Abstract
The problem of constructing and justifying the discrete algorithms of the support operator method for numerical modeling of differential repeated rotational operations of vector analysis () in application to problems of magnetohydrodynamics is considered. Difference schemes of the support operator method on the unstructured meshes do not approximate equations in the local sense. Therefore, it is necessary to prove the convergence of these schemes to the exact solution, which is possible after analyzing the error structure of their approximation. For this analysis, a decomposition of the space of mesh vector functions into an orthogonal direct sum of subspaces of potential and vortex fields is introduced. Generalized centroid-tensor metric representations of repeated operations of tensor analysis (, , and ) are constructed. Representations have flux-circulation properties that are integrally consistent on spatial meshes of irregular structure. On smooth solutions of the model magnetostatic problem on a tetrahedral mesh with the first order of accuracy in the rms sense, the convergence of the constructed difference schemes is proved. The algorithms constructed in this work can be used to solve physical problems with discontinuous magnetic viscosity, dielectric permittivity, or thermal resistance of the medium.
Keywords:
self-gravitation; magnetohydrodynamic forces; support operator method; mathematical modeling MSC:
65N12; 76W05; 00A71; 65M06
1. Introduction
Support operator method (SOM) [1,2,3] in the construction of the difference schemes is used for a consistent approximation (in the sense of some integral identities) of the conjugate operations of vector analysis (, , , etc.) and their combinations that are necessary for the numerical modeling of mathematical physics problems. The SOM allows for constructing the difference schemes on irregular meshes for many equations of this class, including nonlinear ones, in particular, with the fulfillment of the principle of complete conservatism [4]. In particular, to solve the problems of magnetic gas dynamics and for the development of hydrodynamic instabilities, the computational schemes should ensure conservation laws with an error that must be time-limited in order to be able to consider asymptotic solutions for the problems. These requirements together led to the development of integrally consistent approximations of systems of partial differential equations that arise in continuum mechanics.
The construction of consistent approximations is subjected to the multiphysical nature of most practical problems in continuum mechanics and magnetic gas dynamics. This branch of the theory of mesh methods for solving initial-boundary value problems for systems of partial differential equations has a long history and has turned out to be very productive. A classic example is the construction of completely conservative difference schemes for gas dynamics [4]. Matching the approximations for the momentum balance equations, gas internal energy, and magnetic energy makes it possible to obtain their difference analogs. From these analogs, one can obtain the total energy balance equation which is free of “nonphysical” terms, i.e., those that do not have a physical nature, but occur only as a result of the chosen method of approximation. Thus, completely conservative schemes can be used in two basic equivalent forms, obtained one from another by algebraic transformations, either one that includes the total energy balance equation, or component-by-component balances of the kinetic, internal energy of the gas and magnetic energy. The latter form is important in such applications as, for example, calculations of high-velocity flows of gas mixtures, in cases where the characteristic energy relaxation time is longer than the characteristic momentum relaxation time, and the temperatures of individual components can differ markedly during the motion. Integral-consistent approximations are important in multiphysics calculations with a complicated description of energy exchange: gas dynamics of chemically reacting flows, radiation gas dynamics, magnetic gas dynamics, hydro-gasdynamic processes with energy flows to condensed matter, etc.
The SOM under consideration is actively studied and applied to practice problems. Let us take a look at some of them. Ref. [5] presents a comprehensive workflow for modeling integrally consistent single-phase flow and transport in a fractured porous medium using a discrete fracture matrix approach. In [6], the relationship between surface and underground flows was studied on completely unstructured meshes corresponding to complex soil structures. To accommodate the distorted grids that inevitably result from the explicit representation of complex soil structures, a mimetic finite-difference scheme structure (which is analogous to SOM) of spatial sampling is used to connect surface and underground flows. The Ref. [7] presents a mimetic finite-difference discretization of an arbitrary order for the diffusion equation with asymmetric positive definite tensor diffusion coefficient in a mixed formulation on general polygonal meshes. This scheme was tested on a non-stationary problem of modeling the Hall effect in resistive magnetohydrodynamics (MHD). In [8], the convergence of a new family of mimetic difference schemes for linear diffusion problems was studied. In contrast to the traditional approach, the diffusion coefficient enters both into the primary mimetic operator, i.e., into discrete divergence, and into the scalar product in the space of gradients. The diffusion coefficient is evaluated at different locations in the mesh, i.e., inside the mesh cells and on the mesh faces.
