Abstract
-regularization methodologies have appeared recently in many pattern recognition and image processing tasks frequently connected to -optimization in the control theory. We consider the problem of optimal stabilizing controller synthesis for a discrete non-minimum phase dynamic plant described by a linear difference equation with an additive unknown-but-bounded noise. Under considering the “worst” case of noise, the solving of these optimization problem has a combinatorial complexity. The choosing of an appropriate sufficiently high sampling rate allows to achieve an arbitrarily small level of suboptimality using a noncombinatorial algorithm. In this paper, we suggest to use fractional delays to achieve a small level of suboptimality without increasing the sampling rate so much. We propose an approximation of the fractional lag with a combination of rounding and a first-order fractional lag filter. The suggested approximation of the fractional delay is illustrated via a simulation example with a non-minimum phase second-order plant. The proposed methodology appears to be suitable to be used in various pattern recognition approaches.
1. Introduction
Many kinds of modeling problems can be represented as
where is a linear operator acting in a Hilbert space, and , and are appropriate vectors.
After discretizing with sampling rate , this equation can be re-written as
The case of with dimensionality often arises in practice when unknown physical characteristics described by cannot be measured directly, but is observed. Matrix is an observation scheme matrix. The interesting case is . It is a conventional ill-posed problem admitting perhaps an infinite number of solutions and is frequently resolved by a regularization method resting upon some preliminary information with the aim to discover a suitable .
One of the widely used regularization methods is -minimization of the value, which is a typical situation in pattern recognition and signal processing operating with the compressive sensing (CS) methodology.
CS was introduced by Candens, Romberg and Tao [1] in 2006. This approach theoretically guarantees a precise recovery of s-sparse signal based on measurements sampled below the Nyquist rate. CS and its applications are reviewed in detail in [2]. CS is commonly used in such areas as super-resolution imaging [3,4,5], MRI fast image acquisition [6,7,8], and seismic data compression [9,10,11]. A signal possesses in these fields natural s-sparse representation corresponding to a specific domain, and the resultant regularized solutions of (1) with the minimal norm leads to sufficiently correct outcomes.
As it can be seen, the task of finding a s-sparse solution is widely used in various applications. To formulate the overall problem, let us introduce , the vector containing indices of the required nonzero elements of and , a vector containing the matching elements. Let denote the restriction of operator to subspace . Then, (1) is rewritten as
This much simpler relationship treats vectors of much smaller dimensionality because , and it can be efficiently solved by standard techniques, such as LU or QR decomposition. Compared to the original problem, this system is not underdetermined. In the case of an invertible operator and , is expressed as
So, the task of finding an s-sparse solution can be reformulated as an optimization problem: to find such corresponding to a minimal norm of such that
Suppose that is not a vector containing integers, but a real-valued vector. In this case, a necessary condition for points where the gradient exists is
where ∇ is the gradient operator. If the corresponding minimum point has all integer components, then it is a solution of original problem (3). Otherwise, a suboptimal one can be obtained by rounding the components to nearest integers. It can be shown that the nearest solution with integer components has a suboptimality level of difference between values of (3) at real-valued and rounded solutions (see [12], which is based on [13] or [14]).
A more accurate outcome can be obtained by rounding the minimum to the nearest vector with rational components in the neighborhood and by choosing the sampling rate
where is the least common denominator of coordinates. Further, the required solution is given just by multiplying by the value. As was shown in [15], the fractional solution has a suboptimality level .
In this paper, the idea of a fractional solution is used for the synthesis of a suboptimal stabilizing controller based on filters approximating fractional delay. This work is based on the method described in the paper [13], where the problem of synthesis of an optimal stabilized controller for a discrete non-minimal phase plant under an irregular bounded noise is considered. The result of [13] was applied in [16,17] for solving a SISO plant adaptive optimal control problem under unknown-but-bounded disturbances. The general solution to the problem of stabilizing optimal controller was obtained in [18].
