Abstract
In this paper, we are concerned with approach solutions for Sturm–Liouville problems (SLP) using variational problem (VP) formulation of regular SLP. The minimization problem (MP) is also set forth, and the connection between the solution of each formulation is then proved. Variational estimations (the variational equation associated through the Euler–Lagrange variational principle and Nehari’s method, shooting method and bisection method) and iterative variational methods (He’s method and HPM) for regular RSL are unitary presented in final part of the paper, which ends with applications.
MSC:
34A12; 34A45
1. Introduction
Nonlinearities are different from linear type by a function, an operator or a system that is nonlinear or is the case in which only some characteristics of it are known. The existence of the solution and the dependence of conditions for solving some classes of differential equations described by an operator is specified by the general framework of the Sturm–Liouville problem, with parametric conditions at the limit. The general framework of the Sturm–Liouville problem with parametric conditions at the limit is specified in the first part of the paper. The existence of the solution and the dependence of conditions is specified through the connection between the differential operator and Green’s function. Based on the properties of Green’s function, the operator used to analyze the behavior of the solution of the parameters given by the boundary conditions is specified. Variational problems derived from the initial RSLP are outlined with different type conditions in order to estimate the solution.
Let be the operator as part of the regular Sturm–Liouville problem (RSL). The Sturm–Liouville (SL) problem expressed by the differential equation and the boundary conditions
could be written as
with in case and with integrant factor , in case (see [1,2]).
The Sturm–Liouville equation is regular in the interval if the functions verify the condition and or and the operator is self-adjoint with real eigenvalues and orthogonal eigenfunctions in space according to the inner product
and for a given , there exist two linearly independent solutions of a equation in the I interval, .
We denote as the domain of L that is defined by
The adjoint operator, , associated to the operator L verifies and L is self-adjoint if . Additionally, the operator L is symmetric if . For the operator defined for SL problems, one obtains
and the condition holds if verified in and the Lagrange identity is expressed by
Remark 1.
L for SL problems is the self-adjoint operator if
For example, forand periodic conditions
or antiperiodic conditions
the operator L is self-adjoint.
The RSL eigenvalue problem is to find such that for with , the eigenvalue associated with v is the eigenfunction. For RSL problems, all the eigenvalues are real and positive [3,4,5], and there exists an infinite number of eigenvalues. The sequence of the eigenvalues is considered such that with . For each eigenvalue , the corresponding eigenfunction is unique up to a constant factor and has exactly zeros in interval . The set is complete in the space, and the solution of RSL is represented by a generalized Fourier series of the eigenfunction
2. General Framework of SLPs
In this section, we will mention certain conditions that the functions defining the operator L fulfill for different SL or RSL problems.
A second method to find the solution of a RSL problem, different from the generalized Fourier series development, is described using the Green function and two linear independent solutions. The section ends with the analysis of the Fourier equation with different types of boundary conditions.
Remark 2.
For Sturm–Liouville problems, we consider two types of assumptions that are usually used (see [4])
- General assumptions:
- (1)
- , differentiable in , with , .For , we suppose ,
- (2)
- .
- RSL assumptions
- (1)
- and or on ;
- (2)
- ;
- (3)
- ;
- (4)
- continuously differentiable on.
Known equations, such as Fourier, Graetz–Nusslet, Collatz and Airy equations, for which RSL assumptions are verified, are given in Table 1, and the first eigenvalues and eigenfunctions are depicted in Figure 1 and Figure 2.

Table 1.
Examples of regular Sturm–Liouville problems.
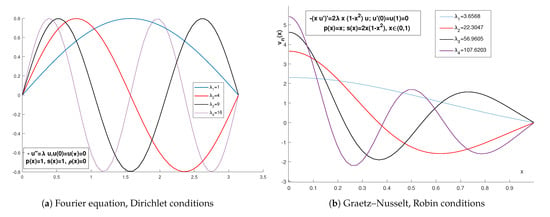
Figure 1.
(a) Fourier equation; (b) Graetz–Nusselt equation.