In Ref. [9], the explicit and implicit mimetic finite-difference schemes for the Landau–Lifshitz equation describing the dynamics of magnetization inside ferromagnetic materials were developed and analyzed. These schemes operate on common polyhedral meshes, which provide the flexibility to model magnetic devices of various shapes. The Ref. [10] presents a new family of mimetic difference schemes for solving elliptic partial differential equations in direct form on unstructured polyhedral meshes. Higher-order schemes are constructed using higher-order moments. The developed schemes are verified numerically on diffusion problems with constant and spatially variable tensor coefficients. In [11], the stability and convergence properties of the mimetic finite-difference method for diffusion-type problems on polyhedral meshes were studied. The optimal rates of convergence of scalar and vector variables in a mixed formulation of the problem are proved.
In Ref. [12], two new numerical methods for spatial discretization are presented, based on a mimetic finite-difference method for a degenerate partial differential equation in one dimension known as the Black–Scholes partial differential equation, which governs option pricing. To deal with partial differential equation degeneracy, a new customized finite-difference mimetic scheme is proposed along with the standard finite-difference mimetic method. Temporal discretization is performed according to the standard implicit scheme. In addition, rigorous proofs of convergence in the corresponding normed spaces are proposed. In [13], a systematic approach was developed to obtain mimetic finite-difference discretizations for the divergence and gradient operators, which provides the same order of accuracy at the boundary and internal mesh nodes. In Ref. [13], a second-order version of these operators is used to develop a new mimetic finite-difference method for the stationary diffusion equation. A theoretical and numerical analysis of this new method is presented, including an original and non-standard proof of the quadratic convergence rate of this new method.
In Ref. [14], a numerical analysis was performed to study the heat transfer in a three-dimensional magnetohydrodynamic flow of a magnetic nanofluid (ferrofluid) through a bidirectional exponentially stretching sheet of a hybrid nanofluid. The research results showed that, with an increase in the shape factor and generation/absorption parameters, the temperature above the surface increased. The obtained data prove that the skin friction coefficient corresponds to the magnetic parameters and the suction/injection parameters. Ref. [15] considers the magneto-hyperbolic-tangent liquid model taking into account magnetohydrodynamic processes. MHD has several applications in heat exchanger manufacturing, spacecraft strength, thermal enrichment, polymer technology, power generators, petroleum industry, and crude oil refining. In [15], hydromagnetic characteristics were studied under convective and stratified model constraints. Ref. [16] considers the magnetohydrodynamic flow and heat transfer of a non-Newtonian micropolar dusty liquid, suspended Cu-Al2O3 hybrid nanoparticles, past a stretching sheet in the presence of nonlinear thermal radiation, variable thermal conductivity, and various shapes of nanoparticles (bricks, cylinders, platelets, and blades). H2O is used as base fluid. The effect of various parameters on the velocity and temperature profiles is analyzed for a given heat flux and a given surface temperature. An increase in the Hartmann number led to a decrease in speed due to the Lorentz force. The temperature also increased as a result of the increase in the Hartmann number due to the Joule heating effect.
In Ref. [17], the entropy generation of nanofluids between two stretching rotating disks under the action of magnetohydrodynamic and thermal radiation is considered. In [17], ethylene glycol (CH2OH)2 is used as the base liquid, and carbon nanotubes, which include both single-walled carbon nanotubes and multi-walled nanotubes, are used as nanoparticles. The effect of the radiation parameter, magnetic field, porosity, suction/injection, and Brinkmann number on the skin friction coefficient and Nusselt number are studied. In [18], a magnetohydrodynamic flow is studied in the presence of microorganisms and nanoparticles on the surface. The desired results are the number of motile microorganisms, the Nusselt number, the coefficient of friction of the skin, and the Sherwood number. The influence of Brownian motion, thermal radiation, Schmidt number, thermophoresis, Peclet number, magnetic field, and bioconvection Schmidt number on the desired results have been studied. In [19], a three-dimensional estimate of the convective heat transfer properties of a magnetohydrodynamic flow of a nanofluid consisting of mobile oxytactic microorganisms and nanoparticles passing through a rotating cone was obtained. The influence of various factors on the distribution of velocity, temperature, and concentration is studied, taking into account the addition of a magnetic field, thermal radiation, and viscous dissipation to the calculations. Changing the magnetic parameter from 0 to 1 led to a decrease in the temperature distribution by approximately 3.11%.
The expansion of the practice of using grids of irregular structure is due to the need to solve applied problems of mathematical physics in geometrically nontrivial areas. One such very effective method for constructing consistent approximations is the method of support or integrally consistent operators. The idea of constructing integrally consistent approximations of differential operators was realized in [20,21], where approximations on rectangular grids were obtained. Generalizations of this method to the case of irregular grids appeared as a result of the analysis of the development of projection-grid and variational-difference schemes for equations of elliptic type [22], as well as variational-difference schemes for equations of gas and magnetic gas dynamics [23]. In the works of this direction, in particular, the possibilities of constructing difference schemes without assumptions about the structure of the difference grid were studied [24,25,26]. It turned out that the natural basis for the corresponding difference constructions approximating differential operators is the integral identities of vector and tensor analysis [27]. Since these identities connect vector analysis operators in an invariant form, for their use in constructing grid approximations, the natural form of representation of the original differential equations (and the corresponding boundary value problems) is invariantly defined operators. In this case, it turns out to be possible to construct an approximation of any one of the operators, for example, the gradient. Some integral identities link operators of different types, i.e., acting on scalar and vector functions, which allows, for example, to obtain an approximation of the divergence of a vector field as a generated operator [28,29], which, together with the gradient difference operator, satisfies the difference analogue of the corresponding integral identity.
