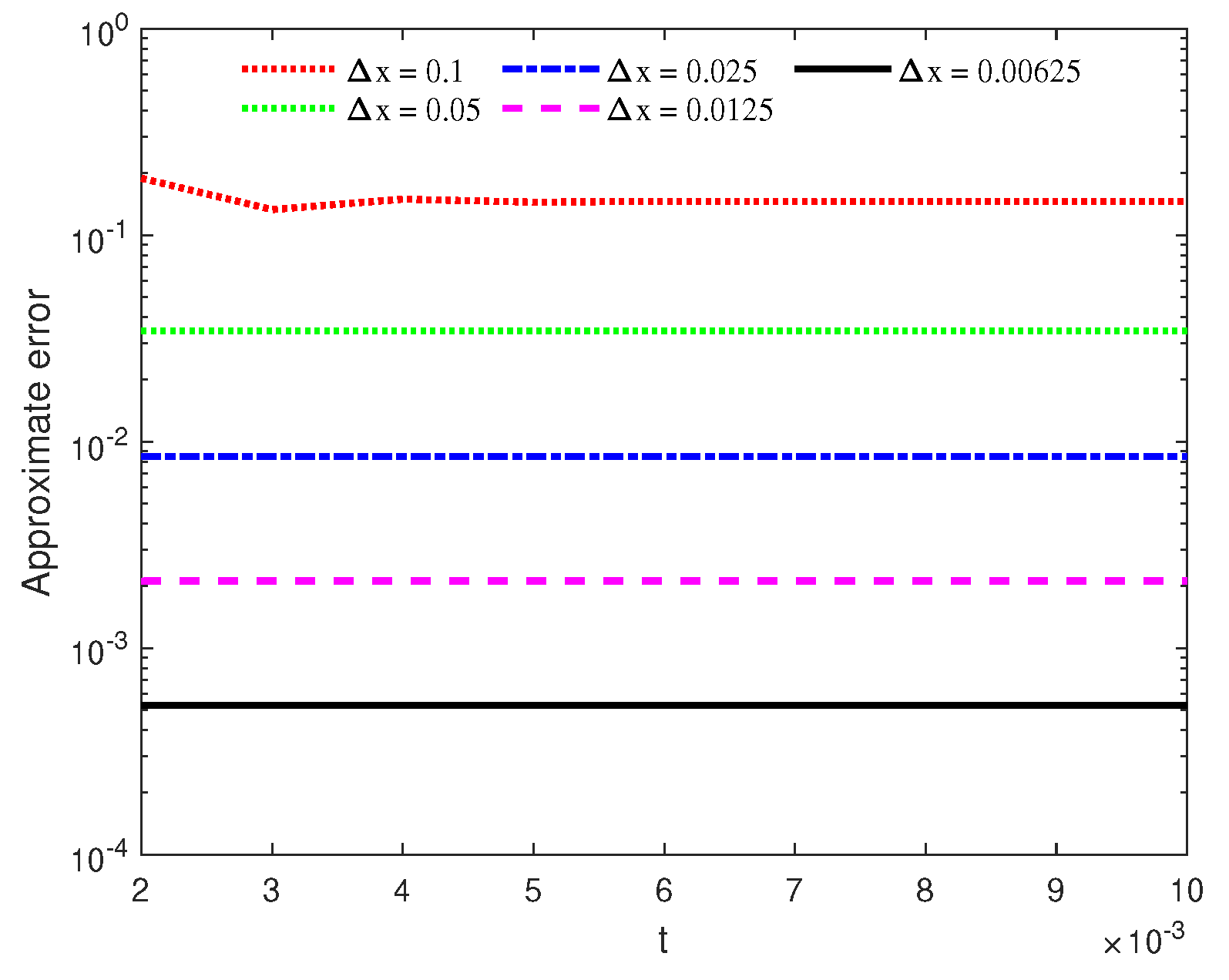
Next, the proposed method with
–
–
was chosen in solving the problem (
24) generated from the discretization of the considered problem (
27) to test and verify the order of accuracy for the presented FDS in solving the heat problem. All computations were carried out on uniform grids of 11, 21, 41, 81, and 161 nodes, which correspond to the solution of the discretization of the heat problem (
27) with
= 0.1, 0.05, 0.025, 0.0125, and 0.0625, respectively. The evolution of their relative error
at each time step reached under the acceptable tolerance
for the numerical solution of the heat problem problem with various grid sizes is shown in
Figure 7.