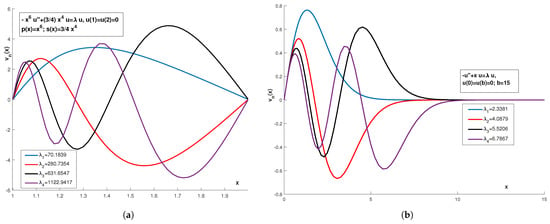
Figure 2.
(a) Collatz problem; (b) Airy problem.
Some other known equations, such as the Legendre differential equation, Chebysev’s differential equation or Bessel equation, must be transformed into the Sturm–Liouville form that we considered in (3). These forms are specified in Table 2. Other SL equations for which general assumptions are fulfilled are exemplified in Table 3.
Table 2.
Examples of differential equations and their SL form.
Table 3.
Examples of Sturm–Liouville problems.
For an example of a singular SL, a discontinuity on the middle of the interval is considered , , with and , .
The problem to solve is and with , transmission conditions.
The asymptotic behavior of the eigenvalues leads to as .
2.1. Resolvent Operator and Green Function
This RSL problem is solved using a Green function solution for the resolvent operator of the form
where , are non-trivial classical solutions of which satisfy
A simple normalization that eliminates some complexity can be specified by requiring
Then, the Wronskian of these solutions is a function that depends only on :
Therefore, or . The Wronskian vanishes if is a dependent set of functions of x, which is precisely when both functions satisfy as well as the specified conditions at and , meaning is an eigenvalue of L (see [6]).
For the RSL case, the equation has two linear independent solutions, and such that the Green function ,
has the properties
- (i)
- , and satisfies the boundary conditions according to each variable;
- (ii)
- , with over and ;
- (iii)
- , is discontinuous on M.
Now let T be the operator defined on . Using the properties of the Green function G and the continuity of u, one obtains that Tu and is the solution of the equation . The function Tu satisfies the same boundary conditions as , then , and T is the inverse operator of L. The problem of eigenvalues and eigenfunctions becomes with . For results for the construction of the operator T for fractional SLPs, see [7,8].
Remark 3
(Rayleigh quotient). The eigenvalues of the operator L are lower bounded by a real constant. The smallest eigenvalue of the SL eigenvalue problem satisfies
and the minimum is achieved if is the eigenfunction corresponding to .
2.2. Sturm–Liouville Fourier Problems
Consider the operator and nonhomogeneous equation with functions smooth, positive, and also (i) or or both or (ii) the interval I is infinite. In this section, we study the Fourier problem
with different type of boundary conditions. For example, in the case of Dirichlet conditions , the operator in space is self-adjoint.
In Example 1, we study the case for . Additionally, for the case , general solutions of the homogeneous equation are , and for boundary conditions , the RSL solution is .
Table 4.
Examples of Sturm–Liouville problems with , case 1: .
Table 5.
Examples of Sturm–Liouville problems with , case 2: .
Example 1.
Let us consider the RSL equation, with general solutionfor the homogeneous equation and associated Green’s function
Using the superposition principle, the solution of the problem defined for,is,and
Changing the boundary conditions in the previous problem, we now consider
Solving the initial value problemone finds the solutionand boundary condition leads to with
Example 2.
Forand, general solutions of the equation arewiththe eigenvalues and forthe eigenfunctions are. The general solution is a Fourier series:
- Case 1.1
According to Table 4, for Cases 1.1, we considerandisand the eigenfunctions. The eigenvalues corresponding to Cases 1.1a and 1.1b areand, respectively. For problems P1c
the general solution iswith the eigenvalues determined by the equation. The determination of the first eigenvalues is graphically presented in Figure 3.
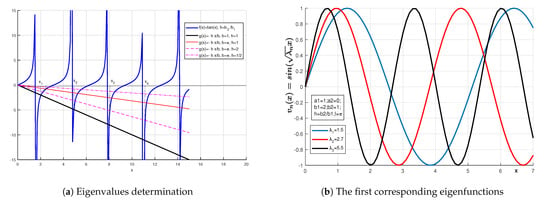
Figure 3.
