Abstract
This paper aims to solve the consensus problem of three different types of multi-agent systems under fixed communication delay. For these three different types of multi-agent systems, three new control protocols are constructed to solve the consensus issue of multi-agent systems with coupling weights, which is rarely considered in other related articles. For fixed coupled multi-agent systems, a new control strategy is designed by Lyapunov theory, matrix theory, and the inequality method to ensure the consensus of multi-agent systems. An adaptive coupling weight updating scheme is proposed for adaptive coupling multi-agent systems to achieve the consensus state of the multi-agent systems. Finally, experimental results show the effectiveness of the proposed three different algorithms.
1. Introduction
Now, more and more coordination control methods have been applied to smart grid power allocation [1], tracking control [2], Unmanned Aerial Vehicle (UAV) formation control [3], and others. The design of a cooperative control protocol determines whether the whole system can reach consensus in multi-agent systems. Through the transmission of information between two adjacent agents, a control protocol is designed to make the state values of all agents reach a state [4]. For achieving the consensus of multi-agent systems, the design of a control protocol has attracted much consideration.
It is worth noting that for the control strategy of multi-agent systems, there are currently two main popular control models: the leader–follower model and the leaderless model. Under the action of the cooperative control protocol, all the state values of the follower agents can reach the same state value as the followers [5,6,7]. In [5], Sader et al. studied the problem that leader–follower multi-agent systems exit fuzzy fault-tolerant tracking consensus. Zhang et al. [6] investigated the linear leader–follower multiagent systems problem with nonzero leader input. In [7], Tian et al. researched the leader–following multi-agent systems fixed-time problem of high-order with external disturbances. In addition, leaderless multi-agent models have been extensively studied [8,9,10]. In the leaderless system model, the information between agents does not need to be exchanged with the leader, only agents exchange information with neighboring agents. In [8], Tian et al. proposed the consensus problem of second-order leaderless multi-agent systems with parametric uncertainties. Rezaee and Abdollahi [9] investigated the problem of strict-feedback nonlinear leaderless multi-agent systems with control directions. Other than that, Difilippo et al. [10] studied the problem of a leaderless agents system by forming a uniformly spaced string. The above-mentioned leader–follower model and leaderless model give us a lot of inspiration for our work in this paper.
It is worth noting that the system often has time delays in the practical application process [11,12,13]. In recent years, more and more scholars have started to extensively study the lag synchronization problem of the multi-agent system [14,15,16,17,18]. Ref. [14] mainly studied the generalized delay synchronization problem of weighted complex networks of time delays. The authors designed an appropriate controller to achieve synchronization in the time delay state by using the Lyapunov function and inequality techniques. Unlike [14], Xie et al. [15] set an observer to detect the state between the agent and its neighbors without considering the factor of network weight where a control strategy was designed for a multi-agent system. For the system in the nonlinear state, the predictor was designed in the literature [16] to suppress the disturbance factors and achieve a consensus effect. To reduce the influence of input delay in a multi-agent system, the consensus issue was transformed into a robust H∞ consensus control issue by designing the control output in [17]. In [18], a method based on frequency domain analysis was proposed to carry out the consensus control of a multi-agent system with coupling weight.
However, in the multi-agent system, if the communication between agents is delayed or interrupted, the consensus of the multi-agent system will be reduced or destroyed [19,20,21,22]. In [19], the double-tree-from transformations method was introduced to solve the communication delay problem between agents. Different from [19], Ref. [20] divided a group into many clusters and then conducted modeling processing on aperiodic sampling and communication delay, obtaining the necessary conditions for forming clusters through detailed theoretical analysis. For the consensus issue of a fixed multi-agent system, the solution proposed in [21] was to establish a model with linear parameters, where a kind of directed fixed adaptive consensus algorithm was proposed for satisfying the equilibrium condition. Lu [23] proposed a new distributed primal-dual algorithm for a continuous-time multi-agent system under a time-varying graph to address the problem of distributed resource allocation. In paper [24], the problem of a nonlinear multiagent system under time-varying delay is taken into account. They have given a good solution strategy for dealing with communication delays in multi-agent systems. Motivated by the above research results, this paper mainly studies the adaptive and fixed coupling consensus of multi-agent systems with communication delays.