The problems of research and justification for these schemes are less developed. In this work, on the classical solutions of the model magnetostatic problem on tetrahedral irregular meshes, the convergence of SOM difference schemes for repeated rotational operations of vector analysis () with zero eigenvalues of the spectral problem is proved. All equations are linear and, moreover, with constant coefficients. This choice is explained by the desire to highlight the problems associated exclusively with the irregularity of the mesh and to show the commonality of approaches to their solution. Convergence is proved at the geometric level, i.e., depending on the degree of coordination of the geometry of the mesh and its metric properties with template functionals that determine the specific form of the difference scheme. In this case, the sufficient smoothness of the solution of the original differential problem is assumed.
The considered difference schemes generally do not approximate the equations in the local sense; therefore, the proof of convergence is possible after analysis of the structure of the approximation error. An investigation of this problem leads to a splitting of the space of vector mesh functions into an orthogonal direct sum of the subspaces of potential and vortex ones. As applied to the SOM difference scheme for the magnetostatic problem, the difference rotor of the circulations calculation error is zero. Therefore, this error is the difference gradient of some mesh function . The norm of circulation error is determined by the energy of the metric mesh operator G [30]. The action of the metric operator G on the area of the faces of the cells , in turn, is consistent with the sizes of the cells (the location of the centers of gravity of the cells, faces, and edges). We introduce a decomposition of the space of mesh vector functions into the orthogonal direct sum of the subspaces of potential and vortex fields, so that the error in computing the circulations is a potential function.
Thus, in the present work, on sufficiently smooth solutions of the differential problem on tetrahedral meshes with the first order of accuracy in the mean-square sense, the convergence of SOM difference schemes for repeated rotational operations () with zero eigenvalues of the spectral problem is proved. There are no restrictions on the tetrahedral mesh, except for its non-degeneracy.
2. Covariant Representation of a Mesh Dot Product on the Mesh
Cells are made up of faces and nodes . The bases are formed by the unit normal of the faces forming the given basis. Its central node corresponds to such a basis . In the bases , their volumes are selected with the normalization condition in the cell . Spatial meshes with the above-described structural elements were introduced in [1,30] and are shown in Figure 1a. The strengths of the magnetic field are componentwise related to the normals of which the bases are composed.
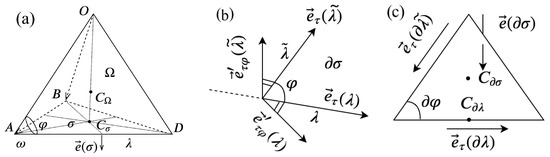
Figure 1.
Mesh and mesh bases: (a) tetrahedron; (b) boundary approximation of the Poynting flux; (c) magnetic circulation on the boundary contour , , . Beyond the face , the cell ∂ is located.
Using the facet weight volume , we introduce the mesh dot product approximating the integral in the domain O in its covariant representation
Here, by the definition,
Thus, the metric operator G, including , is actually introduced according to the formula
We have constructed a positive definite self-adjoint operator on the mesh. It is given by a family of Gram matrices in local bases . Here, are the vectors of the mutual basis with respect to the initial one formed by the vectors . This operator G connects the covariant and contravariant representations of the magnetic field strength. For triangular 2d cells according to [1], the base volume is defined as . Here, and are sides of the triangle forming the basis .
Likewise in a quadrangular cell, it is . For tetrahedral 3D cells , it is selected as , .
What has been described in this section is generalized to non-unit normals to cell faces .
Mesh divergence is given as:
Here, is the area of the face divided by the length of the ort , i.e., the specific area. If the normal to the cell is external, then . For the inner normal, this sign function is equal to minus one.
The cell scalar product is defined as
Using (1) from the difference analogue of the integral identity [3]:
in the area O closed by the surface , we obtain the mesh operator
On the boundary faces in this identity, is the specific area. for the outer surface normal and if otherwise. In addition, the function is defined on the boundary faces . The quantities and F are arbitrary mesh functions; therefore, on the faces , we obtain
where
The last term in the expression for on the face is added at the boundary of the region (i.e., ).