The eigenvalues determination and the corresponding eigenfunctions example (15).
- Case 1.2
The eigenfunctions corresponding to Case 1.2 arewith the eigenvalues determined by the equation.
- Case 2
The eigenfunctions corresponding to Case 2.1 arewith the eigenvalues determined by the equation. If b has the form, thenis the eigenvalue for the problem. In Figure 4a, the determination of the first eigenvalues is graphically presented as the roots of the functionwith notationand in Figure 4b, the corresponding eigenfunctions are plotted.
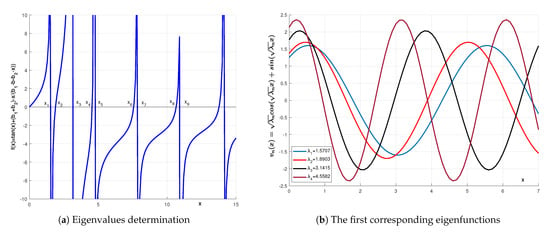
Figure 4.
The eigenvalues determination and the corresponding eigenfunctions example 2.1.
For Case 2.2, the eigenfunctions are, and the eigenvalues are the solutions of the nonlinear equation.
Example 3.
The conditions can be considerably weakened with respect to continuity and differentiability. In some cases, changes of variables, dependent and independent, may transform a problem from singular to regular; see [4].
For construction of the solutions, the Dirac function is used. Green’s function verifiesand expresses the response under homogeneous boundary conditions to a forcing function consisting of a concentrated unit of inhomogeneity at
For the problemin;,, the solution isusing the Green function
That leads to the representation
Remark 4.
Using the definition of the norm convergence, namely: “A sequenceinconverges toif, i.e.,innorm”, some sequencescould be used instead ofin order to obtain the Green function.
Starting from the definitionand use some properties (see [6,9]):
δ is symmetric with,,,or, also
3. Variational RSL Problems
We define problem as follows:
and the set . For , we have (see [10,11]).
Variational problem (VP) associated to the problem is as follows: find such that , with
The functional , , expresses the difference between the internal elastic energy and the load potential.
Lemma 1.
- (i)
- is linear;
- (ii)
- Letwith λ positive eigenvalue of RSL (), then is bilinear functional, positive and symmetric.
Proof.
(i) Let and , then is the result that is obtained from the properties of the scalar product.
(ii) Let and then
Let and , then
Let , then
The weight function in is positive and in RSL() conditions, is a positive function in accordingly , , and hence is positive. Let , then
Consequently, is symmetric. □
Minimization problem () associated to is as follows.
Find such that with
Theorem 1.
- (1)
- is the solution ofif u is solution of;
- (2)
- , u solution of, then u solution of.
Proof.
(1) (i) Let be the solution of , then . For any , denoting , we have
meaning that
(1) (ii) Let be the solution of , then ; therefore, .
Using , , one finds meaning
Using the positivity of the term , one finds
meaning the u solution of .
(2) Let solution of , then
In case of a self-adjoint operator for L, such as in the case of periodic or antiperiodic boundary conditions, we have
and one obtains for that is over interval .
This means that the u solution of also verifies the boundary conditions. □
The theorem proved above transfers the search space of the solution u of the problem to the search space for the solution of the problem , where the existence is ensured through the Lax–Milgram theorem for a coercive quadratic form, even more general from the Lions–Stampacchia theorem, where is of a symmetric positive bilinear form.
4. Variational Approaches for VP of RSL
4.1. Nehari Variational Method
Let and be a function that has continuous second-order derivatives with respect to all of its arguments. According to the Euler–Lagrange variational principle, a necessary condition for the functional
to be stationary at u is that u is a solution of the Euler–Lagrange equation (see [3])
with the Dirichlet conditions
For a nonlinear RSL problem,
for .
For the problem (22), looking for the extremum value of the functional
for the set the functional is not bounded. Using the Nehari method, a new condition on the function f and u is imposed:
which is satisfied by the solutions of (22).