Inspired by the discussions above, this paper on the consensus problem of three different types of multi-agent control under communication delay. We design three different control protocols to achieve the consensus of multi-agent systems. The main innovation points are listed as follows:
(1) Different from the paper [14], this paper studies the consensus problem of fixed and adaptive coupled multi-agent systems with communication delays, and our research is more general.
(2) Three new control protocols are designed for three different types of multi-agent systems. For adaptive coupling multi-agent systems, an adaptive coupling weight updating scheme is proposed to ensure consensus for two cases in an adaptive coupling situation.
The rest of this paper is organized as follows. Some notations are given in Section 2. Section 3 studies consensus control of fixed and adaptive coupling multi-agent systems with communication delays. In Section 4, several simulations are presented to verify the correctness of the theoretical results. Finally, the conclusion is written in Section 5.
2. Problem Formulation
Notations
The n-dimensional Euclidean space is . The notation denotes the set of matrix spaces. The notation denotes an identity matrix with appropriate dimensions. The Euclidean norm is . The Kronecker product is ⊗. The notation is the transpose of a matrix W. The notation represents the maximum eigenvalues of corresponding matrix. The notation represents the minimum eigenvalues of corresponding matrix. The notation is a neighbor of the ith node.
In this part, we design three different control strategies for three different types of multi-agent systems, and prove the stability bywith the Lyapunov function.
Case 1: The consensus of fixed coupling leaderless multi-agent systems with communication delays. Consider a fixed coupling multi-agent system with N agents, where the dynamic of the ith agent is described by
where is the state vector of node i, represents the control input vector of node i, is a constant matrix, represents the coupling strength, denotes the inner coupling matrix. stands for the outer coupling weight, where satisfies if there is a connection between node i and node j and otherwise, and . Assume that the network of system (1) is connected in this paper.
Remark 1.
Compared with [20], there are internal and external coupling in multi-agent systems in this paper. Such systems are more applicable in reality.
Definition 1.
The multi-agent system (1) can reach an average consensus if the following condition is satisfied.
For multi-agent systems (1), the control protocol is designed as
where denotes control gain and denotes communication delay of agent j to agent i. In this paper, the communication delay is a fixed delay, which means that it does not change with time. Define error . Then
Case 2: A fixed coupling leader–following multi-agent system with N agents, where the dynamic of ith agent is described by
where denotes the state of following agents and denotes the state of leader agent. The notations and are defined in (1).
Definition 2.
The multi-agent system (5) can reach leader–following consensus if following condition satisfies.
For multi-agent systems (5), the control protocol is designed as
where denotes control gain and denotes communication delay. Define error , then
Case 3: Consider an adaptive coupling leaderless multi-agent system with N agents, where the dynamic of ith agent is described by
where , is the state of agent, is time-varying matrix, where satisfies . If there is connection between agent i and agent j and . Furthermore, when . is a constant matrix. is a coupling strength. is a inner coupling matrix. represents the control input vector of node i. For system (9), the following controller is designed
where and is communication delay of agent j to agent i. Let error , then
The adaptive strategy for updating the coupling weight is designed as follows:
where and denote the set of edges in a multi-agent system (9).
3. Main Results
In this section, the sufficient conditions of consensus of fixed and adaptive coupled multi-agent systems with communication delays will be provided. We give the specifically designed three new control protocols and the matrix inequality conditions.
Theorem 1.
The fixed coupling multi-agent systems (1) achieve average consensus under protocol (3) if there exists matrix P such that
Proof.