Non-minimal phase systems have zeros or poles of a transfer function with a positive real part. Such schemes are used to describe various processes, such as ship motion control [19], flexible manipulators [20], servomechanism [21,22], continuous stirred tank reactors [23], electronic circuits [24,25], cart inverted pendulum and coupled-tank systems [25], settle time applications [26], and so on. Moreover, similar structures can appear, for example, due to an approximation, such as a Pade approximation to unit delay, of processes described by partial differential equations [27].
The control of a non-minimal phase plant leads to many difficulties [28]. More precisely, these limitations can be concluded, for example, from the classical root-locus method [29], waterbed effect phenomena [30], and the LTR problem [31]. In linear time-invariant systems, the source of all of the limitations mentioned above is that the non-minimum phase zero of the given process cannot be annulled by the unstable controller pole since such a cancellation causes internal instability [32].
Another generalization of the minimal phase integer order systems consists of the fractional order systems used mainly to describe viscoelasticity/damping [33], electrochemical processes and flexible robots [34].
Automatic control algorithms, based on the concepts of fractional calculus, have been proposed both in the frequency [35] and in the time [36] domains. In [37], fractional order PID controller was proposed. The synthesis of linear quadratic regulator (LQR) based on fractional order PID controllers was suggested in [38,39,40]. A task of tuning of fractional order PID controllers was considered in [41]. Ref. [42] was based on a fractional order controller for compensating the unstable zeros. Various modifications of fractional-order controllers for controlling non-minimum phase systems was discussed in [43,44]. A comprehensive overview of fractional order control, fractional PID controllers, and fractional order calculus application for MIMO plants was described in [45,46,47,48] . The fundamental methods of fractional control were described in [49,50,51,52]. It is worth noting that fractional order controllers in published papers are proposed only for the deterministic continuous case.
This paper’s main contribution consists of a new implementation of a suboptimal controller based on filters approximating fractional delay. The problem of synthesizing an optimal stabilizing controller under conditions of arbitrary bounded noise is investigated. The results of [12] serve as a basis for creating an suboptimal stabilizing control regulator with fractional delays for discrete non-minimal phase systems with bounded noise. But with an arbitrary fixed sampling rate for the dynamical system underlying the processes under study, it is impossible to achieve an arbitrarily small level of suboptimality. For a suboptimal solution, an algorithm for the synthesis of a fractional controller (with non-integer delay) is proposed and justified. We show that the use of fractional lag controllers allows to achieve the control aim that is closer to the optimal level, and with the help of fractional lag, it is not needed to greatly increase the sampling rate to achieve an arbitrarily small level of suboptimality. An advantage of the proposed approach is also the dimension reduction to the number of unstable zeros of a control plant, which is better compared to the infinite dimension of the original optimization problem.
The paper is organized as follows. Section 2 presents the problem statement and introduction of fractional delay and fractional delay filters for the implementation of fractional delay. Section 3 discusses the approximation errors of the controller. The simulation results are presented in Section 4. Finally, Section 5 concludes this paper.
2. Problem Statement and the Theoretical Framework
The results presented in this section are mostly based on the material stated in [12,15].
2.1. Controller for Continuous Non-Minimum Phase System under Unknown-But- Bounded Disturbance
Let us consider a continuous-time control plant with the input–output transfer function
We assume that the excess of the poles and zeros of the system is equal to unity, the first s zeros of the transfer function are unstable () and the remaining zeros are stable (). Here, stands for the real part of a complex number . Let the poles of the transfer function not coincide with the first s unstable zeros.
We choose a discretization step and study a family of piecewise constant functions defining the control actions varying at time instants . By considering the discretization of the given continuous-time system in the zero approximation (see [21]), we obtain for a sufficiently small value of a discrete system with the transfer function
with the poles and zeros . It is well known that for (see [21]), the poles of the transfer function are approximately related to the poles of by for zeros, these relations are
2.2. Controller for Discrete Non-Minimum Phase Plant under Unknown-But- Bounded Disturbance
Let us consider a discrete dynamic control plant described by the following equation
where
- , , are the output, input, and disturbance signals at time instant t respectively;
- is the backward shift operator: ;
- and are polynomials of ;
It is additionally supposed that , .