Let us consider the set . For I given, let . Then such that and also (see [12]), for with , is a positive solution of (22).
The function is continuous with respect to both arguments and
Remark 5.
For a partitionof the interval I, over each subinterval, considernormalized with the Nehari condition and
then the solutionis inand is vanishingtimes over interval I. Additionally, ifthenis not a minimum of.
4.2. Variational Estimations for RSL
In the following, two variational estimation methods are presented, the shooting method and bisection method, consisting in solving the variational equations associated to the problem given.
- Shooting method:
For eigenvalue and , the corresponding eigenfunction and is the normalized eigenfunction with , which is the solution for the variational equation associated to (28) with the initial value conditions:
with (see [4]).
Algorithm of the shooting method:
- Step 1
- Determine an interval of an eigenvalue and make a guess;
- Step 2
- Solve VIP () and find the eigenfunction ;
- Step 3
- If or given, then Stop.Else, find the root of in a given interval and update .GO TO Step 1.
- Bisection method
For SL eigenvalue problem with functions and constants satisfying RSL assumptions (1)–(4):
the related variational initial value problem is
For the eigenvalue denoting , the corresponding eigenfunction has , and is the normalized eigenfunction such that . In this case, is the eigenvalue for if .
The function satisfies the variational initial value problem .
and is a continuously differentiable function on with .
Remark 6.
Under RSL assumptions (1)–(4), if λ is the eigenvalue ofandis the corresponding normalized eigenfunction, then there existscontaining λ such thatand the approximate sequenceis convergent,andare the corresponding eigenfunctions obtained by solvingsuch thatand.
For instance, the solution of the problem
with verifying (RSL) conditions (1)–(4) is obtained solving the associated
The solution of is determined such that with and is a particular solution of and v satisfies
4.3. Iterative Variational Methods for RSL
Among analytical estimation methods, the variational iteration method (VIM or He’s methods, see [13]) and homotopy perturbation method (HPM) (see [14,15]) are considered to find approximations for the nonlinear equation
under different boundary conditions (Dirichlet, Neumann or general case .
4.3.1. He’s Variational Method (VIM)
For the nonlinear Equation (35), we define N as the nonlinear operator such that (35) becomes
and the correction functional for the general Lagrange multiplier method is
with considered as restricted variation, , and a Lagrange multiplier determined through the calculus of variations from (37); see [10,16].
4.3.2. Homotopy Perturbation Method (HPM)
For the nonlinear Equation (35) we define the operators and N for
given by the maximum order of derivation from the equation and by the form of the equation; see [14,17]. We write the zero-order equation associated with the initial equation:
with h as a nonzero parameter, as a first analytical approximation of the function u with conditions
where is a initial function that verifies the boundary conditions could be obtained from polynomial approximation developing the function f.
We develop by a Taylor series in the vicinity of the origin in relation to the second variable
A good choice for h (in relation to the error obtained compared to the initial equation) leads to .
The equation of order m:
- case
- case
with boundary conditions
For the approximation of order 1, we have
with
The parameter h at step 1 is chosen such that the value of is the smallest possible and becomes the next value of , but also could be taken as . Iteratively, for
with start condition being known and stop condition .
4.3.3. Applications
Let us consider a nonlinear RSL, such as the following problem:
The corresponding correction functional (37) to the problem (46) for the variational iteration method leads to the general Lagrange multiplier
and for , one finds
with . Particularly, for , the first step leads to
from where
For , we have
Constants A and B are determined from the boundary condition imposed to the last function computed, and for , boundary conditions are imposed, resulting in a system for the constants . Thus, the solution of the problem is obtained.
One obtains
from where
The solution will be .
Additionally, if we consider the nonlinearity in (46) through function , that is, for , we are in the harmonic oscillator case (), then the following correction functional appears
as an eigenfunction of the equation Hermite polynomials appears.
For and ()
and for case
The two methods are fast convergent methods.
