Abstract
Using the membrane analogy, in 1934 Timoshenko derived the torsional rigidity of a rectangular prism of isotropic material as a function of its material shear modulus, width and thickness. However, he did not consider the energy conservation criterion, as it could be either unnecessary or replaced by other criteria in Timoshenko’s process. To confirm the correctness of Timoshenko’s solution, this work re-derives the torsional rigidity by considering all the equilibrium conditions, boundary conditions, symmetric and anti-symmetric conditions of displacement and stress, the energy conservation criterion, and even the energy minimization criterion. Using the TSAI technique, exact solutions for the displacements, strains, stresses and the torsional rigidity are derived perfectly. The derived torsional rigidity is in a completely different form from that derived by Timoshenko and is numerically identical. Interestingly, the solutions derived in this work verify that, when the values of the width and thickness of the rectangular prism are swapped, the value of the torsional rigidity remains the same, which makes perfect sense physically but is not discussed in Timoshenko’s process or any other research. This work presents a procedure considering all the mathematical details and the results remain correct when the width and thickness of the prism swap. This fact makes perfect sense physically, though has never been expounded before in Timoshenko’s or other researchers’ solutions, either for torsional rigidity or for the induced shear stresses and displacements.
MSC:
74G65; 74-05; 74B05
1. Introduction
The torsional rigidity of a round bar is easily derived and is introduced in every textbook on the mechanics of materials [1]. Zhang, etc., solved the stresses and displacements of a rectangular box under torsion [2]. Teirmoori, etc., solved the displacements of bars under torsion with rectangular cross section and effective coating layers [3]. Allam, etc., derived the shear stresses of a composite, viscoelastic prismatic bar under torsion [4]. Rychlewski derived the plastic torsion of a rectangular bar under torsion [5].
However, deriving the torsional rigidity of a rectangular prism is much more complicated. Timoshenko first published his derivation of the torsional rigidity for a rectangular prism in 1934 [6]. The solution is in series form and depends on the width and the thickness of the prism and the shear modulus of its material. However, the correctness of this solution has gone largely unexamined for nearly a century. By using the membrane analogy, Timoshenko derived the torsional rigidity of the rectangular prism of an isotropic material. Energy conservation and minimization criteria were not taken into consideration. It is possible that they were replaced by other criteria in different forms or just ignored. This work tries to clarify the details of Timoshenko’s initial process by using a different approach, the TSAI technique [7], and considers all equilibrium conditions, stress boundary conditions, stress symmetric or anti-symmetric conditions, displacement symmetric or anti-symmetric conditions, the energy conservation criterion and even the energy minimization criterion [8,9]. The displacements, strains, stresses and torsional rigidity are all mathematically derived. Notably, torsional rigidity takes a completely different form from that derived by Timoshenko. Surprisingly, when the values of the parameters, including width, thickness and shear modulus, are included in the function, the calculated torsional rigidity is exactly the same as that from Timoshenko’s solution for almost any aspect ratio. This means that the torsional rigidity derived herein is different from Timoshenko’s in appearance, but identical numerically.
In addition, by observing the derived rigidity, swapping the values of the width and the thickness of the prism, the value of the rigidity remains the same. In a real case, the definitions of the width and the thickness of a rectangular prism of isotropic material can be swapped, and the calculated torsional rigidity should not be different. This fact makes perfect sense physically, has not been previously mentioned by Timoshenko or others, and is referred to by the authors as the “rule of swapping”.
Based on all the reviews above, the mathematical process includes the details of symmetric and anti-symmetric conditions of displacements (Section 2.1), assumption of displacements (Section 2.2), derivation of strains and stresses (Section 2.3), equilibrium conditions for stresses (Section 2.4), stresses and their boundary conditions (Section 2.5), deriving exact solutions of displacement (Section 2.6), equilibrium for external torsion (Section 2.7), energy conservation criterion (Section 2.8) and energy minimization criterion (Section 2.9). The torsional rigidity and normalized shear stresses are presented in Section 3. The torsional rigidity is compared with that derived by Timoshenko, and the rule of swapping is discussed in Section 4. Conclusions are summarized in Section 5.
2. Problem Description and Solution Derivation
In a three-dimensional Cartesian coordinate system, the origin of the coordinate system is located at the center of a prism, which is an isotropic rectangular prism under torsion (Figure 1a), and its torsional rigidity is to be derived. This arrangement is different from that made by Timoshenko, and clearly reveals the symmetric and anti-symmetric conditions of displacements and stresses of every free body in the prism under torsion.
