
Classification Algorithm of 3D Pattern Film Using the Optimal Widths of a Histogram


Abstract
:1. Introduction
2. Related Works
3. Proposed Algorithm
3.1. Fast Fourier Transform for Cropping 3D Pattern Film Images
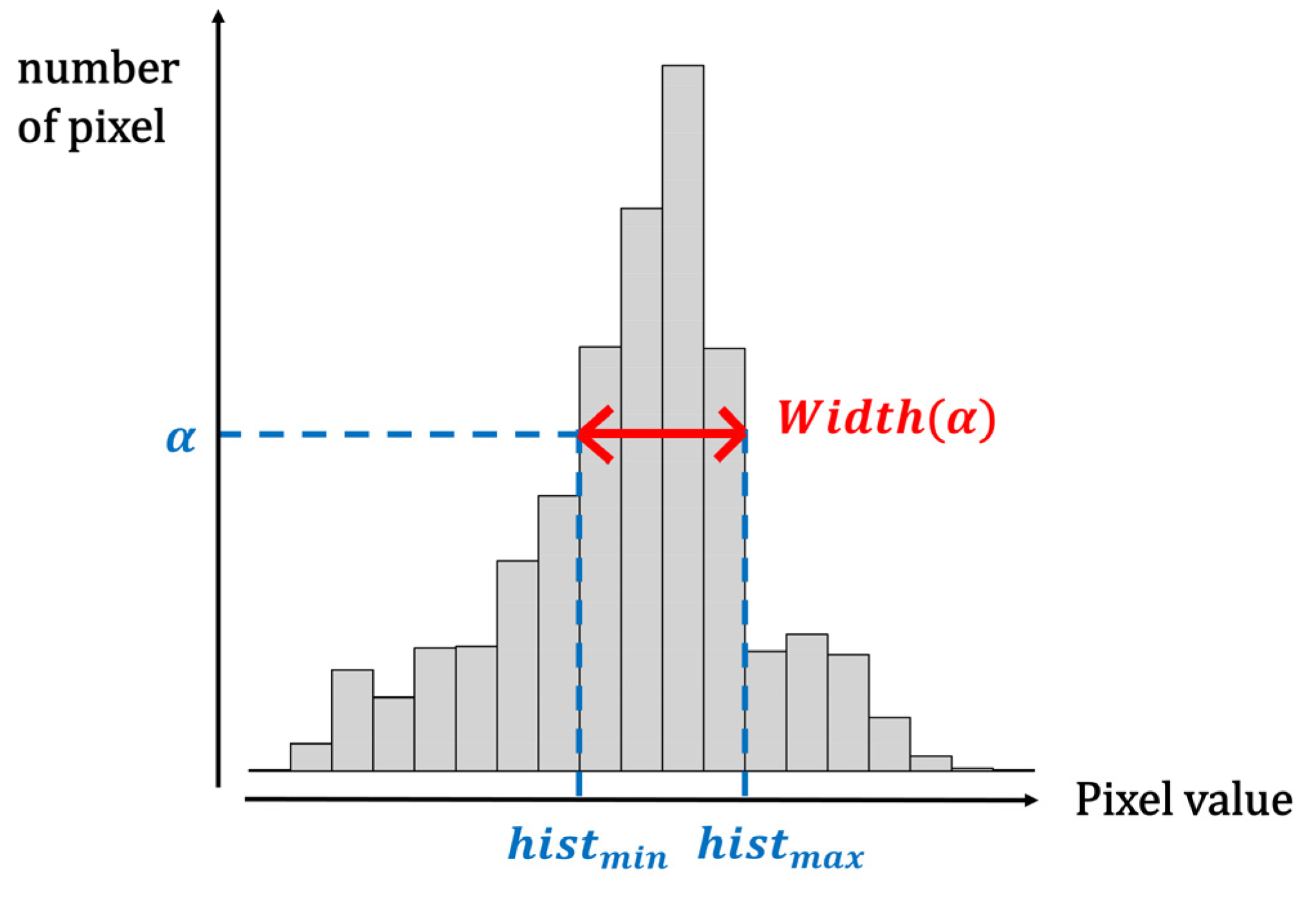
3.2. Classification for 3D Pattern Film Images Based on Widths at Specific Heights of Histogram
4. Experimental Results
5. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mirbod, M.; Rezaei, B.; Najafi, M. Spatial change recognition model using artificial intelligence to remote sensing. Procedia Comput. Sci. 2023, 217, 62–71. [Google Scholar] [CrossRef]
- Mustafa, W.A.; Kader, M.A. Binarization of Document Images: A Comprehensive Review. J. Phys. Conf. Ser. 2018, 1019, 012023. [Google Scholar] [CrossRef]
- Seelaboyina, R.; Vishwakarma, R. Different Thresholding Techniques in Image Processing: A Review. In Proceedings of the ICDSMLA 2021: Proceedings 3rd International Conference on Data Science, Machine Learning and Applications, Copenhagen, Denmark, 17–18 September 2022; pp. 23–29. [Google Scholar]
- Owotogbe, Y.S.; Ibiyemi, T.S.; Adu, B.A. Edge detection techniques on digital images—A review. Int. J. Innov. Res. Technol. 2019, 4, 329–332. [Google Scholar]
- Mlyahilu, J.; Kim, Y.; Kim, J. Classification of 3D Film Patterns with Deep Learning. Comput. Commun. 2019, 7, 158–165. [Google Scholar] [CrossRef]
- Álvarez, L.; Baumela, L.; Neila, P.M.; Henríquez, P. A real time morphological snakes algorithm. Image Process. Line 2014, 2, 1–7. [Google Scholar] [CrossRef]
- Mlyahilu, J.; Mlyahilu, J.; Lee, J.; Kim, Y.; Kim, J. Morphological geodesic active contour algorithm for the segmentation of the histogram-equalized welding bead image edges. IET Image Process. 2022, 16, 2680–2696. [Google Scholar] [CrossRef]
- Medeiros, A.G.; Guimarães, M.T.; Peixoto, S.A.; Santos, L.D.O.; da Silva Barros, A.C.; Rebouças, E.D.S.; Victor Hugo, C.D.; Rebouças Filho, P.P. A new fast morphological geodesic active contour method for lung CT image segmentation. Measure 2019, 148, 106687. [Google Scholar] [CrossRef]
- Ma, J.; Wang, D.; Wang, X.P.; Yang, X. A Fast Algorithm for Geodesic Active Contours with Applications to Medical Image Segmentation. arXiv 2020, arXiv:2007.00525v1. [Google Scholar]
