Abstract
Small living organisms such as lizards possess naturally built functional surface textures that enable them to walk or climb on versatile surface topographies. Bio-mimicking the surface characteristics of these geckos has enormous potential to improve the accessibility of modern robotics. Therefore, gecko-inspired adhesives have significant industrial applications, including robotic endoscopy, bio-medical cleaning, medical bandage tapes, rock climbing adhesives, tissue adhesives, etc. As a result, synthetic adhesives have been developed by researchers, in addition to dry fibrillary adhesives, elastomeric adhesives, electrostatic adhesives, and thermoplastic adhesives. All these adhesives represent significant contributions towards robotic grippers and gloves, depending on the nature of the application. However, these adhesives often exhibit limitations in the form of fouling, wear, and tear, which restrict their functionalities and load-carrying capabilities in the natural environment. Therefore, it is essential to summarize the state of the art attributes of contemporary studies to extend the ongoing work in this field. This review summarizes different adhesion mechanisms involving gecko-inspired adhesives and attempts to explain the parameters and limitations which have impacts on adhesion. Additionally, different novel adhesive fabrication techniques such as replica molding, 3D direct laser writing, dip transfer processing, fused deposition modeling, and digital light processing are encapsulated.
1. Introduction
Scientific expeditions have identified exceptional properties in living organisms that help them to perform outstanding tasks. Frogs, for instance, have a highly regular toe pad microstructure which facilitates them to stick easily to wet surfaces [1]. Spiders generate a glue-coated thread from their posterior abdomen to capture the prey [2]. On the other hand, geckos, such as lizard geckos and tokay geckos, climb on vertical surfaces without slipping, using their unique toe pads [3]. By gaining insights from the physiological properties of these biological creatures, scientists have developed smart synthetic materials with unique characteristics. The evolution of such synthetic materials has enabled researchers to replicate the surface properties of biological creatures, leading to an interdisciplinary field called biomimetics.
The origin of biomimetics can be dated back to 1950, when it was indicated that designs from biological creatures could be transferred to produce technologies in the form of machines, materials, and novel concepts that would be useful for humans [4]. Among these biological creatures, geckos have inspired researchers to develop synthetic materials over the past two decades. Autumn et al. [5] conducted one of the earliest studies in 2000 which laid the foundation for fabricating different synthetic adhesives inspired by gecko adhesion. Since then, considerable research has been conducted in the field of gecko-based adhesives [6,7,8]. The fabrication process, development, and design of these adhesives have been the primary focus areas for researchers to develop adhesive technology with high load-bearing capabilities and minimal fouling.
Geckos can walk or climb on a plane as well as vertical surfaces without slipping, using a quick attachment and detachment mechanism. The gecko toepad is composed of millions of hair-like structures called setae, which are composed of β keratin protein [9]. The attachment and detachment mechanism of gecko is controlled by the gecko’s foot morphology [10]. Figure 1 shows the hierarchical structure of the gecko’s toepad, consisting of macro-, meso-, and microstructures. The gecko toepads are sticky due to the hierarchical microstructures consisting of high-aspect-ratio lamellar shafts that act as smart adhesives [11]. The adhesive mechanism is actuated through the lamellar shafts, composed of millions of setae. These setae structures enable attractive van der Waal forces which help with adhesion. One setae structure is approximately 100 µm in length and 5 µm in diameter, and the tip of these individual setae branches into 100–1000 nanostructures known as spatulae. When the spatulae come in contact with any surface, they distort to provide a large contact area and generate a molecular contact which converts weak van der Waal forces into enormous attractive forces, sufficient for geckos to climb [12].
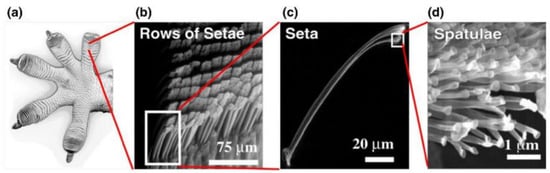
Figure 1.
Hierarchical structure of a gecko toepad: (a) lamellar structures; (b) rows of setae; (c) tip of one single setae; (d) spatulae image. Reprinted with permission from [9]. 2018, Springer.
The hierarchical structure of the gecko toepads enables them to generate a frictional force that helps them carry their body weight during rapid locomotion [13]. It has been observed that adhesion increases with humidity, but the adhesion decreases when the toes are completely immersed in a fluid. Studies have shown that under sultry weather conditions, the adhesive pads of geckos can modify their hydrophobicity to increase their adhesion and control frictional forces [14,15]. Experiments have revealed that the front two feet of a gecko are able to develop frictional forces of around 20 N, and each seta can have a mean shear force of 6.2 N, with a maximum shear force of 194 N [16]. Another important attribute of gecko adhesion is high reversible adhesion and friction. During reverse adhesion, a peeling mechanism makes it possible for the rapid detachment of gecko toes. Theoretical and experimental studies have shown that setae on gecko feet are angled, showing anisotropy features in their adhesion and friction forces when they stick and dislocate in reverse directions [16]. In attachment mode, the setae bend down and stick to the substrate surface so that the toes have high adhesion and friction. Similarly, when in detachment mode, gecko toes peel off the surface where the setae bend back to decrease both adhesion and friction. The friction force between two adhesive surfaces () based on gecko adhesion is given by Equation (1) [16]:
where is normal load, is the coefficient of friction, is the actual contact area, and is the shear strength. The first term, , in the equation defines the friction forces, and the second term, , in the equation represents the adhesion and real contact area. Usually, for gecko adhesion, the friction forces are low compared with the adhesive forces. Equation (1) indicates that the adhesive forces play an important role in defining the friction forces for efficient gecko adhesion. Thus, to realize the application of the gecko adhesion mechanism, it is necessary to study the various adhesives and adhesion mechanisms employed by state-of-the-art gecko-based robots and their corresponding artificial adhesives.
Gecko-inspired adhesives provide relatively (compared with other adhesives) many advantages such as lower power consumption, suitability to a broader range of materials, relatively safer to use, can be scaled with the area, and hence carry higher loads [17]. These adhesives can adapt to surfaces of varying roughness, enhance the contact area, and provide required adhesion. Additionally, these adhesives can be employed in special environments such as space. Some of these adhesives are directional in nature, i.e., they are controllable to be turned on and off as and when required. Due to their anisotropic behavior, some of these adhesives can be disengaged with lower forces for specific applications [18]. The properties mentioned above make gecko-inspired adhesives suitable for various robotic applications, such as wall-climbing robots [19], manipulators [20], and space robots [21], to name a few.
The novelty of this review is that it explains about the importance of both water and humidity on gecko adhesion, in addition to the significance of surface roughness on adhesives. Here, there are many examples cited with novel fabrication techniques for synthetic adhesives. The following sections discuss adhesion mechanisms related to natural geckos, factors affecting them, various adhesion mechanisms upon which gecko-based artificial adhesives are fabricated, and recent progress in this field (Figure 2).
Figure 2.
A brief pictorial representation of the major topics discussed.
2. Adhesion Mechanisms of Some Climbing Robots and Gecko-Inspired Robots
At the prior stage of gecko-inspired robotics research, two types of adhesion mechanisms were commonly used, namely, suction adhesion, and magnetic adhesion. Suction adhesion is one of the oldest adhesion mechanisms, designed for wall-climbing robots. In this mechanism, the robot carries a pump to create a vacuum inside the adhesive cups that can be pressed against any smooth surface [22]. However, this mechanism remains inoperable on porous, cracked, and rough surfaces due to the chances of air leakage [23]. In addition, a considerable amount of time and power was required to produce sufficient vacuum in order to generate realistic adhesion force under the suction mechanism. Therefore, the robot’s locomotion slowed down significantly, which has limited the contemporary use of the suction adhesion mechanism under natural environments [24].
Comparatively, magnetic adhesion is a faster and more efficient mechanism when involving actuators [22]. In this mechanism, a permanent magnet is utilized to assist the robot’s locomotion on any ferromagnetic surface through integrated wheels [25]. Shen et al. [26] fabricated a wall-climbing robot in 2006 based on the magnetic adhesion mechanism. The benefit of this robot model was that it could carry a load of at least 30 kg. Magnetic adhesion mechanisms have also been preferred for nuclear power plant inspection systems [27]. In addition, they can be employed on any ferromagnetic surface. However, the greatest limitation of magnetic adhesion is its inability to operate on nonferromagnetic surfaces, which has greatly limited its usage in advanced applications [23].
Due to the limitations of suction and magnetic adhesion, researchers have explored alternative adhesion mechanisms, such as dry fibrillary adhesion, elastomeric adhesion, electrostatic adhesion, and thermoplastic adhesion, to name a few for gecko-inspired robots. Researchers have been investigating these mechanisms significantly for the last two decades.
In Table 1, a summary of these mechanisms with their applications is presented based on the literature. These mechanisms are discussed in detail in the subsequent sections.

Table 1.
Examples of synthetic adhesives employing different adhesion mechanisms.
2.1. Dry Fibrillary Adhesion
In dry fibrillary adhesion, surfaces can stick to smooth substrates but cannot stick to rough surfaces due to smaller contact areas and higher stress concentrations [48]. However, the flexibility of the fibers on rough surfaces can be enhanced by modifying their aspect ratio. The modified fibers provide enhanced contact area and adhesion, but their tensile strength may be reduced [49]. The improved contact area and adhesion are due to extended fibrils which increase the van der Waals interactions with the surface. In this context, some dry fibrillary gecko-based adhesives were employed historically, which included pressure-sensitive adhesives (PSAs). PSAs have fibrillary structures with a soft flowing layer which generates a large van der Waals attraction force to the surface [50]. Even though PSAs can provide sufficient adhesion to help robots climb efficiently on vertical surfaces [29,30], they require an extra support layer of soft foam for adhesion on rough surfaces [35]. PSAs also require a considerable amount of preload in the normal direction for efficient adhesion and detachment [32]. These factors, in addition to fouling, have limited the usage of PSA for climbing robots [32]. Hence, new adhesives with microstructured geometries (fibrillary structures) needed to be developed. Krahn et al. [28] introduced a novel ‘timing belt-based climbing platform (TBCP) robot’ in 2011, which did not require a preload for climbing vertical or horizontal surfaces. In addition, a fibrillary dry adhesive was developed for this robot with mushroom-shaped caps using polymethyl methacrylate (PMMA) and polydimethylsiloxane (PDMS) for smoother attachment and detachment purposes (Table 1). This robot could easily climb on vertical glass and painted steel surfaces. The robot could also traverse both horizontal and vertical surfaces with a speed of 3.4 cm/s.
Previously, it was discovered that gecko toes could stick to surfaces efficiently despite high bulk material stiffness (almost 2 GPa for β keratin) [11]. This is due to the hierarchy of microstructure consisting of lamellae, setae, and spatulae, which reduces the effective stiffness of the entire gecko footpad structure. Thus, the entire system acts as a tacky material without fouling, and the microstructures further diffuse the load by dividing contact surfaces. Since this discovery, many artificial dry adhesive materials have been fabricated using perpendicular multi-wall carbon nanotubes (CNTs) and polymer fibers. In addition, in order for a material to be considered tacky, its effective modulus should be less than 100 kPa [8,11]. These “tack criteria” are satisfied by PSAs made from viscoelastic materials. Even though these structural materials are non-flexible and hydrophobic, they are delicate and require high normal loads for efficient attachment and detachment. Although CNT- and polymer–fiber-based adhesives sometimes lack anti-fouling properties, they can be manually cleaned and reused. Micro-structured elastomer tapes are an example of such adhesives [29,31]. The contrasting features of adhesives prepared from polymers and CNTs are presented in Table 2.
Table 2.
Contrasting features of polymer-based adhesives and CNT adhesives [51].
In addition to the effective stiffness and the effective modulus of adhesive microstructures, the size and form of contacting elements are important parameters for maintaining adhesion [33,52,53]. For a specific loading direction, special tip microstructural geometry can reduce the stress concentration up to 50-fold times and improve the adhesion of each fiber [32]. A smaller scaled tip geometry needs smaller deformation energy and produces good stress distribution on contacting surfaces. Hence, sensitivity to tip geometry pertaining to small-scaled structures is lower. However, for larger-scaled features, tip geometry is significant and influences adhesion in addition to the stress distribution. If soft material is used for the tip geometry on a larger-scale structure, it decreases both the deformation energy and shape sensitivity. However, this will increase the probability of fouling on the tips as well as the sticking of adjacent tips. Therefore, it is beneficial to have a small tip geometry of microstructures.
In addition to microstructures, fibrillary structures reduce the rigidness of bulk materials in order to make the adhesive tacky. Geckos apply β keratin for their adhesive structures, which supports this theory [32]. Based on the mentioned ‘tacky’ principle, Kim et al. [32] developed a robot named “Sticky Bot” which employed hierarchical fibrillary microstructures in its adhesion system (Figure 3). The robot’s feet comprised directional polymer stalk (DPS) adhesives manufactured from PU. The benefits of this robot were:
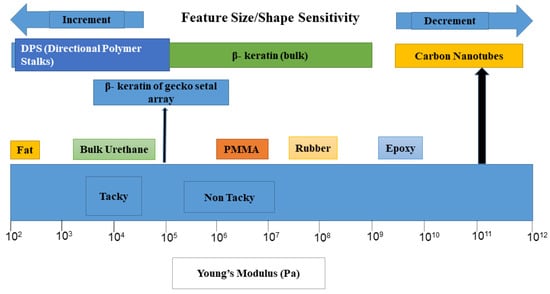
Figure 3.
Shape sensitivity is shown for various materials. Young’s modulus range of various materials and feature size of the distal end of multiple structures. Adapted with permission from [32]. 2008, IEEE Xplore.
- It could stick on surfaces with varying roughness from micrometer to centimeter scale;
- It could attach and detach from surfaces easily by controlling tangential forces during directional adhesion;
- It employed force control, which functioned with body compliance along with the oriented adhesive to regulate tangential forces of the foot.
The disadvantage of this model was the fouling of the DPS over time. The fabrication of better adhesives with refined fibrillary structures might solve the limitation in the near future.
Although many investigations have been carried out on dry fibrillary adhesives since their inception, most of these investigations have been performed on precisely oriented materials and smaller sample sizes. Only a limited amount of research is available on materials with a larger area and larger load that could maintain sufficient adhesion [54,55]. Moreover, there has not been much work conducted with the accurate positioning and application of load. The majority of practical robots employing microstructured dry adhesives could not attain the same level of adhesion compared with those of standard test experiments [32,36,56]. This limitation might be counteracted by employing a bigger gecko-based robot foot. However, if a larger foot is designed, it will be tough to supply the necessary adhesion because the length of the foot will extend, causing the mass and the contact area to increase [34]. In order to climb and carry a payload for a bigger robot, it is necessary that the amount of adhesion attained must be similar to that obtained from standard tests. Furthermore, the adhesive must be able to adjust load variation as well as a deviation in alignment. To overcome this drawback, Hawkes et al. [34] proposed two distinct mechanisms with identical capabilities. In the first mechanism, an adhesive tile, a tendon-like string, and an adaptable support were assessed and compared with that of a standard test sample (Figure 4). The second mechanism employed many independent tiles into an array which was tested and compared with a single tile mechanism. For a gecko-inspired adhesive to be able to work under inaccurate orientation, varying load, and large surface area, two designs were proposed [34]. The first design demonstrated full contact of the adhesive features with the surface (Figure 4a). Every distinct microstructure of the adhesive should make contact with the surface so as to be able to produce maximum adhesion (Figure 4b). The second design proposed that every distinct microstructure of the adhesive must encounter the same load distribution (Figure 4c). As shown in Figure 5, the functional components of the robot used for this experiment were (a) rigid tile backing, (b) compliant support, (c) tendons, (d) pulley, and (e) pressurized sac. For a particular direction, the adhesion was sufficient to help the robot attach and detach from surfaces easily.
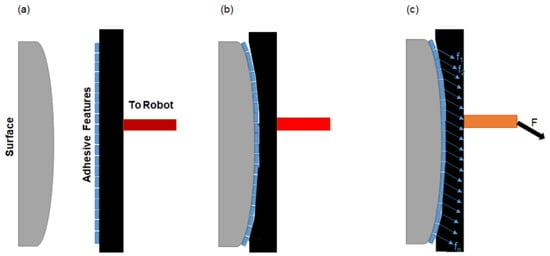
Figure 4.
(a) Model explaining the design requirements; (b) all distinct microstructures of the adhesive in contact with the surface; (c) all distinct microstructure of the adhesive experience uniform load. Adapted with permission from [34]. 2012, IEEE Xplore.
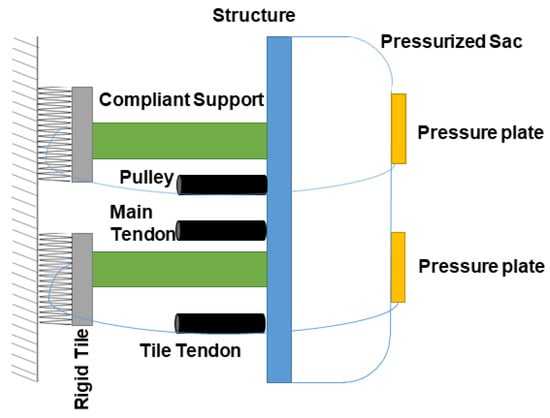
Figure 5.
Functional components of the proposed robot by Hawkes et al. Adapted with permission from [34]. 2012, IEEE Xplore.
In Figure 5, the compliant support provides full contact with all tiles while preload is applied. Tile tendons pass from the center of each tile to a pressurized sac, which ensures that each tile obtains a similar loading force. The resultant of single forces pass through the structure and into the main tendon [34].
Murphy et al. [19] later designed and fabricated a robot named Wallbot II. In this model, footpads were fabricated using PU. The fibers had dimensions of 57 µm in stem diameter, tip diameter of 114 µm, and length of 113 µm. A 2.8 mm of soft foam, with a stiffness of 676 N/m, was inserted amongst the foot and fibrillary adhesive pad (Table 1). This was beneficial because it increased the conformity to the footpad and reduced misalignment within the fibers and surface. As a result, consistent load could be obtained during preloading of the robot. The robot could climb vertical surfaces with high surface roughness. Additionally, the surface roughness was sufficient to stop the robot from adhering to the surface if it had flat, unstructured adhesive pads. This robot was able to carry a payload which was more than its body weight. Due to the fibrous footpads, the consumption of power could be lowered, and the climbing speed of the robot could also be enhanced.