Select the Lyapunov functional as follows:
The derivation of time on both sides of Equation (14) can be obtained
Combined with Equation (4), we obtain
Since the system (1) is undirected, Equation (16) can be rewritten as
where . Since , . According to Definition 1, the systems (1) can achieve average consensus. □
Theorem 2.
The fixed coupling multi-agent systems (6) achieve leader–following consensus under protocol (7) if the following condition is satisfied
Proof.
The Lyapunov functional is selected
The derivation of time on both sides of Equation (19) can be obtained
Combine with Equation (8), obtaining
where
Since , . According to Definition 2, the systems (6) can achieve leader–following consensus. □
Theorem 3.
The multi-agent system (9) realizes average consensus under controller (10) and the adaptive strategy (12).
Proof.
The Lyapunov functional is chosen as follows
where and if and only if . The derivation of time on both sides of Equation (22) can be obtained
Since
Combining Equation (23) with Equation (24), one has
where , Since the network of system (9) is connected, . Obviously, there is a unitary matrix H such that , where So from Equation (25) we can obtain
Let us pick a large enough number
From Equations (26) and (27), we have . So, the multi-agent system (9) achieves average consensus under the adaptive strategy (12) and controller (10). □
Remark 2.
The communication delay is fixed in this paper. If the communication delay is time-varying, it will affect the system to achieve consensus. Reference [25] pointed out that the communication network between the control center and the actuator faces the challenge of random communication delay, which will also affect the control of smart grids.
Remark 3.
In real life, time delay often changes with time. This phenomenon of time-varying delay is also a hot topic in current research. In the future research, the fixed delay term used in this paper can be further modified as a time-varying term, but the influence of such time-varying terms on system stability needs to be further considered.
4. Numerical Simulations
In this section, a simulation experiment will be given to verify the effectiveness of the algorithm proposed in this paper.
4.1. Example 1
Consider a multi-agent system, whose dynamic is described as follows
where , , . Under control protocol (3), we choose , . The conditions given above can satisfy Theorem 1. The states trajectories of five agents and input signal under protocol (3) are drawn in Figure 1 and Figure 2. Figure 3 depicts that variation of error. Obviously, the average consensus is achieved.
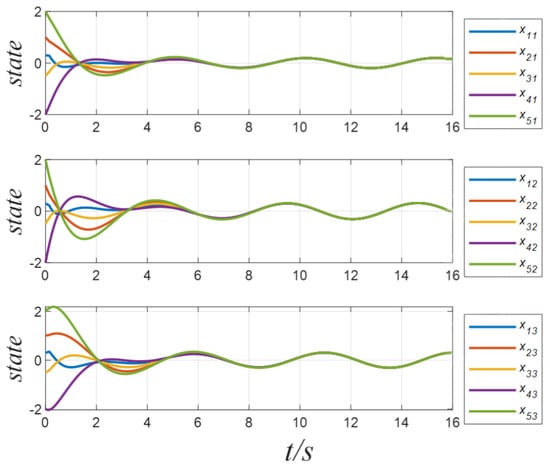
Figure 1.
The states trajectories of five agents.
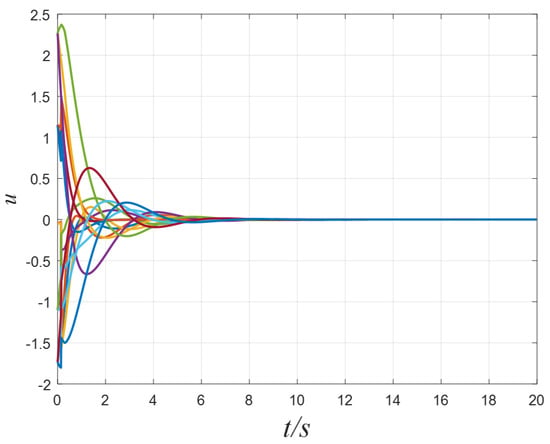
Figure 2.
The input signal trajectories under protocol (3).