- Rao, B.S. Dynamic histogram equalization for contrast enhancement for digital images. Appl. Soft Comput. 2020, 89, 106114. [Google Scholar] [CrossRef]
- Sara, U.; Morium, A.; Uddin, M.S. Image quality assessment through FSIM, SSIM, MSE and PSNR—A comparative study. J. Comput. Commun. 2019, 7, 8–18. [Google Scholar] [CrossRef]
- Hsu, P.; Chen, B.Y. Blurred image detection and classification. In International Conference on Multimedia Modeling; Springer: Berlin/Heidelberg, Germany, 2008; pp. 277–286. [Google Scholar]
- Wang, R.; Li, W.; Li, R.; Zhang, L. Automatic blur type classification via ensemble SVM. Signal Process. Image Commun 2019, 71, 24–35. [Google Scholar] [CrossRef]
- Salman, A.; Semwal, A.; Bhatt, U.; Thakkar, V.M. Leaf classification and identification using canny edge detector and SVM classifier. In Proceedings of the 2017 International Conference on Inventive Systems and Control, Coimbatore, India, 19–20 January 2017; pp. 1–4. [Google Scholar]
- Wang, R.; Li, W.; Qin, R.; Wu, J. Blur image classification based on deep learning. In Proceedings of the International Conference on Imaging Systems and Techniques, Beijing, China, 18–20 October 2017; pp. 1–6. [Google Scholar]
- Li, Y.; Ye, X.; Li, Y. Image quality assessment using deep convolutional networks. AIP Adv. 2017, 7, 125324. [Google Scholar] [CrossRef]
- Thomas, M.V.; Kanagasabapthi, C.; Yellampalli, S.S. VHDL implementation of pattern based template matching in satellite images. In Proceedings of the SmartTechCon 2017, Bangalore, India, 17–19 August 2017; pp. 820–824. [Google Scholar]
- Satish, B.; Jayakrishnan, P. Hardware implementation of template matching algorithm and its performance evaluation. In Proceedings of the International Conference MicDAT, Vellore, India, 10–12 August 2017; pp. 1–7. [Google Scholar]
- Mlyahilu, J.; Kim, J. A Fast Fourier Transform with Brute Force Algorithm for Detection and Localization of White Points on 3D Film Pattern Images. J. Imaging Sci. Technol. 2022, 66, 1–13. [Google Scholar] [CrossRef]
