Abstract
The paper is devoted to bilevel problems: variational inequality problems over the set of solutions to the generalized equilibrium problems in a Hilbert space. To solve these problems, an iterative algorithm is proposed that combines the ideas of the Tseng’s extragradient method, the inertial idea and iterative regularization. The proposed method adopts a non-monotonic stepsize rule without any line search procedure. Under suitable conditions, the strong convergence of the resulting method is obtained. Several numerical experiments are also provided to illustrate the efficiency of the proposed method with respect to certain existing ones.
Keywords:
Hilbert space; monotone operator; Tseng’s extragradient method; regularization method; strong convergence MSC:
90C25; 47J25; 47H05; 65K15; 65K15
1. Introduction
Let be a real Hilbert space, let be a closed, convex and nonempty subset of , let be an operator, and let be a bifunction. The generalized equilibrium problem ( GEP) is defined as: find a point such that
Denote by the set of solutions of the GEP. Next, we give two special cases of the GEP (1).
(I) If , then the GEP (1) becomes the equilibrium problem (EP): find a point such that
The GEPs unifies in a simple form many mathematical models in applied sciences, such as variational inequalities [1], operator Equations [2,3], optimization problems [4], fixed point problems [5], saddle point problems [6], the Nash equilibrium problem [7] and so on. Due to its importance in applications, this problem has received attention from several authors.
(II) If for all then the GEP (1) becomes the variational inequality problem (VIP): find a point such that
where the solutions set is denoted by . The VIP theory was proposed independently by Fichera [8] and Stampacchia [9]. It provides a natural, convenient and unified framework for the study of many problems in engineering operation research, necessary optimality conditions and engineering mechanics. It covers, as special cases, well-known problems in mathematical programming, such as systems of optimization and control problems [6], traffic network problems [10], nonlinear Equations [11] and fixed point problems [12].
Recently, many authors introduced and studied various methods for solving the VIP. The simplest and oldest projection method is the gradient projection method:
It is well known that the iterative process defined by (3) converges to an element of when is strongly monotone and L-Lipschitz continuous. In order to weaken such a strong hypothesis, Korpelevich [13] introduced the following extragradient method (EGM) for an L-Lipschitz continuous and monotone operator . This method is of the form:
where . They proved that the sequence generated by the EGM converges to a solution of the VIP. Notice that the EGM is required to calculate the projection onto the feasible set and evaluations of the cost operator twice in each iteration. This, in general, may be computationally expensive if the feasible set and the operator have a complicated structure. Thus, it might affect the efficiency of the method (see, e.g., [14,15,16,17]). In order to overcome the drawback, the Tseng’s extragradient method (TEGM) [18] has been suggested. This method is described as follows (Algorithm 1):
| Algorithm 1: The Tseng’s extragradient method (TEGM). |
|
Initialization: Given as arbitrary, take . Step 1. Calculate |
A major improvement on the TEGM is that it requires computing only one projection onto in each iteration. Furthermore, the main shortcoming of the TEGM is the choice of stepsize. It should be noted that the stepsize takes a significant part in the convergence analysis. We should also notice that the stepsizes are defined to be dependent on the Lipschitz constant of the monotone operator in the TEGM.
Recently, Yang et al. [19] introduced a new self-adaptive subgradient extragradient method (STEGM) for solving the VIPs. In the following Algorithm 2, the mapping g is a contraction on . It should be noted that Algorithm 2 has strong convergence theorems established in real Hilbert spaces. However, the stepsize used in Algorithm 2 is monotonically decreasing, which may also affect the execution efficiency of such a method. Following the ideas of the EGM, the TEGM and the STEGM, Tan and Qin [20] proposed the following inertial extragradient methods with non-monotonic stepsizes (SVTEGM) for solving the VIPs in Hilbert spaces.
| Algorithm 2: Self-adaptive Tseng’s extragradient method (STEGM). |
|
Initialization: Given as arbitrary, take , and . Step 1. Calculate Step 2. Compute |
They proved that the iterative process constructed by Algorithm 3 converges to a solution of the VIP (2) under certain appropriate conditions.
| Algorithm 3: The self-adaptive viscosity-type inertial Tseng extragradient algorithm (SVTEGM). |
|
Initialization: Given as arbitrary, take , , , , and . Step 1. Calculate |
In recent years, the bilevel variational inequality problem (BVIP), has spurred the interest of many authors; see, e.g., [21]. The BVIP in is presented as follows: find such that
where and are operators. This class is interesting because it includes a couple of classes of mathematical programs with variational inequality problems, equilibrium constraints, linear complementarity problems, bilevel optimization problems and bilevel linear programs.