When the distance between the graphs of all computational grid sizes was examined, the proposed method using
–
–
was shown to have second-order accuracy. That is, the order of the accuracy of the proposed method using
–
–
corresponds to the FDS construction.
Figure 8 shows the trend of the iteration number for the WJ, GS, and SOR methods compared with all cases of the proposed methods in solving the discretization of the considered problem (
27) with varying grid sizes.
It can be seen that, when the grid size was small, the parallel algorithm in which the or was used as its partial components gave us the lowest number of iterations under the accepted tolerance.
From
Figure 9, we see that the CPU time of the SOR method was better than the other methods. However, the CPU time of the proposed method using the parallel technique
–
–
was better, close to the SOR method as compared to the other way, when the grid size of matrix
A was increased.
Next, we provide a comparison of the proposed algorithm with the PMHM, HTI, and VAM (where
is a
mapping, which was introduced by Shimoji and Takahashi [
22] with setting
). As the parameter in the HTI and VAM, we chose
. Let
in the VAM algorithm and
in the HTI algorithm. The results are reported in
Figure 10 and
Figure 11.
From
Figure 10 and
Figure 11, we see that the CPU time and number of iterations of the proposed algorithm were better than the PMHM, HTI, and VAM.
Moreover, the our method can solve many real-word problems such as image and signal processing, optimal control, regression, and classification problems by setting as the proximal gradient operator. Therefore, we present the examples of the signal recovery in the next.
4.3. Signal Recovery
In this part, we present some numerical examples of the signal recovery by the proposed methods. A signal recovery problem can be modeled as the following underdetermined linear equation system:
where
is the original signal and
is the observed signal, which is squashed by the filter matrix
and noise
. It is well known that the problem (
29) can be solved by the LASSO problem:
where
. As a result, various techniques and iterative schemes have been developed over the years to solve the LASSO problem; see [
15,
16]. In this case, we set
, where
and
. It is known that
T is a nonexpansive mapping when
, and
L is the Lipschitz constant of
.
The goal in this paper was to remove noise without knowing the type of filter and noise. Thus, we are interested in the following problem:
where
u is the original signal,
is a bounded linear operator, and
is an observed signal with noise for all
We can apply Algorithm 1 to solve the problem (
31) by setting
.
In our experiment, the sparse vector
was generated by the uniform distribution in [−2, 2] with
n nonzero elements.
were generated by the normal distribution matrix
, respectively, with white Gaussian noise such that the signal-to-noise ratio (SNR) = 40. The initial point
was picked randomly. We used the mean-squared error (MSE) for estimating the restoration accuracy, which is defined as follows:
where
is the estimated signal of
u.
In what follows, let the step size parameter
for all
, when the contraction mapping
is defined by
. We study the convergence behavior of the sequence
when
where
K is the number of iterations at which we want to stop.