A linear stationary regulator carries out the control of a plant with known parameters
where and are polynomials of :
If the characteristic polynomial of the closed-loop system described by Equations (7) and (8)
has no unstable roots (in unit disk), then regulator described by Equation (8) is stabilizing
i.e., output and control are bounded.
Denote by the desired output of the control plant described by Equation (7). The meaningful formulation of the problem is to build the polynomials and , which are guaranteeing Inequality (10)—stabilizing of output and input—and asymptotic bound
with performance index
Let be transfer function of closed-loop system from disturbance to input
So, we have
Equation (12) can be rewritten in the form
due to the arbitrary nature of the disturbance performance index.
Denote and the unstable and stable part of polynomial . So, we have .
Assumption A1.
and are coprime polynomials, and polynomial has s unstable different not zero and not unit roots and does not have unit roots.
In [13] it was shown under Assumption A1 that optimal regulator characteristic polynomial is equal to and optimal polynomial has following structure: , where polynomial has not more s non-zero coefficient (s-sparse structure) and highest possible degree of is bounded and depended on highest of magnitude on non-stable zeros of polynomial .
The following theorem from [12] gives the answer to the question about the achievable quality of control. It allows to reformulate the control problem (11)–(12) as a finite dimension problem, which is similar to (3).
Theorem 1.
Under Assumption A1, the minimum value of the function is a lower bound estimate for minimum value of (12), i.e.
where
If the minimum of the left side of Equation (13) is achieved in point with integer-value components, then the polynomial of the -optimal stabilizing controller can be obtained by the formulas (see [12])
where .
For the general case, in order for the controller to be physically attainable, it is necessary to resolve Equation (13) in the positive integers.
A NP-hard problem of finding this point admits a relaxation consisting of resolving in the real numbers field, followed by rounding to the nearest integer. However, the continuous optimization methods applied here can provide ill-treatment solutions. To avoid such a circumstance, the current paper proposes using fractional delay filters to implement a consistent suboptimal controller.
2.3. Fractional Delay Filters
The ideal fractional delay element is a digital version of a continuous-time delay line
The impulse response of an ideal fractional delay (FD) filter is a shifted and sampled sinc function
where is the delay with an integral part is a rounding of to the nearest integers less than or equal to , and is the fractional part
For case , the impulse response is an infinite length. The impulse response of the ideal fractional delay filter is presented in Figure 1.
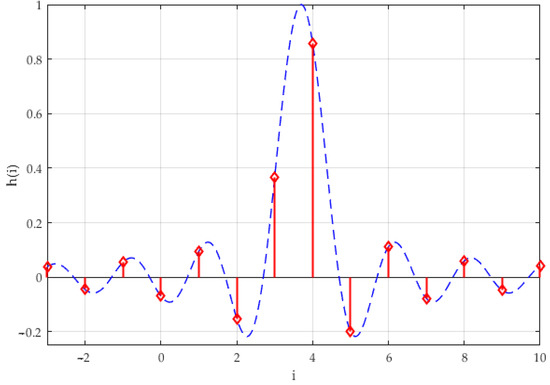
Figure 1.
The impulse response of ideal fractional delay filter.
The infinite length of the impulse response leads to a noncausal filter that cannot be made causal by a finite shift in time. In addition, the filter is not stable since the impulse response is not absolutely summable. Thus, the ideal FD filter is nonrealizable.
The problem of a suboptimal controller is faced with the problem of design s fractional delay filters. To produce a realizable finite-length fractional delay filter, causal approximation for the sinc function can be used [53].
Generally, today, there are a large number of papers deal with the design of filters with fractional delays of both filters with finite impulse response (FIR) [54] and infinite impulse response IIR [55,56].
This article discusses the most straightforward non-recursive first-order filters. These filters are consistently stable [57,58] and somewhat increase the complexity of the synthesized controller. More complex filters should be considered on a case-by-case basis.
3. Approximation Errors of the Controller
The approximation of the fractional delay leads to an additional error in the plants. Let us define this error as , so
This is shown in [59]
where is the condition number.
Equation [23] shows that the approximation error is naturally bounded by an estimator linearly depending on the error . According to the definition of the norm, a decrease in errors of all its elements will lead to a decrease in the total error.