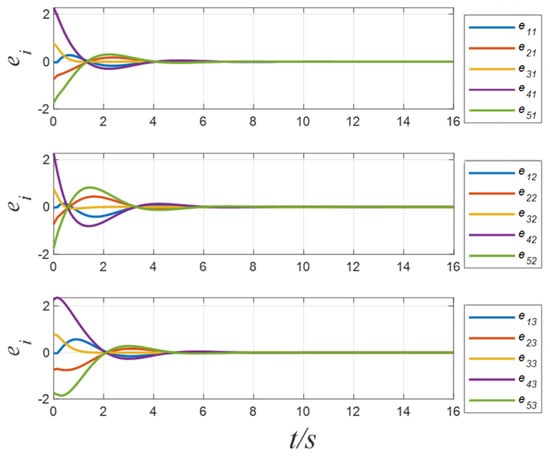
Figure 3.
The error trajectories.
4.2. Example 2
A leader–following multi-agent system is considered. In Equation (5), choose , , , .
Under protocol (7), use The condition of Theorem 2 is satisfied. The sates trajectories and the input signal under protocol (7) are depicted in Figure 4 and Figure 5. Figure 6 depicts that variation of error. As we can see, the leader–following consensus is realized.
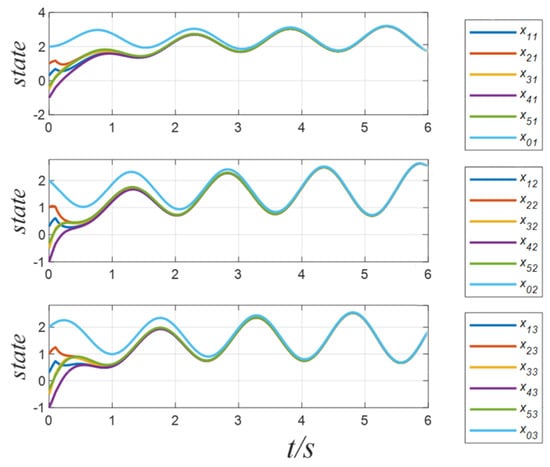
Figure 4.
The states trajectories of six agents.
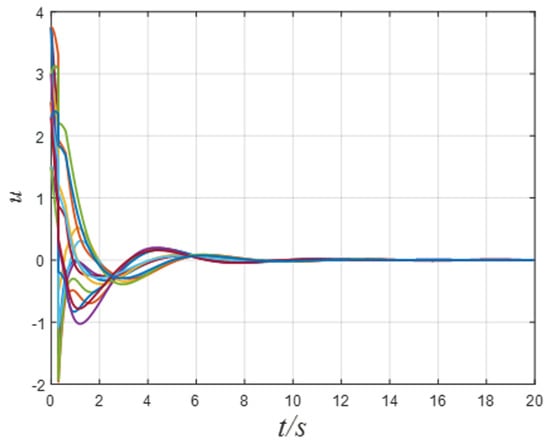
Figure 5.
The input signal trajectories under protocol (7).
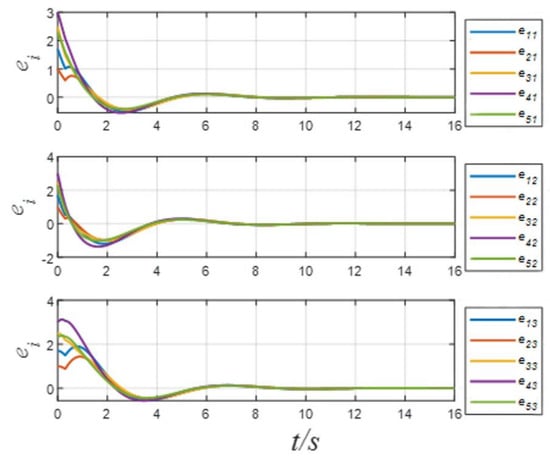
Figure 6.
The error trajectories.