3. Difference Evolution Model of the Magnetic Energy of the System
3.1. Metric Support-Operator Meshes for MHD Processes
is the length of the oriented edge divided by the length of the ort vector . This is the specific length of the edge. The oriented area of the boundary face is divided into the sum of the areas of the surface bases inside this face . The boundary edge has a superficial near edge area and a transverse length . The mesh is formed by local bases of edges with oriented vectors . Electric field strengths are componentwise related to the edges of a given mesh. To define the metric operator on , we consider the dot product: with near-edge volume . The continual scalar product in the entire region O is approximated by the representation
Thus, the metric operator , including , is actually introduced by the formula
In the sense of the scalar product , we have constructed a positive definite self-adjoint operator , . It is given by a family of Gram matrices in local mutual basis . Here, are the vectors of the mutual basis with respect to the initial one formed by the vectors . The index determines the object relation to the mesh . This operator connects the covariant and contravariant representations of the electric field intensity. Approximating Stokes’ theorem on the cell face , we obtain a mesh rotor (see Figure 2a) acting on an electric field :
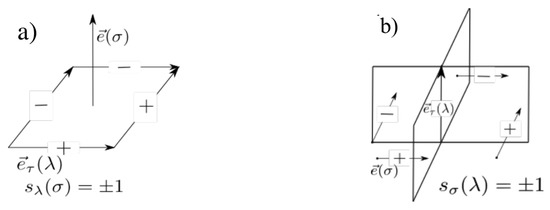
Figure 2.
Circular matching of oriented normals to faces on the left and tangents along mesh edges on the right. The sign function (a) takes values according to whether the orientation of the edge coincides with the direction of rotation about the normal . The sign function (b) is defined similarly, but the contour is made up of oriented face normals , and the rotation is around the tangent along the edges .
Here, is the area of the face divided by the length of the ort . From Figure 2, sign functions , are set (including ). The boundary sign function is equal to plus one if in the surface basis the rotation from the unit vector to the complementary to it in determines the outward normal to the region. Otherwise, .
On the edges of the boundary of the region O, as well as an electric field , we consider a magnetic field with components tangential to the surface of the region. Using (3) from the difference analog of the integral identity [3]:
in the area O, closed by the surface , we obtain the mesh operator
The operator acts on magnetic field .
From the approximation in the surface basis of the mixed product in (4), the magnetic circulation transverse to the edge is determined on the surface of the region (see Figure 1b)
is Gram matrix composed of orts and in a surface basis . Its determinant is:
For the angle between the vectors of the surface basis , the identity is fulfilled
Hence, the integral conjugate to the operator , the operator of interest to us, will be obtained from (5):
If the magnetic circulation is used to close the contour around the surface edge in the operator, then the first boundary value problem (Dirichlet) is considered to be posed on this edge . The edge , in other words, we will understand as , and we will put on it the second boundary value problem (Neumann), if the electric circulation along the surface edge is defined. This edge closes the contours of the faces in (3) for the operator . In this case, the operation , including turns out to be self-adjoint and non-negative according to (5) in the sense of the scalar product . For the operation , we similarly have , in the sense of the scalar product . Due to the metric properties of the meshes and , as well as mesh-oriented flow-circulation relationships (see Figure 2), the properties of operations in the mesh cells are fulfilled.
3.2. Metric Properties of Rotary Operations on Tetrahedral Meshes
On the tetrahedral mesh, we also set the form of a closed conjugate magnetic contour () with an axis around the edge . For the surface edges , the contribution to the spatial closure of the contour will be made taking into account the approximation of the Poynting vector on the faces .
Consider the contour of magnetic circulation around the edge , formed by adjacent tetrahedra (see Figure 1a). We introduce the centroid points of the tetrahedron (for , and ):
Here, are vectors defining the spatial arrangement of nodes forming cells , faces and edges . Deferring these vectors from the node O (see Figure 1a), we obtain
We transform the expression from (8)
The vector of the magnetic field intensity in the basis is . The height in the tetrahedron drawn to the face is denoted as . In addition, on the -basis, is the mutual (contravariant) vector corresponding to the unit normal to the face . The representation takes place (see Figure 1a)
This identity constructs the circulation of the magnetic field intensity between the gravity centers of the cell and one of its faces as
Because of this, (8) can be represented in the form
The Pointing electromagnetic energy flux approximated on the surface of the region on the right-hand side of (4) is consistent with the discrete representation of the boundary magnetic circulation (5), (6) between the gravity centers of the surface faces and the midpoints of their edges (see Figure 1c). The corresponding contours have a geometric representation (see (6))
The intersection point of the medians in the triangle is connected to vectors by the midpoint of one of its edges . are surface bases in the triangle . Their area can be represented as through the area of the triangle containing this basis . is true for the outer surface normal and , if otherwise.