Let us compare the approximation error of the rounding method [12] and the simplest non-recursive fractional delay filter and introduce
Consider the approximation by the example of an unstable zero representing it in the irreducible fraction of an integer and a fractional part .
An approximation of the fractional part by the method of rounding to integer powers is [12]
An approximation of the fractional part for a non-recursive fractional delay filter is
The rounding approximation error is defined as
The error of approximation by the fractional lag filter is defined as
Consider for which values of the parameters and d the approximation error of (26) is less than (25).
Theorem 2.
Proof.
Let us consider two possible cases.
Case 1. . Consider the inequality . After simplification, the inequality takes the form
and it always holds true for the values , .
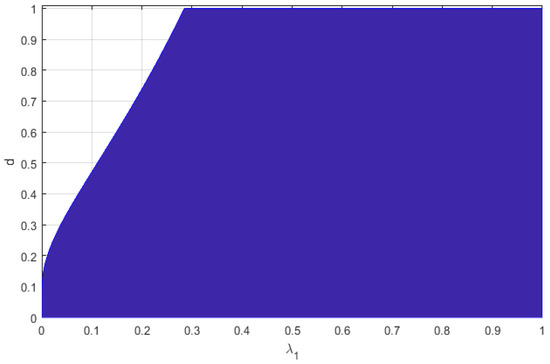
Case 2. . Consider the inequality . After simplification, the inequality takes the form
Figure 2 shows the region (marked in blue) in which inequality (29) is satisfied. As we can see from the figure, this is possible only for the values , .
Figure 2.
Region when Inequality (29) is satisfied.
□
When Inequality (27) is satisfied, an approximation based on a fractional delay filter should be chosen. If Inequality (27) is not satisfied, the approximation is based on rounding. The filter approximating the fractional delay according to this rule can be defined as
An approximation by fractional delay filters of other elements of the matrix is carried out similarly. The use of filters approximating the fractional delay allows to reduce the approximation error of most elements without resorting to increasing the sampling frequency in the controller.
Remark 1.
This approach can be applied to design a controller for a continuous system. The sampling error can be considered as an unknown-but-bounded noise [44].
4. Simulation Results
The class of non-minimum phase plants is described by the equation
where the appropriate vector and matrix are
and .
The controller for the experiment was implemented according to the following steps:
The minimum of function (9) is a function of the values of unstable zeros :
Figure 3 presents the surface of the function (32). It shows the minimum achievable error for different values of unstable zeros.
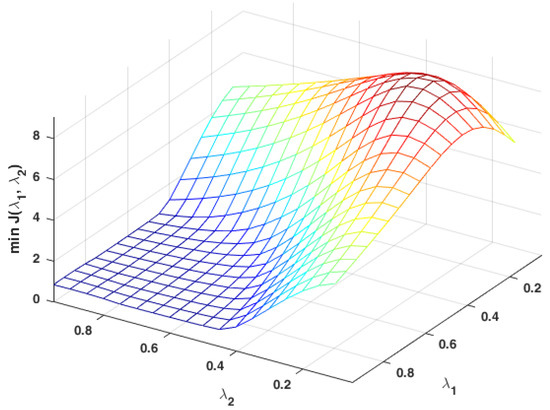
Figure 3.
Function Surface (33), which depicts minimum achievable error for different values of unstable zeros.
Determine the absolute error in the assessment using a suboptimal controller (23)
and controller (30)
The function surface of error (33) is shown on the Figure 4, and the function surface of error (34) is shown on the Figure 5.
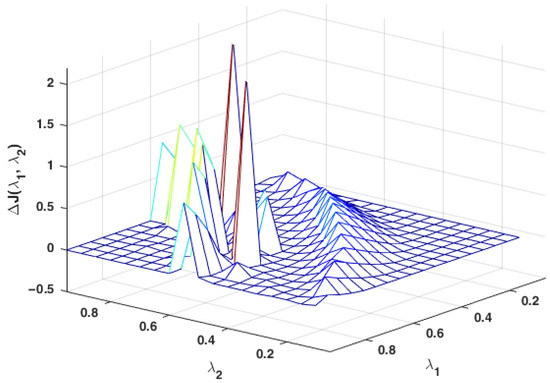
Figure 4.