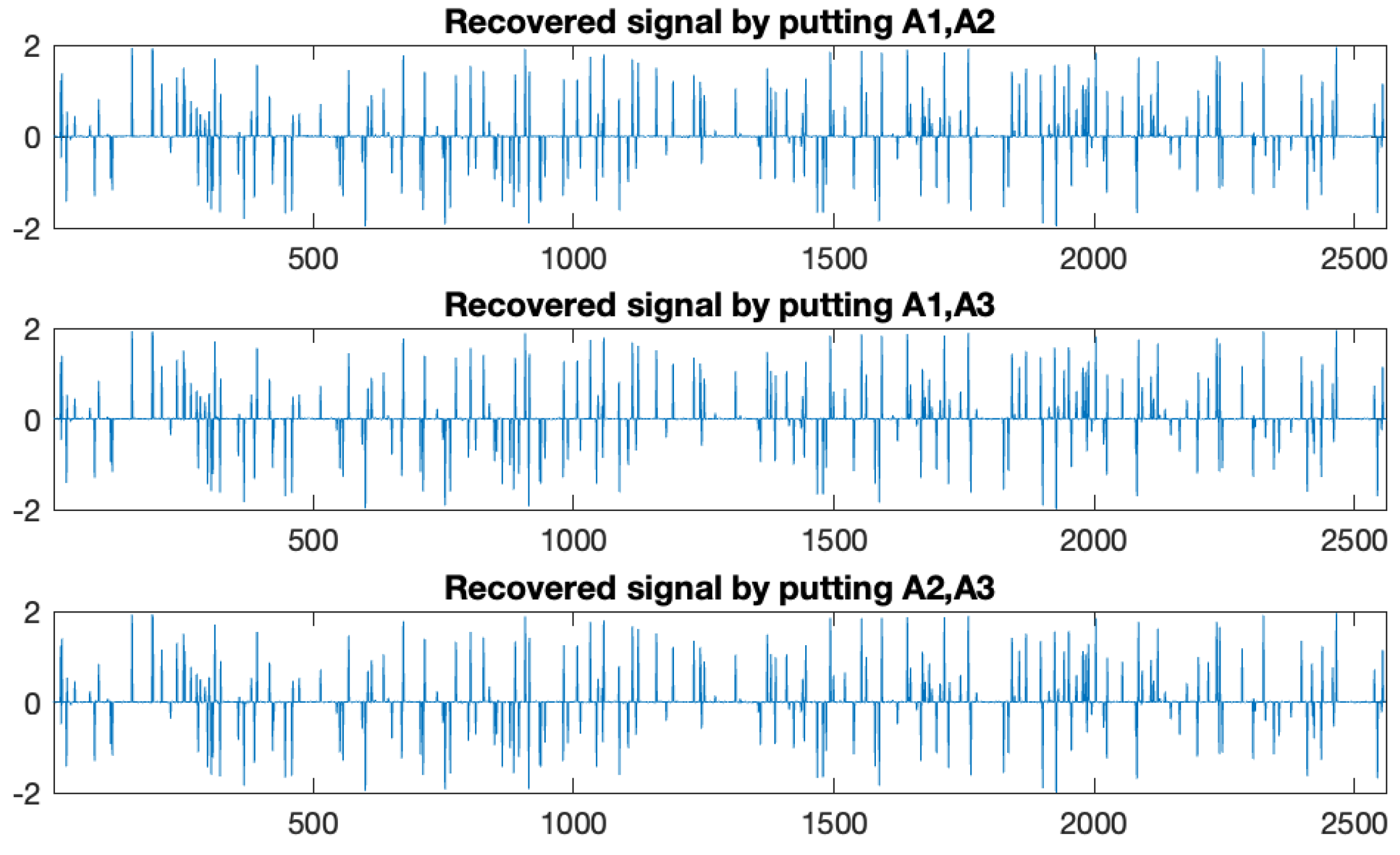
The iterative scheme was varied by choosing different in the following cases:
- Case 1.
;
- Case 2.
;
- Case 3.
;
- Case 4.
;
- Case 5.
;
- Case 6.
.
We set the number of iterations at which we wanted to stop
10,000, and in all cases, we set
,
, and
. The results are reported in
Table 6.
From
Table 6, it is shown that the parameter
depends on
using the number of iterations with the CPU time of our algorithm more than the other
. Furthermore, we see that the case of inputting had a lower number of iterations and CPU time than the case of inputting
and
for all of the cases. This means that the efficiency of the proposed algorithm is better when the number of subproblems is increasing.