2.2. Elastomeric Adhesion
With the advancements in science, researchers have fabricated synthetic polymers. These polymers are often termed “elastomers”. Elastomeric adhesives are natural or synthetic materials possessing wonderful peel strength but low shear strength [57]. Their resilience provides good fatigue and impact properties. These materials are mainly of four types: (1) tapes, (2) gels, (3) flat elastomer adhesives, and (4) fibrillar elastomer adhesives [36,58]. Applications of elastomeric adhesion are relatively new. The elastomeric adhesion mechanism is usually applicable when the surface roughness is less than a few micrometers. The benefit of this type of mechanism is its energy efficiency, noiseless operation, and applicability to a variety of smooth surfaces (on account of intermolecular-force-based adhesion), even in a vacuum. Due to intermolecular-force-dependent adhesion, elastomers are able to function over different surfaces and environments [58]. Researchers observed that dry elastomers stick to a given surface roughness when compressed perpendicularly to the substrate. The adhesion force developed by this mechanism is approximately 100 KPa [59,60,61]. When the adhesive material sticks properly to the surface, it can remain attached to the surface for a longer duration without any additional power requirement. For efficient vibration-free detachment, these elastomers are expected to peel off similarly to gecko foot hair [6,62,63]. The main disadvantage of elastomer-based adhesives is that they can easily be dirtied. The dirt or contamination on these adhesives can be removed by cleaning their surface with alcohol or acetone to regain adhesion [58]. Unver et al. [36] proposed a robot attachment technique using a soft dry elastomer named Vytalflex-10 (V-10) (Table 1). The surface roughness of this elastomer was approximately a few micrometers. V-10 elastomers have been successfully validated as an effective adhesive material for rough surfaces in previous research [36]. The researchers fabricated a tank-like robot employing non-patterned elastomer adhesive treads, which were in the form of curved wheels. The adhesion force of this elastomer was directly proportional to the contact area; thus, the adhesion force could be extensively increased by designing the wheel as a tread shape which increased the contact area. The adhesive force on this elastomer was a function of the contact area and could be improved by widening the track width or by increasing the number of wheels in parallel. Applying multiple tread shapes on the robot, it was found that the robot could carry various payloads, perform easy transitions, steer easily, and move around for many tasks. The robot could also be stopped on a vertical glass surface without consuming any power for a considerable time [36]. However, the major challenge of this robot was frequent fouling of the adhesive tread wheels.
Hansen and Autumn [64] showed that fouled gecko foot hairs can recover around 50% of shear adhesion after making contact with many dry and clean surfaces. Lee and Fearing [65] assessed the contact-based self-cleaning of hard polymer adhesive fiber arrays that were contaminated. They found that these adhesives can recover around 30% of shear adhesion after touching clean surfaces [65]. Kim et al. [66] experimented and highlighted that fouled soft elastomer arrays could be washed with a drop of water, and this could help them to recover almost 100% of adhesion. However, this self-cleaning mechanism of these elastomer fibers led to only 20% to 30% adhesion recovery in actual experimentations, which was a major drawback. In another study, Unver et al. [58] utilized non-patterned elastomers as adhesives for attachment purposes (Table 1). Their model provided higher adhesion for the designed robot. It was also observed that these elastomer-based adhesives were able to perform better on smooth surfaces compared with rough surfaces (Figure 6). Furthermore, in order to align the robot footpads better, a foam material was used, which helped to obtain higher preload, and correspondingly, better adhesion [58].
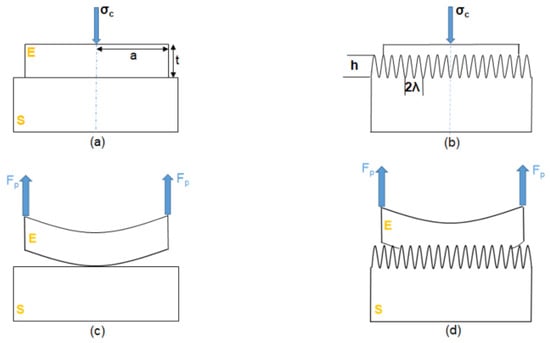
Figure 6.
Attachment and detachment process involved in a soft flat elastomer robot foot with radius ‘a’ and thickness ‘t’. (a) Attachment of Vytaflex elastomer (E) to a smooth surface (S) when a compressive pre-load of σc is applied; (b) attachment of Vytaflex elastomer to a rough surface, with amplitude ‘h’ and roughness wavelength ‘λ’; (c) detachment process of Vytaflex elastomer from a smooth surface when a tensile force, Fp, is applied; (d) detachment process of Vytaflex elastomer from a rough surface when a tensile force, Fp, is applied. Adapted with permission from [58]. 2009, IEEE Xplore.
Advanced elastomers have recently been introduced by researchers. Amongst them, silicon elastomers possess a wide range of applications in robotics. Continuous investigations have been ongoing to interpret the connections between silicon’s structure and its mechanical properties. It was observed that the low surface energy of silicon elastomers substantially limited the possible modifications [37,38]. Simaite et al. [39] examined 11 different elastomers (Table 3) and explained their adhesive properties. It was observed that metal oxide particles in elastomers increased adhesion. Therefore, excessively doped elastomers used to fabricate the microstructured adhesives worked better relative to unstructured, flat adhesives. Additionally, it was noted that the adhesion of unstructured elastomers was dependent on bulk dissipation. However, for structured adhesives, the adhesion relied on interface toughness. It was proven that microstructured adhesives were more effective on rough substrates. Moreover, it highlighted that the important parameters to explain adhesion strength in both unstructured and structured adhesives are mechanical properties such as elastic modulus, E, loss factor, tanδ, and surface properties such as work performed due to adhesion, WA, free surface energy, γeff, and root-mean-square roughness, RRMS. Amongst these parameters, loss factor is a mathematical term which is defined as the ratio of energy loss to that of the sum of energy loss and strain energy of the adhesive [67]. It varies with the shear modulus of the adhesive.
Table 3.
Elastomers and their curing conditions. MR, mixing ratio; CT, curing temperature; Ct, curing time; CT2, secondary curing temperature; Ct2, secondary curing time [39].
2.3. Electrostatic Adhesion
Electrostatic adhesion is an electrically compliant adhesion mechanism that requires creating electrostatic charges on a wall surface, employing a power supply connected to a specific electrode panel [40]. This electrode panel consists of at least two sets of non-dependent electrodes at different potentials. When alternate positive and negative charges are developed on adjoining electrodes, electric fields are set up on the wall surface. This causes electrostatic adhesion between the electrode panel and the wall surface. The advantage of this process is that it can be used to carry a light load in gecko-inspired robots. It utilizes less power and can provide adjustability to various wall surfaces. Chen proposed a gecko-inspired robot that worked on the basis of electrostatic adhesive force [40]. In this model, the base of the adhesive footpad was composed of polyimide film (PI) with a specific thickness. On this PI film, electrodes fabricated from copper with specific thickness were deposited (Table 1). This entire material was covered by another PI film with a similar thickness to the base material. Due to the pliability of copper and PI film, the adhesive footpad could easily detach from the conforming surface, and buckle during attachment. On top of the footpad, a layer comprising six bendable plastic bars was employed and positioned in radial directions. This helped the footpad conform to the surface efficiently, as well as keep its shape during attachment and detachment. From the experiment, it was observed that the robot made with this electrostatic adhesive could walk as well as turn on the vertical glass surface. The maximum speed obtained from this robot was 2 cm/s, and the highest angle to which it could turn was 30°.
When a large voltage potential is applied across electrodes, fixed in a dielectric medium, an electrostatic field is created, which consequently creates adhesive force [68]. The benefit of this type of adhesion is that it is applicable to both conducting as well as non-conducting surfaces [43]. The degree of electrostatic adhesion relies on voltage potential, electrode geometry (breadth, thickness, and pattern), insulator thickness, and substrate permittivity [69]. The magnitude of the adhesive force is directly proportional to the voltage applied and substrate permittivity. Additionally, decreasing insulator thickness or breadth between the electrodes increases adhesive forces. For conductive surfaces, electrons are free to move towards positive electrodes and form electron holes under negative electrodes. However, for non-conductive surfaces, the electric field polarizes the substrate’s molecules, thereby creating an attraction force [69].
Electrostatic adhesives can be a game-changer in space conditions, where ferromagnetic materials are rare, pressure-sensitive adhesives do not work properly, and the suction phenomenon does not work due to the absence of an atmosphere. They can be utilized for both vacuum and non-vacuum applications [70]. There have been attempts to create other electrostatic adhesives by various researchers. One method was creating an electrode pattern with polyethylene terephthalate (PET) and later coating it by spraying it with a thin layer of resin as an insulator [41] (Table 1). This method mainly worked well on smooth surfaces due to the thin layer of resin-coated surfaces, which increased electric field strength. However, the electrostatic adhesives were unable to stick to rough surfaces, which was its main disadvantage. A different method of creating electrostatic adhesives was using metal or carbon traces stuffed between mylar sheets [42] (Table 1). This method enabled the adhesive to partially stick to the surface. On the other hand, Ruffatto et al. [44] fabricated a new electrostatic adhesive, which involved implanting a copper- and nickel-coated conductive mesh inside a soft silicone dielectric (Table 1). The mesh here was chemically etched with a ferric chloride solution in order to create an electric pattern. It was observed that this process produced a highly adaptable electrostatic adhesive pad possessing good surface friction properties. This process allowed the adhesive pad to stick to micron level rough surfaces, thereby creating a large contact area. Dadkhah et al. [43] used a similar fabrication process to produce a better adhesive by employing a copper-clad kapton (PI film) instead of nickel-coated mesh.
For a long time, researchers have been trying to develop new manufacturing techniques in order to produce artificial microstructured adhesives. Synthetic fibrillary adhesives employ multiple structures to engage with a surface in order to reduce crack propagation and also to improve surface adaptability [43]. Few of these adhesive use nonsymmetric or directional microstructure hairs that create a large real area of contact when loaded in a specific direction. Furthermore, if the load is made opposite, the adhesives release from the surface with almost no force. A new field of research which is still in the nascent stage is the combination of electrostatic adhesives along with microstructured adhesives, which results in an even stronger adhesive [43]. In this regard, Berengueres et al. [71] inserted electrodes inside the dry adhesive microstructures, but the electric field could not disperse into the substrate [44,71]. In another study, Krahn et al. [72] used silicon to prepare a non-directional fibrillary adhesive, which exhibited better properties. However, this material oxidized rapidly. Furthermore, Ruffato et al. [73] tried fabricating a microstructured adhesive into the surface of an electrostatic adhesive. This electrostatic parameter provided a normal adhesion force which helped the adhesive stick to the surface properly. The benefit of the microstructured adhesive was that it provided a fit to micro-scale features, reduced crack propagation, and resulted in a larger surface contact area. This combination of electrostatic adhesives and microstructural fibrillary adhesives improved efficiency over different materials and surface roughnesses.
Dadkhah et al. [43] fabricated a new electrostatic adhesive on eight different materials, as shown in Figure 7. A novel fabrication method known as the bi-layer technique was employed here to manufacture the electrostatic adhesive. The bi-layer is fabricated by setting positive and negative electrodes on opposite sides of a kapton film. The positive electrode is clubbed between two kapton film layers. The bi-layer technique has an advantage over the uni-layer technique, in that it provides more output and is resistant to short circuits. From the experiment, it was observed that shear stress was significantly better when the adhesive detached from the substrate in a bi-layer compared with a conventional electrostatic-designed adhesive. The new adhesive using a bi-layer could improve the adhesion properties of the microstructures.
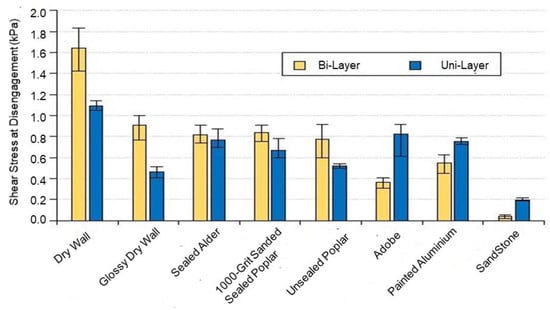
Figure 7.
A chart showing experimental results of shear stress obtained using the bi-layer method and uni-layer method applied on different substrates. Adapted with permission from [43]. 2018, Elsevier.
There are many cases where robots are required to operate in difficult-to-reach regions, with a lesser amount of energy available. Generally, it takes more energy for a robot to remain in a constant position, compared with when it is in motion [18]. Ruffatto et al. [18] developed a novel wall-climbing robot which employed a hybrid electrostatic adhesive to perform the assigned tasks, for an extended time duration. They developed a less power-consuming electrostatic anchoring device coupled with a surface layer of gecko-based adhesives that were able to repeat anchoring, ranging from a few seconds to longer than five weeks. An adaptable foam material was introduced here, between a stiff plate and adhesive surface, in order to allow the adhesive to attach effectively and carry a large shear force. A dielectric material was selected, which did not deteriorate over five weeks of operation compared with other conventional materials. To design the electrostatic adhesive and pad size, optimum materials were investigated. To design the pad size, the limitations of payload mass were determined based on anchor dimension and adhesive potential. Amongst the material to be selected (Table 4) for dielectric film insulators, PI was considered a popular choice due to its better temperature stability, greater breakdown resistance, optimum dielectric constant, and high water absorption property [18]. However, there was a limitation to this material. It was found that PI film adhesive material deteriorated while exposed to a large electric field.
Table 4.
Comparison of materials that could be used as dielectric film insulator [18].
Based on data from Table 4, polyethylene terephthalate (PET) and polyethylenenaphthalate (PEN), were considered as feasible alternative materials for adhesive fabrication. The advantage of PET and PEN was that they exhibited greater adhesive pressure without deteriorating during the extended duration. Polyphenylene sulfide (PPS) was difficult to obtain, and hence, not considered. To decrease power consumption, an electronic switch circuit was used in this study. In addition, a layer of silicone foam was employed to assist the anchor. In addition to the foam, a magnesium metal bracket was used behind the foam, to help distribute load uniformly across the footpad, as shown in Figure 8.
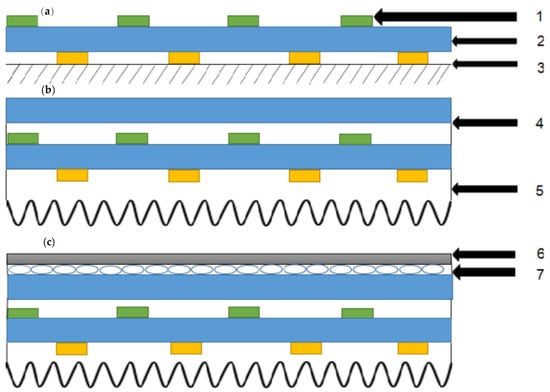
Figure 8.
The fabrication process of fabricated hybrid adhesive anchor: (a) Metal is deposited giving the required electrode shape on the substrate (consisting of 1, 2, and 3); (b) A layer of PEN film over the positive electrode acts as an insulator. Putting gecko-inspired adhesive on the front surface finishes the adhesive pad (consisting of 4 and 5); (c) fabrication of full anchor is achieved by employing a foam-backed magnesium bracket (consisting of 6 and 7). Adapted with permission from [18]. 2018, IEEE Xplore.
In Figure 8, 1 represents a set of shadow masks during the electron beam evaporation process; 2 represents a magnet; 3 represents a stiff base plate on which the shadow mask and base plate rest; 4 represents an extra PEN film layer which acts as an insulator; 5 represents spin-coated silicone on a microstructured wax mold; 6 represents a metal bracket for constant load distribution covering the pad; and 7 represents a layer of silicon closed cell foam to help the anchor adjust to surface irregularities [18]. From the experiment, adhesive force in a normal direction was studied on different surfaces, such as drywall, polished wood, glass, and aluminum. The highest adhesion was observed on wood, followed by aluminum, then glass, and the lowest adhesion was obtained on drywall. This study explained that when electrostatic adhesives were coupled with gecko-inspired adhesives, the combined adhesive acted as a less-power-consuming anchoring device, which could also reorient itself as per requirements. Song et al. [74] performed experiments and model analyses through which the contribution of electrostatic force emerging from setae adhesion of gecko was studied. In the experiment, they observed that by touching the substrates with only 1/70th of the foot area, geckos formed tribocharge at their toes with a density of 277 pC/mm2. This helped in the formation of electrostatic attractions of 4.4 mN/mm2. From this result, they estimated that triboelectrification adhesion could be approximately 1% of total adhesion. Next, the model analyses performed at the gecko’s spatula level showed similar outputs that electrostatic force may be approximately 3% of total adhesion. This lower amount of electrostatic force explained the reason why geckos find it challenging walking on these substrates (such as Teflon), where tribocharge can easily develop, but developing van der Waals forces is problematic.
2.4. Thermoplastic Adhesion
Thermoplastic adhesion is a mechanism which takes place on polymers that melt above a specific unique temperature and solidify upon cooling [75]. Taking inspiration from geckos, many synthetic adhesives possessing thermoplastic nature have been developed by researchers [46]. Generally, PDMS and PU elastomers have been used in order to fabricate dry adhesives [53,76,77]. However, the thermosetting nature of these materials is a disadvantage due to their more material costs, the repeated need for vacuum degassing, and higher curing times [45]. Khaled et al. [45] established poly (styrene–ethylene/butylene–styrene) (SEBS) thermoplastic elastomers possessing directional and non-directional performance, as a substitute material to PDMS and polyurethane (PU) for the development of dry adhesives (Table 1). The benefit of these materials is that they are less contaminated due to oligomer transfer and are also suitable for mass production. In this experiment, oligomer transfer was analyzed on PDMS, PU, and SEBS thermoplastic elastomer, which was in contact with an inflexible surface. Mushroom-shaped dry adhesives were developed from thermoplastic elastomers using a thermocompression molding process. As shown in Figure 9, SEBS was prepared by incorporating solid kraton pellets to a specific volume of hexane solution. Isotropic and anisotropic adhesive specimens were fabricated from SEBS by thermocompression molding.
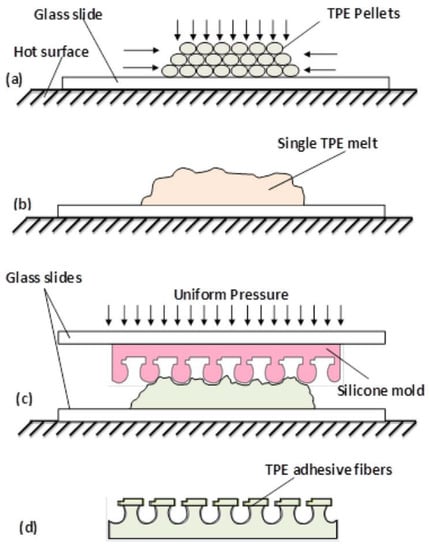
Figure 9.
Fabrication process of SEBS thermoplastic elastomer performed by thermocompression modeling: (a) SEBS thermoplastic elastomers (SEBS-TPE) lying on a glass slide melted using slight pressure; (b) formation of a single SEBS-TPE melt; (c) a silicone mold placed on the single SEBS-TPE melt with desired force; (d) the silicone mold, SEBS-TPE melt, and glass slide are removed from the hot plate and allowed to cool. Later, TPE adhesive fibers are formed. Reprinted with permission from [45]. 2014, ACS.
Surface fouling tests using X-ray photoelectron spectroscopy (XPS) revealed that both PDMS and PU carried small amounts of oligomers, but kraton thermoplastic did not exhibit any detectable oligomer of it. In their study, two forms of thermoplastic elastomer dry adhesives, i.e., isotropic and anisotropic, were contrasted with polyurethane (PU). The benefit of this thermocompression molding of the thermoplastic elastomer process was that it could produce adhesive relatively more quickly, involving cheaper costs of the base material, and negligible oligomer transfer.