Function Surface (33), which depicts additional error caused by rounding.
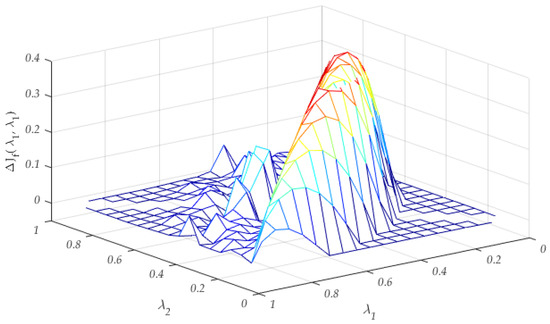
Figure 5.
Function Surface (34), which depicts additional error caused by using of fractional lag filter.
As it can be seen from Figure 5, the error caused by the fractional lag filter is less than the error caused by rounding (Figure 4) for all values of , . The use of a filter approximating fractional delay allows to obtain a more accurate solution compared to a suboptimal controller [12]. The histogram presented on Figure 6 shows that errors of fractional lag filter have a lower variance with maximum value 0.5, compared to Figure 7, where the maximum additional error is greater than 2.
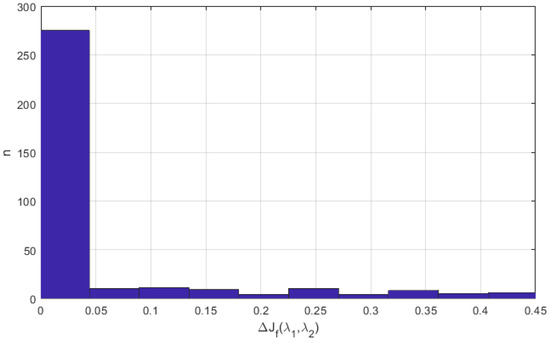
Figure 6.
Histogram of additional errors caused by using of fractional lag filter.
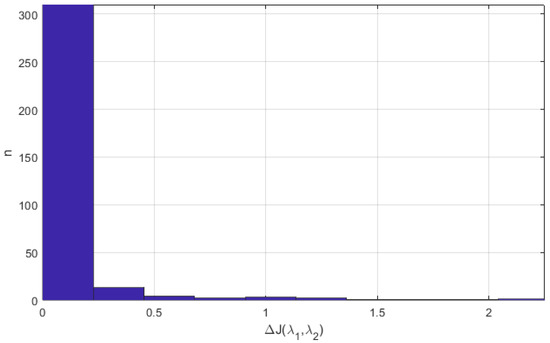
Figure 7.
Histogram of additional errors caused by rounding.
Table 1 shows the mean and standard deviation of additional errors for all . Compared to the rounding method, the mean value and standard deviation of errors caused by the proposed algorithm are smaller.

Table 1.
Mean and standard deviation of additional errors.
For instance, let us compare suboptimality levels for the case when . The rounding method consists of the following steps:
- by definition in Theorem 1;
- ;
- ;
- The minimum value of at the point ;
- The coefficients of the polynomial is found from the system of equationswhere denotes rounding of x to the nearest integer;
- The suboptimality level is calculated as .
The proposed method consists of the following steps:
If a more accurate approximation of the fractional delay filter is necessary, multi-rate signal processing with a higher sampling frequency in the controller can be used, allowing to use a filter of a higher order.
5. Conclusions
The paper proposes a new method of synthesis of a suboptimal stabilizing controller with fractional delays for a discrete non-minimum phase plant described by a linear difference equation with an additive unknown-but-bounded noise. The fractional delays approach is used to achieve a small level of suboptimality without significantly increasing the sampling rate. This approach consists of an approximation of the fractional lag with a combination of rounding and a first-order fractional lag filter. The suggested approximation of the fractional delay is illustrated via a simulation example with a non-minimum phase second-order plant. The results of the simulation shows that the proposed methodology allows to obtain a more accurate solution compared to approximation of the fractional delay by rounding.