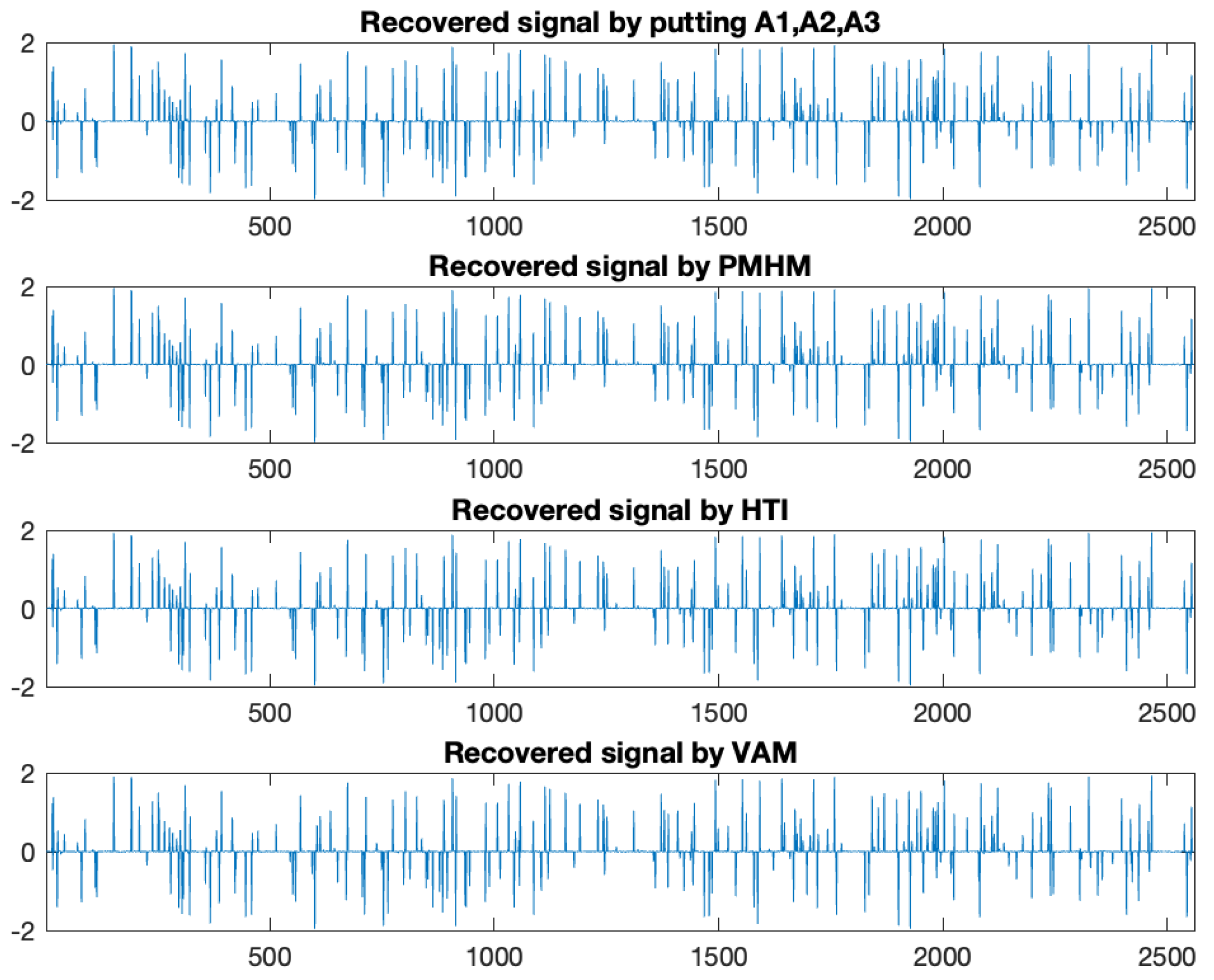
Next, we provide a comparison of the proposed algorithm with the PMHM, HTI, and VAM (where
is a
-mapping, which was introduced by Shimoji and Takahashi [
22] with setting
). We set the parameter in the PMHM algorithm as
. The parameter in the HTI and VAM was chosen as
and
. Let
in the VAM algorithm and
in the HTI algorithm. We plot the number of iterations versus the mean-squared error (MSE) and the original signal, observation data, and recovered signal for one case with
, and
. The results are reported in
Table 7.
From
Table 7, we see by the MSE values that our algorithm using the parallel method was faster than the PMHM, HTI, and VAM in terms of the number of iterations and the CPU time.