In a different study, Zhang et al. [47] studied the thermoplastic property of a commercially available product named SU-8. They used a combination of conventional photolithography (CPL) and capillary force lithography (CFL) techniques to prepare hierarchical micropillar arrays with different aspect ratios of a single PDMS polymer mold by harnessing the thermoplastic and photosensitive nature of SU-8. The developed material was highly cross-linked, possessing high thermal and mechanical strength. By regulating the film thickness of SU-8 on a substrate, various micropillar arrays with different aspect ratios were developed. In this study, because of SU-8′s thermoplastic and photosensitive nature, various hierarchical structures were fabricated by combining CPL and CFL. The limitation of this model was when the micropillars became excessively tall, damage was observed due to the capillary force.
The attachment manner of artificial adhesives is delicate for the geometric dimensions of microstructures which constitute fibrillary surfaces. The main factors which influence the adhesion, friction, and mechanical behavior of individual fibers of an adhesive are the fiber aspect ratio [78,79], tilting angle [80,81], tip shape [82,83], and hierarchy [84,85]. Usually, synthetic adhesives possess a higher aspect ratio or are thermoplastic in nature. These materials are fabricated by molding from lithographically defined hard templates or by soft lithography techniques [86,87]. However, there is one geometric aspect that could not be regulated by the above method, which was sidewall tapering of the fibers. Kim et al. [46] studied this property and tried to improve its working. They introduced a procedure that could command over the lateral tapering of microfibers. Later, this tapering was replicated by low-density polyethylene (LDPE) thermoplastic to analyze the effect of macro-friction, as shown in Figure 10. They observed that the tapering angle plays an important role in thermoplastic adhesives, which can significantly improve adhesion (Table 1). It was observed that the etching procedure tapered and thinned the micropillars, but at the same time, the pillars also shortened in height. If the etching solution was diluted by water, then the tapering angle of the pillars decreased. Utilizing these reduced taper angles of pillars, different shapes could be fabricated as shown in Figure 10.
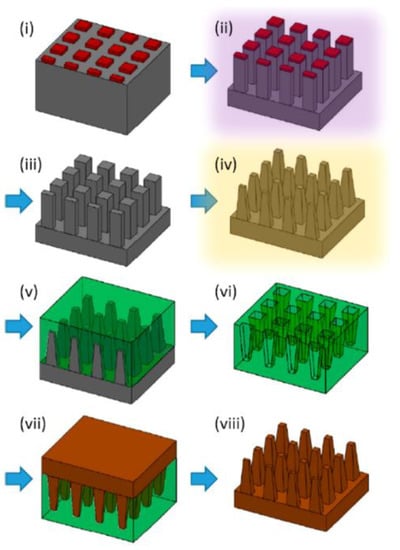
Figure 10.
Fabrication process of tapered square silicon pillar template and their copy imprinted on an LDPE thermoplastic: (i) photoresist pattern process; (ii) deep reactive ion etching; (iii) removal of photoresist; (iv) hydrofluoric/nitric/acetic acid etching; (v) polycarbonate film molding; (vi) template peel off; (vii) LDPE film mold; (viii) dissolution of template in methylene chloride. Reprinted with permission from [46]. 2014, ACS.
Hoang et al. [88] designed a soft robotic gripper whose work performance was improved by adding an elastomeric gecko-inspired adhesive and a thermo responsive variable stiffness filament. The results from the experiments performed here show that the gripper’s holding force improved by 655% and the pull-out force improved by 507%. The materials used for this study were cheaper and could find potential applications where gentle grasping, as well as high load capacity, are required. Table 5 summarizes some gecko-inspired materials used for the fabrication of adhesives, in addition to their advantages, disadvantages, and applications.
Table 5.
Summary of some commonly used gecko-inspired materials for adhesive fabrication.
3. Factors Affecting Gecko Toe Adhesion
In real life, geckos’ dwell on a variety of environmental conditions, such as deserts and tropical forests, consisting of surfaces that are often hot, wet, and experience humid conditions. Considerable studies have worked to understand the mechanics of gecko adhesion, but the majority have been performed under highly controlled laboratory surfaces. Less information is available about how surrounding factors such as wet conditions, humid conditions, and surface roughness impact the adhesive abilities of geckos in their natural habitat. Hence, it is necessary to study how environmental factors impact the natural adhesion capabilities of geckos. This study becomes more useful when fabricating gecko-inspired synthetic adhesives that are expected to work better in real environmental conditions. The next section explains in detail a few important parameters that affect gecko adhesion in real surroundings. In this section, different parameters that impact the adhesion of geckos are explained.
3.1. Influence of Temperature and Humidity on Gecko Toe Adhesion
When fully submerged under water, geckos exhibit a loss of adhesive capability due to lower van der Waals forces between their toes and a substrate. Thus, examining the effect of temperature and relative humidity on gecko adhesion is useful for the design of gecko-inspired adhesives. This would help synthetic fabricated adhesives to be able to work under real environmental conditions. To date, substantial experiments have been carried out to investigate the effect of temperature on gecko adhesion [89,90]. However, the experimental data sometimes provided erratic results. Peng et al. [91] mentioned that one study had shown that the adhesion force of geckos constantly reduces with increasing temperature, within the temperature range of their natural habitat (17–40 °C). However, the possibility of fabricating temperature-independent gecko-based adhesive was also presented in the literature [89].
Niewiarowski et al. [92] summarized the temperature consequence of gecko adhesion performed by Stark et al. [93] in 2016. The former research group mentioned that the result of temperature on gecko adhesion was complex, and felt that the relationship between temperature and relative humidity should be considered. They explained three major limitations of gecko-based synthetic adhesives: (a) insufficient theory and data on the mechanics of synthetic adhesives under non-ideal situations (wet, dirty, and rough surfaces); (b) lack of understanding of the contribution by natural gecko-inspired adhesive materials such as skin and lipids as unique compared with their structure; and (c) insufficient qualitative and quantitative data on the working of live geckos on natural substrates. Addressing these limitations will open up more applications for gecko-based synthetic adhesives.
Some of the important parameters that significantly contribute to gecko adhesion are contact van der Waals forces [94], electrification [95], and capillary forces [13]. Considerable research has been conducted on van der Waals force and capillary forces, although not much on contact electrification. All these parameters need to be studied under relative humidity (RH) to better understand gecko adhesion in non-ideal situations [92]. Lab-related research to understand gecko-based adhesion has been limited to major surface types such as smooth, dry, clean glass, or plastic. However, to better understand gecko adhesion, the effects of surface roughness comprising real surfaces differing in many length scales should be analyzed under wet conditions. Theory and lab studies have focused on the impact of control roughness on the surface adhesion and design of gecko-inspired adhesive, especially related to safety factors [52,84]. The safety factor is the capacity of a system to work higher than normal limits; for a gecko system, this needs to be studied under wet conditions. Gecko setae are naturally hydrophobic in certain conditions; it is very difficult to have a permanent superhydrophobic gecko toe. Badge et al. [96] performed an experiment in which a thick permanent hydrophobic coating was applied to gecko setae. The setae were later found to be superhydrophobic indefinitely and without any change [96]. Stark et al. [93] carried out several studies and analyzed the results of temperature and humidity on adhesion in a gecko-inspired synthetic adhesive. They established that the reaction of humidity must be considered in the study of temperature-dependent adhesion. Adhesion was found to be dependent on humidity, but only when the surrounding temperature was low [90]. Provided that the temperature effect is not considered, Huber et al. [97] and Sun et al. [98] experimentally observed the adhesion force of gecko seta (spatula) increasing with the rise in relative humidity. Puthoff et al. [99] further experimentally analyzed the impact of surrounding humidity on gecko setae and claimed that due to the wetting of gecko setae, there was a rise in adhesion force. In this same study, they discovered that an increase in RH results in softening of the setae as well as viscoelastic damping, which helps to increase adhesion. Tan et al. [100] studied the impact of RH on the adhesion of gecko-inspired nanopillar arrays. The nanopillar arrays were fabricated with PS material, where the array tips were shaped into spatula and T-shaped geometries. A superficial layer, softened by water from the humid environment was obtained on the nanopillars. This layer formed a kind of “soft shell-stiff core” geometric structure. This core structure reduced the stress distribution at the interface of each nanopillar and contributed to the enhancement of normal adhesion. In another study, Leckband et al. [101] showed that the water-repelling property of a lipid–protein monolayer is not a natural property of that surface. Moreover, this property is controlled by the surroundings [101]. They assumed that proteins on the surface experienced variation in compliance when exposed to a highly humid or wet medium, which helped in repelling water. Based on a similar experiment, Pesika et al. [14] carried out a study in which keratin protein imbibed setae of the gecko exhibited hydrophilic properties by varying the compliance of surface proteins. The study showed that the adhesion force of the gecko rose with humidity due to the increase in surface energy. However, adhesion force is reduced when the gecko setae are fully submerged in water due to the decrement of van der Waals forces.
To analyze the better impact of temperature and RH on gecko adhesion, Peng et al. [91] developed a theoretical model for understanding the peel-off force of a synthetic gecko spatula material under individual surrounding humidity and individual temperature conditions. The same study was performed under combined surrounding humidity as well as temperature conditions. In this study, a theoretical model of a nanofilm connected to a stiff substrate was taken for analysis purposes. The peel-off force, F, as a function of the peeling angle, θ, was taken into consideration for the analysis (Figure 11 and Figure 12).
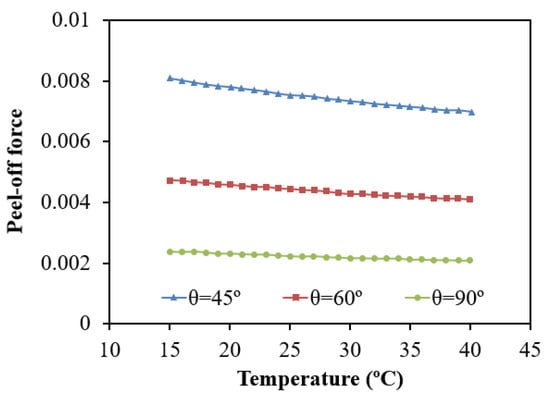
Figure 11.
Effect of peel-off force when compared with temperature under different peel-off angles. Adapted with permission from [91]. 2017, IOP Science.
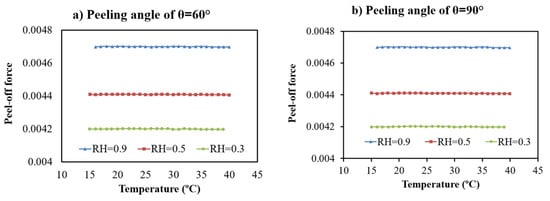
Figure 12.
Peel-off force (F) against temperature at three different relative humidity levels for two different peeling angles (a) θ = 60° and (b) θ = 90°. Adapted with permission from [91]. 2017, IOP Science.
Figure 11 indicated that with an increase in peel-off angle (θ), there was a decrease in peel-off force (F) when surrounding humidity was not taken into consideration.
Figure 12 shows higher peeling off force at lower peeling off angles, under the consideration of three different RH levels. In both cases, a higher peel-off force (F) was observed to correspond to higher RH. In addition, for constant relative humidity, peel-off force is not much concerned with temperature. The study exhibited that effect of temperature only on interface adhesion is not clear when RH is constant. However, the effect of RH only on interface adhesion is important when the temperature is constant. Furthermore, if surrounding humidity is not constant, then the combined impact of both RH and temperature is needed to be studied, due to the temperature-dependent nature of relative humidity. The results from this study could help researchers to design temperature- or humidity-controlled sensors for gecko-inspired robots. The second important parameter that needs to be understood for gecko-inspired adhesive capability is the surface roughness to which the gecko clings. Section 3.2 explains the impact of surface roughness on gecko adhesion.
3.2. Importance of Surface Roughness on Gecko Adhesion
Geckos can climb and walk on different surfaces. Adhesion studies performed on geckos highlight the influence of various levels of surface substrate roughness on macroscopic as well as microscopic scales [102]. In addition to adhesion, frictional forces are an important factor pertaining to geckos. A minimum frictional force can be distinguished for a specific range of surface roughness values due to which geckos can stick to a surface.
When analyzing the adhesion of an elastic body to a rough substrate, two parameters need to be understood: (a) attractive contact due to adhesion energy, and (b) non-attractive interconnection due to the formation of elastic strain energy during contact [102]. The implication of surface roughness on adhesion for gecko reptiles has been studied by researchers. In order to understand the impact of roughness on adhesion between two elastic bodies, an experiment was carried out by Fuller et al. [103]. Similar experiments had been carried out on geckos by Persson et al. [35] and Peressadko et al. [104], who tested rubber balls pressing against hard rough substrates. The tests highlighted that a net pull-off force could be computed from surface roughness power spectra secured from a measured surface height profile. This case presented an understanding of the adhesion mechanism for geckos, which could be assessed in two experiments: (a) calculation of the adhesion of a single gecko hair by atomic force microscopy (AFM), and (b) the inspection of live geckos sticking to surfaces of various surface roughnesses [102]. Huber et al. [102] carried out the above experiments to understand the impact of surface roughness on the adhesion of geckos to bulk materials as well as nanomaterials. The experiments were carried out at a certain room temperature and relative humidity. For the AFM experiment, nine dissimilar surfaces were marked according to increased root-mean-square (RMS) roughness. On the other hand, for checking the sticking ability of geckos to surfaces with various surface roughnesses, asperity sizes were created for the test in a range between 0.3 µm and 12 µm. It was observed that on surfaces with a nominal asperity size of 0.3 µm, geckos were not able to stick to the surface. On the other hand, increasing the asperity size to 1 µm, it was observed that lizards could stick to surfaces only for a while because their toes were slipping off after some time. Then, on further increasing the asperity size to 12 µm, geckos could stick to the surface for about five minutes. Generally, for bulk material, it has been observed that if surface roughness is incremented, then there is a decrement in adhesive force [103]. However, in the present experiment, for nanoscale, it was observed that the adhesive force of a gecko spatula decreased for intermediate RMS roughness varying from 100 nm to 300 nm. However, above and below this intermediate RMS roughness value, it was found that the detachment force increased. These data corresponded with those of live geckos, which are able to stick to substrates with high and low roughness [102]. This highlights the fact that when single spatulae are considered, geckos could stick to very smooth or very rough surfaces, but failed with intermediate roughness surfaces. This concept is useful to fabricate artificial gecko-inspired adhesives based on surface roughness.
It has been learned that there are very scant data available on the surface roughness characteristics of surface layers utilized by geckos for climbing. In reality, natural surfaces differ in roughness over distances ranging from seven to eight orders of magnitude [105]. The statistical tool of RMS has been used to indicate roughness for comparing different results. However, the limitation of this tool is that it makes the surface variation discrete in the landscape of a 3D surface into one entity which hinders analyses of important variations with respect to contact mechanics theory. Therefore, it is important to obtain quantitative data which can help realize the abilities of geckos sticking to different surfaces possessing dissimilar roughness values [106]. One of the reasons why geckos have fascinated researchers is their ability to stick on rough, dry, dirty, wet, and smooth surfaces, in spite of the fact that approximately 40% of gecko species do not possess an adhesive system [106]. Geckos are found to generally stick to natural surfaces such as flower petals, leaves, rocks, sand, etc., which have varied surface roughness values. However, most contemporary research on developing gecko-inspired adhesives is for very smooth surfaces. This is to develop artificial adhesives for applications in cleaning building surfaces or climbing smooth surfaces in the form of gloves and shoes. For example, Stanford’s Stickybot and DARPA Z Man project supports the fact that the major challenges in the fabrication of gecko-inspired adhesives are those related to highly smooth surfaces [106]. However, the contact mechanics of these artificial adhesive systems are dependent on the contact area, i.e., smooth and clean surfaces; in reality, geckos can easily stick to these smooth surfaces. The roughness of natural surfaces on which geckos stick and crawl differs so widely from atomistic to millimeter length [104]. Hence, how variations in surface roughness affect wild natural geckos has not been studied in detail. How fibrillary adhesives found in geckos create strong adhesion while adjusting variation in surface roughness at different lengths of scales is yet not understood clearly [107]. Niewiaroski et al. [106] tried to generate an analogy which can provide a new direction of study. They reported that ecologists had faced two significant problems in understanding the effect of the thermal environment on geckos: (a) how to prototype heat exchange between surrounding and geckos, and (b) the procedure to calculate temperature during heat exchange [106]. Hence, they developed a physical heat-based model based on thermal ecology to better study the impact of surface roughness on gecko adhesion. Usually, a physical model in thermal ecology is a copy of the gecko with similar size, shape, conductive, convective, and radiative heat exchange rates. This model is generally prepared from a hollow metal cast painted to complement the reflectivity of the live gecko, providing the model with an equilibrium temperature that is almost equal to that of the live gecko. In this model, PDMS is used to create a prototype of the physical model. This model was expected to interact with real surroundings, similar to the way natural geckos behave. From the adhesion tests performed on this model, it was observed that the adhesive force of the model was identical to that of the force produced by natural geckos. To understand this model better, it is also important to analyze its surface mechanics and the results obtained should be similar to those of natural geckos. This model provides future insights into testing fibrillary adhesives on model rough surfaces. Ye et al. [108] employed the reversible adhesive characteristics of gallium (Ga)-based liquid metal coatings to enhance the adhesion, reduce vulnerability to non-optimal conditions, and increase the maximum–minimum adhesion ratio (switching ratio) of PDMS adhesives. They controlled the phase change of Ga and found that it can be used as a new strong adhesive, possessing two adhesive states: (a) a high adhesion state (solid) and (b) a low adhesion state (liquid). It was observed that the maximum adhesion and the switching ratio were dependent on the roughness of the substrate. The results showed that the Ga-based coating method could be used as a potential adhesive for rough surfaces under both dry and wet conditions. Drotlef et al. [109] fabricated gecko-inspired skin adhesive films composed of elastomeric microfibers decorated with conformal and mushroom-shaped vinyl siloxane (VS) tips for wearable sensors. Here, it was shown that crosslinking of the VS tips helped in obtaining strong skin adhesion to the multiscale roughness of the skin. It was also observed that the fabricated adhesive could attach to other complex topographies over a wide range of surface roughnesses under both dry and wet conditions. Tan et al. [110], combining the adhesive advantages of gecko setae and creeper root, fabricated a switchable fibrillar adhesive. This adhesive consisted of PU as the backing layer and graphene/shape memory polymer (GSMP) as the pillar array. It was observed that the photothermal effect of graphene modified the GSMP pillars into a viscoelastic state which enabled enhanced adhesion on surfaces over a wide range of roughness. Controlling the phase state of the GSMP pillar helped in switching between high and low adhesion states conveniently.
4. Gecko-Inspired Adhesives and Related Fabrication Processes
Understanding the function of the natural gecko adhesion mechanism helps in deciding different materials as potential artificial adhesives inspired by geckos. It also provides insights to explore different fabrication techniques of artificial adhesives inspired by geckos. In Section 4.1, various gecko-inspired synthetic adhesives, their conventional fabrication methods, and a few recent fabrication techniques employed to develop them are discussed.