The proposed methodology appears to be suitable to be used in various pattern recognition approaches, such as CS. A relationship between the fractional delay control problem and CS remains open and will be investigated in the future.
Author Contributions
Conceptualization, D.I.; investigation, D.I., O.G., Z.V. and V.P. The authors have equally contributed to the writing, editing, and style of the paper. All authors have read and agreed to the published version of the manuscript.
Funding
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors are grateful to the reviewers for constructive and useful comments, which made it possible to significantly improve the presentation of the results obtained.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Candes, E.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef] [Green Version]
- Granichin, O.; Pavlenko, D. Randomization of data acquisition and ℓ1-optimization (recognition with compression). Autom. Remote Control 2010, 71, 2259–2282. [Google Scholar] [CrossRef]
- Pan, Z.; Yu, J.; Huang, H.; Hu, S.; Zhang, A.; Ma, H.; Sun, W. Super-resolution based on compressive sensing and structural self-similarity for remote sensing images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4864–4876. [Google Scholar] [CrossRef]
- Zhang, X.; Li, C.; Meng, Q.; Liu, S.; Zhang, Y.; Wang, J. Infrared image super resolution by combining compressive sensing and deep learning. Sensors 2018, 18, 2587. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, S.; Sun, F.; Wang, M.; Liu, Z.; Jiao, L. Novel super resolution restoration of remote sensing images based on compressive sensing and example patches-aided dictionary learning. In Proceedings of the 2011 International Workshop on Multi-Platform/Multi-Sensor Remote Sensing and Mapping, Xiamen, China, 10–12 January 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–6. [Google Scholar]
- Mardani, M.; Gong, E.; Cheng, J.Y.; Vasanawala, S.S.; Zaharchuk, G.; Xing, L.; Pauly, J.M. Deep generative adversarial neural networks for compressive sensing MRI. IEEE Trans. Med. Imaging 2018, 38, 167–179. [Google Scholar] [CrossRef]
- Zhang, M.; Li, M.; Zhou, J.; Zhu, Y.; Wang, S.; Liang, D.; Chen, Y.; Liu, Q. High-dimensional embedding network derived prior for compressive sensing MRI reconstruction. Med. Image Anal. 2020, 64, 101717. [Google Scholar] [CrossRef]
- Yang, G.; Yu, S.; Dong, H.; Slabaugh, G.; Dragotti, P.; Ye, X.; Liu, F.; Arridge, S.; Keegan, J.; Guo, Y.; et al. DAGAN: Deep De-Aliasing Generative Adversarial Networks for Fast Compressed Sensing MRI Reconstruction. IEEE Trans. Med. Imaging 2017, 37, 1310–1321. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, X.; Zhang, S.; Lin, J.; Sun, F.; Zhu, X.; Yang, Y.; Tong, X.; Yang, H. An efficient seismic data acquisition based on compressed sensing architecture with generative adversarial networks. IEEE Access 2019, 7, 105948–105961. [Google Scholar] [CrossRef]
- Siahkoohi, A.; Kumar, R.; Herrmann, F. Seismic data reconstruction with generative adversarial networks. In Proceedings of the 80th EAGE Conference and Exhibition 2018. European Association of Geoscientists & Engineers, Copenhagen, Denmark, 11–14 June 2018; Volume 2018, pp. 1–5. [Google Scholar]
- Baraniuk, R.G.; Steeghs, P. Compressive sensing: A new approach to seismic data acquisition. Lead. Edge 2017, 36, 642–645. [Google Scholar] [CrossRef]
- Granichin, O. Design of suboptimal controller of the linear object in bounded noise. Autom. Remote Control 1990, 51, 184–187. [Google Scholar]
- Barabanov, A.; Granichin, O. Optimal controller for linear plant with bounded noise. Autom. Remote Control 1984, 45, 578–584. [Google Scholar]
- Dahleh, M.; Pearson, J. L1-optimal feedback controllers for MIMO discrete-time systems. IEEE Trans. Autom. Control 1987, 32, 314–322. [Google Scholar] [CrossRef]