Variational iteration methods, such as VIM and HPM, could be used also for nonlinear propagation problems in which the temporal variable is considered, for example, for the coupled pseudo-parabolic equation, or the one-dimensional coupled Burgers equation numerically studied in [18]. The nonlinear coupled Burgers equations are also studied in [19] as an application of EOHAM (extension optimal homotopy asymptotic method) in which homotopy is combined with perturbation techniques. The Newell–Whitehead–Segel equation (NWSE) was also studied using the VIM technique and He’s polynomials [20].
5. Conclusions
In the first part of the paper, definitions and results are presented connected to regular and singular Sturm–Liouville problems. Some types of direct singular SLPs were solved in [5,21] and a study of the inverse SLP algorithm was made. We defined in a different manner the SLP, and different boundary conditions were considered. All the figures were made using Matlab codes, the academic versions.
In the core of the paper, the variational formulation (VP) through a bilinear functional positive and symmetric is made. The minimization problem (MP) is also outlined through the functional of energy, and the equivalence of the formulations under some conditions imposed for RSL problems is proved.
Variational estimations are in the final part of the paper through the construction of the solution trough variational equations associated to the problem, such as the shooting method and bisection method, or using a sequential analytical approximate solution that is constructed according to the accuracy established. Here, we present He’s variational method and the homotopy method. In the closing part, a is taken into account and the sequentiality of the transition from one step to another is specified for both methods. Al-Khaled et al. (see [22]) solve numerically a SLP using the general Sinc–Galerkin and Newton method but for different types of boundary conditions. In the paper, He’s method, the Adomian method and Lagrange multiplier for special ODEs were given in detail, numerical results being obtained for Duffing and Titchmarch equations. We considered our applications the interval and general conditions for a linear and a nonlinear case of .
In [23] spectral problems of the nonlocal SLP with an integral were studied. Kernel of the operator, properties of the first eigenvalue and oscillation properties of eigenfunctions to the nonlocal problem were expressed. Additionally, the solution of the Cauchy problem for the SL equation on a star graph was constructed in [24].
For fractional differential equations, VIM could also be a very powerful instrument, in which Equations (36) and (37) are written using the Caputo fractional derivative, see [25]. This is our intention for the new study.
Nonlinear RSL problems could appear in the case of non-Newtonian fluid flows. Variational estimation methods are efficient techniques for finding analytical approximate solutions for a class of problems and also for optimal problems when looking for a minimum, using the functional of energy.
Author Contributions
Conceptualization, E.C.C.; methodology, E.C.C. and C.D.B.; software, E.C.C. and C.D.B.; validation, E.C.C. and C.D.B.; formal analysis, E.C.C.; investigation, E.C.C. and C.D.B.; writing—original draft preparation, E.C.C. and C.D.B.; writing—review and editing, E.C.C. and C.D.B.; supervision, E.C.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
The authors want to thank to the referees who allowed us to improve ourselves and our article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dautray, R.; Lions, J.L. Mathematical Analysis and Numerical Methods for Science and Technology; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Fowler, A.C. Mathematical Models in the Applied Sciences; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Tyn Myint-U, T.; Debnath, L. Linear Partial Differential Equations for Scientists and Engineers, 4th ed.; Springer: Berlin, Germany, 2007; ISBN 0-8176-4393-1. [Google Scholar]