By virtue of the above geometric reasoning, we see that the discrete magnetic circulation on can be represented as
Finally,
Equality (9) means that the rotor of the magnetic field (see (8)) can be represented by a spatially closed centroid contour circulation around the axis of the edge . A spatial contour connects the gravity centers of cells and faces around the edge . On the boundary face , the intersection point of its medians is connected to the middle of the axial edge , on which is defined. From the spatial closeness of the circulation representation (9) on the mesh, it follows that
4. Convergence of Difference Schemes of the Support Operator Method for Rotational Operations of Vector Analysis on Tetrahedral Meshes
4.1. Formulation of the Problem
On sufficiently smooth solutions, the approximation by difference schemes of support operator method [31]
with solenoidal magnetic field () is considered, for which with necessity [32] a certain field exists, incl. (11) holding. It is also assumed that a certain distribution of current densities , for which (10) holds, and boundary tangential components of magnetic field are explicitly given. Obviously, “electric” field is determined to be accurate for a constant and homogeneous spectral problem (with and ) having zero eigenvalue.
For the solenoidality of the function (i.e., ), the existence of the function , incl. is necessary and sufficient [32]. For Equations (10) and (11), we consider the boundary-value problem with the tangential components of the magnetic field defined on the boundary of the region O
In addition, obviously, for any closed loop bounding the surface the following will be satisfied:
The difference scheme of the support operator method will have the form
Hereinafter, when investigating the convergence of this difference scheme (13) and (14), the specific lengths of the edges and the areas of faces are considered to be unit (see (3), (1)). We represent the electric flow through the area
penetrated by the vector in the form
4.2. Solvability of the Difference Problem
We study the solvability conditions for problems (13), (14), and (20). Introduce internal rotation as
Obviously, by virtue of (5),
Hence, we see that the operator of homogeneous system is self-adjoint and non-negative. Thus, the solution of a conjugate homogeneous system has the property (for example, ). The orthogonality condition on the right-hand side in (13) according to (8) has the form
or, taking into account (16)–(20), we have
Thus, since , for any in the solenoidal representation in accordance with (17), the condition of orthogonality of the solution of the homogeneous conjugate system of Equation (21) and the right-hand side (13) under condition (20) is fulfilled. This is the condition for the solvability of problem (13), (14), (20) by the Fredholm matrix theorem [33].
4.3. Accuracy of the Difference Scheme
Integrating (10) over the area around the edge , we find
where
and, subtracting (13) from this equation, we obtain
Conditions (24) mean that, in the cell , there is a grid function such that
and constant on the boundary faces , i.e., . This constant will be considered equal to zero, . We obtain the equation that the function satisfies. We have
Summing up this equality over the cell faces , taking into account (see (14)), we obtain
by (2); taking into account , we have
From identity (2) for , for any difference solenoidal function (i.e., ), by virtue of its orthogonality to , we have
Here, as applied (3), which determines , we have
and the integrals of the exact solution (see (11)) are taken along the edges oriented by . The norms of grid vectors on the faces here are understood , as well as , .
The boundaries of the spectrum of a self-adjoint, positive definite operator consisting of Gram matrices in mutual bases (see Section 2), provided that tetrahedral mesh is non-degenerate, can be estimated as
The corresponding estimate for the inverse operator has the form
Here, and are bounded quantities that do not tend to zero and do not depend on the grid step .
A mesh is considered non-degenerate if:
1. There is a parameter characterizing the partition detail of computational domain O and having the meaning of linear dimensions of grid elements.
2. The unreasonable sizes of grid elements are uniformly evaluated for the entire grid family:
3. The ratio of nonspecific areas of faces , as well as the lengths of edges included in one basis , uniformly across h, does not tend to zero and is bounded above by the number .
4. Among the dihedral and flat corners of the cells , there are no very sharp and very obtuse ones, i.e., they are all uniformly across h enclosed in the range from to with a non-zero angle .
Next, we obtain
On the face according to (22), we have
Here, is the magnetic field for solving problems (10), (11), and (20) at the gravity center of face (see Figure 1a).
The last integral is taken over the oriented area of the face from the operator template on the face . is a specific area of the face . Obviously on the face ,
Hence,
We see
i.e.,
because in total, the summation contains terms.
5. Evolution of Electromagnetic Energy
In the numerical modeling of astrophysical problems with consideration of the magnetohydrodynamic phenomena, the processes of matter supercompression may occur (the density changes by several orders of magnitude). Thus, it is important to take into account the corresponding energy transformations of magnetohydrodynamic, as well as kinetic, and internal energy during the evolution of a star at a discrete level. This problem is solved by constructing a completely conservative difference transformation [4] of the magnetic energy of the medium, which considers these magnetohydrodynamic processes.