4.1. Conventional Fabrication Methods
Gecko-inspired adhesive was first fabricated in the early 2000s. It was observed that van der Waals forces are one of the major components in gecko adhesion. Van der Waals forces are the main mechanism of gecko’s setae adhesion; therefore, the adhesive force is more dependent on the size of the setal tips rather than the nature of its material.
Since 2000, different strategies have been developed to fabricate gecko-inspired adhesives. One of the initial studies on fabricating the nanoscale adhesion properties of gecko-inspired adhesives was performed by casting polyester resin [111]. Since then, various techniques have been employed to fabricate dry adhesives with modification of the adhesive material. Amongst them, micro/nanoscale casting and gas phase growth are the most remarkable. The number of studies performed using the gas phase fabrication method is relatively smaller than the casting method. This is because the gas phase method is expensive and requires a higher process temperature (greater than 700 °C) [87]. Geim et al. [112] fabricated a polymide-based foot hair array employing oxygen plasma technology and electron beam lithography. It was observed that the array could withstand a load of 40 g; however, the adhesion within itself was found to reduce the contact area as well as its durability. Gorb et al. [113] studied mushroom-shaped fibrillar structures developed by the injection mold method. The observations from their study were that the peel strength and the pull-off force of the mushroom-shaped structures were much higher than those of flat structures.
In addition, experiments have attempted to fabricate gecko hierarchical structures using various top-down and bottom-up approaches or combining both of them (hybrid methods) [114]. Apart from these, some of the other traditional fabrication methods were chemical vapor deposition, lithography, dip transfer method, and multi-step molding. Yurdumakan et al. [115] employed a chemical vapor deposition technique to form gecko-inspired adhesive tape on high-density carbon nanotubes. It was observed that the structures developed from this adhesive exhibited good adhesion forces at the nanometer level, and this force was 200 times greater than that of a single gecko hair. Aksak et al. produced microfiber arrays fabricated by a micromolding process [80]. The benefit of this process was that it enabled the fabrication of fibers in a non-vertical orientation. Greiner et al. [84] employed a combination of soft lithography and multi-step photolithography to fabricate hierarchical structures. They observed that the adhesion of fibrillar structures did not benefit from extra levels of hierarchy when experimented against planar surfaces. Jeong et al. [116] employed a two-step ultraviolet (UV)-supported capillary molding procedure to fabricate micro- and nanoscale hierarchical polymeric hairs. For fabricating the adhesive, the researchers employed an angled etching technique to produce slanted nano-holes in the adhesive. They further observed that by controlling the etching conditions, various nano-hairs could be fabricated with customized geometry.
The other classical fabrication techniques are casting and nano-molding. For the former technique, dry adhesive designs are fabricated by producing molds out of various materials. In the nano-molding process, a template is used with high-aspect-ratio micro- or nanoscale features in addition to curable liquid polymers. Procedures to develop a template were (a) the usage of an atomic force microscope to indent a wax surface by molding with silicone rubber, (b) the fabrication of a nano porous membrane, and (c) to selectively cure a liquid polymer exposed to ultraviolet light. This method was useful, but not meant for large-scale production. With progress over time, researchers experimented with new fabrication methods for fabricating superior adhesives.
4.2. Advanced Fabrication Methods
In order to overcome the limitations of conventional fabrication methods, researchers have developed many advanced fabrication techniques. Amongst them, two-step photolithography and deep reactive ion etching to fabricate adhesive templates are some of the recent techniques. Here, a fabricated template possessing compliant microstructures can then significantly modify its adhesive properties. Fabricated compliant fiber structure in close contact with the surface helps in the enhancement of adhesion. Some factors which were thought to impact the sticking nature of fibrillary adhesives are mentioned below [107].
(a) Stiffness of fiber: Autumn’s research group conducted studies to analyze the elastic behavior of gecko setae. The study revealed the elastic nature was due to the mechanical properties of the β keratin. Peattie et al. [117] explained that natural materials like β keratin were fruitful only when they are in fiber shape. Additionally, rigid fibers can be firmly packed instead of becoming concentrated mass [118]. This enhances adhesion simply by increasing the number of contact points. Thus, the stiffness of the fabricated adhesives is expected to exhibit similar behavior.
(b) The aspect ratio of fiber: Lin et al. (2011) showed that the effective modulus of fibers possessing a large aspect ratio can reduce with the bulk modulus of the fiber material [119] (Figure 3). The limitations of obtaining the optimum aspect ratio are due to complications in the fabrication processes.
(c) End geometry of fiber: The end geometry of fibers plays an important role in the nature of adhesion. Thus far, many experiments have been carried out on fibrillary pillars with various end shapes. Arzt et al. [79] showed that better adhesion could be obtained by reducing the radius of a fiber and raising the fiber length by employing a process known as ‘contact splitting’. Especially, mushroom-shaped pillars exhibited the highest pull-off force. Flat, spherical configurations yielded a lower adhesion force. Concave form end geometries exhibited the worst performance [120].
(d) Slanted fiber: Slanted fibers with a high aspect ratio exhibited anisotropic shear adhesion. This feature is beneficial for artificial dry adhesives [121].
(e) Environmental factor: In order to understand the effect of environmental factors on fiber structures, many studies have been carried out. Factors such as surface roughness, interfacial air entrapment, and fiber configuration have been studied to understand their impact on adhesion [122,123].
Table 6 highlights some of the recent synthetic materials used for the fabrication of gecko-inspired adhesives.
Table 6.
Enumeration of new adhesive material and their application.
Kang et al. [124] performed an experiment where mushroom-shaped microstructures from PDMS were developed on a bio-inspired dry adhesive. The microstructures were prepared by a simple molding method. In this experiment, the de-attachment process of the adhesive was conducted by a twisting method. The twisting process was obtained by implementing a shear force at the end of the developed dry adhesive, which resulted in easy detachment. To understand the process better, the factors of detachment were experimentally observed by contrasting the detachment force, total torque, and time required for detachment. Furthermore, all these factors were dependent on the adhesive width, as well as the angular momentum of twisting. This study recommends the detachment of dry adhesives by the twisting method rather than the traditional peeling off method (Table 6).
Silicone elastomers have been found to have various applications in different technologies such as robotics, [134,135] wearable electronic devices [136,137], and microfluidics [138,139], to name a few. Due to lesser surface energy, silicon is unable to interact with other surfaces easily. In order to improve the interaction of the silicon surface, a chemical process such as oxygen plasma has been employed by researchers [125]. Although the oxygen plasma process results in the development of strong siloxane bonds, the plasma has been found to also damage the PDMS foundation by reducing its mechanical strength. To overcome this drawback, Simaite et al. [125] studied the cross-linking reaction of PDMS as a silicon–silicon bonding enhancer for developing advanced gecko-inspired adhesives. It was found that these materials could be used to bond even after one week of molding (Table 6). It was also shown that increasing the cross-linking density at the interface could enhance the adhesion strength of these gecko-based adhesives.
Gwon et al. [140] employed a 3D printing method along with an additional polymer coating to fabricate direction gecko-inspired directional adhesive pads for grippers. Conventional 3D printing methods for fabricating directional adhesives have limitations in terms of tip size and surface roughness. The adhesive fabricated by this group of researchers not only compensated for these limitations, but was also observed to enhance the adhesion force. Additionally, when the adhesive was contaminated with dust, if cleaned with water or sticky material, it helped in restoring 95% of its normal adhesion force.
Busche et al. [141] fabricated an anisotropic dry gecko-inspired adhesive microstructure for the capture of space debris. The adhesive structures were fabricated using adaptable 3D printing with a two-photon polymerization process and replicated it with space-rated polydimethylsiloxane (PDMS). The fabricated adhesives exhibited a normal adhesion force of 1100 mN/cm2 and an anisotropic factor of 7.5, which was much higher than that previously developed adhesives for space applications. This study is useful for fabricating mass-producible adhesives pertaining to space applications where high anisotropy of the holding force is required. Researchers are further exploring new 3D printing methods to fabricate gecko-inspired adhesives that can provide enhanced performance.
5. Recent Progress of Gecko-Based Adhesives and Fabrication Techniques
Recent progress on gecko-based adhesives and their fabrication techniques has been classified into three types in this study for the convenience of readers. The classifications are:
(1) Switchable gecko-inspired adhesives;
(2) Shape-memory-property-inspired adhesives;
(3) Miscellaneous fabrication techniques.
5.1. Progress of Switchable Gecko-Inspired Synthetic Adhesives
Switchable bio-inspired adhesives have received significant attention from contemporary researchers. Northen et al. [142] attempted to create an adhesive from a composite consisting of a sticky polymer and magnetic nickel cantilevers. Increasing or decreasing the magnetic field led to variations in cantilever alignment. This ultimately improved the adhesive performance of the composite. He et al. [143] fabricated a polyvinyl chloride (PVC)-based switchable electro-active adhesive. It was noticed that the PVC showed switchable adhesion when treated under an electric potential. The switchable PVC-based adhesive was observed to exhibit greater adhesion force and response speed when compared with a reversible adhesive. Li et al. [144] fabricated a three-layer adhesive from TPU that exhibited switchable adhesion on non-flat surfaces. By adjusting the voltage, the adhesive was able to exhibit an enhanced adhesive force by 1 or 2 orders of magnitude relative to conventional adhesive structures. The adhesive was successfully employed in a gecko-inspired gripper for transportation activities. In another study, Paretkar et al. [145] proved that applying mechanical load on fibrillary hair structures, which produces reversible buckling, can lead to a reduction in adhesion on elastomeric pillars. Del Campo et al. [120] employed a liquid crystal elastomer which enabled an array of pillars to move nearer or far away. This allowed the formation or prevention of adhesive contact. Jeong et al. [146] fabricated a wrinkled PDMS adhesive, which could achieve attachment and detachment by stretching. This process was feasible due to variations in the alignment of the adhesive caused by changes in the fluctuation of wrinkles [146].
5.2. Progress on Shape-Memory-Property-Inspired Adhesives
Shape memory polymers (SMPs) have drawn researcher’s interest to fabricate artificial adhesives inspired by geckos due to their advantages such as lightweight, lower cost, the capability of recovering from strain, and good insulating behavior. SMPs possess the unique property where, upon the application of external parameters such as light or temperature, material properties can vary. Reddy et al. [147] experimented with a shape memory thermoplastic elastomer, Tecoflex 72D, where they could vary the adhesive performance of the polymer. The experiment showed that not only was the shape memory effect effective at the microscale, but it was effective even on surfaces that possessed switchable adhesion. Furthermore, research has been undertaken to develop superhydrophobic surfaces with SMP. However, developing a superhydrophobic surface with shape memory property is difficult. Geckos have a unique ability to unfold their toe pad and that varies adhesion properties. Based on this, Wang et al. [148] tried to create a film by putting a layer of column structured PU possessing super hydrophobicity (S-PU) on a shape memory polyurethane cellulose nanofiber (PU-CNF) substrate. This could act like hair structures of the gecko toe. The advantage of PU-CNF is that they can act similarly to gecko toe pad muscles and help the film to regain initial shapes. As a result, by varying the film shape, the hydrophobicity of the surface could be modulated.
Dry adhesives usually exhibit poor adhesion in underwater conditions. Many experiments have been conducted by immersing adhesives under water. Park et al. [149] fabricated a thermosensitive SMP adhesive and assessed its adhesion performance at different submerged conditions (underwater, saltwater, and oil). This thermosensitive SMP exhibited high adhesion strength of 18 atm measured underwater. This experiment explained that shape memory properties were one of the main factors for the high adhesion of this SMP exhibited in submerged conditions.
Researchers also fabricated a patterned adhesion system with switchable adhesion using a combination of SMP and shape memory alloy (SMA). Elmar kroner [150] fabricated one such pressure switchable system (PSS) with bio-inspired adhesives. It was observed in the PSS system that with a low preload that the tips of the pillar could form close contact, resulting in a high adhesive force during detachment. However, if a higher preload was provided, this would result in elastic bending of the pillars [145,151]. This bending exhibits a strong moment on the pillar tip, causing partial detachment. Again, if the load is released, the pillars can only form partial contact between the tip and the probe. It has been observed that this partial contact exhibits lower adhesion [152]. Therefore, controlled misalignment of surface patterns with the help of an external stimulus could possibly give rise to attachment and detachment in the adhesive properties of bio-inspired adhesives.
Superhydrophobic surfaces with various fluid adhesive properties are dependent on contrasting surfaces with dissimilar microstructures. Shao et al. [153] tried developing an SMP from PU, acting as a switchable surface, which can transform between isotropic/anisotropic super-wetting natures. It could also change its behavior from superhydrophobic to hydrophobic property, and vice versa. By varying the microstructures of the SMP, two different types of surfaces could be obtained. The surface possessing intact microstructure arrays exhibited good self-cleaning properties as well as low water adhesive force. This was similar to the lotus surface [154]. The other surface, consisting of compressed microstructures, exhibited high adhesive force, and this was similar to the rose-leaf model [5]. These models are being further investigated with ongoing research.
5.3. Progress on Miscellaneous Fabrication Techniques
It was discussed in Section 2 (Figure 1) that gecko toepads exhibit hierarchical structures consisting of macro-, meso-, and microstructures which help them to generate a frictional force to carry their body weight during fast locomotion [13]. This particular phenomenon inspired researchers to fabricate new surface textures with hierarchical structures similar to the gecko toepad. As a result, advanced research is ongoing in this field to develop gecko-like structures for robot applications. There are several ways to develop such hierarchical structures, e.g., photolithography, soft lithography, and a combination of both, as previously mentioned [84,155]. Amongst these methods, soft lithography is more advantageous over photolithography, because it employs a replica molding (REM) process. The REM process is cost-effective, less time-consuming, applicable for versatile materials, and capable of fabricating 3D geometries [156]. Due to these reasons, REM-based soft lithography techniques have become more popular compared with photolithography in the recent past. However, REM has a disadvantage too, in the sense that it requires a master mask. A master mask constitutes arrays of holes with preset measurements usually manufactured by a photolithography process. Hence, if multiple geometries were to be produced, it would make the process tedious and lengthy.
Another method used to develop hierarchical structures is 3D direct laser writing, which employs the two-photon polymerization (2PP) process [126]. Here, the material used is light-sensitive IP-G-780. The material is then applied with an epoxy (SU 8) coating and later baked with heat to dry the coating film. The material is subsequently exposed to a multiphoton light spectrum and consequently developed. The advantage of this method is that it enables the development of prototypes with random shapes and size resolutions of below 100 nanometers [157,158] (Table 6).
Another unique method of developing hierarchical structures is the dip transfer process, where a 3D-printed mold is utilized to create mushroom-shaped PU polymer pillars [127]. Then, this mold with developed pillars is dipped in a new silicon-etched mold in order to develop second level hairs. Subsequently, the polymer is cured, and the silicon mold is etched away. In this method, the adhesion is significantly enhanced due to the increased contact area (Table 6). In addition, Milonois et al. [128] employed fused deposition modeling (FDM) 3D printing to develop mini heat-exchanger-shaped fibrillary hair structures with discrete and continuous fins from acrylonitrile butadiene styrene (ABS) polymer. The material was coated with a layer of fluorocarbon and rubber after fabrication. It was found that the heat exchangers could repel water from the surface more effectively after coating. These water-repelling coatings have been assessed in various studies (Table 6), and the coated materials reduced adhesion and possessed less surface energy with nano/micro-scale roughness [159]. Moreover, to repel water, Feng et al. [129] developed a large hierarchical surface using dual-scale electron beam lithography (EBL) on epoxy (SU 8). The surfaces developed from this experiment exhibited both high and low adhesion and could function in wet conditions (Table 6).
Davoudinejad et al. [130] employed the vat photo-polymerization method, also called digital light processing (DLP)-based 3D printing, in the manufacture of new hierarchical structures. Here, the rationality of the samples was performed by microscopic observations and water contact angle tests. The material used here was a photopolymer resin. This process which employed a DLP projector had a mirror, a digital micrometer device (DMD), to regulate ultraviolet (UV) light source. The samples obtained by this method contained a constant thickness [160]. The vat photo-polymerization process used here worked on the principle of a liquid photopolymer resin contained in a narrow tub. In this experiment, two important parameters were exposure time (ET) and layer thickness (LT), which played the most important role in the development of the fibrillary hair structure diameters. From the experiment, it was observed that three different surface designs were obtained. The surface with larger contact areas exhibited the lowest water contact angle and also the least hydrophobicity. Furthermore, an increase in the fibrillary structure’s hair density resulted in higher water-repelling properties (Table 6). The designs in this experiment were found to be in coherence with the Cassie–Baxter equation (Equation (2)) for a heterogeneous surface. This equation explains the relationship between the water contact angle for a liquid drop and the fractional area of a hierarchical surface [130].
where and are the water contact angles on smooth and fabricated surfaces, respectively, and is the fractional area of the hierarchical surface. The benefits of this process are that it is relatively simple and takes less time for fabrication compared with other methods. If modifications were performed on the DLP machine, in addition to improvements in the materials used and reducing origins of error, then the feature size of the fibers could possibly be optimized.
It is worth mentioning that if the roughness of the surface on which sticking is desired is increased, then adhesion may decrease, especially for polymer fibrillar structure adhesives prepared from macroscale fibers [127,161]. Synthetic adhesives based on hierarchical multi-scale structures can solve this limitation because they comply with many types of rough surfaces [127]. To prepare such synthetic adhesives, different micro/nanofabrication techniques such as lithography, micro/nano-molding, and chemical vapor deposition have been utilized. However, the majority of the studies have highlighted the development of fibrillary structures based on micro- and nanofibrils. These have been observed to possess similarities to that of spatulae of original geckos. Useful adhesion could be obtained on smooth surfaces by the usage of new polymer micropillars and CNT arrays [82,162].
Sahay et al. [131] imitated the hierarchical design of indigenous materials by employing electrospinning in addition to the template wetting process (Table 6). The benefit of this technique was that it produced a high aspect ratio of polymeric fibers. In order to control the shapes of the structures at each level of the hierarchy, a two-step process is employed here. In the first step, the electrospun fibers copy the contact nature of the spatula. In the next step, the second level of the hierarchy is prepared by employing a permeable anodic aluminum oxide (AAO) template [163,164]. The benefit of this two-step process is that it helps to regulate the size of hierarchical structures at an individual level [165] (Figure 13a–c). Here, the material used was polyvinylidene fluoride (PVDF), on which electrospinning was performed. During the experiment, two structures were analyzed: one was neat PVDF fibrous samples, and the second was a hierarchical PVDF fibrous sample. Adhesive forces obtained from both these samples were studied using a nanoindenter. The pull-off force from both these samples was observed, as shown in Figure 14. For neat PVDF fibers, having a height above 200 nm, it was observed that height did not have much effect on the pull-off force. This can be explained by the fact that neat PVDF structures are not able to adjust to the surface irregularities, and their bad sticking property on the indenter surface is the reason for poor pull-off force. However, when the indentation height was increased from 50 nm to 200 nm for hierarchical PVDF, the pull-off force also correspondingly increased (Table 6). This can be explained by the fact that these surfaces were more compliant to the indenter surfaces. However, beyond 200 nm height of indentation, there was a reduction in the pull-off force. This was probably due to plastic deformation of the nanopillars of PVDF because of high load. It was also found that the pull-off force for this structure was similar to that of PDMS and vertically aligned carbon nanotubes (VACNTs).