In the present work, we consider a more general bilevel problem: a variational inequality over the set of solutions to the generalized equilibrium problem (VIOGE). Furthermore, this problem is described as follows: find such that
where f is a bifunction, is strongly monotone and is monotone.
It is easy to see that the VIOGE is a special class of bilevel equilibrium problems. The bilevel equilibrium problems have interested many authors, and particularly, the bilevel equilibrium problem has been widely and intensively studied after the appearance of the monograph books [22]. It is worth noting that the VIOGE contains some classes of mathematical programs with equilibrium constraints [23], minimum-norm problems of the solution set of variational inequalities [24], variational inequalities [25], bilevel convex programming models [26], bilevel minimization problems [27] and bilevel linear programming [28]. For these reasons, we find that it is necessary to study and propose new iterative methods with better efficiency for solving the VIOGE.
Inspired by Korpelevich [13], Tseng [18] and Tan and Qin [20], we research the VIOGE (8) and introduce a new iterative method for finding a solution of the VIOGE (8) in Hilbert spaces. The proposed method is constructed around the TEGM, the inertial idea, and the regularization technique and uses a non-monotonic stepsize rule without any line search procedure. Strong convergence theorems are established under appropriate conditions. Several numerical experiments are also provided to show the effectiveness and the fast convergence of the new method over certain known methods.
2. Preliminaries
In this section, we assume that is a closed, convex and nonempty subset of a Hilbert space . The set of real numbers is denoted by . The symbols “→”and “⇀” denote the strong and weak convergence, respectively. For a given sequence , denotes a set of weak limits of . The set of fixed points of a mapping is denoted by .
Definition 1
([7]). An operator is called:
- (i)
- monotone, if
- (ii)
- α-strongly monotone, if there exists a number such that
- (iii)
- r-contractive, if there exists a positive number such that
- (iv)
- k-Lipschitz continuous, if there exists such that
- (v)
- nonexpansive, if
Definition 2
([29]). A single-valued operator is called hemicontinuous if the real function
is continuous on for all .
Definition 3
([30]). The mapping which assigns to each point the unique point such that
is called the metric (or nearest point) projection of onto .
Proposition 1
([31]). The metric projection satisfies
Given and then if there holds
Assumption 1.
Assume is a closed, nonempty, and convex subset of a Hilbert space . Let be a bifunction satisfying the following restrictions:
- (A1)
- , ;
- (A2)
- f is monotone, i.e., for all
- (A3)
- for all is convex and lower semicontinuous; and
- (A4)
- for all
Lemma 1
([1]). Let be a bifunction satisfying Assumption 1 (A1)–(A4). For and , define a mapping by:
Then, it holds that:
- (i)
- is nonempty and single-valued;
- (ii)
- is a firmly nonexpansive mapping, that is, for all
- (iii)
- and
- (iv)
- is convex and closed.
Remark 1.
Assume is Lipschitz continuous and monotone, is a bifunction satisfying Assumption 1 (A1)–(A4). We find that the mapping also satisfies Assumption 1. Thus, we deduce, by Lemma 1, that
- (i)
- is nonempty and single-valued;
- (ii)
- is a firmly nonexpansive mapping;
- (iii)
- and
- (iv)
- is closed and convex.
Lemma 2.
Assume is a bifunction satisfying Assumption 1 (A1)–(A4), is monotone and L-Lipschitz continuous, is τ-strongly monotone and k-Lipschitz continuous. Then, is a contraction on provided
Proof.
For , we have, from Lemma 1(ii), that
Since is -strongly monotone and k-Lipschitz continuous, then one finds . Notice that
Then, we deduce that for all . By using the assumption that we derive . Thus, for each Furthermore, is a contraction on provided This completes the proof. □
Lemma 3.
Assume is monotone and hemicontinuous, and is a bifunction satisfying Assumption 1 (A1)–(A4). Then, is a solution to the GEP (1) if is a solution to the problem: find a point such that
Proof.
Let be a solution of the GEP (1). From (A2) and the monotonicity of , one finds, for all , that
Thus, is a solution of the problem (10).