4.3. Example 3
A leaderless multi-agent system with adaptive couplings is considered. In Equation (9), choose , , From control protocol (10), we choose , . The states and input control (10) trajectories are described in Figure 7 and Figure 8. The error changes with time as shown in Figure 9. Clearly, the average consensus is achieved under protocol (10) and adaptive strategy (12). Figure 10 displays the changing of the coupling weights.
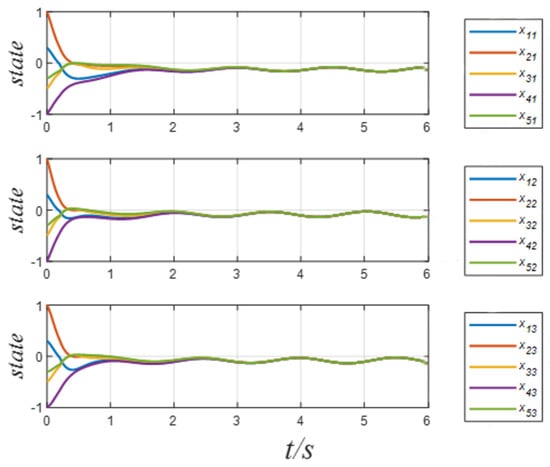
Figure 7.
The states trajectories of five agents.
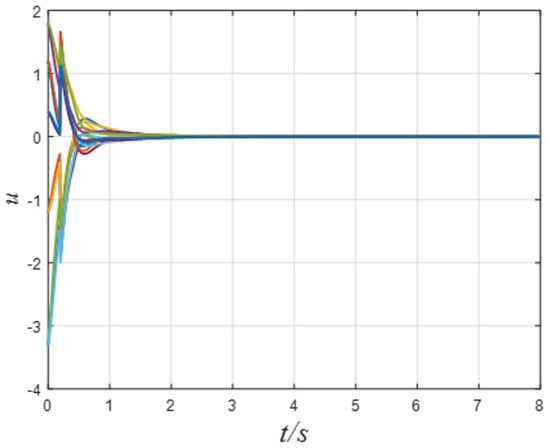
Figure 8.
The input signal trajectories of five agents.
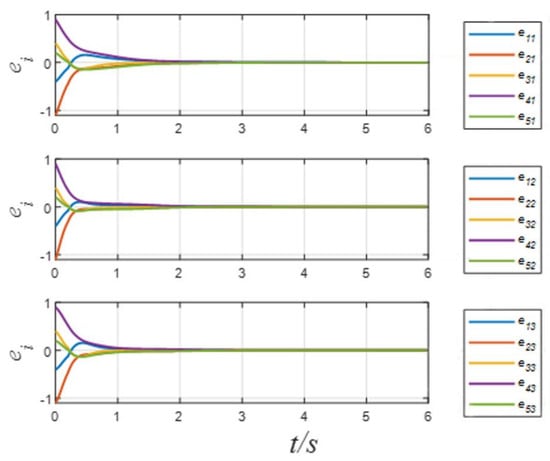
Figure 9.
The error trajectories of five agents.
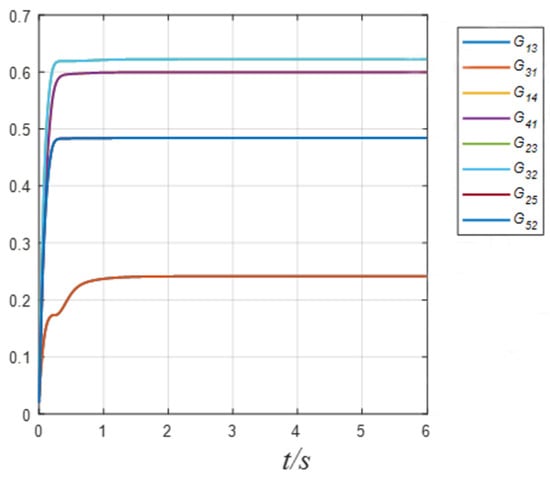
Figure 10.