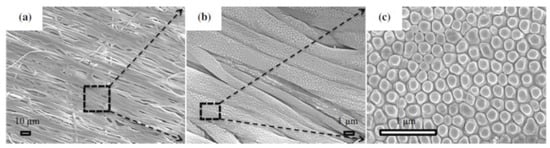
Figure 13.
(a) SEM image of a PVDF hierarchical fibrous specimen fabricated by the electrospinning method; (b) SEM image of electrospun PVDF hierarchical fibers combined with the template wetting method; (c) more highly magnified SEM images for the same specimen. Reprinted with permission from [131]. 2017, Springer.
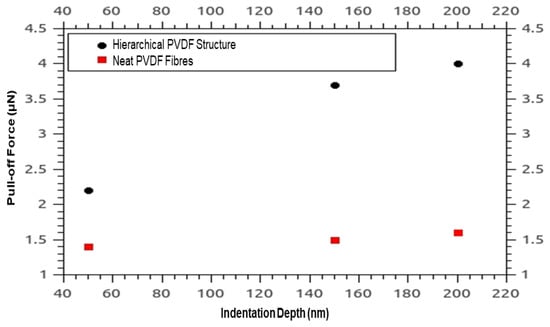
Figure 14.
Comparison of pull-off forces for the hierarchical PVDF structure and neat PVDF structure. Adapted with permission from [131]. 2017, Springer.
It has been observed in nature that geckos can modify their material properties by utilizing their microstructures. Many artificial adhesive variants have been fabricated, mimicking these gecko structures [166,167]. However, one key parameter of such natural variants in geckos is spatial variation. It has been observed that spatial variation is usually absent in bioinspired synthetic materials. It is this change in the spatial variation on gecko feet structures which allows them to stick to surfaces differently. For example, geckos have a diverse adhesive structure, where small setals are situated near lamellae, and larger setals are situated far away from the lamellae [168,169]. In addition, Brodoceanu et al. [107] reviewed a combination of different micro-manufacturing processes pertaining to gecko-inspired adhesives, showcasing their design parameters, describing conventional fabrication methods, polymer- and CNT-based adhesives, and some of their limitations. They concluded that CNT-based adhesives were superior compared with polymer-based adhesives. CNT adhesives are less susceptible to fiber buckling and possess no significant decrease in adhesion.
Suresh et al. [132] investigated how spatial variation can improve the efficiency of synthetic microstructures related to geckos (Table 6). In their study, the researchers assumed a quantity of friction ratio, which was the mathematical ratio of adhesion-controlled friction in the desired direction to that of adhesion-controlled friction in the opposite direction. Previous studies have shown that using invariable microstructure features, asymmetric friction was achievable in synthetic polymeric adhesives, providing friction ratios from 2:1 to 10:1. These polymeric adhesives were found to utilize tilted features [116,170], asymmetric features [83,167], and the union of both features [171]. Lee et al. [81] highlighted an adhesive material, exhibiting constant, strong polymer fibers which could achieve a friction ratio as high as 45:1. Here, the asymmetric nature of synthetic adhesives could be because of undesigned spatial variation related to the fabrication process. Hence, this indicated the significance of spatial variation in the asymmetric frictional nature of synthetic adhesives.
Suresh et al. [132] designed an adhesive, using a surface micro-sculpting process. The adhesive was modeled in such a way as to yield high friction in the desired direction. In order to reduce friction in the opposite direction, two small areas of wedges at the corners of the adhesive were drawn (Figure 15). In Figure 15, (a) natural state, Type 1 features are all at a similar height and produce a contact when touched to a surface; (b) applying shear force in the preferred direction makes the wedges come into contact with each other, thereby increasing contact area; (c) applying shear force in the reverse direction makes the wedge come into contact with each other on the opposite faces in the reverse direction, to increase the contact area; (d) friction obtained here in the reverse direction is alike to friction obtained in the preferred direction; (e) type 2 features exhibit increasing wedges both over the flap as well as the base; hence, there is one of the tallest edges; and (f) applications of a shear force in the preferred direction yield a deformation of flaps in order to make contact with the surface, thereby providing a large surface area; however, friction and adhesion obtained here were smaller than Type 1 features; (g) when a shear force is applied in the reverse direction, the tallest wedge stops any different wedges from making contact with the surface, and as a result, the contact area is decreased. In the first design, the maximum area of the adhesive has constant features in order to create high adhesion and friction in the desired direction. These are prepared in the form of wedge shapes. When a shear force is applied, the wedges are bent, and the surface area increases. This produces adhesion as well as friction by van der Waal forces. Furthermore, these wedges have been found to exhibit considerable friction in the reverse direction too. Hence, small areas at the edges of wedges are chosen to reduce friction and adhesion in the reverse direction. By designing spatial variation features, in this experiment, the friction ratio obtained was 100:1, which was much higher compared with other conventional adhesives.
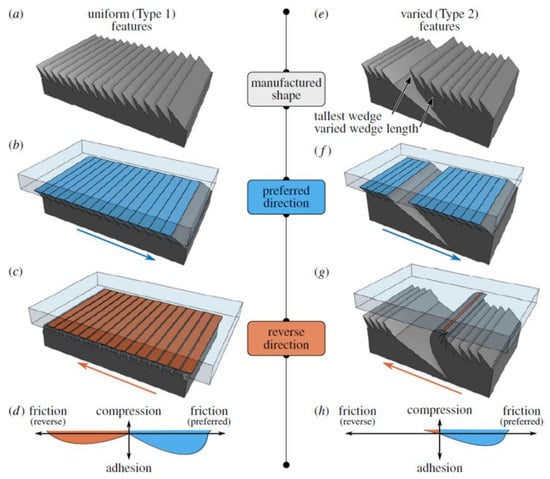
Figure 15.
A contrast between invariable features and a set of features which exhibit one-way friction. Reprinted with permission from [132]. 2019, The Royal Society.
The advantages of this process were (a) an increase in the available area for microstructures, (b) improving the design of microstructures, and (c) helping the adhesive designers to make features that act in one direction in a specific area while the opposite direction in some other area. As an example, an adhesive was developed, which could support a high load when it was loaded in a specific direction and a low load when loaded in the opposite direction (Figure 16).
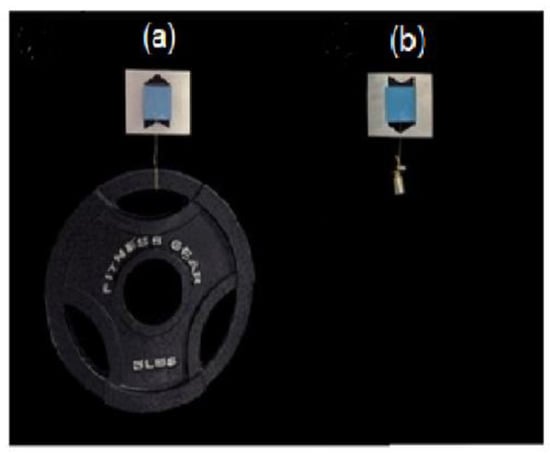
Figure 16.
(a) A 24 × 25 mm patch of spatially variant microstructured gecko-inspired adhesive supports 2.3 kg weight when loaded in the desired direction and (b) supports 22 g in the opposite direction. Reprinted with permission from [132]. 2019, The Royal Society.
In another study, Zhang et al. [133] developed PDMS microfiber surfaces that were fabricated by merging inductively coupled plasma (ICP) and micro-mold cast (Table 6). In this experiment, SYLGARE 184 PDMS was mixed in a ratio of 7.5:1 uniformly; 184-A was used as a base agent and 184-B was used as a curing agent. After the removal of air bubbles, a viscous liquid was poured on the silicon mold and later cross-linked at 60 °C for 24 h. On these materials, rigid fibers with high aspect ratios were developed, which exhibited good friction forces. However, relatively soft materials such as elastomers are generally fabricated with differently shaped tips [172,173,174], e.g., mushroom tip and conical tip, are wedge shaped, and demonstrate high surface energy [175]; they also usually exhibit high normal adhesion strength. By applying the above-mentioned methods, the adhesive properties are enhanced significantly. However, these adhesive surfaces face some limitations. One of the limitations is the adhesive not being able to attach to various counter faces. The reasons might be a lack of finer microstructures, and unwanted mechanical properties of PDMS. Previous studies conducted on the above topic were mainly assumption-based and did not have experimental proof [176,177,178]. From previous studies, it has been observed that surface energy does not have much effect on the gecko’s adhesion ability [111,175]. The main need for these adhesives is to improve their adhesion on different counter surfaces. Hence, it is important to study the effect of counter face roughness and surface energy on adhesion of the artificial gecko-based fabricated surfaces. The fact that gecko-based adhesive surfaces, possessing micro- and nanofibers, exhibit enhanced hydrophobic effects is well known [179]. However, there are only a few studies available which have reported the impact of micro- and nanofiber dimensions on the hydrophobic properties of such adhesives.
Zhang conducted a study in which four different microstructure dimensions were fabricated (Table 6). Table 7 details the diameter (D), center to center distance of microfibers (C), height (H), aspect ratio, and microfiber density of the four samples. Sandpaper with variable surface roughness was used as the counter face surface. In the study, the impacts of roughness and the surface energy of the counter face on the adhesive force of fibrillary structures were studied. The water contact angle (WCA), sliding angle (SA), and wet self-cleaning efficiency of microfiber structures were also studied. It was observed that the fibrillary microstructures exhibited dimensional stability. There was no twisting and damage of the individual fiber. Relative to flat PDMS, these newly fabricated PDMS possessed greater adhesive force when preload was increased. It was noticed that microfiber structures were influenced by the roughness or surface energy of the counter faces. The roughness of the counter face was found to impact the contact area and the interlocking mechanism. The lower dimension of the fibrillary structures of PDMS yielded an increment in the water contact angle and decrement in the sliding angle relative to flat PDMS. One sample amongst the four dimensions fabricated from the PDMS exhibited the highest water contact angle and the lowest sliding angle. The combination of both these properties meant that this sample exhibited super hydrophobicity. The benefit of this sample was that it was able to remove contaminated particles from the microfibers. The four samples were analyzed to investigate their self-cleaning efficiency, as shown in Figure 17.
Table 7.
Designed parameters of the four microfiber surfaces [133].
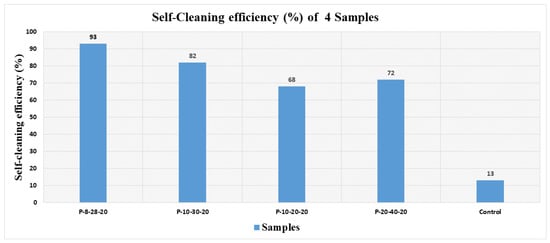
Figure 17.
Self-cleaning efficiency % of 4 different samples of PDMS with respect to the control surface taken in this experiment. Control PDMS sample refers to a flat, unstructured adhesive. Adapted with permission from [133]. 2016, Elsevier.
The obtained microfibers from this experiment exhibited structural stability and no entanglement within themselves. These microfibers also revealed better adhesive force with an increment in preload. Reducing the diameter or enhancing the aspect ratio of these microfibers improved the adhesive forces. The adhesion of microfiber structures was impacted by the roughness or surface energy of counter faces. The counter face possessing the highest surface energy exerted the greatest adhesive force on the microfibers. The microfiber with the highest aspect ratio and microfiber density exhibited the largest WCA and the least SA. This sample exhibited super hydrophobicity in addition to a good wet self-cleaning ability.
Luo et al. [180] incorporated tetramethylpiperidinyloxyl (TEMPO) and polydopamine (PDA) doped into PDMS microstructures using a casting method. These TEMPO–PDA solution mixtures were prepared by doping 0%, 1%, 2%, 3%, and 5% into the PDMS. It was observed that the 5% doped TEMPO–PDA sample provided around 688.75% higher adhesion than the pure PDMS sample. This 5% TEMPO–PDA sample could heat up from 25 °C to 80 °C in a short period of time when exposed to near-infrared (NIR) irradiation. This rise in temperature was observed to reduce the adhesion capability of the sample, and also led to its excellent self-cleaning operation. Table 8 summarizes the progress of gecko-based adhesives with respect to their micro-structure and adhesion properties.
Table 8.
Summary of the relationships between adhesion property and microstructures.
6. On the Future Direction of Materials and Processes
Amongst the different materials used for the fabrication of synthetic adhesives, elastomers are now popular due to their versatility and easy manufacturing [9]. Nowadays, three-dimensional printing (3DP) technology is becoming, more popular. This technology offers rapid prototyping, building complex structures, and spatial resolution [181]. One advantage of 3DP is that it is integrable with computed tomography scanners (CT) [182]. Using CT, high-resolution images can be obtained for nano areas of adhesive. This will help to get a more precise image of fabricated microstructures. Using this technology, sub-micron characteristics can be developed on PDMS [183]. By increasing fibrillary microstructures on PDMS, it thus exhibited easy detachment in wet conditions. New designs on PDMS can be fabricated to increase adhesion. These 3D-printed dielectric elastomers can also be utilized for the fabrication of novel adhesives [184]. Natural geckos contain beta keratin protein; therefore, the 3D-printed dielectric elastomers could be incorporated with this protein in order to closely copy the working of natural gecko adhesion. Moreover, aligned sub-micron keratin microstructures developed by the electrospinning process can be employed for manufacturing new adhesives [185]. Therefore, more studies should be performed on keratin proteins to understand their mechanical properties. Materials possessing similar properties to keratin protein can be studied in detail to find their applicability for fabricating synthetic adhesives [182].
Nanoparticles can also be incorporated into the fabrication of new adhesives to improve their adhesion properties [186]. The addition of silver (Ag) nanoparticles could solve two limitations of new fibrillary adhesives. It can make them resistant to bacterial attack as well as improve their adhesion properties. Nanoparticles, if added to dielectric elastomers, can increase their working strain resistance. The addition of nanoparticles also influences the thermal properties of PDMS polymers. A small percentage of the addition of Ag nanoparticles has been observed to decrease the glass transition temperature of a PDMS elastomer [187]. However, if a high adhesion of PDMS is required at elevated temperatures, they can be fabricated with multi-walled carbon nanotubes [188]. Tian et al. [189] attempted to improve the stiffness of PDMS gecko-based micropillars by incorporating ZrO2 nanoparticles. This helped to restrain the clumping nature of PDMS pillars. They observed that the Young’s modulus of the composite ZrO2 incorporated in the PDMS pillar was significantly enhanced due to the high specific surface area of nano-size fillers. In addition, the same pillar showed high friction force due to the interconnection between hydroxyl groups on the nanoparticle surface and silanol units in PDMS. This study pioneered a technique to enhance the Young’s modulus as well as friction force in the gecko-inspired adhesive. Similarly, other potential nanoparticles can be employed or functionalized in order to provide the adhesives superior performance.
Fibrillary microstructures, if included with electrostatic adhesives, can also modify roughness and improve adhesion [73]. The advantage of using these adhesives is that the adhesion formed by them consumes less power, can be utilized on wet surfaces, and does not cause harm to the surroundings [190]. If any electrostatic element is included in elastomeric adhesives, it can also help in self-cleaning [191]. Different sizes and shapes of fibrillary microstructures can be experimented upon with electrostatic adhesives to modify their roughness and adhesion properties.
Dielectric elastomers have been found to produce manageable actuation in dry adhesion tests as well as wet tests [192,193]. Hence, both actuation and adhesion could be guided by these materials. Additionally, these elastomers could be 3D printed for different shapes [194]. Another set of materials that can be used for the fabrication of synthetic adhesives is hydrogels. These can be manufactured in fibrillary structures and can also work in wet conditions [195]. They are simple to fabricate, often possess anti-bacterial properties, and can stick to versatile surfaces [196].
Optimizing the design of tip shapes of fibrils pertaining to gecko-inspired adhesives is a challenging task. To overcome this limitation, machine learning techniques can be employed to design adhesives that can perform better than those developed conventionally [197].
When employing adhesives for robotic applications, it is important to research new techniques that can provide more superior performances for gecko-inspired robots. New technologies such as electrostatic air spray deposition (EASD) can be employed to create a superior array of micropillars for gecko-inspired adhesives [198]. In this technique, air pressure and magnetic field are employed to create magnetically responsive, adhesion-reversible, superhydrophobic surfaces. This technique does not require the micropillar surface to be chemically modified by special reagents, and hence, is relatively cheaper and faster. Additionally, 3D printing magnetic devices can be employed to fabricate soft, flexible, and magnetic gecko-inspired micro-pillars with superhydrophobic surfaces [199]. The application of force on the micro-pillars can cause shape deformation in the magnetic field distribution, exhibiting the capability to transform mechanical energy to electricity (mechano-electrical conversion). This conversion is possible when the micro-pillars are subjected to consecutive water droplet dripping. Additionally, micro-pillars can be fabricated which are supported by superconducting maglev generators that can convert low frequencies (caused by meteorite impact or geological work) into electricity for space applications [200]. This technique can be employed as an energy supply for gecko-inspired robots pertaining to space applications.
Non-conventional materials which possess good chemical resistance, such as fluorocarbon rubber, are employed for specific industrial applications that involve high temperature and vacuum conditions. Adhesives fabricated from fluorocarbon have been studied and observed to exhibit excellent pull-off force at room temperature as well as at 230 °C [201]. Additionally, these adhesives exhibit stable adhesion under various motions. Hence, this type of adhesive is suitable for the semi-conductor industry and, with further modifications, can be employed in other industries as well. Carbon nanotubes can be used to fabricate dry adhesives for harsh operating conditions. Conventional polymer-based gecko-inspired adhesives degrade over time. This is an important issue for space and vacuum conditions. To overcome this limitation, carbon nanotubes or modified carbon nanofiber material adhesives can be employed for harsh conditions such as space, because these materials exhibit high temperature stability in air as well as in vacuum, and also offer a long lifetime for usage [202].
A combination of gecko-inspired adhesives with other bio-inspired adhesives may lead to the development of superior adhesives. Wang et al. [203] fabricated an adhesive disc for an underwater hitchhiking robot, inspired by remora suckerfish. Here, carbon fiber spinules were fabricated for a soft actuator, using laser machining techniques to mimic the functionality of fish lamellae. The actuator fabricated was observed to generate a pull-off force 340 times greater than the weight of the disc. Additionally, the actuator could stick to a variety of surfaces. Similarly, Sandoval et al. [204] developed an artificial disc inspired by northern clingfish. The adhesive micropillars were fabricated using a molding technique and were observed to achieve significant adhesion force on moderate rough surfaces as well as coarse surfaces under water. Frey et al. [205] fabricated an octopus-inspired switchable adhesive with embedded sensing for underwater applications. The adhesion strength of the fabricated adhesive could be switched on and off over many cycles in a short span of time. Additionally, the design of the fabricated adhesive’s geometry enabled it to adhere to non-ideal surfaces with low pre-load as well as easy detachment. In future, in the design of fish adhesives, octopus-inspired structures could be modified with gecko-inspired structures to fabricate novel efficient adhesives.