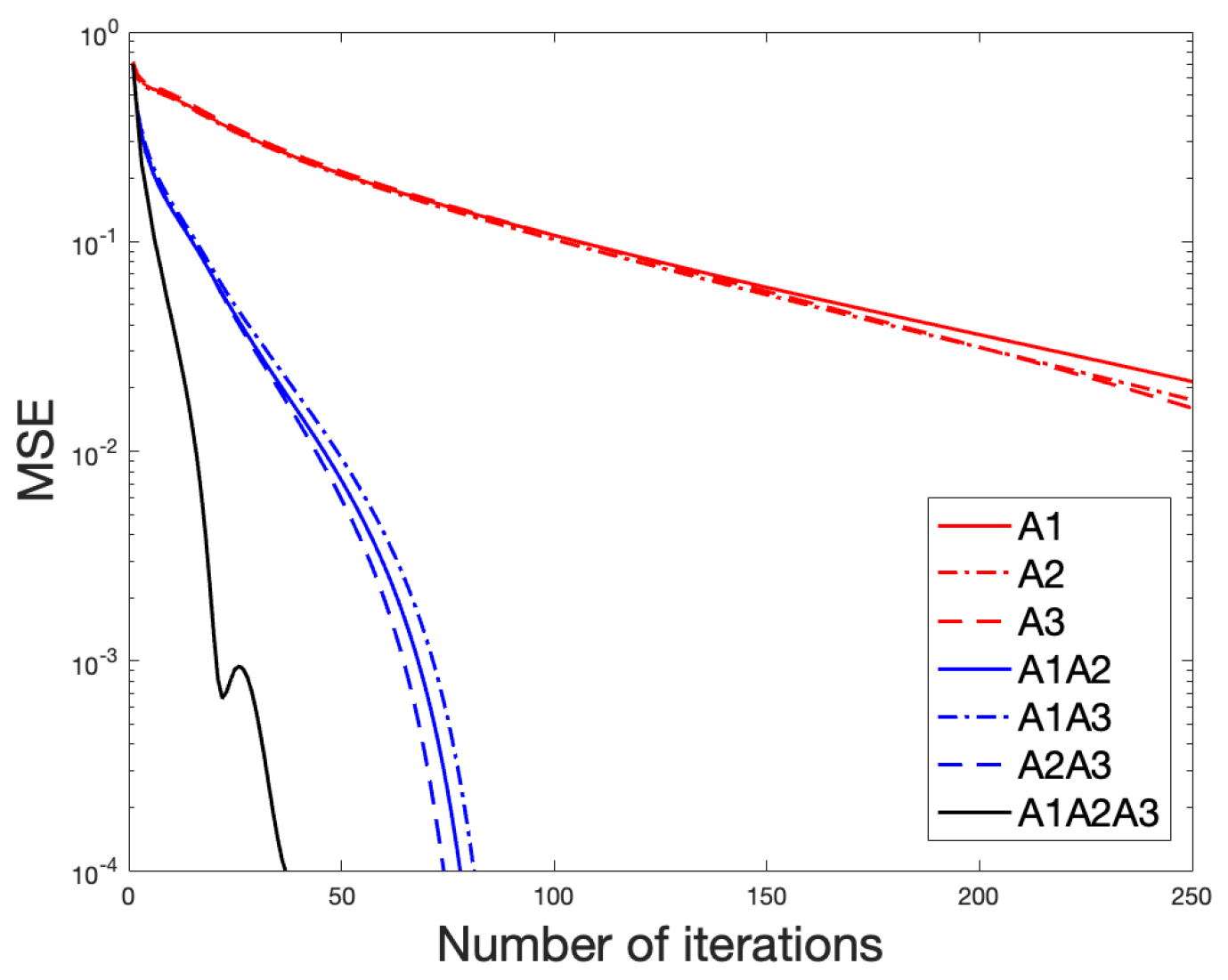
From
Figure 12, it is shown that the MSE value of Algorithm 1 with
decreased faster than that of Algorithm 1 with
, and that with
decreased faster than that of Algorithm 1 with
.
From
Figure 16 and
Figure 17, it is shown that Algorithm 1 with A1A2A3 converged faster than the PMHM, HTI, and VAM.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}