1. Introduction
The interaction between predator and prey is one of the most popular and interesting research topics for many mathematicians and ecologists. Many researchers have studied the dynamic behavior of prey-predator systems and behavioral phenomena among species in ecology. This also contributes to an increase in the continuous model size of the populations [
1,
2,
3,
4,
5,
6]. In addition, some authors have also studied the complexity, stability, and conditional requirements for the formation of spatial patterns in prey-predator systems [
7,
8,
9,
10].
More and more studies show that the discrete-time system is more suitable than the continuous system for small populations, and provides valid proof for this [
11,
12,
13,
14,
15,
16]. In the past few years, many studies have shown that discrete-time predator-prey systems have more abundant dynamic behaviors than continuous systems, such as bifurcation and chaos. They have obtained the relevant dynamic behaviors among populations through numerical simulation [
17,
18,
19,
20,
21,
22,
23,
24].
Joydip-Dhar et al. [
18] studied the following discrete-time prey-predator model with crowding effect and predator partially dependent on prey:
where
and
denote the intrinsic growth rates of prey
u and predator
v populations, respectively,
a relates to the growth rate of predator as a result of alternative resources,
b indicates competition between individuals due to overcrowding of predator species (i.e., intraspecific interaction),
c is the semisaturation constant,
d indicates the conversion rate for predator,
k is environmental carrying capacity for
u, and
is the step size.
On the basis of system (1), we introduce the capture rate of predator and prey, and consider the following predator-prey system:
where
denote the capture rates of prey and predator, respectively. At the same time, all parameters are greater than zero.
The remainder of the thesis is arranged as follows: In
Section 2, the existence and stability of the equilibrium points in interior of
are given. In
Section 3, we get the relevant conditions of Hopf bifurcation and flip bifurcation through theoretical analysis. In
Section 4, we verify the theoretical results in
Section 3 by numerical simulation, and analyze the chaotic phenomenon of discrete system (2). The last section gives a brief conclusion.
2. The Existence and Stability of Fixed Points
In this section, we study the existence and stability of the fixed points by the eigenvalues for the Jacobian matrix corresponding to system (2).
In order to obtain the fixed points of system (2), we calculate the following equations:
Through simple calculation, the following results can be obtained directly:
Proposition 1. For all parameter values, (2) has a fixed point ;
If , then (2) has a boundary equilibrium point ;
If , then (2) has a boundary equilibrium point ;
If , then (2) has a unique positive fixed point , where is the only positive solution to the cubic equation of one variabiewhere .
The fixed points of system (2) are
and
, where
satisfy
The Jacobian matrix corresponding to system (2) at the fixed point
is as follows
The characteristic equation of the Jacobian matrix can be written as
where
Let and be two roots of (5), which called eigenvalues of the fixed point . The fixed point is called a sink if and , the sink is locally asymptotically stable. The fixed point is a source if and , the source is locally unstable. If either or , then the fixed point is non-hyperbolic. The fixed point is a saddle if and ( or and
Proposition 2. The fixed point is a saddle if ; is a source if ; and is non-hyperbolic if
Proof. For the fixed point
, there is
The two eigenvalues of the matrix are and . Apparently is greater than 1. When , then . Thus, is a saddle. On the other side, when , then , is a source. When , then , is non-hyperbolic. This completes the proof. □
Proposition 3. System (2) has the following propositions at the boundary equilibrium point .
is saddle for all values of parameters except those values which lies in (i)–(iii).
Proof. (i) For the fixed point
, there is
The two eigenvalues of the matrix are and . is sink if and only if and .
When , then , where . When , then . In conclusion, is sink if and We can prove (ii), (iii) and (iv) by the same way. This completes the proof. □
Lemma 1 ([18]).Let Suppose that , and are roots of . Then the following results hold true:
Through calculation, we can obtain the characteristic equation of system (2) at the positive equilibrium point
where
Using Lemma 1, we have the following proposition:
Proposition 4. System (2) has the following propositions at the positive equilibrium point .
:
:
:
is saddle for all values of parameters except those values which lies in (i) to (iii).
Proof. (i) According to Lemma 1, is a sink point if and only if and , it can be obtained by following calculation.