7. Summary
In this study, different adhesion mechanisms of gecko-inspired robots were summarized. In addition, the fabrication methods of gecko-inspired synthetic adhesives were highlighted. Gecko-based adhesive research has plenty of scope for development. Especially, improving the adhesive properties for gecko-inspired robots to climb and move on wet and humid surfaces has received considerable attention in recent investigations.
The present study has explained the benefits and limitations of the suction adhesion mechanism. It also highlighted the feasibility of magnetic adhesion in robots and their applications and limitations. An example of a robot is mentioned comprising dry fibrillar adhesives, which could climb on vertical and horizontal surfaces without any preload. Additionally, PSA’s benefits and limitations have been highlighted from the literature. The parameters of tack criteria were explained for dry fibrillary adhesives, which are necessary for adhesives to stick to surfaces. The importance of tip geometry was explained for microstructures in addition to their applications. Microstructured elastomer tape was highlighted as an alternative adhesive that could be reused after fouling. The current study highlights multiple effective mechanisms by which sufficient adhesion could be obtained on a large robot when varying and uneven loads are applied to the robot’s footpad.
Another focus of this study was evaluating elastomeric materials and their significance as adhesives. These materials could adhere to different surfaces and environments, generating considerable adhesion force. The major limitation of elastomeric materials is their easy fouling, which could be substantially overcome by the cleaning process. The importance of adding fibrillar structures to elastomeric materials has been explained, and the benefits of doped elastomers to fabricate microstructured adhesives have been discussed.
The research explains electrostatic adhesion and its benefits for usage in gecko-inspired robots for vacuum and non-vacuum conditions. There is mention of a new field where electrostatic adhesives are combined with microstructured adhesives to provide better adhesion.
The fabrication of thermoplastic adhesives using various materials has been discussed. Combining two different processes of hard template lithography and soft lithography, a new thermoplastic adhesive material was developed which possessed hierarchical micropillar arrays. The significance of the tapering angle for these materials was outlined.
The importance of water and humidity on the adhesion of geckos was another important focus of this study. This led to the fabrication of synthetic adhesives which could function under real environmental conditions. Parameters of contact electrification and capillary forces have been discussed. The concept of the safety factor for the gecko-inspired adhesive system was explained. The dependence of adhesion on temperature and humidity was explained through an example. The importance of relative humidity was introduced and explained with a case study.
The impact of surface roughness on gecko adhesion was described. The impact of asperity sizes on the surface was compared for gecko adhesion. However, limited studies on the variations by which surface roughness impacts gecko adhesion are available thus far. Therefore, the insights on the limitations could help in the future design of better adhesives.
Inspired by the rapid attachment and detachment of gecko toe pads, the paper showcased examples of the recent development of synthetic adhesives. The concept of switchable adhesives was introduced, which helped to improve the performance of the newly fabricated adhesives. The notion of variation in wrinkles and the stretching of adhesives was discussed. Adhesives prepared from shape memory polymers were explained by a few examples.
Several superhydrophobic adhesive surfaces with shape memory properties which had been developed were discussed. The impacts of temperature and preload on shape-memory-based adhesives were explained through a case study. A combination of shape memory polymers and shape memory alloys was discussed to fabricate superior adhesives. Alternate materials to PDMS were explained where carbon fiber composite materials were added to PDMS, resulting in far superior adhesive properties.
The discussion was extended with novel fabrication techniques based on contemporary research. Employing laser cutting technology, many PDMS samples of different shapes were fabricated to develop new adhesive materials. Additionally, the advantages of the twisting ends of a dry adhesive were discussed for processes of easy detachment from the substrate surface. The usage of the oxygen plasma process on silicon elastomers and PDMS to improve the adhesive strength of the newly formed adhesive was summarized. Three-dimensional laser writing on a light-sensitive material could help in the fabrication of adhesives with random shapes and lower size resolutions. The dip transfer process was employed on a 3D-printed mold to develop an adhesive with fibrillary hair structures at a nanoresolution size. The dual-scale electron beam lithography process to fabricate advanced adhesives was summarized in this review. The electrospinning process, in addition to the template wetting process on PVDF to develop new hierarchical structures, was discussed.
The authors believe more studies should be carried out on modifying the microstructures of adhesives. Interdisciplinary fields of material science and electrical engineering will play a pivotal role in the synthesis and application of gecko-based adhesives.
Author Contributions
Conceptualization, S.S. and P.L.M.; methodology, S.S., M.H.R. and A.S.; software, S.S.; validation, S.S., M.H.R. and A.S.; formal analysis, S.S., M.H.R. and A.S.; investigation, S.S. and M.H.R.; resources, S.S. and M.H.R.; data curation, S.S., M.H.R. and A.S.; writing—original draft preparation, S.S. and M.H.R.; writing—review and editing, S.S., M.H.R., A.S. and P.L.M.; visualization, A.S. and P.L.M.; supervision, A.S. and P.L.M.; project administration, S.S., M.H.R. and A.S.; funding acquisition, Not Applicable. All authors have read and agreed to the published version of the manuscript.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
This article does not contain any studies with animal subjects performed by any of the authors.
Data Availability Statement
Copyright permission for the figures used has been obtained and is acknowledged.
Acknowledgments
The authors would like to thank Amanendra Kushwaha from the Department of Mechanical Engineering at the University of Nevada, Reno, for help with editing the images and tables of the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| PU | Polyurethane |
| DPS | Directional polymer stacks |
| PET | Polyethylene terephthalate |
| PEN | Polyethylenenaphthalate |
| PPS | Polyphenylene sulfide |
| PI | Polyimide |
| SEBS | Styrene–ethylene/butylene–styrene |
| TPE | Thermoplastic elastomer |
| V-10 | Vytaflex-10 |
| PDMS | Polydimethylsiloxane |
| CPL | Conventional photolithograph |
| CFL | Capillary force lithography |
| PVDF | Polyvinylidene fluoride |
| PTFE | Polytetrafluoroethylene |
| TBCP | Timing-belt-based climbing platform |
| PSA | Pressure-sensitive adhesive |
| PMMA | Polymethyl methacrylate |
| ABS | Acrylonitrile butadiene styrene |
| CNT | Carbon nanotube |
| XPS | X-ray photoelectron spectroscopy |
| LDPE | Low-density polyethylene |
| RH | Relative humidity |
| AFM | Atomic force microscopy |
| PVC | Polyvinyl Chloride |
| SMP | Shape memory polymer |
| SMA | Shape memory alloy |
| PSS | Pressure switchable system |
| REM | Replica molding |
| AAO | Anodic aluminum oxide |
| SEM | Scanning electron microscopy |
References
- Federle, W.; Barnes, W.; Baumgartner, W.; Drechsler, P.; Smith, J. Wet but not slippery: Boundary friction in tree frog adhesive toe pads. J. R. Soc. Interface 2006, 3, 689–697. [Google Scholar] [CrossRef] [PubMed]
- Opell, B.D. The material cost and stickiness of capture threads and the evolution of orb-weaving spiders. Biol. J. Linn. Soc. 1997, 62, 443–458. [Google Scholar] [CrossRef]
- Russell, A.; Bels, V. Biomechanics and kinematics of limb-based locomotion in lizards: Review, synthesis and prospectus. Comp. Biochem. Physiol. Part A Mol. Integr. Physiol. 2001, 131, 89–112. [Google Scholar] [CrossRef] [PubMed]
- Vincent, J.F.; Bogatyreva, O.A.; Bogatyrev, N.R.; Bowyer, A.; Pahl, A.-K. Biomimetics: Its practice and theory. J. R. Soc. Interface 2006, 3, 471–482. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Liang, Y.A.; Hsieh, S.T.; Zesch, W.; Chan, W.P.; Kenny, T.W.; Fearing, R.; Full, R.J. Adhesive force of a single gecko foot-hair. Nature 2000, 405, 681. [Google Scholar] [CrossRef]
- Autumn, K.; Hsieh, S.; Dudek, D.; Chen, J.; Chitaphan, C.; Full, R. Dynamics of geckos running vertically. J. Exp. Biol. 2006, 209, 260–272. [Google Scholar] [CrossRef]
- Autumn, K.; Dittmore, A.; Santos, D.; Spenko, M.; Cutkosky, M. Frictional adhesion: A new angle on gecko attachment. J. Exp. Biol. 2006, 209, 3569–3579. [Google Scholar] [CrossRef]
- Autumn, K.; Majidi, C.; Groff, R.; Dittmore, A.; Fearing, R. Effective elastic modulus of isolated gecko setal arrays. J. Exp. Biol. 2006, 209, 3558–3568. [Google Scholar] [CrossRef]
- Kasar, A.K.; Ramachandran, R.; Menezes, P.L. Natural Adhesion System Leads to Synthetic Adhesives. J. Bio-Tribo-Corros. 2018, 4, 43. [Google Scholar] [CrossRef]
- Russell, A.P. Integrative Functional Morphology of the Gekkotan Adhesive System (Reptilia: Gekkota). Integr. Comp. Biol. 2002, 42, 1154–1163. [Google Scholar] [CrossRef]
- Autumn, K. Biological Adhesives; Springer: Berlin/Heidelberg, Germany, 2006; pp. 225–255. [Google Scholar]
- Autumn, K.; Puthoff, J. Properties, Principles, and Parameters of the Gecko Adhesive System. In Biological Adhesives; Springer: Berlin/Heidelberg, Germany, 2016; pp. 245–280. [Google Scholar]
- Prowse, M.S.; Wilkinson, M.; Puthoff, J.B.; Mayer, G.; Autumn, K. Effects of humidity on the mechanical properties of gecko setae. Acta Biomater. 2011, 7, 733–738. [Google Scholar] [CrossRef] [PubMed]
- Pesika, N.S.; Zeng, H.; Kristiansen, K.; Zhao, B.; Tian, Y.; Autumn, K.; Israelachvili, J. Gecko adhesion pad: A smart surface? J. Phys. Condens. Matter 2009, 21, 464132. [Google Scholar] [CrossRef] [PubMed]
- Stark, A.Y.; Mitchell, C.T. Stick or slip: Adhesive performance of geckos and gecko-inspired synthetics in wet environments. Integr. Comp. Biol. 2019, 59, 214–226. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Chary, S.; Das, S.; Tamelier, J.; Pesika, N.S.; Turner, K.L.; Israelachvili, J.N. Gecko-inspired dry adhesive for robotic applications. Adv. Funct. Mater. 2011, 21, 3010–3018. [Google Scholar] [CrossRef]
- Modabberifar, M.; Spenko, M. A shape memory alloy-actuated gecko-inspired robotic gripper. Sens. Actuators A Phys. 2018, 276, 76–82. [Google Scholar] [CrossRef]
- Ruffatto, D.; Glick, P.E.; Tolley, M.T.; Parness, A. Long-duration surface anchoring with a hybrid electrostatic and gecko-inspired adhesive. IEEE Robot. Autom. Lett. 2018, 3, 4201–4208. [Google Scholar] [CrossRef]
- Murphy, M.P.; Kute, C.; Mengüç, Y.; Sitti, M. Waalbot II: Adhesion recovery and improved performance of a climbing robot using fibrillar adhesives. Int. J. Robot. Res. 2011, 30, 118–133. [Google Scholar] [CrossRef]
- Jiang, H.; Hawkes, E.W.; Fuller, C.; Estrada, M.A.; Suresh, S.A.; Abcouwer, N.; Han, A.K.; Wang, S.; Ploch, C.J.; Parness, A. A robotic device using gecko-inspired adhesives can grasp and manipulate large objects in microgravity. Sci. Robot. 2017, 2, eaan4545. [Google Scholar] [CrossRef]
- Tao, D.; Gao, X.; Lu, H.; Liu, Z.; Li, Y.; Tong, H.; Pesika, N.; Meng, Y.; Tian, Y. Controllable anisotropic dry adhesion in vacuum: Gecko inspired wedged surface fabricated with ultraprecision diamond cutting. Adv. Funct. Mater. 2017, 27, 1606576. [Google Scholar] [CrossRef]
- Silva, M.F.; Machado, J.T.; Tar, J.K. A survey of technologies for climbing robots adhesion to surfaces. In Proceedings of the 2008 IEEE International Conference on Computational Cybernetics, Stara Lesna, Slovakia, 27–29 November 2008; IEEE: New York, NY, USA, 2008; pp. 127–132. [Google Scholar]
- Menon, C.; Murphy, M.; Sitti, M. Gecko inspired surface climbing robots. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; IEEE: New York, NY, USA, 2004; pp. 431–436. [Google Scholar]
- Asbeck, A.T.; Kim, S.; McClung, A.; Parness, A.; Cutkosky, M.R. Climbing Walls with Microspines. In Robotics and Automation Society; IEEE: New York, NY, USA, 2006. [Google Scholar]
- Park, S.; Jeong, H.D.; Lim, Z.S. Design of a mobile robot system for automatic integrity evaluation of large size reservoirs and pipelines in industrial fields. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003)(Cat. No. 03CH37453), Las Vegas, NV, USA, 27 October–1 November 2003; IEEE: New York, NY, USA, 2003; pp. 2618–2623. [Google Scholar]
- Shen, W.; Gu, J.; Shen, Y. Permanent magnetic system design for the wall-climbing robot. Appl. Bionics Biomech. 2006, 3, 151–159. [Google Scholar] [CrossRef]
- Shores, B.E.; Minor, M.A. Design, kinematic analysis, and quasi-steady control of a morphic rolling disk biped climbing robot. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: New York, NY, USA, 2005; pp. 2721–2726. [Google Scholar]
- Krahn, J.; Liu, Y.; Sadeghi, A.; Menon, C. A tailless timing belt climbing platform utilizing dry adhesives with mushroom caps. Smart Mater. Struct. 2011, 20, 115021. [Google Scholar] [CrossRef]
- Daltorio, K.A.; Horchler, A.D.; Gorb, S.; Ritzmann, R.E.; Quinn, R.D. A small wall-walking robot with compliant, adhesive feet. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; IEEE: New York, NY, USA, 2005; pp. 3648–3653. [Google Scholar]
- Unver, O.; Murphy, M.; Sitti, M. Geckobot and Waalbot: Small-Scale Wall Climbing Robots; Infotech@Aerospace: Arlington, Virginia, 2005; p. 6940. [Google Scholar]
- Peressadko, A.; Gorb, S.N. When less is more: Experimental evidence for tenacity enhancement by division of contact area. J. Adhes. 2004, 80, 247–261. [Google Scholar] [CrossRef]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth vertical surface climbing with directional adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Gao, H.; Wang, X.; Yao, H.; Gorb, S.; Arzt, E. Mechanics of hierarchical adhesion structures of geckos. Mech. Mater. 2005, 37, 275–285. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Eason, E.V.; Asbeck, A.T.; Cutkosky, M.R. The gecko’s toe: Scaling directional adhesives for climbing applications. IEEE/ASME Trans. Mechatron. 2012, 18, 518–526. [Google Scholar] [CrossRef]
- Persson, B.; Gorb, S. The effect of surface roughness on the adhesion of elastic plates with application to biological systems. J. Chem. Phys. 2003, 119, 11437–11444. [Google Scholar] [CrossRef]
- Unver, O.; Sitti, M. Tankbot: A palm-size, tank-like climbing robot using soft elastomer adhesive treads. Int. J. Robot. Res. 2010, 29, 1761–1777. [Google Scholar] [CrossRef]
- Callow, M.E.; Fletcher, R.L. The influence of low surface energy materials on bioadhesion—A review. Int. Biodeterior. Biodegrad. 1994, 34, 333–348. [Google Scholar] [CrossRef]
- Wolf, M.P.; Salieb-Beugelaar, G.B.; Hunziker, P. PDMS with designer functionalities—Properties, modifications strategies, and applications. Prog. Polym. Sci. 2018, 83, 97–134. [Google Scholar] [CrossRef]
- Simaite, A.; Spenko, M. Evaluation of silicone elastomers as structural materials for microstructured adhesives. Bioinspir. Biomim. 2019, 14, 046005. [Google Scholar] [CrossRef]
- Chen, R. A gecko-inspired electroadhesive wall-climbing robot. IEEE Potentials 2015, 34, 15–19. [Google Scholar] [CrossRef]
- Asano, K.; Hatakeyama, F.; Yatsuzuka, K. Fundamental study of an electrostatic chuck for silicon wafer handling. IEEE Trans. Ind. Appl. 2002, 38, 840–845. [Google Scholar] [CrossRef]
- Prahlad, H.; Pelrine, R.; Stanford, S.; Marlow, J.; Kornbluh, R. Electroadhesive robots—Wall climbing robots enabled by a novel, robust, and electrically controllable adhesion technology. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; IEEE: New York, NY, USA, 2008; pp. 3028–3033. [Google Scholar]
- Dadkhah, M.; Ruffatto, D., III; Zhao, Z.; Spenko, M. Increasing adhesion via a new electrode design and improved manufacturing in electrostatic/microstructured adhesives. J. Electrost. 2018, 91, 48–55. [Google Scholar] [CrossRef]