- Van den Berg, C.P.; Hollenkamp, M.; Mitchell, L.J.; Watson, E.J.; Green, N.F.; Marshall, N.J.; Cheney, K.L. More than noise: Context-dependent luminance contrast discrimination in a coral reef fish (Rhinecanthus aculeatus). J. Exp. Biol. 2020, 223, jeb232090. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height () | 1/5 | 2/5 | 3/5 | 4/5 | |
|---|---|---|---|---|---|
| Good pattern image | Min | 125 | 125 | 28 | 1 |
| Max | 227 | 227 | 196 | 164 | |
| Bad pattern image | Min | 24 | 24 | 4 | 1 |
| Max | 94 | 94 | 31 | 25 | |
| Number of Collapsed Images | 0 | 0 | 10 | 348 | |
| Accuracy (%) | 100 | 100 | 98.68 | 54.21 | |
| Algorithm | Number of Misclassified Images | Accuracy | Recall | Specificity | AUC | Time (s) | |
|---|---|---|---|---|---|---|---|
| Good Pattern | Bad Pattern | ||||||
| Proposed algorithm ( | 0 | 0 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 54.450 |
| Michelson contrast [10] | 62 | 10 | 0.9053 | 0.8912 | 0.9474 | 0.9193 | 9.625 |
| Morphological geodesic active contour [7] | 101 | 90 | 0.7486 | 0.8228 | 0.5263 | 0.6746 | 485.690 |
| Canny + SVM [14] | 113 | 85 | 0.7394 | 0.8018 | 0.5526 | 0.6772 | 6.800 |
| Canny + CNN [5] | - | - | 0.7150 | 0.7805 | 0.6681 | - | 0.954 |
| Abs-based difference | 227 | 117 | 0.5474 | 0.6018 | 0.3842 | 0.4930 | 1.316 |
| Otsu thresholding | 368 | 179 | 0.2803 | 0.3544 | 0.5790 | 0.2061 | 1.328 |
| Canny edge detection | 570 | 0 | 0.2500 | 0.0000 | 100.00 | 0.5000 | 1.451 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Choi, H.; Kim, J. Classification Algorithm of 3D Pattern Film Using the Optimal Widths of a Histogram. Electronics 2023, 12, 4139. https://doi.org/10.3390/electronics12194139
Lee J, Choi H, Kim J. Classification Algorithm of 3D Pattern Film Using the Optimal Widths of a Histogram. Electronics. 2023; 12(19):4139. https://doi.org/10.3390/electronics12194139
Chicago/Turabian StyleLee, Jaeeun, Hongseok Choi, and Jongnam Kim. 2023. "Classification Algorithm of 3D Pattern Film Using the Optimal Widths of a Histogram" Electronics 12, no. 19: 4139. https://doi.org/10.3390/electronics12194139
APA StyleLee, J., Choi, H., & Kim, J. (2023). Classification Algorithm of 3D Pattern Film Using the Optimal Widths of a Histogram. Electronics, 12(19), 4139. https://doi.org/10.3390/electronics12194139