The adaptive coupling weights.
In this paper, we study the consensus problem of three different types of multi-agent systems with fixed communication delays. It is not difficult to find from the experimental results that multi-agent systems are mainly divided into two categories. One is a multi-agent system with a leader, and the other is a multi-agent system without a leader. For a leader–follower system, the state values of all agents in the system will eventually converge to the state values of the leader. In a multi-agent system without a leader, the state values of the agents will gradually converge under the action of the controller.
5. Conclusions
In this study, we investigate the consensus problem of fixed and adaptive coupled multi-agent systems with communication delays. For fixed coupling multi-agent systems and adaptive coupling multi-agent systems, we study three different models of multi-agent models, and give corresponding control strategies to offset the impact of communication delay on multi-agent systems. The rationality of the proposed strategy and theorem is proved by using Lyapunov theory and matrix inequality. Finally, the proposed theory is verified by simulation experiments. In this paper, the communication delay is fixed, but in life, the delay is often changed. Therefore, in the future research, the time-varying delay will be the direction of our further research.
Author Contributions
Methodology, S.T. and Q.H.; Software, S.T.; Formal analysis, S.T.; Data curation, Z.Q.; Writing review and editing, Y.T., T.W. and T.M.; Funding acquisition, B.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the Science and Technology Research Program of Chongqing Municipal Education Commission in China (KJZD-K201901504, KJQN201901537, and KJZD-K202100104), in part by the Natural Science Foundation of Chongqing (cstc2021jcyj-msxmX1212, cstc2021jcyj-msxmX0146), in part by the West Light Foundation of the Chinese Academy of Science, in part by the Open Foundation of Chongqing University of Science and Technology No. cqsrc202110, in part by Bingtuan Science and Technology Program in China (No. 2021AB026), in part by the Scientific Research Foundation of Chongqing University of Science and Technology (No. ckrc2020027).
Conflicts of Interest
The authors declare that they have no known competing financial interest or personal relationship that could have appeared to influence the work reported in this paper.
References
- Thakoor, O.; Garg, J.; Nagi, R. Multiagent UAV Routing: A Game Theory Analysis with Tight Price of Anarchy Bounds. IEEE Trans. Autom. Sci. Eng. 2019, 17, 100–116. [Google Scholar] [CrossRef]
- Krupa, P.; Limon, D.; Alamo, T. Harmonic Based Model Predictive Control for Set-Point Tracking. IEEE Trans. Autom. Control 2022, 67, 48–62. [Google Scholar] [CrossRef]
- Guo, F.; Xu, Q.; Wen, C.; Wang, L.; Wang, P. Distributed secondary control for power allocation and voltage restoration in islanded DC microgrids. IEEE Trans. Sustain. Energy 2018, 9, 1857–1869. [Google Scholar] [CrossRef]
- Ding, L.; Han, Q.-L.; Guo, G. Network-based leader-following consensus for distributed multi-agent systems. Automatica 2013, 49, 2281–2286. [Google Scholar] [CrossRef]
- Sader, W.; Wang, F.; Liu, Z.; Chen, Z. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties. J. Syst. Eng. Electron. 2021, 32, 1031–1040. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.; Luo, Y.; Liu, Y. Adaptive Event-Triggered Leader-Follower Consensus of Linear Multiagent Systems under Directed Graph with Nonzero Leader Input. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1442–1446. [Google Scholar] [CrossRef]
- Tian, B.W. Leader-follower fixed-time consensus of multi-agent systems with high-order integrator dynamics. Int. J. Control 2017, 90, 1420–1427. [Google Scholar] [CrossRef]