When , then and when , then Therefore, Proposition 4 (i) holds. Similarly, Proposition 4 (ii), (iii) and (iv) can be established. □
Through the above analysis, we can get that when the parameters change on sets
and
, system (2) will have flip bifurcation at the positive equilibrium point
, where
When the parameters change on set
, system (2) will have Hopf bifurcation at the positive equilibrium point
, where
4. Numerical Simulations
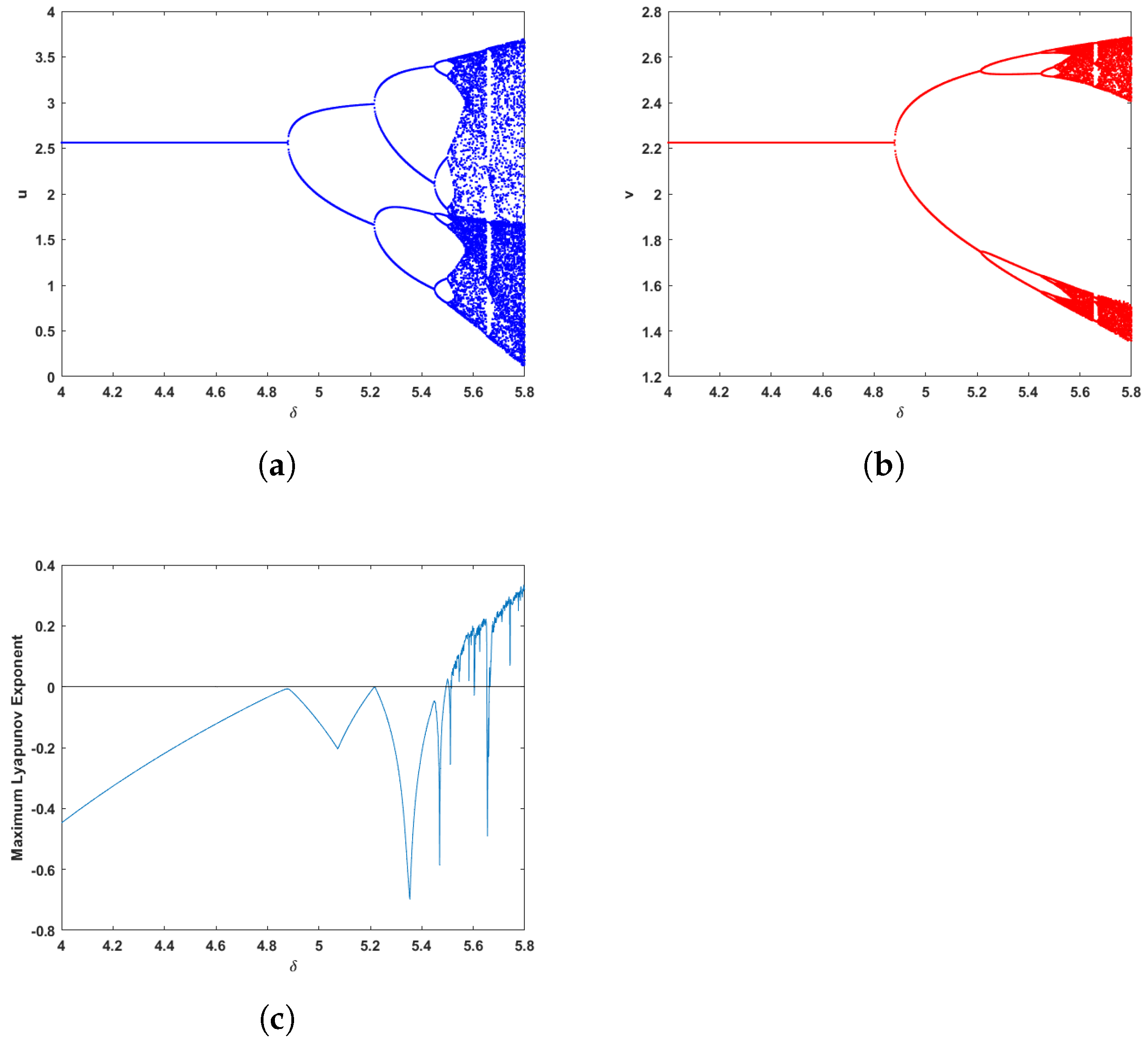
In this section, we will verify the previous theoretical results through numerical simulation. By drawing bifurcation diagram, phase diagram and maximum Lyapunov exponent diagram, the dynamic behavior of discrete system (2) is analyzed and summarized. The bifurcation behavior of system (2) is considered in the following cases:
Firstly, in
Figure 1, we consider that the capture rates of prey and predator
and take
as the bifurcation parameter to analyze the dynamic behavior of system (2) at the positive equilibrium point. We consider the parameter values as
with the initial value of
= (3, 2) and
[4, 5.8]. A flip bifurcation (period-doubling bifurcation) emerges from the fixed point (2.56155, 2.22462) at
and it is stable when
, and when
, system (2) oscillates with periods of
It can be obtained from
Figure 1c that chaos will occur in system (2) as the bifurcation parameters
continue to increase.