- Ruffatto, D., III; Shah, J.; Spenko, M. Increasing the adhesion force of electrostatic adhesives using optimized electrode geometry and a novel manufacturing process. J. Electrost. 2014, 72, 147–155. [Google Scholar] [CrossRef]
- Khaled, W.B.; Sameoto, D. Fabrication and characterization of thermoplastic elastomer dry adhesives with high strength and low contamination. ACS Appl. Mater. Interfaces 2014, 6, 6806–6815. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Chung, Y.; Tsao, A.; Maboudian, R. Tuning micropillar tapering for optimal friction performance of thermoplastic gecko-inspired adhesive. ACS Appl. Mater. Interfaces 2014, 6, 6936–6943. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, C.T.; Yang, S. Fabrication of hierarchical pillar arrays from thermoplastic and photosensitive SU-8. Small 2010, 6, 768–775. [Google Scholar] [CrossRef]
- Bhushan, B. Encyclopedia of Nanotechnology; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Li, X.; Tao, D.; Lu, H.; Bai, P.; Liu, Z.; Ma, L.; Meng, Y.; Tian, Y. Recent developments in gecko-inspired dry adhesive surfaces from fabrication to application. Surf. Topogr. Metrol. Prop. 2019, 7, 023001. [Google Scholar] [CrossRef]
- Israelachvili, J. Intermolecular and Surface Forces, 2nd ed.; Academic: New York, NY, USA, 1992. [Google Scholar]
- Jeong, H.E.; Suh, K.Y. Nanohairs and nanotubes: Efficient structural elements for gecko-inspired artificial dry adhesives. Nano Today 2009, 4, 335–346. [Google Scholar] [CrossRef]
- Arzt, E.; Gorb, S.; Spolenak, R. From micro to nano contacts in biological attachment devices. Proc. Natl. Acad. Sci. USA 2003, 100, 10603–10606. [Google Scholar] [CrossRef]
- Kim, S.; Sitti, M. Biologically inspired polymer microfibers with spatulate tips as repeatable fibrillar adhesives. Appl. Phys. Lett. 2006, 89, 261911. [Google Scholar] [CrossRef]
- Bartlett, M.D.; Croll, A.B.; King, D.R.; Paret, B.M.; Irschick, D.J.; Crosby, A.J. Looking beyond fibrillar features to scale gecko-like adhesion. Adv. Mater. 2012, 24, 1078–1083. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Ulmen, J.; Esparza, N.; Cutkosky, M.R. Scaling walls: Applying dry adhesives to the real world. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: New York, NY, USA, 2011; pp. 5100–5106. [Google Scholar]
- Murphy, M.P.; Sitti, M. Waalbot: An agile small-scale wall-climbing robot utilizing dry elastomer adhesives. IEEE/ASME Trans. Mechatron. 2007, 12, 330–338. [Google Scholar] [CrossRef]
- Ebnesajjad, S. Characteristics of Adhesive Materials. In Handbook of Adhesives and Surface Preparation; Elsevier: Amsterdam, The Netherlands, 2011; pp. 137–183. [Google Scholar]
- Unver, O.; Sitti, M. Flat dry elastomer adhesives as attachment materials for climbing robots. IEEE Trans. Robot. 2009, 26, 131–141. [Google Scholar] [CrossRef]
- Glass, P.; Chung, H.; Washburn, N.R.; Sitti, M. Enhanced reversible adhesion of dopamine methacrylamide-coated elastomer microfibrillar structures under wet conditions. Langmuir 2009, 25, 6607–6612. [Google Scholar] [CrossRef] [PubMed]
- Tang, T.; Hui, C.-Y.; Glassmaker, N.J. Can a fibrillar interface be stronger and tougher than a non-fibrillar one? J. R. Soc. Interface 2005, 2, 505–516. [Google Scholar] [CrossRef]
- Gay, C. Stickiness—Some fundamentals of adhesion. Integr. Comp. Biol. 2002, 42, 1123–1126. [Google Scholar] [CrossRef]
- Persson, B.; Tosatti, E. The effect of surface roughness on the adhesion of elastic solids. J. Chem. Phys. 2001, 115, 5597–5610. [Google Scholar] [CrossRef]
- Sitti, M.; Fearing, R.S. Synthetic gecko foot-hair micro/nano-structures as dry adhesives. J. Adhes. Sci. Technol. 2003, 17, 1055–1073. [Google Scholar] [CrossRef]
- Hansen, W.R.; Autumn, K. Evidence for self-cleaning in gecko setae. Proc. Natl. Acad. Sci. USA 2005, 102, 385–389. [Google Scholar] [CrossRef]
- Lee, J.; Fearing, R.S. Contact Self-Cleaning of Synthetic Gecko Adhesive from Polymer Microfibers. Langmuir 2008, 24, 10587–10591. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Cheung, E.; Sitti, M. Wet self-cleaning of biologically inspired elastomer mushroom shaped microfibrillar adhesives. Langmuir 2009, 25, 7196–7199. [Google Scholar] [CrossRef] [PubMed]
- Akhtar, M.N.; Itani, R.Y. Predicting damping of semi-rigid glued T-beams. Wood Fiber Sci. 2007, 19, 26–36. [Google Scholar]
- Monkman, G. Electroadhesive microgrippers. Ind. Robot. Int. J. 2003, 30, 326–330. [Google Scholar] [CrossRef]
- Monkman, G.J. An analysis of astrictive prehension. Int. J. Robot. Res. 1997, 16, 1–10. [Google Scholar] [CrossRef]
- Ruffatto, D.; Shah, J.; Spenko, M. Optimization and experimental validation of electrostatic adhesive geometry. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; IEEE: New York, NY, USA, 2013; pp. 1–8. [Google Scholar]
- Berengueres, J.; Urago, M.; Saito, S.; Tadakuma, K.; Meguro, H. Gecko inspired electrostatic chuck. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; IEEE: New York, NY, USA, 2006; pp. 1018–1023. [Google Scholar]
- Krahn, J.; Menon, C. Electro-dry-adhesion. Langmuir 2012, 28, 5438–5443. [Google Scholar] [CrossRef] [PubMed]
- Ruffatto, D., III; Parness, A.; Spenko, M. Improving controllable adhesion on both rough and smooth surfaces with a hybrid electrostatic/gecko-like adhesive. J. R. Soc. Interface 2014, 11, 20131089. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Z.; Li, Y.; Dai, Z. Electrostatic attraction caused by triboelectrification in climbing geckos. Friction 2022, 10, 44–53. [Google Scholar] [CrossRef]
- Belingardi, G.; Brunella, V.; Martorana, B.; Ciardiello, R. Thermoplastic Adhesive for Automotive Applications; Intech: Rijeka, Croatia, 2016; Volume 1. [Google Scholar]
- Kwak, M.K.; Jeong, H.E.; Bae, W.G.; Jung, H.S.; Suh, K.Y. Anisotropic adhesion properties of triangular-tip-shaped micropillars. Small 2011, 7, 2296–2300. [Google Scholar] [CrossRef]
- Sameoto, D.; Menon, C. Direct molding of dry adhesives with anisotropic peel strength using an offset lift-off photoresist mold. J. Micromech. Microeng. 2009, 19, 115026. [Google Scholar] [CrossRef]
- Lee, D.H.; Kim, Y.; Fearing, R.S.; Maboudian, R. Effect of fiber geometry on macroscale friction of ordered low-density polyethylene nanofiber arrays. Langmuir 2011, 27, 11008–11016. [Google Scholar] [CrossRef] [PubMed]
- Greiner, C.; del Campo, A.; Arzt, E. Adhesion of bioinspired micropatterned surfaces: Effects of pillar radius, aspect ratio, and preload. Langmuir 2007, 23, 3495–3502. [Google Scholar] [CrossRef] [PubMed]
- Aksak, B.; Murphy, M.P.; Sitti, M. Adhesion of biologically inspired vertical and angled polymer microfiber arrays. Langmuir 2007, 23, 3322–3332. [Google Scholar] [CrossRef]
- Lee, J.; Fearing, R.S.; Komvopoulos, K. Directional adhesion of gecko-inspired angled microfiber arrays. Appl. Phys. Lett. 2008, 93, 191910. [Google Scholar] [CrossRef]
- del Campo, A.; Greiner, C.; Alvarez, I.; Arzt, E. Patterned surfaces with pillars with controlled 3D tip geometry mimicking bioattachment devices. Adv. Mater. 2007, 19, 1973–1977. [Google Scholar] [CrossRef]
- Murphy, M.P.; Aksak, B.; Sitti, M. Gecko-inspired directional and controllable adhesion. Small 2009, 5, 170–175. [Google Scholar] [CrossRef]
- Greiner, C.; Arzt, E.; Del Campo, A. Hierarchical gecko-like adhesives. Adv. Mater. 2009, 21, 479–482. [Google Scholar] [CrossRef]
- Zhang, P.; Liu, S.; Lv, H. Fabrication and Properties of Dual-Level Hierarchical Structures Mimicking Gecko Foot Hairs. J. Nanosci. Nanotechnol. 2013, 13, 781–786. [Google Scholar] [CrossRef][Green Version]
- Boesel, L.F.; Greiner, C.; Arzt, E.; Del Campo, A. Gecko-inspired surfaces: A path to strong and reversible dry adhesives. Adv. Mater. 2010, 22, 2125–2137. [Google Scholar] [CrossRef]
- Sameoto, D.; Menon, C. Recent advances in the fabrication and adhesion testing of biomimetic dry adhesives. Smart Mater. Struct. 2010, 19, 103001. [Google Scholar] [CrossRef]
- Hoang, T.T.; Quek, J.J.S.; Thai, M.T.; Phan, P.T.; Lovell, N.H.; Do, T.N. Soft robotic fabric gripper with gecko adhesion and variable stiffness. Sens. Actuators A Phys. 2021, 323, 112673. [Google Scholar] [CrossRef]
- Bergmann, P.J.; Irschick, D.J. Effects of temperature on maximum clinging ability in a diurnal gecko: Evidence for a passive clinging mechanism? J. Exp. Zool. Part A Comp. Exp. Biol. 2005, 303, 785–791. [Google Scholar] [CrossRef] [PubMed]
- Niewiarowski, P.H.; Lopez, S.; Ge, L.; Hagan, E.; Dhinojwala, A. Sticky gecko feet: The role of temperature and humidity. PLoS ONE 2008, 3, e2192. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Yang, Y.; Chen, S. Coupled effects of the temperature and the relative humidity on gecko adhesion. J. Phys. D Appl. Phys. 2017, 50, 315402. [Google Scholar] [CrossRef]
- Niewiarowski, P.H.; Stark, A.Y.; Dhinojwala, A. Sticking to the story: Outstanding challenges in gecko-inspired adhesives. J. Exp. Biol. 2016, 219, 912–919. [Google Scholar] [CrossRef]
- Stark, A.Y.; Klittich, M.R.; Sitti, M.; Niewiarowski, P.H.; Dhinojwala, A. The effect of temperature and humidity on adhesion of a gecko-inspired adhesive: Implications for the natural system. Sci. Rep. 2016, 6, 30936. [Google Scholar] [CrossRef] [PubMed]
- Shuttleworth, I. On the role of the van der Waals interaction in gecko adhesion: A DFT perspective. Results Mater. 2020, 6, 100080. [Google Scholar] [CrossRef]
- Izadi, H.; Stewart, K.M.; Penlidis, A. Role of contact electrification and electrostatic interactions in gecko adhesion. J. R. Soc. Interface 2014, 11, 20140371. [Google Scholar] [CrossRef]
- Badge, I.; Stark, A.Y.; Paoloni, E.L.; Niewiarowski, P.H.; Dhinojwala, A. The role of surface chemistry in adhesion and wetting of gecko toe pads. Sci. Rep. 2014, 4, 6643. [Google Scholar] [CrossRef]
- Huber, G.; Mantz, H.; Spolenak, R.; Mecke, K.; Jacobs, K.; Gorb, S.N.; Arzt, E. Evidence for capillarity contributions to gecko adhesion from single spatula nanomechanical measurements. Proc. Natl. Acad. Sci. USA 2005, 102, 16293–16296. [Google Scholar] [CrossRef]
- Sun, W.; Neuzil, P.; Kustandi, T.S.; Oh, S.; Samper, V.D. The nature of the gecko lizard adhesive force. Biophys. J. 2005, 89, L14–L17. [Google Scholar] [CrossRef] [PubMed]
- Puthoff, J.B.; Prowse, M.S.; Wilkinson, M.; Autumn, K. Changes in materials properties explain the effects of humidity on gecko adhesion. J. Exp. Biol. 2010, 213, 3699–3704. [Google Scholar] [CrossRef] [PubMed]
- Tan, D.; Luo, A.; Wang, X.; Shi, Z.; Lei, Y.; Steinhart, M.; Kovalev, A.; Gorb, S.N.; Turner, K.T.; Xue, L. Humidity-modulated core–shell nanopillars for enhancement of gecko-inspired adhesion. ACS Appl. Nano Mater. 2020, 3, 3596–3603. [Google Scholar] [CrossRef]
- Leckband, D.; Chen, Y.L.; Israelachvili, J.; Wickman, H.H.; Fletcher, M.; Zimmerman, R. Measurements of conformational changes during adhesion of lipid and protein (polylysine and S-layer) surfaces. Biotechnol. Bioeng. 1993, 42, 167–177. [Google Scholar] [CrossRef]
- Huber, G.; Gorb, S.N.; Hosoda, N.; Spolenak, R.; Arzt, E. Influence of surface roughness on gecko adhesion. Acta Biomater. 2007, 3, 607–610. [Google Scholar] [CrossRef]
- Fuller, K.; Tabor, D. The effect of surface roughness on the adhesion of elastic solids. Proc. R. Soc. Lond. A Math. Phys. Sci. 1975, 345, 327–342. [Google Scholar]
- Peressadko, A.; Hosoda, N.; Persson, B. Influence of surface roughness on adhesion between elastic bodies. Phys. Rev. Lett. 2005, 95, 124301. [Google Scholar] [CrossRef]
- Persson, B. On the mechanism of adhesion in biological systems. J. Chem. Phys. 2003, 118, 7614–7621. [Google Scholar] [CrossRef]
- Niewiarowski, P.H.; Dhinojwala, A.; Garner, A.M. A physical model approach to gecko adhesion opportunity and constraint: How rough could it be? Integr. Comp. Biol. 2019, 59, 203–213. [Google Scholar] [CrossRef]
- Brodoceanu, D.; Bauer, C.; Kroner, E.; Arzt, E.; Kraus, T. Hierarchical bioinspired adhesive surfaces—A review. Bioinspiration Biomim. 2016, 11, 051001. [Google Scholar] [CrossRef]
- Ye, Z.; Lum, G.Z.; Song, S.; Rich, S.; Sitti, M. Phase change of gallium enables highly reversible and switchable adhesion. Adv. Mater. 2016, 28, 5088–5092. [Google Scholar] [CrossRef] [PubMed]
- Drotlef, D.M.; Amjadi, M.; Yunusa, M.; Sitti, M. Bioinspired composite microfibers for skin adhesion and signal amplification of wearable sensors. Adv. Mater. 2017, 29, 1701353. [Google Scholar] [CrossRef] [PubMed]
- Tan, D.; Wang, X.; Liu, Q.; Shi, K.; Yang, B.; Liu, S.; Wu, Z.S.; Xue, L. Switchable adhesion of micropillar adhesive on rough surfaces. Small 2019, 15, 1904248. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Sitti, M.; Liang, Y.A.; Peattie, A.M.; Hansen, W.R.; Sponberg, S.; Kenny, T.W.; Fearing, R.; Israelachvili, J.N.; Full, R.J. Evidence for van der Waals adhesion in gecko setae. Proc. Natl. Acad. Sci. USA 2002, 99, 12252–12256. [Google Scholar] [CrossRef] [PubMed]
- Geim, A.K.; Dubonos, S.; Grigorieva, I.; Novoselov, K.; Zhukov, A.; Shapoval, S.Y. Microfabricated adhesive mimicking gecko foot-hair. Nat. Mater. 2003, 2, 461–463. [Google Scholar] [CrossRef]
- Gorb, S.; Varenberg, M.; Peressadko, A.; Tuma, J. Biomimetic mushroom-shaped fibrillar adhesive microstructure. J. R. Soc. Interface 2007, 4, 271–275. [Google Scholar] [CrossRef]
- Kwak, M.K.; Pang, C.; Jeong, H.E.; Kim, H.N.; Yoon, H.; Jung, H.S.; Suh, K.Y. Towards the next level of bioinspired dry adhesives: New designs and applications. Adv. Funct. Mater. 2011, 21, 3606–3616. [Google Scholar] [CrossRef]
- Yurdumakan, B.; Raravikar, N.R.; Ajayan, P.M.; Dhinojwala, A. Synthetic gecko foot-hairs from multiwalled carbon nanotubes. Chem. Commun. 2005, 3799–3801. [Google Scholar] [CrossRef]
- Jeong, H.E.; Lee, J.-K.; Kim, H.N.; Moon, S.H.; Suh, K.Y. A nontransferring dry adhesive with hierarchical polymer nanohairs. Proc. Natl. Acad. Sci. USA 2009, 106, 5639–5644. [Google Scholar] [CrossRef]
- Peattie, A.M.; Majidi, C.; Corder, A.; Full, R.J. Ancestrally high elastic modulus of gecko setal β-keratin. J. R. Soc. Interface 2007, 4, 1071–1076. [Google Scholar] [CrossRef]
- Spolenak, R.; Gorb, S.; Arzt, E. Adhesion design maps for bio-inspired attachment systems. Acta Biomater. 2005, 1, 5–13. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Zhao, A.; Jiang, R.; Wang, D.; Li, D.; Guo, H.; Tao, W.; Gan, Z.; Zhang, M. Regulation of the elastic modulus of polyurethane microarrays and its influence on gecko-inspired dry adhesion. Appl. Surf. Sci. 2011, 257, 3336–3340. [Google Scholar] [CrossRef]
- Del Campo, A.; Greiner, C.; Arzt, E. Contact shape controls adhesion of bioinspired fibrillar surfaces. Langmuir 2007, 23, 10235–10243. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.I.; Jeong, H.E.; Suh, K.Y.; Lee, H.H. Stooped nanohairs: Geometry-controllable, unidirectional, reversible, and robust gecko-like dry adhesive. Adv. Mater. 2009, 21, 2276–2281. [Google Scholar] [CrossRef]
- Micciché, M.; Arzt, E.; Kroner, E. Single macroscopic pillars as model system for bioinspired adhesives: Influence of tip dimension, aspect ratio, and tilt angle. ACS Appl. Mater. Interfaces 2014, 6, 7076–7083. [Google Scholar] [CrossRef]
- Carbone, G.; Pierro, E. Effect of interfacial air entrapment on the adhesion of bio-inspired mushroom-shaped micro-pillars. Soft Matter 2012, 8, 7904–7908. [Google Scholar] [CrossRef]
- Kang, O.H.; Lee, S.H.; Yun, J.H.; Yi, H.; Kwak, M.K.; Lee, S.R. Adhesion tunable bio-inspired dry adhesives by twisting. Int. J. Precis. Eng. Manuf. 2017, 18, 1433–1437. [Google Scholar] [CrossRef]
- Simaite, A.; Karimi, M.A.; Spenko, M. Crosslinker and catalyst as silicone elastomer bonding enhancers: Applications to fabrication of hybrid electrostatic/gecko-like adhesives. J. Micromechanics Microengineering 2019, 29, 077001. [Google Scholar] [CrossRef]
- Röhrig, M.; Thiel, M.; Worgull, M.; Hölscher, H. 3D direct laser writing of nano-and microstructured hierarchical gecko-mimicking surfaces. Small 2012, 8, 3009–3015. [Google Scholar] [CrossRef]
- Murphy, M.P.; Kim, S.; Sitti, M. Enhanced adhesion by gecko-inspired hierarchical fibrillar adhesives. ACS Appl. Mater. Interfaces 2009, 1, 849–855. [Google Scholar] [CrossRef]
- Milionis, A.; Noyes, C.; Loth, E.; Bayer, I.; Lichtenberger, A.; Stathopoulos, V.; Vourdas, N. Water-repellent approaches for 3-D printed internal passages. Mater. Manuf. Process. 2016, 31, 1162–1170. [Google Scholar] [CrossRef]