Conversely, let be a solution of the problem (10). For all , let and then . Since is a solution of the problem (10), it follows that
From Assumption 1 (A1) and (A3), we have
Letting and noticing (A4) and the fact that is hemicontinuous, we obtain
Therefore, is a solution of the GEP (1). This completes the proof. □
Applying Lemma 2, we obtain the following results immediately.
Corollary 1
([32]). Suppose is a monotone and hemicontinuous mapping, and then is a solution to the VIP (2) if is a solution to the problem: find such that
Lemma 4
([33]). Assume is a sequence in . If and , then .
Lemma 5
([34]). Assume is a sequence of nonnegative real numbers. Suppose that
where satisfy the conditions
- (i)
- ,
- (ii)
- .
Then, .
3. Main Results
In this section, we focus on the strong convergence analysis for the VIOGE by using the Tseng’s extragradient method, the inertial idea and regularization technique. In what follows, suppose that is a bifunction satisfying (A1)–(A4), is L-Lipschitz continuous and monotone, is -strongly monotone and k-Lipschitz continuous. Additionally, we also assume that is nonempty. One finds from Remark 1(iv) that is closed and convex. This, by the strong monotonicity and continuity of , ensures the uniqueness of solutions to the VIOGE (8). Together with the GEP (1), we consider the following regularized generalized equilibrium problem (RGEP) for each : we find a point such that
Remark 2.
Under above assumptions, one deduces that RGEP (13) has a unique solution. Indeed, the solutions set of RGEP (13) is . It is also not hard to see from Remark 1 (iii) that for each . In particular, for each by Lemma 2, the mapping is contractive. Then, this mapping has a unique fixed point by the Banach contraction principle. Hence, RGEP (13) has a unique solution, which is denoted by , for each
Now, we study some properties of the solution .
Lemma 6.
It holds that
- (i)
- ;
- (ii)
- , ;
- (iii)
- , , where M is a positive constant.
Proof.
(i) Taking an arbitrary , one has for all , which with , implies that
Since is the solution of the RGEP, one then finds
Substituting into (15), one obtains
Then, by combining this inequality with (14), one finds
Observe that
It follows from the -strong monotonicity of and (17) that
Utilizing (A2) and the monotonicity of , one deduces
This, together with the fact that , leads to
Thus, one deduces that is bounded.
(ii) Since is closed and convex, then is weakly closed. Therefore, there is a subsequence of and some element such that In view of (A2) and the monotone property of , we deduce, for all , that
Considering the fact that and noticing (22), one infers that
As is convex and lower semicontinuous, then it is also weakly lower semicontinuous. Taking , noticing (A3) and the boundedness of (see, Lemma 6(i)), one concludes that
which, by Lemma 2, immediately yields
It follows from (20) that
Passing to the limit in (24) as and noticing the fact one infers that
which implies, by Corollary 1, that
Hence, is the solution of the VIOGE (8). Since the solution of the VIOGE (8) is unique, one deduces that Therefore, the set only has one element —that is, Thus, one finds . Further, utilizing (20), one finds
Passing to the limit in the above inequality as and noticing the fact that , one deduces . This is the desired result (ii).
(iii) Assume that , are the solutions of the RGEP. Then, one has
and
Summing up the above two inequalities, one finds
Noting the monotonic property of and (A2), one finds
or, equivalently,
It follows from the -strong monotonicity of that
which leads to
Thus, one concludes that
In the following, combining with the Tseng’s extragradient method, the inertial idea and the regularization method, we propose a new numerical algorithm for solving the VIOGE (8).
Lemma 7
([20]). The sequence generated by (27) is well-defined and and , where
Assumption 2.
- (C1)
- and ;
- (C2)
- ;
- (C3)
- ; and
- (C4)
Theorem 1.
Assume is a nonempty convex closed subsets of real Hilbert space , is a bifunction satisfying (A1)–(A4), is L-Lipschitz continuous and monotone. Then, the sequence constructed by Algorithm 4 converges strongly to the unique solution of the (8) under Assumption 2 (C1)–(C4).
| Algorithm 4: The Tseng’s extragradient method with regularization (TEGMR). |
| Initialization: Take , , , , . Choose a nonnegative real sequence such that . Let is arbitrary. Step 1.Compute |
Proof.