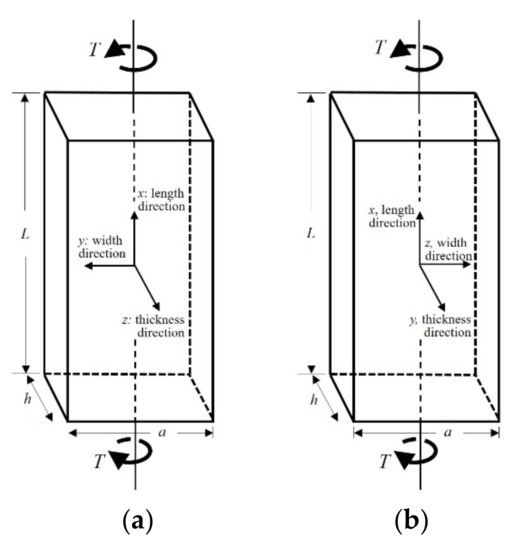
Figure 1.
An isotropic rectangular prism under torsion and a 3-D Cartesian coordinate system (a) with y in the width direction and z in the thickness direction of the prism; (b) with y in the thickness direction and z in the width direction of the prism.
2.1. Symmetric and Anti-Symmetric Conditions of Displacements
The x, y and z-directions are, respectively, the length, width, and thickness of the prism (Figure 1a). The displacement in the x-direction should be symmetric with respect to x and anti-symmetric with respect to y and z. Displacement in the y-direction should be symmetric with respect to y and anti-symmetric with respect to x and z. Displacement in the z-direction should be symmetric with respect to z and anti-symmetric with respect to x and y.
2.2. Assumption of Displacements
A set of assumptions is made for the displacements in the x, y and z directions of every free body in the prism, which is an extension of the Saint-Venant assumption [6].
where uy is an anti-sym. function of y, uz is an anti-sym. function of z, vz is an anti-sym. function of z, wy is an anti-sym. function of y and T is the applied torsion.
2.3. Strains and Stresses
The normal strains and normal stresses are then all zeros.
where
where E is Young’s modulus, and is the Poisson ratio of the material. The shear strains, shear stresses and their boundary conditions are:
where G is the shear modulus of the material, a is the width, and h is the thickness of the prism (Figure 1a).
2.4. Equilibrium Conditions and Displacements
Based on Equations (1a–c), (3a–c) and (6a–c), the equilibrium conditions are
Based on Equation (7b) and the anti-symmetric condition for , , where is a constant. Based on Equation (1b), . Based on Equation (7c) and the anti-symmetric condition for , , where is another constant. Based on Equation (1c), . and become exactly the same as the Saint-Venant [6] assumption. To satisfy the boundary conditions of Equations (6a–c), apply the Two Side Anti-symmetric Images technique, the TSAI technique [7], and express of Equation (1b) and of Equation (1c) in the range −a/2 < y < a/2 and −h/2 < z < h/2 as series of trigonometric functions.
2.5. Shear Stresses and Their Boundary Conditions
The shear stresses, , and of Equations (6a–6c), become:
Equation (9b) shows that the boundary condition of Equation (6b) is satisfied automatically. To satisfy the boundary conditions of Equation (6a,6c), and in Equations (9a,9c) for and are derived as:
2.6. Displacements and Shear Stresses
To fit the boundary conditions of Equations (10) and (11), two types of solutions for in Equation (7a) are found. They are and . Let the general solution of u be the linear combination of the two.
where and are constants. To satisfy Equations (10) and (11), let
As a result
Equation (9a) becomes:
Equation (9c) becomes:
Based on the TSAI technique, the shear stresses are derived properly to satisfy all the boundary conditions, symmetric and anti-symmetric conditions and equilibrium conditions.
2.7. Torsion Equilibrium Condition
Based on Figure 1a, the torsion equals to
Define the aspect ratio h/a as
Equation (17) leads to
Let
Equation (19) becomes
Interestingly, and are numerically identical for aspect ratio c in the range between 0.01 to 100 (Figure 2).
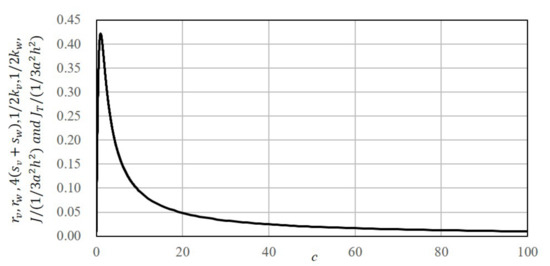
Figure 2.
and verse aspect ratio c, c = h/a.