In
Figure 2, we consider that the capture rates of prey and predator
, respectively. Taking
with the initial value of
= (3, 2) and
[5, 6.2]. Hopf bifurcation emerges from the fixed point (3.36948, 1.7510) at
with
= −0.9308,
= 0.3656. It verifies that Theorem 2 holds.
In
Figure 3, we can observe that the equilibrium point (3.36948, 1.7510) of system (2) is stable for
, loses its stability at
and not only a limit cycle but also periodic solution appear when the bifurcation parameter
. Furthermore, the value of the maximum Lyapunov exponents related to system (2) is greater than 0 as
continues to increase, and thus chaos will occur, i.e., the solution of system (2) is arbitrarily periodic. At the same time, if only the predator is properly captured, its population density decreases, and the prey population density increases. Compared with
Figure 1, the bifurcation at the positive equilibrium point also changes from flip bifurcation to Hopf bifurcation.
In
Figure 4, we consider that the capture rates of prey and predator
, respectively. Taking
with the initial value of
= (3, 2) and
[4, 6.5]. A flip bifurcation (period-doubling bifurcation) emerges from the equilibrium point (1.6013, 2.1779) at
and it is stable when
and when
, system (2) oscillates with periods of
It can be obtained from
Figure 4b that chaos will occur in system (2) as the bifurcation parameters
continue to increase. At the same time, if only the prey is properly captured, its population density decreases, and the predator population density decreases. Compared with
Figure 1, the bifurcation at the positive equilibrium point does not change.
In
Figure 5, we consider that the capture rates of prey and predator
, respectively. Taking
with the initial value of
= (3, 2) and
[6.4, 7.4]. Hopf bifurcation emerges from the fixed point (2.4372, 1.7197) at
with
= −0.3751,
= 0.2329.
In
Figure 6, we can observe that the equilibrium point (2.4372, 1.7197) of system (2) is stable for
, loses its stability at
and not only an invariant circle but also periodic solution appear when the bifurcation parameter
. The phase diagrams in
Figure 6 indicate that a smooth limit cycle bifurcates from the positive equilibrium point and its radius increases as
increases. When
, system (2) changes from flip bifurcation to Hopf bifurcation, and will produce chaos as
increases. Furthermore, when
, system (2) will occur not only Hopf bifurcation and chaos, but also the equilibrium point be lowered. Compared with
Figure 1, the bifurcation at the positive equilibrium point also changes from flip bifurcation to Hopf bifurcation. So it can be concluded that the capture effect has a great effect on the dynamic behavior of system (2).
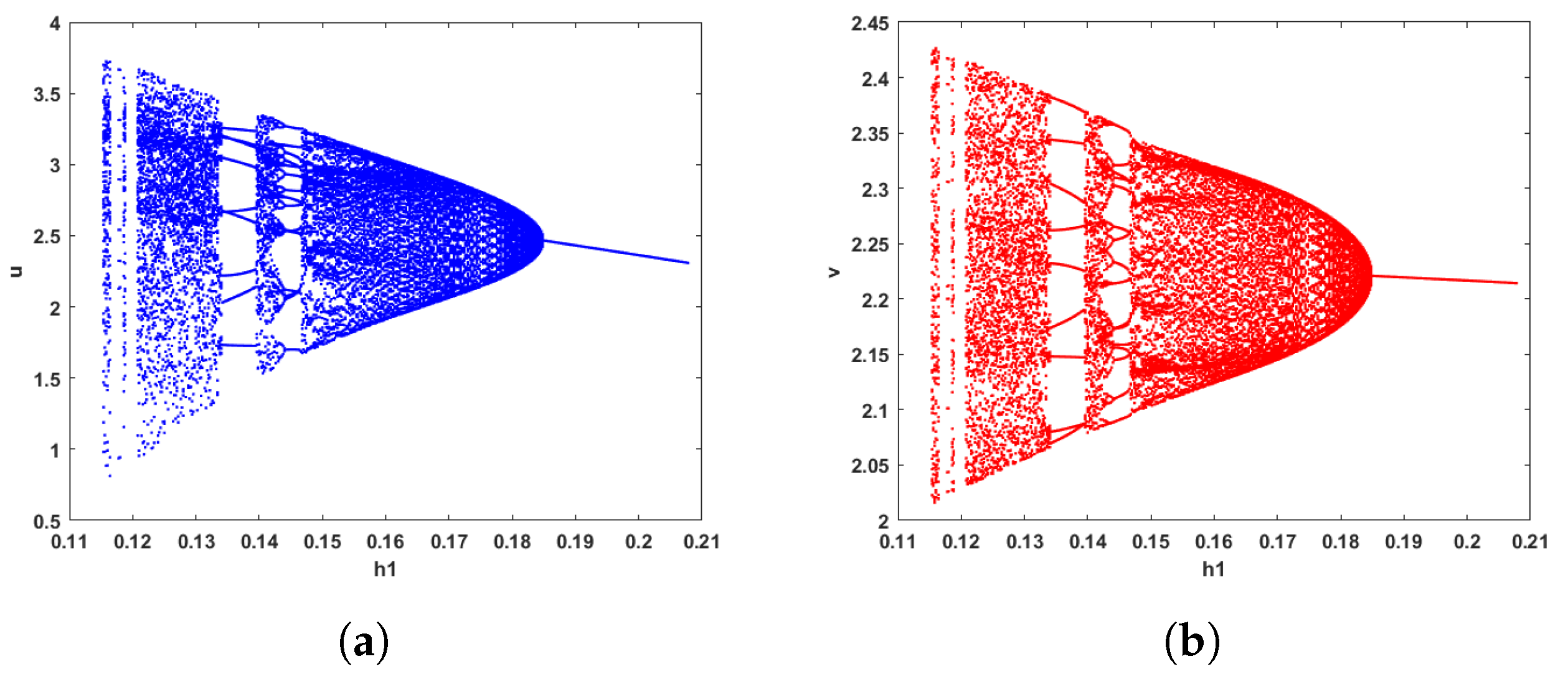
In
Figure 7, when the parameter value is
= (1.15, 0.8, 0.4, 0.2, 2, 0.1, 5, 4.88, 0) with the initial value of