- Granichin, O. Designing the discrete suboptimal controller of the continuous-time object in nonregular bounded noise. Autom. Remote Control 2001, 62, 422–429. [Google Scholar] [CrossRef]
- Amelin, K.; Granichin, O. Randomized control strategies under arbitrary external noise. IEEE Trans. Autom. Control 2016, 61, 1328–1333. [Google Scholar]
- Vakhitov, A.; Vlasov, V.; Granichin, O. Adaptive control of SISO plant with time-varying coefficients based on random test perturbation. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 4004–4009. [Google Scholar] [CrossRef]
- Khammash, M. A new approach to the solution of the ℓ1 control problem: The scaled-Q method. IEEE Trans. Autom. Control. 2000, 45, 180–187. [Google Scholar] [CrossRef] [Green Version]
- Perez, T. Ship Motion Control: Course Keeping and Roll Stabilisation Using Rudder and Fins; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Kwon, D.S.; Book, W. A time-domain inverse dynamic tracking control of a single-link flexible manipulator. J. Dyn. Syst. Meas. Control ASME 1994, 116, 193–200. [Google Scholar] [CrossRef]
- Qiu, L.; Davison, E. Performance limitations of non-minimum phase systems in the servomechanism problem. Automatica 1993, 29, 337–349. [Google Scholar] [CrossRef]
- Jemaa, L.; Davison, E. Performance limitations in the robust servomechanism problem for discrete time periodic systems. Automatica 2003, 39, 1053–1059. [Google Scholar] [CrossRef]
- Kravaris, C.; Daoutidis, P. Nonlinear state feedback control of second-order nonminimum-phase nonlinear systems. Comput. Chem. Eng. 1990, 14, 439–449. [Google Scholar] [CrossRef] [Green Version]
- Gray, P.; Meyer, R. Analysis and Design of Analog Integrated Circuits; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1993. [Google Scholar]
- Rigney, B.; Pao, L.; Lawrence, D. Nonminimum Phase Dynamic Inversion for Settle Time Applications. Control Syst. Technol. 2009, 17, 989–1005. [Google Scholar] [CrossRef] [Green Version]
- Bose, S.; Hote, Y.; Kennedy, R. Nonminimum-phase equalization and its subjective importance in room acoustics. IEEE Trans. Speech Audio Process. 2000, 8, 728–737. [Google Scholar]
- Curtain, R.; Morris, K. Transfer functions of distributed parameter systems: A tutorial. Automatica 2009, 45, 1101–1116. [Google Scholar] [CrossRef]
- Seron, M.; Braslavsky, J.; Goodwin, G. Fundamental Limitations in Filtering and Control; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Hoagg, J.; Bernstein, D. Nonminimum-phase zeros. IEEE Control Syst. Mag. 2007, 27, 45–57. [Google Scholar] [CrossRef]
- Doyle, J.; Francis, B.; Tannenbaum, A. Feedback Control Theory; Macmillan: New York, NY, USA, 1992. [Google Scholar]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Kailath, T. Linear Systems. Englewood Cliffs; Prentice-Hall: Hoboken, NJ, USA, 1980. [Google Scholar]
- Stiassnie, M. On the application of fractional calculus for the formulation of viscoelastic models. Appl. Math. Model. 1979, 3, 300–302. [Google Scholar] [CrossRef]
- Vinagre, B.; Feliu, V. Modeling and control of dynamic system using fractional calculus: Application to electro-chemical processes and flexible structures. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 214–239. [Google Scholar]
- Oustaloup, A. The CRONE control of resonant plants: Application to a flexible transmission. Eur. J. Control 1995, 1, 113–121. [Google Scholar] [CrossRef]
- Machado, J. Analysis and design of fractional order digital control systems. SAMS-J. Syst. Anal. Model. Simul. 1997, 27, 107–122. [Google Scholar]
- Podlubny, I. Fractional-order systems and PID-controllers. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Das, S.; Pan, I.; Halder, K.; Das, S.; Gupta, A. Optimum weight selection based LQR formulation for the design of fractional order PIλDμ controllers to handle a class of fractional order systems. In Proceedings of the Computer Communication and Informatics (ICCCI), Coimbatore, India, 4–6 January 2013; pp. 1–6. [Google Scholar]