In view of Lemma 6(ii) and (C1), one obtains as . Therefore, it is sufficient to show that
Observe that
We also notice that
and
Since is a solution of RGEP (13) for each , we obtain, by Remark 2, that
In view of Lemma 1(ii), one finds that
which implies
That is,
or equivalently
Now, select three positive numbers such that
Utilizing assumptions , and applying Lemma 7 and Assumption 2 (C3), it follows that there exists such that
On the other hand, in terms of the Cauchy–Schwartz inequality, one concludes that
By relation (35), (38), (39) and (41), one finds
where and By condition (C1), one obtains that and . Furthermore, one derives from condition (C2) and (C3) that
Applying Lemma 5 to (42), one infers . Thus, one finds . □
4. Application to the BVIP
Assume be a closed convex and nonempty subset of . Further assume , . Noticing Proposition 1, one obtains Furthermore, the VIOGE becomes the BVIP. Next, by Theorem 1, we give the following result for the BVIP.
Theorem 2.
Assume that is a closed convex and nonempty subset of Hilbert space , is L-Lipschitz continuous and monotone. Further, assume Then, the sequence constructed by Algorithm 5 converges strongly to the unique solution to the BVIP (7) under Assumption 2 (C1)–(C4).
| Algorithm 5: Tseng’s extragradient method with regularization for the BVIP. |
| Initialization: Take , , , , . Choose a nonnegative real sequence such that . Let be arbitrary. Step 1.Compute |
5. Numerical Examples
In this subsection, several numerical examples are supported to show the behavior and performance of our Algorithm 4 (TEGMR) as well as comparing it with Algorithm 1 (TEGM of Tseng [18]), Algorithm 2 (STEGM of Yang et al. [19]) and Algorithm 3 (SVTEGM of Tan and Qin [20]).
Example 3.
Let be the linear spaces whose elements are all 2-summable sequences of scalars in —namely,
with inner product and defined by and , respectively, where , . Let be defined by , be defined by , Then, , Define the set . Let the bifunctions be given by for all . We find that , and 0 is a unique solution to VIOGE (8). Choose , , , . The stopping criterion used for our computation is We test our Algorithm 4 for different values of and as follows:
Case I: and ;
Case II: and ;
Case III: and ; and
Case IV: and .
Example 4.
Let with norm and inner product , . The feasible set is given by We choose Let be given by , be given by , be given by for all . We find that A is monotone and -Lipschitz continuous. It is easy to check that and 0 is unique solution to VIOGE (8). Let us , , , . Using as our stopping criterion, we test our Algorithm 4 for different values of and as follows:
Case I: and ;
Case II: and ;
Case III: and ; and
Case IV: and .
Example 5.
Let with inner product defined by . Let , where q is a vector in and N is a matrix. Let where Q is a symmetric and positive-definite matrix of size , and q is a vector in . It is easy to check that is monotone and Lipschitz continuous with the constant , and is Lipschitz continuous and strongly monotone. Define the set . Let the bifunctions be given by for all . We deduce that . Furthermore, 0 is unique solution to VIOGE (8). Choose , , , . The maximum number of iterations is 300 as the stopping criterion and the initial values are randomly generated by rand in MATLAB. We test Algorithm 4 with different values m as follows.
According to Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6, one finds that the TEGMR performs better than TEGM, STEGM and SVTEGM in terms of the CPU-time taken for computation.
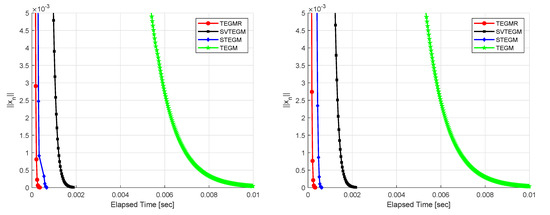
Figure 1.
Example 3, (left): Case I and (right): Case II.
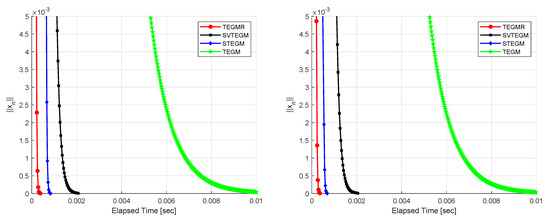
Figure 2.
Example 3, (left): Case III and (right): Case IV.
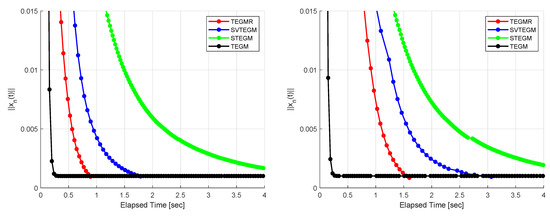
Figure 3.