= (4, 2) and
[0.11, 0.21],
is bifurcation parameter.
Figure 7 shows the occurrence of Hopf bifurcation, the bifurcation graph fist appears chaos, then orbital lines and periodic solutions, and finally tends to be stable as the value of parameter
increases. In addition, the population density of prey and predator will decrease with the increasing of prey capture rate
.
In
Figure 8, when the parameter value is
= (0.8, 0.8, 0.4, 0.2, 2, 0.1, 5, 4.88, 0) with the initial value of
= (4, 2) and
[0, 0.25],
is bifurcation parameter. It can be seen from
Figure 8 that as the parameter value
continues to increase, the flip bifurcation will occur. In addition, the population density of prey and predator will increase and decrease with the increasing of predator capture rate
.
5. Conclusions
Research indicates that the discrete systems compared to the continuous systems have richer and more complex dynamic behaviors. Therefore, on the basis of previous study work, this paper studies the stability and bifurcation analysis of a class of discrete-time dynamical system with capture rate in the closed first quadrant . According to the research results, we can obtain the following results:
(1) System (2) has four fixed points, in which the stable fixed point is positive, reflecting the stable coexistence of prey and predators.
(2) System (2) has flip bifurcation at the boundary equilibrium point, flip bifurcation and Hopf bifurcation occur at the positive equilibrium point when
changes in
or
and
small fields. It can be seen from
Figure 1 and
Figure 2 that the flip bifurcation and Hopf bifurcation at the positive equilibrium point will produce chaos. We can also find the orbits of periods 2, 4, and 8 periodic windows of flip bifurcation.
(3) When
, the equilibrium point of system (2) changes compared to system (1), where
goes up and
goes down. The number of predators goes up and the number of prey goes up. In addition, under the same set of parameters, flip bifurcation occurs in system (1) and Hopf bifurcation occurs in system (2), thus the bifurcation phenomenon changes (see
Figure 1 and
Figure 2).
(4) When
, the equilibrium point of system (2) changes compared to system (1), where
and
both go down. The number of predators and prey go down. In addition, under the same set of parameters, the bifurcation of system (2) at the positive equilibrium point does not change compared to system (1) (see
Figure 1 and
Figure 4).
(5) When
, the equilibrium point of system (2) changes compared to system (1), where
and
both go down. The density of both predators and prey populations decreased. In addition, under the same set of parameters, the bifurcation of system (2) at the positive equilibrium point change from flip bifurcation to Hopf bifurcation compared to system (1) (see
Figure 1 and
Figure 5).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}