- Guenther, R.B.; Lee, J.W. Sturm-Liouville Problems. Theory and Numerical Implementation; CRC Press: Boca Raton, FL, USA, 2019; ISBN 9781138345430. [Google Scholar]
- Perera, U.; Böckmann, C. Solutions of Sturm-Liouville Problems. Mathematics 2020, 8, 2074. [Google Scholar] [CrossRef]
- Hassana, A.A. Green’s Function Solution of Non-Homogenous Regular Sturm-Liouville Problem. J. Appl. Comput. Math. 2017, 6, 362. [Google Scholar] [CrossRef]
- Klimek, M. Spectrum of Fractional and Fractional Prabhakar Sturm–Liouville Problems with Homogeneous Dirichlet Boundary Conditions. Symmetry 2021, 13, 2265. [Google Scholar] [CrossRef]
- Razdan, A.K.; Ravichandran, V. Fundamentals of Partial Differential Equations; Springer: Singapore, 2022. [Google Scholar] [CrossRef]
- Guo, H.; Qi, J. Sturm–Liouville Problems Involving Distribution Weights and an Application to Optimal Problems. J. Optim. Theory Appl. 2020, 184, 842–857. [Google Scholar] [CrossRef]
- Altintan, D.; Ugur, O. Variational iteration method for Sturm-Liouville differential equations. Comput. Math. Appl. 2008, 58, 322–328. [Google Scholar] [CrossRef]
- Johnson, C. Numerical Solution of Partial Differential Equations by the Finite Element Method; Cambridge University Press: Cambridge, UK, 1987; ISBN 0521345146. [Google Scholar]
- Chen, C.N. A survey of nonlinear Sturm-Liouville equations. In Sturm-Liouville Theory: Past and Present; Amrein, W.O., Hinz, A.M., Eds.; Pearson D.P.: Basel, Switzerland, 2005; pp. 201–216. [Google Scholar]
- He, J.H.; Wu, X.H. Variational iteration method: New development and applications. Comput. Math. Appl. 2007, 54, 881–894. [Google Scholar] [CrossRef]
- Hayat, T.; Khan, M.; Ayub, M. On the non-linear flows with slip boundary condition. Z. Angew. Math. Phys. 2005, 56, 1012–1029. [Google Scholar] [CrossRef]
- Yusufoglu, E.; Bekir, A. On the extended tanh method applications of nonlinear equations. Int. J. Nonlinear Sci. 2007, 4, 10–16. [Google Scholar]
- Neamaty, A.; Darzi, R. Comparison between the Variational Iteration Method and the Homotopy Perturbation Method for the Sturm-Liouville Differential Equation. Bound. Value Probl. 2010, 2010, 317369. [Google Scholar] [CrossRef]
- Zhang, T.-T.; Jia, L.; Wang, Z.-C. Analytic Solution for Steady Slip Flow between Parallel Plates with Micro-Scale Spacing. Chin. Phys. Lett. 2008, 25, 180. [Google Scholar] [CrossRef]
- Nadeem, M.; Yao, S. Solving system of partial differential equations using variational iteration method with He’s polynomials. Int. J. Math. Comput. Sci. 2019, 19, 203–211. [Google Scholar] [CrossRef]
- Fiza, M.; Chohan, F.; Ullah, H.; Islam, S.; Bushnaq, S. An extension of the optimal homotopy asymptotic method with applications to nonlinear coupled partial differential equations. J. Math. Comput. Sci. 2019, 19, 218–229. [Google Scholar] [CrossRef]
- Nadeem, M.; Yao, S.; Parveen, N. Solution of Newell-Whitehead-Segel equation by variational iteration method with He’s polynomials. J. Math. Comput. Sci. 2020, 20, 21–29. [Google Scholar] [CrossRef]
- Herron, I.H. Solving singular boundary value problems for ordinary differential equations. Caribb. J. Math. Comput. Sci. 2013, 15, 1–30. [Google Scholar]
- Al-Khaled, K.; Hazaimeh, A. Comparison Methods for Solving Non-Linear Sturm–Liouville Eigenvalues Problems. Symmetry 2020, 12, 1179. [Google Scholar] [CrossRef]
- Liu, Z.; Qi, J. The Properties of Eigenvalues and Eigenfunctions for Nonlocal Sturm–Liouville Problems. Symmetry 2021, 13, 820. [Google Scholar] [CrossRef]
- Kanguzhin, B.; Aimal Rasa, G.H.; Kaiyrbek, Z. Identification of the Domain of the Sturm–Liouville Operator on a Star Graph. Symmetry 2021, 13, 1210. [Google Scholar] [CrossRef]
- Nagdy, A.; Hashem, K.H. Numerical solutions of nonlinear fractional differential equations by variational iteration method. J. Nonlinear Sci. Appl. 2021, 14, 54–62. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).