Accounting for magnetohydrodynamic forces in the construction of completely conservative difference schemes is associated with significant difficulties [4]. Using the method of support operators [1], an integrally consistent difference scheme is proposed in this work, which makes it possible to match the change in the kinetic, internal, and magnetohydrodynamic energies [30]. As a basic operator, this method uses the result of varying the magnetohydrodynamic energy of the system, which is a discrete convolution of two tensors. The first tensor is the Maxwell tensor in the difference medium under study, which is fully responsible for all magnetohydrodynamic processes unfolding against the background of the hydrodynamic motion of matter. The second tensor is the symmetrized strain rate tensor, which represents kinematic motions in this system. The operator conjugate to the convolution of these tensors, due to the technology of the support operator method, automatically gives a magnetic force (the divergence of the Maxwell tensor) acting on the nodal balance domains of the difference medium.
In conclusion, let us consider the issue of applying the developed tools for discrete integrally consistent modeling of rotational operations of vector analysis in application to magnetohydrodynamic problems.
Let O be a flux region with a surface ( is the externally oriented area) and a mass M concentrated in it. is the constant mass of Lagrangian particles of the medium occupying the volume . In the magnetohydrodynamic approximation, the integral balance of magnetic energy in a medium has the form [31]:
The Maxwell tensor is given by the representation where is the metric tensor, is the magnetic field strength divided by the speed of light c, and is the electric field strength in the coordinate system associated with the moving particle. is the Joule heating per unit volume of the medium. is the magnetic dissipative function. The kinematic tensor is given by the representation , where is the velocity of the medium particles. is the Poynting vector, which determines the external flux of electromagnetic energy.
The corresponding Maxwell equations for the electromagnetic field in the circulation circuits and H limiting the surface are written as [31]:
Here, is the substantial derivative. is the positive definite tensor of magnetic viscosity in the medium (). For the current density in a medium with conductivity , Ohm’s law is also valid in the form: , . On a closed surface , the relation follows from the condition of the absence of magnetic charges.
Passing to discretization, we represent the evolution of the magnetic field on the faces of the mesh ().() (the first Maxwell equation from (27)) in the form
From (28), we see that, in the absence of magnetic charges in the mesh cell at the initial moment, the condition of their absence is always satisfied in this cell. The normal components of the magnetic field are assumed to be continuous on the mesh faces.
Furthermore, on the mesh ().(), analogous with the metric operator (see Section 3.1), for a self-adjoint, positive-definite magnetic conductivity tensor , which approximates the reciprocal magnetic viscosity in the medium in the mesh bases , we introduce the metric conductivity operator and the second Maxwell equation from (27) for the electric field flux can be represented as
Here, the Gram matrices of the conductivity of the medium are defined as
Obviously, the operator is also self-adjoint and positive definite on the mesh ().(). The tangential components of the electric field are considered continuous on the mesh ().().
Here, the Joule heating of the entire volume of the medium
is defined as its sum in local bases
with electric field strengths in these bases . It is also obvious that, for the flux of the Poynting vector through the surface , bounding the required area O, the representation follows
Let us now transform the expression for changing the magnetic energy (see (26)) on the mesh with the metric operator G
Finally, we have the law of conservation of magnetic energy:
Since , we conclude that the quantities and approximate on the mesh the magnetically consistent contravariant tensor and contravariant symmetrized strain velocity tensor , respectively.
6. Conclusions
The work is devoted to the construction and justification of difference schemes of the support operator method in relation to the modeling of repeated rotational operations of vector analysis () for problems of magnetohydrodynamics. Discrete algorithms of the method of support operators on spatial grids of irregular structure do not approximate equations in the local sense. Because of this, it becomes necessary to prove the convergence of these schemes to the exact solution. The solution to this problem is possible after analyzing the structure of the approximation error of the schemes under consideration. In this work, the convergence of difference schemes of the support operator method is proved for repeated rotational operations of vector analysis based on classical solutions of a model magnetostatic problem. Convergence is proved in the root-mean-square sense with the first order of accuracy on irregular tetrahedral meshes. The case of zero eigenvalues of the spectral problem is considered. The proof is carried out in mesh-dependent norms related to the energy of the metric operator of the mesh, which is not subject to any restrictions, except for its non-degeneracy. For the research carried out, generalized centroid-tensor metric representations of repeated operations of tensor analysis (, , and ) have been developed. Metric representations have flux-circulation properties and are integrally consistent on meshes of irregular structure. The developed mesh centroid-tensor metric formalism is also used in this work to analyze the time evolution of electromagnetic energy on a mesh in the magnetohydrodynamic approximation. Generalized centroid-tensor metric transformations can also be used in other problems in the theory of the support operator method. In addition, an algorithm for the evolution of electromagnetic energy, integrally consistent with the kinetic and internal energies of the medium, has been developed in the work. As a result, a completely conservative difference transformation of the magnetic energy of the medium was constructed, which takes into account these magnetohydrodynamic processes. Accounting for magnetohydrodynamic forces in the construction of completely conservative difference schemes is associated with significant difficulties. Integral matching of kinetic and magnetohydrodynamic energies due to the methodology of support operators automatically gives the magnetic force acting on the nodal balance domains of the difference medium.