2.8. Energy Conservation Criterion
The work carried out by the torsion, , equals the strain energy, .
where Φ is the angle of twist, and L is the length of the prism.
Let
Equation (22) becomes
Notably, when h and a swap, the values of and swap, meaning that remains the same. Surprisingly, and (or ) are found to be numerically identical for aspect ratio c in the range from 0.01 to 100 (Figure 2)!
2.9. Energy Minimization
Unlike Timoshenko’s process [6], this work considers the energy minimization. From Equation (20),
To minimize the strain energy, let . From Equation (25),
Based on Equation (26), derive from Equation (27).
Based on Equation (28), derive from Equation (26).
Surprisingly, , , and are numerically identical for aspect ratio c in the range from 0.01 to 100 (Figure 2). As a result, and are numerically identical for the same range of c.
3. Results
From Equations (21) and (25),
Define as the unit twist angle, .
From Equations (28), (29) and (31),
where is the polar moment inertia of the prism for torsion. is defined as the normalized polar moment inertia for torsion (Figure 2). In Equation (32), torsional rigidity is defined as the .
From Equations (15) and (16),
When c = 0.05, 0.2, 1, 5 and 20, of Equation (33a) is calculated and shown in Figure 3a–e, and of Equation (34a) is calculated and shown in Figure 4a–e.
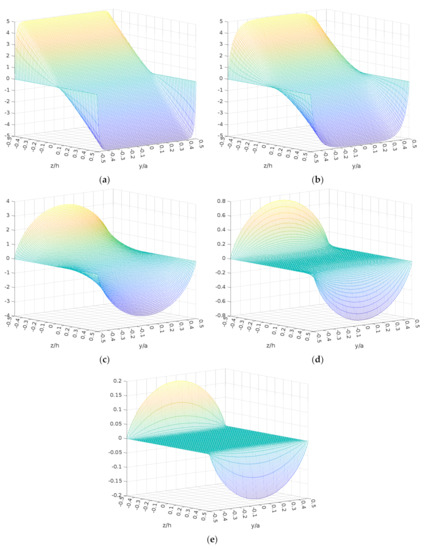
Figure 3.
verse y/a and z/h (a) c = 0.05; (b) c = 0.2; (c) c = 1; (d) c = 5; (e) c = 20.
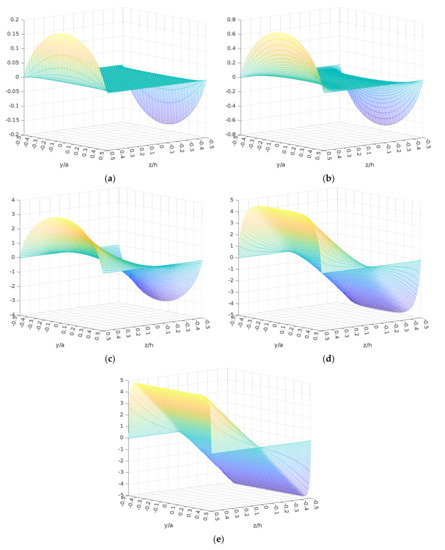
Figure 4.
verse y/a and z/h (a) c = 0.05; (b) c = 0.2; (c) c = 1; (d) c = 5; (e) c = 20.
4. Discussion
In this work, , , , and are all numerically identical. Proving that , , and are mathematically identical is a pure mathematical problem and not in the scope of this work. If , , and are assumed to be identical, Equations (28) and (29) lead to (Figure 2)
or
The polar moment inertia for torsion of Equation (32) and the normalized one of Equation (32a) becomes
The torsional rigidity is .
The polar moment inertia for torsion derived by Timoshenko [6] is
The torsional rigidity is then . Astonishingly, the normalized polar moment inertia for torsion derived by Timoshenko, , equals of Equation (19a) when c is in the range 0.01 to 100 (Figure 2), which cannot be attributed to coincidence. The polar moment inertia for torsion derived in this work, Equation (36), is numerically identical with that derived by Timoshenko, Equation (37) (Figure 2), meaning that the torsional rigidity derived in this work is numerically identical to that derived by Timoshenko.
By just observing the solution of the polar moment inertia for torsion, Equation (32), or the torsional rigidity of this work, when the values of the width and the thickness swap, the value of the inertia and the rigidity remain the same for an arbitrary c. This means that the width and thickness of the prism can be defined in either way (Figure 1b), which makes perfect sense physically. The authors call this the “rule of swapping”, and it should fit Timoshenko’s solution too, either for the polar moment inertia for torsion or the torsional rigidity for an arbitrary c, meaning that
or
However, no mathematical proof can be found to verify Equation (38a). The authors name Equation (38a) as “Timoshenko’s puzzle” in memory of S. P. Timoshenko. “Timoshenko’s puzzle” was not mentioned in any other studies. Proving the “rule of swapping” or solving “Timoshenko’s puzzle” is a pure mathematical problem and not in the scope of this work.