Example 4, (left): Case I and (right): Case II.
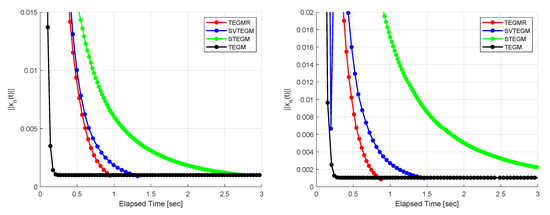
Figure 4.
Example 4, (left): Case III and (right): Case IV.
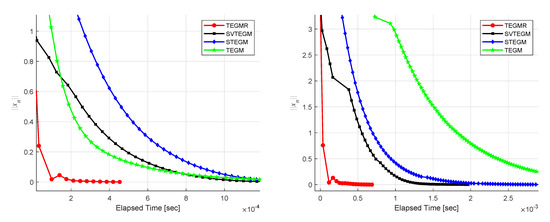
Figure 5.
Example 5, (left): m = 5 and (right): m = 10.
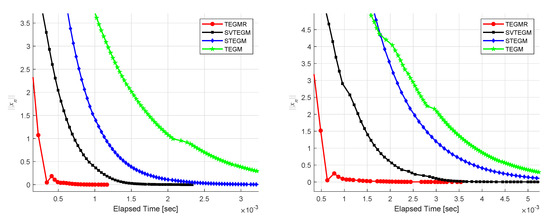
Figure 6.
Example 5, (left): m = 100 and (right): m = 200.
6. Conclusions
In the paper, we considered a more general bilevel problem: a variational inequality over the set of solutions of the generalized equilibrium problem in a Hilbert space. The new proposed problem covers many well-known problems, such as the bilevel variational inequality problem, generalized equilibrium problem and bilevel optimization problems. We also introduced a new iterative method for solving the proposed bilevel problem in real Hilbert spaces.
The introduced method was constructed around the TEGM, the inertial idea and the regularization technique, and we used a non-monotonic stepsize rule without any line search procedure. Under some suitable conditions, strong convergence of the sequences generated by the proposed method was obtained. Several numerical experiments were also provided to demonstrate the effectiveness and the fast convergence of the new method over certain known methods.
Author Contributions
Conceptualization, Y.S.; Data curation, Y.S.; Funding acquisition, Y.S.; Methodology, Y.S. and O.B.; Supervision, O.B.; Writing—original draft, Y.S. and O.B.; Writing—review & editing, Y.S. and O.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Key Scientific Research Project for Colleges and Universities in Henan Province (grant number 20A110038).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank reviewers and the editor for valuable comments for improving the original manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Combettes, P.L.; Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- Chidume, C.E.; Măruşter, Ş.T. Iterative methods for the computation of fixed points of demicontractive mappings. J. Comput. Appl. Math. 2010, 234, 861–882. [Google Scholar] [CrossRef]
- Mennouni, A. A regularization procedure for solving some singular integral equations of the second kind. Internat. J. Differ. Equ. 2013, 8, 71–76. [Google Scholar]
- Blum, E.; Oettli, W. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Thong, D.V.; Hieu, D.V. Weak and strong convergence theorems for variational inequality problems. Numer. Algor. 2018, 78, 1045–1060. [Google Scholar] [CrossRef]
- Alakoya, T.O.; Jolaoso, L.O.; Mewomo, O.T. A general iterative method for finding common fixed point of finite family of demicontractive mappings with accretive variational inequality problems in Banach spaces. Nonlinear Stud. 2020, 27, 1–24. [Google Scholar]
- Yao, Y.; Cho, Y.J.; Liou, Y.C. Algorithms of common solutions for variational inclusions, mixed equilibrium problems and fixed point problems. Eur. J. Oper. Res. 2011, 212, 242–250. [Google Scholar] [CrossRef]
- Fichera, G. Sul problema elastostatico di Signorini con ambigue condizioni al contorno. Atti Accad. Naz. Lincei Rend. Cl. Sci. Fis. Mat. Nat. 1963, 34, 138–142. [Google Scholar]
- Hartman, P.; Stampacchia, G. On some nonlinear elliptic differential functional equations. Acta Math. 1966, 115, 271–310. [Google Scholar] [CrossRef]
- Bnouhachem, A.; Chen, Y. An iterative method for a common solution of generalized mixed equilibrium problem, variational inequalities and hierarchical fixed point problems. Fixed Point Theory Appl. 2014, 2014, 155. [Google Scholar] [CrossRef][Green Version]
- Aliev, N.; Hosseini, S.M. A regularization of Fredholm type singular integral equations. Int. J. Math. Math. Sci. 2001, 26, 123–128. [Google Scholar] [CrossRef]