Author Contributions
Conceptualization, Y.P.; methodology, P.R.; formal analysis, V.P.; investigation, Y.P., V.P. and P.R.; writing—original draft preparation, Y.P. and P.R.; writing—review and editing, Y.P. and V.P.; supervision, Y.P. and V.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was carried out within the framework of the state assignment of KIAM RAS.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Samarskii, A.A.; Koldoba, A.V.; Poveshchenko, Y.A.; Tishkin, V.F.; Favorskii, A.P. Different Schemes on the Non-Regulated Grids; CJSC “Criterion”: Minsk, Belarus, 1996. [Google Scholar]
- Shashkov, M. Conservative Finite-Difference Methods on General Grids; CRC Press: Boca Raton, FL, USA, 1996. [Google Scholar]
- Lipnikov, K.; Manzini, G.; Shashkov, M. Mimetic finite difference method. J. Comput. Phys. 2014, 257, 1163–1227. [Google Scholar] [CrossRef]
- Samarskii, A.A.; Popov, Y.P. Difference Methods for Solving Problems of Gas Dynamics; Nauka: Moscow, Russia, 1992. [Google Scholar]
- Hyman, J.D.; Sweeney, M.R.; Gable, C.W.; Svyatsky, D.; Lipnikov, K.; Moulton, J.D. Flow and transport in three-dimensional discrete fracture matrix models using mimetic finite difference on a conforming multi-dimensional mesh. J. Comput. Phys. 2022, 466, 111396. [Google Scholar] [CrossRef]
- Coon, E.T.; Moulton, J.D.; Kikinzon, E.; Berndt, M.; Manzini, G.; Garimella, R.; Lipnikov, K.; Painter, S.L. Coupling surface flow and subsurface flow in complex soil structures using mimetic finite differences. Adv. Water Resour. 2020, 144, 103701. [Google Scholar] [CrossRef]
- Gyrya, V.; Lipnikov, K. The arbitrary order mimetic finite difference method for a diffusion equation with a non-symmetric diffusion tensor. J. Comput. Phys. 2017, 348, 549–566. [Google Scholar] [CrossRef]
- Manzini, G.; Lipnikov, K.; Moulton, J.D.; Shashkov, M. Convergence analysis of the mimetic finite difference method for elliptic problems with staggered discretizations of diffusion coefficients. SIAM J. Numer. Anal. 2017, 55, 2956–2981. [Google Scholar] [CrossRef]
- Kim, E.; Lipnikov, K. The mimetic finite difference method for the Landau–Lifshitz equation. J. Comput. Phys. 2017, 328, 109–130. [Google Scholar] [CrossRef]
- Lipnikov, K.; Manzini, G. A high-order mimetic method on unstructured polyhedral meshes for the diffusion equation. J. Comput. Phys. 2014, 272, 360–385. [Google Scholar] [CrossRef]
- Brezzi, F.; Lipnikov, K.; Shashkov, M. Convergence of the mimetic finite difference method for diffusion problems on polyhedral meshes. SIAM J. Numer. Anal. 2005, 43, 1872–1896. [Google Scholar] [CrossRef]
- Attipoe, D.S.; Tambue, A. Convergence of the mimetic finite difference and fitted mimetic finite difference method for options pricing. Appl. Math. Comput. 2021, 401, 126060. [Google Scholar] [CrossRef]
- Guevara-Jordan, J.M.; Rojas, S.; Freites-Villegas, M.; Castillo, J.E. Convergence of a mimetic finite difference method for static diffusion equation. Adv. Differ. Equ. 2007, 2007, 012303. [Google Scholar] [CrossRef][Green Version]
- Zangooee, M.R.; Hosseinzadeh, K.; Ganji, D.D. Investigation of three-dimensional hybrid nanofluid flow affected by nonuniform MHD over exponential stretching/shrinking plate. Nonlinear Eng. 2022, 11, 143–155. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Aslam, A.; Waqas, M.; Javed, M.A.; Hosseinzadeh, K. A nonlinear mathematical analysis for magneto-hyperbolic-tangent liquid featuring simultaneous aspects of magnetic field, heat source and thermal stratification. Appl. Nanosci. 2020, 10, 4513–4518. [Google Scholar] [CrossRef]