5. Conclusions
Timoshenko derived the torsional rigidity of a rectangular prism made of an isotropic material by using a membrane analogy and the Saint-Venant assumption. This work applies a completely different approach, the TSAI technique, while considering the equilibrium conditions, boundary conditions, symmetric or anti-symmetric conditions, the energy conservation criterion and even the energy minimization criterion. A similar process is also presented in other works [10,11]. This work technically sets the coordinate right at the center of the prism to clearly present the symmetric and anti-symmetric conditions of the displacements and stresses. Assumptions of displacements are made which are more general than the Saint-Venant assumption.
Via the mathematic process, the functional solutions for the polar moment inertia for torsion and the torsional rigidity are derived to satisfy the “rule of swapping” and are in completely different form from those derived by Timoshenko, but are numerically identical for an aspect ratio in the range from 0.01 to 100. The “rule of swapping” is numerically correct for Timoshenko’s solution, but a mathematical proof is lacking, hence why it is known as “Timoshenko’s puzzle”. Solving Timoshenko’s puzzle mathematically is an attractive challenge for any researcher in the future.
Author Contributions
Conceptualization, C.-L.T.; Validation, Formal Analysis and Writing—Review and Editing, C.-L.T. and C.-H.W.; Resources, S.-F.H., W.-T.C. and C.-Y.C.; Writing—Original Draft Preparation, C.-Y.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Timoshenko, S.P.; Gere, J.M. Mechanics of Materials; Litton Educational Publishing, Inc.: Taipei, Taiwan, 1972. [Google Scholar]
- Zhang, Y.-S.; Zhang, X. Analytical Solution of Restrained Torsional Stresses and Displacement for Rectangular-Section Box Bar with Hontycomb Core. Appl. Math. Mech. 2004, 25, 779–785. [Google Scholar]
- Teimoori, H.; Faal, R.T.; Das, R. Saint-Venant Torsion Analysis of Bars with Rectangular Cross-Section and Effective Coating Layers. Appl. Math. Mech. 2016, 37, 237–252. [Google Scholar] [CrossRef]
- Allam, M.N.M.; Ghaleb, A.F. Torsion of a Composite, Viscoelastic Prismatic Bar of Rectangular Cross-Section. Appl. Math. Model. 1982, 6, 197–201. [Google Scholar] [CrossRef]
- Rychlewski, J. Plastic Torsion of a Rectangular Bar with Jump Non-Homogeneity. Int. J. Solids Struct. 1965, 1, 243–255. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Goodier, J.N. Theory of Elasticity, 3rd ed.; McGraw-Hill Inc.: New York, NY, USA, 1951. [Google Scholar]
- Chang, T.-W.; Wang, C.H.; Tsai, C.-L. Advancing Boundary Model for Moisture Diffusion in A Composite Laminate. J. Compos. Mater. 2008, 42, 957–974. [Google Scholar] [CrossRef]
- Tsai, C.-L.; Wang, C.-H.; Hwang, S.-F.; Chen, J.-L. Deformation of an anisotropic Bar under Torsion. In Proceedings of the 45th National Conference on Theoretical and Applied Mechanics, New Taipei, Taiwan, 18–19 November 2021; Available online: http://ctam2021.conf.tw/site/mypage.aspx?pid=34&lang=en&sid=1393 (accessed on 18 November 2021).
- Chen, J.-L. Deformation of an Anisotropic Bar under Torsion. Ph.D. Thesis, National Yun-Lin University of Science & Technology, Yun-Lin, Taiwan, 2022. Available online: https://hdl.handle.net/11296/26728b (accessed on 1 February 2022).
- Mohamed, I.A.O.; Samia, S.; Marin, M. A novel model of plane waves of two-temperature fiber-reinforced thermoelastic medium under the effect of gravity with three-phase-lag model. Int. J. Numer. Methods Heat Fluid Flow 2019, 29, 4788–4806. [Google Scholar]
- Groza, G.; Mitu, A.-M.; Pop, N.; Sireteanu, T. Transverse Vibrations Analysis of a Beam with Gegrading Hysteretic Behavior by Using Euler-Bernoulli Beam Model. An. Univ. Ovidius Constanta-Ser. Mat. 2018, 26, 125–139. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).