- Das, S.; Pan, I.; Halder, K.; Gupta, A. LQR based improved discrete PID controller design via optimum selection of weighting matrices using fractional order integral performance index. Appl. Math. Model. 2013, 37, 4253–4268. [Google Scholar] [CrossRef]
- Das, S.; Pan, I.; Das, S. Multi-objective LQR with optimum weight selection to design FOPID controllers for delayed fractional order processes. ISA Trans. 2015, 58, 35–49. [Google Scholar] [CrossRef] [Green Version]
- Monje, C.A.; Vinagre, B.M.; Feliu, V.; Chen, Y. Tuning and auto-tuning of fractional order controllers for industry applications. Control Eng. Pract. 2008, 16, 798–812. [Google Scholar] [CrossRef] [Green Version]
- Merrikh-Bayat, F. Fractional-order unstable pole-zero cancellation in linear feedback systems. J. Process Control 2013, 23, 817–825. [Google Scholar] [CrossRef]
- Arya, P.; Chakrabarty, S. IMC based fractional order controller design for specific non-minimum phase systems. IFAC-PapersOnLine 2018, 51, 847–852. [Google Scholar] [CrossRef]
- Muresan, C.; Dulf, E.; Copot, C.; Keyser, R.D.; Ionescu, C. Design and analysis of a multivariable fractional order controller for a non-minimum phase system. J. Vib. Control 2016, 22, 2187–2195. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Petras, I.; Xue, D. Fractional order control-a tutorial. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1397–1411. [Google Scholar]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Almeida, A.M.d.; Lenzi, M.K.; Lenzi, E.K. A survey of fractional order calculus applications of multiple-input, multiple-output (MIMO) process control. Fractal Fract. 2020, 4, 22. [Google Scholar] [CrossRef]
- Birs, I.; Muresan, C.; Nascu, I.; Ionescu, C. A survey of recent advances in fractional order control for time delay systems. IEEE Access 2019, 7, 30951–30965. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Baleanu, D.; Machado, J.A.T.; Luo, A.C. Fractional Dynamics and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Eckert, M.; Kupper, M.; Hohmann, S. Functional fractional calculus for system identification of battery cells. Automatisierungstechnik 2014, 62, 272–281. [Google Scholar] [CrossRef]
- Valério, D.; da Costa, J. An Introduction to Fractional Control; Control, Robotics and Sensors Series; Institution of Engineering and Technology: London, UK, 2013. [Google Scholar]
- Valimaki, V.; Laakso, T. Principles of fractional delay filters. In Proceedings of the 2000 IEEE International Conference on Acoustics, Speech, and Signal Processing, Istanbul, Turkey, 5–9 June 2000; pp. 3870–3873. [Google Scholar]
- Farrow, W. A continuously variable digital delay element. In Proceedings of the IEEE International Symposium on Circuits and Systems, Espoo, Finland, 7–9 June 1988; Volume 3, pp. 2641–2645. [Google Scholar]
- Thiran, P. Recursive digital filters with maximally flat group delay. IEEE Trans. Circ. Theory 1971, 18, 659–664. [Google Scholar] [CrossRef] [Green Version]
- Diaz-Carmona, J.; Dolecek, G. Fractional delay digital filters. Appl. MATLAB Sci. Eng. 1996, 1, 247–272. [Google Scholar]
- Williamson, G. Digital Signal Processing Handbook; Madisetti, V.K., Williams, D.B., Eds.; CRC Press LLC.: Boca Raton, FL, USA, 1999. [Google Scholar]
- Mulgrew, B.; Grant, P.; Thompson, J. Finite impulse response digital filters. In Digital Signal Processing; Springer: Berlin/Heidelberg, Germany, 1999; pp. 150–175. [Google Scholar]
- Laakso, T.; Välimäki, V.; Karjalainen, M.; Laine, U. Splitting the unit delay tools for fractional delay filter design. IEEE Signal Process. Mag. 1996, 13, 30–60. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).