- Feng, J.; Tuominen, M.T.; Rothstein, J.P. Hierarchical superhydrophobic surfaces fabricated by dual-scale electron-beam-lithography with well-ordered secondary nanostructures. Adv. Funct. Mater. 2011, 21, 3715–3722. [Google Scholar] [CrossRef]
- Davoudinejad, A.; Ribo, M.; Pedersen, D.; Islam, A.; Tosello, G. Direct fabrication of bio-inspired gecko-like geometries with vat polymerization additive manufacturing method. J. Micromechanics Microengineering 2018, 28, 085009. [Google Scholar] [CrossRef]
- Sahay, R.; Parveen, H.; Baji, A.; Ganesh, V.A.; Ranganath, A.S. Fabrication of PVDF hierarchical fibrillar structures using electrospinning for dry-adhesive applications. J. Mater. Sci. 2017, 52, 2435–2441. [Google Scholar] [CrossRef]
- Suresh, S.A.; Kerst, C.F.; Cutkosky, M.R.; Hawkes, E.W. Spatially variant microstructured adhesive with one-way friction. J. R. Soc. Interface 2019, 16, 20180705. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, S.; Cheng, X.; Gao, X.; Guo, X. Fabrication and characterization of gecko-inspired dry adhesion, superhydrophobicity and wet self-cleaning surfaces. J. Bionic Eng. 2016, 13, 132–142. [Google Scholar] [CrossRef]
- Pelrine, R.; Pei, Q.; Kornbluh, R. Dielectric elastomers: Past, present, and potential future. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XX, Denver, CO, USA, 27 March 2018; International Society for Optics and Photonics: San Diego, CA, USA, 2018; p. 1059406. [Google Scholar]
- Madsen, F.B.; Daugaard, A.E.; Hvilsted, S.; Skov, A.L. The current state of silicone-based dielectric elastomer transducers. Macromol. Rapid Commun. 2016, 37, 378–413. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Park, S.; Mondal, K.; Treadway, R.M., III; Kumar, V.; Ma, S.; Holbery, J.D.; Dickey, M.D. Silicones for stretchable and durable soft devices: Beyond Sylgard-184. ACS Appl. Mater. Interfaces 2018, 10, 11261–11268. [Google Scholar] [CrossRef]
- Zhou, J.; Khodakov, D.A.; Ellis, A.V.; Voelcker, N.H. Surface modification for PDMS-based microfluidic devices. Electrophoresis 2012, 33, 89–104. [Google Scholar] [CrossRef]
- Almutairi, Z.; Ren, C.L.; Simon, L. Evaluation of polydimethylsiloxane (PDMS) surface modification approaches for microfluidic applications. Colloids Surf. A Physicochem. Eng. Asp. 2012, 415, 406–412. [Google Scholar] [CrossRef]
- Gwon, M.; Park, G.; Hong, D.; Park, Y.-J.; Han, S.; Kang, D.; Koh, J.-S. Soft Directional Adhesion Gripper Fabricated by 3D Printing Process for Gripping Flexible Printed Circuit Boards. Int. J. Precis. Eng. Manuf.-Green Technol. 2022, 9, 1151–1163. [Google Scholar] [CrossRef]
- Busche, J.F.; Starke, G.; Knickmeier, S.; Dietzel, A. Controllable dry adhesion based on two-photon polymerization and replication molding for space debris removal. Micro Nano Eng. 2020, 7, 100052. [Google Scholar] [CrossRef]
- Northen, M.T.; Greiner, C.; Arzt, E.; Turner, K.L. A Gecko-inspired reversible adhesive. Adv. Mater. 2008, 20, 3905–3909. [Google Scholar] [CrossRef]
- He, Q.; Pan, H.; Zhao, Z.; Zhang, H.; Yin, G.; Wu, Y.; Cai, L.; Yu, M.; Duan, J.; Shen, Q. Polyvinyl chloride gel based electro-active switchable bio-inspired adhesive. Compos. Part A Appl. Sci. Manuf. 2022, 163, 107180. [Google Scholar] [CrossRef]
- Li, S.; Tian, H.; Shao, J.; Liu, H.; Wang, D.; Zhang, W. Switchable adhesion for nonflat surfaces mimicking geckos’ adhesive structures and toe muscles. ACS Appl. Mater. Interfaces 2020, 12, 39745–39755. [Google Scholar] [CrossRef]
- Paretkar, D.R.; Bartlett, M.D.; McMeeking, R.; Crosby, A.J.; Arzt, E. Buckling of an adhesive polymeric micropillar. J. Adhes. 2013, 89, 140–158. [Google Scholar] [CrossRef]
- Jeong, H.E.; Kwak, M.K.; Suh, K.Y. Stretchable, adhesion-tunable dry adhesive by surface wrinkling. Langmuir 2010, 26, 2223–2226. [Google Scholar] [CrossRef]
- Reddy, S.; Arzt, E.; del Campo, A. Bioinspired surfaces with switchable adhesion. Adv. Mater. 2007, 19, 3833–3837. [Google Scholar] [CrossRef]
- Wang, Y.; Lai, H.; Cheng, Z.; Zhang, H.; Zhang, E.; Lv, T.; Liu, Y.; Jiang, L. Gecko toe pads inspired in situ switchable superhydrophobic shape memory adhesive film. Nanoscale 2019, 11, 8984–8993. [Google Scholar] [CrossRef]
- Park, J.K.; Eisenhaure, J.D.; Kim, S. Reversible Underwater Dry Adhesion of a Shape Memory Polymer. Adv. Mater. Interfaces 2019, 6, 1801542. [Google Scholar] [CrossRef]
- Kroner, E. Switchable bio-inspired adhesives. In Proceedings of the Bioinspiration, Biomimetics, and Bioreplication, San Diego, CA, USA, 26 March 2015; International Society for Optics and Photonics: San Diego, CA, USA, 2015; p. 94290F. [Google Scholar]
- Paretkar, D.; Kamperman, M.; Schneider, A.S.; Martina, D.; Creton, C.; Arzt, E. Bioinspired pressure actuated adhesive system. Mater. Sci. Eng. C 2011, 31, 1152–1159. [Google Scholar] [CrossRef]
- Kroner, E.; Arzt, E. Single macropillars as model systems for tilt angle dependent adhesion measurements. Int. J. Adhes. Adhes. 2012, 36, 32–38. [Google Scholar]
- Shao, Y.; Zhao, J.; Fan, Y.; Wan, Z.; Lu, L.; Zhang, Z.; Ming, W.; Ren, L. Shape memory superhydrophobic surface with switchable transition between “Lotus Effect” to “Rose Petal Effect”. Chem. Eng. J. 2019, 382, 122989. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Rodak, D.E. Is the lotus leaf superhydrophobic? Appl. Phys. Lett. 2005, 86, 144101. [Google Scholar] [CrossRef]
- Cui, T.; Lvov, Y.; Shi, J.; Hua, F. Nanoassembly for Polymer Electronics. In Encyclopedia of Nanoscience and Nanotechnology; American Scientific Publishers: Stevenson Ranch, CA, USA, 2004; pp. 23–51. [Google Scholar]
- Zhao, X.-M.; Xia, Y.; Whitesides, G.M. Soft lithographic methods for nano-fabrication. J. Mater. Chem. 1997, 7, 1069–1074. [Google Scholar]
- Haske, W.; Chen, V.W.; Hales, J.M.; Dong, W.; Barlow, S.; Marder, S.R.; Perry, J.W. 65 nm feature sizes using visible wavelength 3-D multiphoton lithography. Opt. Express 2007, 15, 3426–3436. [Google Scholar]
- Guckenberger, D.J.; de Groot, T.E.; Wan, A.M.; Beebe, D.J.; Young, E.W. Micromilling: A method for ultra-rapid prototyping of plastic microfluidic devices. Lab A Chip 2015, 15, 2364–2378. [Google Scholar]
- Cohen, N.; Dotan, A.; Dodiuk, H.; Kenig, S. Superhydrophobic coatings and their durability. Mater. Manuf. Process. 2016, 31, 1143–1155. [Google Scholar]
- Tyge, E.; Pallisgaard, J.J.; Lillethorup, M.; Hjaltalin, N.G.; Thompson, M.K.; Clemmensen, L.H. Characterizing digital light processing (DLP) 3D printed primitives. In Proceedings of the Scandinavian Conference on Image Analysis, Copenhagen, Denmark, 15–17 June 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 302–313. [Google Scholar]
- Aksak, B.; Murphy, M.P.; Sitti, M. Gecko inspired micro-fibrillar adhesives for wall climbing robots on micro/nanoscale rough surfaces. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19 May 2008; IEEE: New York, NY, USA, 2008; pp. 3058–3063. [Google Scholar]
- Ge, L.; Sethi, S.; Ci, L.; Ajayan, P.M.; Dhinojwala, A. Carbon nanotube-based synthetic gecko tapes. Proc. Natl. Acad. Sci. USA 2007, 104, 10792–10795. [Google Scholar] [CrossRef]
- Mijangos, C.; Hernandez, R.; Martin, J. A review on the progress of polymer nanostructures with modulated morphologies and properties, using nanoporous AAO templates. Prog. Polym. Sci. 2016, 54, 148–182. [Google Scholar] [CrossRef]
- Martin, J.; Maiz, J.; Sacristan, J.; Mijangos, C. Tailored polymer-based nanorods and nanotubes by “template synthesis”: From preparation to applications. Polymer 2012, 53, 1149–1166. [Google Scholar] [CrossRef]
- Sahay, R.; Parveen, H.; Ranganath, A.S.; Ganesh, V.A.; Baji, A. On the adhesion of hierarchical electrospun fibrous structures and prediction of their pull-off strength. RSC Adv. 2016, 6, 47883–47889. [Google Scholar] [CrossRef]
- Darmanin, T.; Guittard, F. Recent advances in the potential applications of bioinspired superhydrophobic materials. J. Mater. Chem. A 2014, 2, 16319–16359. [Google Scholar] [CrossRef]
- Tamelier, J.; Chary, S.; Turner, K.L. Vertical anisotropic microfibers for a gecko-inspired adhesive. Langmuir 2012, 28, 8746–8752. [Google Scholar] [CrossRef]
- Filippov, A.E.; Gorb, S.N. Spatial model of the gecko foot hair: Functional significance of highly specialized non-uniform geometry. Interface Focus 2015, 5, 20140065. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Mei, T.; Sun, S. Mechanical analyses on the digital behaviour of the Tokay gecko (Gekko gecko) based on a multi-level directional adhesion model. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20150085. [Google Scholar] [CrossRef]
- Wang, Y.; Li, X.; Tian, H.; Hu, H.; Tian, Y.; Shao, J.; Ding, Y. Rectangle-capped and tilted micropillar array for enhanced anisotropic anti-shearing in biomimetic adhesion. J. R. Soc. Interface 2015, 12, 20150090. [Google Scholar] [CrossRef]
- Chary, S.; Tamelier, J.; Turner, K. A microfabricated gecko-inspired controllable and reusable dry adhesive. Smart Mater. Struct. 2013, 22, 025013. [Google Scholar] [CrossRef]
- Liu, K.; Du, J.; Wu, J.; Jiang, L. Superhydrophobic gecko feet with high adhesive forces towards water and their bio-inspired materials. Nanoscale 2012, 4, 768–772. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, H.; Shao, J.; Ding, Y. Fabrication of well-defined mushroom-shaped structures for biomimetic dry adhesive by conventional photolithography and molding. ACS Appl. Mater. Interfaces 2014, 6, 2213–2218. [Google Scholar] [PubMed]
- Shahsavan, H.; Zhao, B. Conformal adhesion enhancement on biomimetic microstructured surfaces. Langmuir 2011, 27, 7732–7742. [Google Scholar] [CrossRef] [PubMed]
- Bovero, E.; Krahn, J.; Menon, C. Fabrication and testing of self cleaning dry adhesives utilizing hydrophobicity gradient. J. Bionic Eng. 2015, 12, 270–275. [Google Scholar] [CrossRef]
- Castellanos, G.; Arzt, E.; Kamperman, M. Effect of viscoelasticity on adhesion of bioinspired micropatterned epoxy surfaces. Langmuir 2011, 27, 7752–7759. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Chary, S.; Das, S.; Tamelier, J.; Turner, K.L.; Israelachvili, J.N. Friction and adhesion of gecko-inspired PDMS flaps on rough surfaces. Langmuir 2012, 28, 11527–11534. [Google Scholar] [CrossRef] [PubMed]
- Cañas, N.; Kamperman, M.; Völker, B.; Kroner, E.; McMeeking, R.M.; Arzt, E. Effect of nano-and micro-roughness on adhesion of bioinspired micropatterned surfaces. Acta Biomater. 2012, 8, 282–288. [Google Scholar] [CrossRef]
- Ran, C.; Ding, G.; Liu, W.; Deng, Y.; Hou, W. Wetting on nanoporous alumina surface: Transition between Wenzel and Cassie states controlled by surface structure. Langmuir 2008, 24, 9952–9955. [Google Scholar] [CrossRef]
- Luo, X.; Dong, X.; Hou, Y.; Zhang, L.; Zhang, P.; Cai, J.; Zhao, M.; Ramos, M.A.; Hu, T.S.; Zhao, H. Photo-Detachable Self-Cleaning Surfaces Inspired by Gecko Toepads. Langmuir 2021, 37, 8410–8416. [Google Scholar] [CrossRef]
- Yan, C.; Jiang, P.; Jia, X.; Wang, X. 3D printing of bioinspired textured surfaces with superamphiphobicity. Nanoscale 2020, 12, 2924–2938. [Google Scholar] [CrossRef]
- Elbadawi, M.; Andrikopoulos, G.; Nikolakopoulos, G.; Gustafsson, T. Bio-Inspired Climbing Robots in Wet Environments: Recent Trends in Adhesion Methods and Materials. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; IEEE: New York, NY, USA, 2018; pp. 2347–2353. [Google Scholar]
- Coenjarts, C.A.; Ober, C.K. Two-photon three-dimensional microfabrication of poly (dimethylsiloxane) elastomers. Chem. Mater. 2004, 16, 5556–5558. [Google Scholar] [CrossRef]
- McCoul, D.; Rosset, S.; Schlatter, S.; Shea, H. Inkjet 3D printing of UV and thermal cure silicone elastomers for dielectric elastomer actuators. Smart Mater. Struct. 2017, 26, 125022. [Google Scholar] [CrossRef]
- Ferraris, S.; Guarino, V.; Cochis, A.; Varesano, A.; Maya, I.C.; Vineis, C.; Rimondini, L.; Spriano, S. Aligned keratin submicrometric-fibers for fibroblasts guidance onto nanogrooved titanium surfaces for transmucosal implants. Mater. Lett. 2018, 229, 1–4. [Google Scholar] [CrossRef]
- Khan, I.; Saeed, K.; Khan, I. Nanoparticles: Properties, applications and toxicities. Arab. J. Chem. 2019, 12, 908–931. [Google Scholar] [CrossRef]
- Oktay, B.; Kayaman-Apohan, N. Polydimethylsiloxane (PDMS)-based antibacterial organic–inorganic hybrid coatings. J. Coat. Technol. Res. 2013, 10, 785–798. [Google Scholar] [CrossRef]
- Seong, M.; Jeong, C.; Yi, H.; Park, H.-H.; Bae, W.-G.; Park, Y.-B.; Jeong, H.E. Adhesion of bioinspired nanocomposite microstructure at high temperatures. Appl. Surf. Sci. 2017, 413, 275–283. [Google Scholar] [CrossRef]
- Tian, Y.; Qi, H.; Wu, H.; Zhang, D. Friction behavior of gecko-inspired polydimethylsiloxane micropillar array with tailored Young’s modulus by incorporation of ZrO2 particles. Chem. Phys. Lett. 2021, 763, 138202. [Google Scholar] [CrossRef]
- Koh, K.H.; Chetty, R.K.; Ponnambalam, S. Modeling and simulation of electrostatic adhesion for wall climbing robot. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; IEEE: New York, NY, USA, 2011; pp. 2031–2036. [Google Scholar]
- Alizadehyazdi, V.; Modabberifar, M.; Mahmoudzadeh Akherat, S.J.; Spenko, M. Electrostatic self-cleaning gecko-like adhesives. J. R. Soc. Interface 2018, 15, 20170714. [Google Scholar] [CrossRef]
- He, Q.; Yang, X.; Wang, Z.; Zhao, J.; Yu, M.; Hu, Z.; Dai, Z. Advanced electro-active dry adhesive actuated by an artificial muscle constructed from an ionic polymer metal composite reinforced with nitrogen-doped carbon nanocages. J. Bionic Eng. 2017, 14, 567–578. [Google Scholar] [CrossRef]
- Pugal, D.; Jung, K.; Aabloo, A.; Kim, K.J. Ionic polymer–metal composite mechanoelectrical transduction: Review and perspectives. Polym. Int. 2010, 59, 279–289. [Google Scholar] [CrossRef]
- Carrico, J.D.; Traeden, N.W.; Aureli, M.; Leang, K.K. Fused filament 3D printing of ionic polymer-metal composites (IPMCs). Smart Mater. Struct. 2015, 24, 125021. [Google Scholar] [CrossRef]
- Ma, S.; Scaraggi, M.; Lin, P.; Yu, B.; Wang, D.; Dini, D.; Zhou, F. Nanohydrogel brushes for switchable underwater adhesion. J. Phys. Chem. C 2017, 121, 8452–8463. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Q.; Gao, Z.; Hou, R.; Gao, G. Bioinspired adhesive hydrogel driven by adenine and thymine. ACS Appl. Mater. Interfaces 2017, 9, 17645–17652. [Google Scholar] [CrossRef] [PubMed]
- Son, D.; Liimatainen, V.; Sitti, M. Machine Learning-Based and Experimentally Validated Optimal Adhesive Fibril Designs. Small 2021, 17, 2102867. [Google Scholar] [CrossRef]
- Chen, F.; Xiang, W.; Yin, S.; Huang, S. Magnetically Responsive Superhydrophobic Surface with Switchable Adhesivity Based on Electrostatic Air Spray Deposition. ACS Appl. Mater. Interfaces 2021, 13, 20885–20896. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Q.; Zou, R.; Song, B.; Yan, C.; Shi, Y.; Su, B. 3D-Printed Superhydrophobic and Magnetic Device That Can Self-Powered Sense a Tiny Droplet Impact. Engineering 2022, 15, 196–205. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, Q.; Wu, Z.; Chen, D.; Yan, C.; Shi, Y.; Dickey, M.D.; Su, B. A Superconducting-Material-Based Maglev Generator Used for Outer-Space. Adv. Mater. 2022, 34, 2203814. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.H.; Kim, H.S.; Song, H.W.; Kwak, M.K. Fluorocarbon rubber-based inert dry adhesive for applications under harsh conditions. ACS Appl. Polym. Mater. 2021, 3, 3981–3988. [Google Scholar] [CrossRef]
- Lutz, C.; Ma, Z.; Thelen, R.; Syurik, J.; Il’in, O.; Ageev, O.; Jouanne, P.; Hölscher, H. Analysis of carbon nanotube arrays for their potential use as adhesives under harsh conditions as in space technology. Tribol. Lett. 2019, 67, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Chen, Y.; Wainwright, D.K.; Kenaley, C.P.; Gong, Z.; Liu, Z.; Liu, H.; Guan, J.; Wang, T. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2017, 2, eaan8072. [Google Scholar] [CrossRef]
- Sandoval, J.A.; Jadhav, S.; Quan, H.; Deheyn, D.D.; Tolley, M.T. Reversible adhesion to rough surfaces both in and out of water, inspired by the clingfish suction disc. Bioinspiration Biomim. 2019, 14, 066016. [Google Scholar] [CrossRef]
- Frey, S.T.; Haque, A.T.; Tutika, R.; Krotz, E.V.; Lee, C.; Haverkamp, C.B.; Markvicka, E.J.; Bartlett, M.D. Octopus-inspired adhesive skins for intelligent and rapidly switchable underwater adhesion. Sci. Adv. 2022, 8, eabq1905. [Google Scholar] [CrossRef] [PubMed]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).