- Ghadikolaei, S.S.; Hosseinzadeh, K.; Hatami, M.; Ganji, D.D. MHD boundary layer analysis for micropolar dusty fluid containing hybrid nanoparticles (Cu’Al2O3) over a porous medium. J. Mol. Liq. 2018, 268, 813–823. [Google Scholar] [CrossRef]
- Hosseinzadeh, K.; Asadi, A.; Mogharrebi, A.R.; Khalesi, J.; Mousavisani, S.; Ganji, D.D. Entropy generation analysis of (CH2OH)2 containing CNTs nanofluid flow under effect of MHD and thermal radiation. Case Stud. Therm. Eng. 2019, 14, 100482. [Google Scholar] [CrossRef]
- Hosseinzadeh, K.; Salehi, S.; Mardani, M.R.; Mahmoudi, F.Y.; Waqas, M.; Ganji, D.D. Investigation of nano-bioconvective fluid motile microorganism and nanoparticle flow by considering MHD and thermal radiation. Inf. Med. Unlocked 2020, 21, 100462. [Google Scholar] [CrossRef]
- Mogharrebi, A.R.; Ganji, A.R.D.; Hosseinzadeh, K.; Roghani, S.; Asadi, A.; Fazlollahtabar, A. Investigation of magnetohydrodynamic nanofluid flow contain motile oxytactic microorganisms over rotating cone. Int. J. Numer. Method Heat Fluid Flow 2021, 31, 3394–3412. [Google Scholar] [CrossRef]
- Lebedev, V.I. Difference analogues of orthogonal decompositions of basic differential operators and some boundary value problems of mathematical physics, Part I. USSR Comput. Math. Math. Phys. 1964, 4, 69–92. [Google Scholar] [CrossRef]
- Lebedev, V.I. Difference analogues of orthogonal decompositions of basic differential operators and some boundary value problems of mathematical physics, Part II. USSR Comput. Math. Math. Phys. 1964, 4, 36–50. [Google Scholar] [CrossRef]
- Samarskii, A.A.; Lazarov, R.L.; Makarov, V.L. Difference Schemes for Differential Equations with Generalized Solutions; Nauka: Moscow, Russia, 1987. [Google Scholar]
- Goloviznin, V.M.; Samarskii, A.A.; Favorskii, A.P. A variational approach to constructing finite difference mathematical models in hydrodynamics. Proc. USSR Acad. Sci. 1977, 235, 1285–1288. [Google Scholar]
- Mikhailova, N.V.; Tishkin, V.F.; Tyurina, N.N.; Favorskii, A.P.; Shashkov, M.Y. Numerical modelling of two-dimensional gas-dynamic flows on a variable-structure mesh. Comput. Math. Math. Phys. 1986, 26, 74–84. [Google Scholar] [CrossRef]
- Solov’ev, A.V.; Solov’eva, E.V.; Tishkin, V.F.; Favorskii, A.P.; Shashkov, M.Y. Investigation of the approximation of difference operators on a grid of dirichlet cells. Differ. Equ. 1986, 22, 1227–1237. [Google Scholar]
- Solov’ev, A.V.; Solov’eva, E.V.; Tishkin, V.F.; Favorskii, A.P.; Shashkov, M.Y. Difference schemes of the method of “Dirichlet particles”, which preserve the one-dimensionality of gas dynamic flows in Cartesian, cylindrical and spherical coordinates. Differ. Equ. 1987, 23, 2133–2147. [Google Scholar]
- Krasnov, M.L.; Kiselev, A.I.; Makarenko, G.I. Vector Analysis; Mir Publishers: Moscow, Russia, 1983. [Google Scholar]
- Samarskii, A.A.; Tishkin, V.F.; Favorskii, A.P.; Shashkov, M.Y. Operator difference scheme. Differ. Equ. 1981, 17, 1317–1327. [Google Scholar]
- Koldoba, A.V.; Poveshchenko, Y.A.; Gasilova, I.V.; Dorofeeva, E.Y. Numerical schemes of the support operators method for elasticity theory equations. Math. Model. 2012, 24, 86–96. [Google Scholar]
- Poveshchenko, Y.A.; Podryga, V.O.; Sharova, Y.S. Integral-consistent methods for calculating self-gravitating and magnetohydrodynamic phenomena. KIAM Prepr. 2018, 160, 1–21. [Google Scholar] [CrossRef]
- Kulikovskii, A.G.; Lyubimov, G.A. Magnetic Hydrodynamics, 3rd ed.; Logos: Moscow, Russia, 2011. [Google Scholar]
- Korn, G.; Korn, T. Handbook of Mathematics; Nauka: Moscow, Russia, 1973. [Google Scholar]
- Voevodin, V.V.; Kuznetsov, Y.A. Matrices and Computing; Nauka: Moscow, Russia, 1984. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).