- Tian, K.; Guo, Z.; Mei, J.; Jiang, C.; Ma, G. Leaderless Consensus for Second-Order Inertia Uncertain Multi-Agent Systems under Directed Graphs without Relative Velocity Information. IEEE Trans. Netw. Sci. Eng. 2021, 8, 3417–3429. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. Adaptive Leaderless Consensus Control of Strict-Feedback Nonlinear Multiagent Systems with Unknown Control Directions. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6435–6444. [Google Scholar] [CrossRef]
- Difilippo, G.; Fanti, M.P.; Mangini, A.M. Maximizing Convergence Speed for Second Order Consensus in Leaderless Multi-Agent Systems. IEEE/CAA J. Autom. Sin. 2022, 9, 259–269. [Google Scholar] [CrossRef]
- Yang, J. A Consensus Control for a Multi-Agent System with Unknown Time-Varying Communication Delays. IEEE Access 2021, 9, 55844–55852. [Google Scholar] [CrossRef]
- Li, C.; Liu, G.P.; Qi, L.; Li, J.; Du, Z.; Yang, X. Predictive Consensus for Networked Multi-Agent Systems with Switching Topology, Input Delay and Time-Varying Communication Delays. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 444–448. [Google Scholar]
- Zhu, Q.; Cao, J. Stability analysis of Markovian jump stochastic BAM neural networks with impulse control and mixed time delays. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 467–479. [Google Scholar]
- Qing, W.; Wang, J.L.; Yan, H.L.; Ren, S.Y. Generalized lag synchronization of multiple weighted complex networks with and without time delay. J. Frankl. Inst. 2018, 355, 6597–6616. [Google Scholar]
- Xie, D.M.; Chen, J.H. Consensus problem of data-sampled networked multi-agent systems with time-varying communication delays. Trans. Inst. Meas. Control 2013, 35, 753–763. [Google Scholar] [CrossRef]
- Wang, C.Y.; Zuo, Z.Y.; Sun, J.Y.; Ding, Z. Consensus disturbance rejection for Lipschitz nonlinear multi-agent systems with input delay: A DOBC approach. J. Frankl. Inst. 2017, 354, 298–315. [Google Scholar] [CrossRef]
- Li, Z.X.; Ji, H.-B. Robust delay-dependent H∞ consensus control for multi-agent systems with input delays. Automatica 2014, 40, 2556–2562. [Google Scholar] [CrossRef]
- Tian, Y.P.; Liu, C.L. Robust consensus of multi-agent systems with diverse input delays and asymmetric interconnection perturbations. Automatica 2009, 45, 1347–1353. [Google Scholar] [CrossRef]
- Yu, J.; Wang, L. Group consensus in multi-agent systems with switching topologies and communication delays. Syst. Control Lett. 2010, 59, 340–348. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.L.; Zhang, X.M. Achieving Cluster Formation of Multi-Agent Systems under Aperiodic Sampling and Communication Delays. IEEE Trans. Ind. Electron. 2018, 65, 3417–3426. [Google Scholar] [CrossRef]
- Tu, Z.; Yu, H.; Xia, X. Decentralized finite-time adaptive consensus of multi-agent systems with fixed and switching network typologies. Neurocomputing 2017, 219, 59–67. [Google Scholar] [CrossRef]
- Mo, L.; Yuan, X.; Yu, Y. Neuro-adaptive Leaderless Consensus of Fractional-order Multi-agent Systems. Neurocomputing 2019, 339, 17–25. [Google Scholar] [CrossRef]
- Lu, K.; Xu, H.; Zheng, Y. Distributed resource allocation via multi-agent systems under time-varying networks. Automatica 2022, 136, 110059. [Google Scholar] [CrossRef]
- Ali, M.S.; Agalya, R.; Priya, B.; Kumar Thakur, G.; Asma Kauser, S. Reliable controller for nonlinear multiagent system with additive time varying delay and nonlinear actuator faults. Math. Methods Appl. Sci. 2022, 45, 561–574. [Google Scholar]
- Panda, D.K.; Das, S.; Townley, S. Toward a More Renewable Energy-Based LFC under Random Packet Transmissions and Delays with Stochastic Generation and Demand. IEEE Trans. Autom. Sci. Eng. 2020, 99, 1217–1232. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).