- Song, Y.; Bazighifan, O. A new alternative regularization method for dolving generalized equilibrium problems. Mathematics 2022, 10, 1350. [Google Scholar] [CrossRef]
- Korpelevich, G.M. An extragradient method for finding saddle points and for other problems. Matecon 1976, 12, 747–756. [Google Scholar]
- Wairojjana, N.; Younis, M.; Rehman, H.U.; Pholasa, N. Modified viscosity subgradient extragradient-like algorithms for solving monotone variational inequalities problems. Axioms 2020, 9, 118. [Google Scholar] [CrossRef]
- Rehman, H.; Kumam, P.; Ozdemir, M.; Argyros, I.K.; Kumam, W. Three novel inertial explicit Tseng’s extragradient methods for solving pseudomonotone variational inequalities. Optimization 2021, 2021, 1–34. [Google Scholar] [CrossRef]
- Hammad, H.A.; Rehman, H.; De la Sen, M. Advanced Algorithms and Common Solutions to Variational Inequalities. Symmetry 2020, 12, 1198. [Google Scholar] [CrossRef]
- Abubakar, J.; Kumam, P.; ur Rehman, H. Self-adaptive inertial subgradient extragradient scheme for pseudomonotone variational inequality problem. Int. J. Nonlinear Sci. Numer. Simul. 2022, 23, 77–96. [Google Scholar] [CrossRef]
- Tseng, P. A modified forward-backward splitting method for maximal monotone mappings. SIAM J. Control Optim. 2000, 38, 431–446. [Google Scholar] [CrossRef]
- Yang, J.; Liu, H. Strong convergence result for solving monotone variational inequalities in Hilbert spaces. Numer. Algor. 2019, 80, 741–752. [Google Scholar] [CrossRef]
- Tan, B.; Qin, X. Self adaptive viscosity-type inertial extragradient algorithms for solving variational inequalities with applications. Math. Model. Anal. 2022, 27, 41–58. [Google Scholar] [CrossRef]
- Mordukhovich, B. Variational Analysis and Applications; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Dempe, S. Foundations of Bilevel Programming; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Luo, Z.Q.; Pang, J.S.; Ralph, D. Mathematical Programs with Equilibrium Constraints; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Yao, Y.; Marino, G.; Muglia, L. A modified Korpelevich’s method convergent to the minimum-norm solution of a variational inequality. Optimization 2014, 63, 559–569. [Google Scholar] [CrossRef]
- Giannessi, F.; Maugeri, A.; Pardalos, P.M. Equilibrium Problems: Nonsmooth Optimization and Variational Inequality Models; Kluwer Academic: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Trujillo, C.R.; Zlobec, S. Bilevel convex programming models. Optimization 2009, 58, 1009–1028. [Google Scholar] [CrossRef]
- Solodov, M. An explicit descent method for bilevel convex optimization. J. Convex Anal. 2007, 14, 227–237. [Google Scholar]
- Glackin, J.; Ecker, J.G.; Kupferschmid, M. Solving bilevel linear programs using multiple objective linear programming. J. Optim. Theory Appl. 2009, 140, 197–212. [Google Scholar] [CrossRef]
- Petrot, C.N. Regularization and iterative method for general variational inequality problem in hilbert spaces. J. Inequal. Appl. 2011, 2011, 21. [Google Scholar]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Space; Springer: New York, NY, USA, 2011. [Google Scholar]
- Bauschke, H.H.; Combettes, P.L. A weak-to-strong convergence principle for Fejrmonotone methods in Hilbert spaces. Math. Oper. Res. 2001, 26, 248–264. [Google Scholar] [CrossRef]
- Takahashi, W. Nonlinear Functional Analysis: Fixed Point Theory and Its Applications; Yokohama Publishers: Yokohama, Japan, 2000. [Google Scholar]
- Goebel, K.; Kirk, W.A. Topics in Metric Fixed Point Theory; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Xu, H.K. Iterative algorithm for nonlinear operators. J. Lond. Math. Soc. 2002, 66, 240–256. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).