Abstract
Prior study suggests that VANET has two types of communications: Vehicle to Vehicle (V2V) and Vehicle to Infrastructure (V2I) communications. V2V is very important and ensures cooperative communications between vehicles and safety measures. It is also defined as Inter-Vehicle Communication (IVC).The communication is based on clustering the nodes to transmit the data from vehicle to vehicle. The overhead and stability are considered as main challenges that need to be addressed during vehicle intersections. In this paper, a novel self-adaptable Angular based k-medoid Clustering Scheme (SAACS) is proposed to form flexible clusters. The clusters are formed by estimating the road length and transmission ranges to minimize the network delay. And the Cluster Head (CH) is elected from a novel performance metric, ‘cosine-based node uncoupling frequency,’ that finds the best nodes irrespective of their current network statistics. The parametric analysis varies according to the number of vehicular nodes with the transmission range. The experimental results have proven that the proposed technique serves better in comparison to existing approaches such as Cluster Head Lifetime (CHL), Cluster Member Lifetime (CML), Cluster Number (CL), Cluster Overhead (CO), Packet Loss Ratio (PLR) and Average Packet Delay (APD). CHL is enhanced 40% as compare to Real-Time Vehicular Communication (RTVC), Efficient Cluster Head Selection (ECHS) whereas CML is 50% better than RTVC and ECHS. Packet loss ratio and overhead is 45% better in our proposed algorithm than RTVC and ECHS. It is observed from the results that the incorporation of cosine-based node uncoupling frequency has minimized the incongruity between vehicular nodes placed in dense and sparse zones of highways.
1. Introduction
The recent developments in Wireless Sensor Networks (WSNs) technologies have introduced many real-time applications such as in military, airforce, etc. A wireless network is a data communication system that uses radio-frequency for transmitting and receiving data [1,2]. It tremendously reduces the need for wired connections. In the case of ad-hoc networks, hop radio relays operate in non-infrastructure. On the other hand, in distributed mode, the base station will coordinate the node for an efficient data transmission purpose. Though different information services are available, VANETs ensures precise data sharing via localizing in time and space based on the demand of users. Typically, VANET performs under certain resource constraints [3,4]. Since the vehicular nodes are scattered, the efficiency of the energy is not administered. Each node in the sensing field makes the decision based on the computing and communicating capabilities of the sensor node. A vehicular node collects and forwards the data to other vehicular nodes in the network. It develops a congested scenario in the specified area network [5]. The deployment of clustering algorithms in VANETs resolves network scalability, availability and mainly avoids network congestion [6,7]. Numerous advantages of clustering algorithms in VANETs ensure the lower implementation cost, support for remote communication, easy use of new data sources, and better accuracy. Most wireless networks operate on event-driven instead of time-driven [8,9]. In some cases, event-driven models are inefficient for completing monitoring services. Localization techniques are pretty helpful for information transmitting services.
1.1. Vanet’s Architecture
The wireless communication between vehicles and roadside infrastructure is conducted by WAVE protocol [10,11]. The significant elements of VANETs are the Application Element (AE), On-Board Element (OBE), and Road Side Element (RSE) (refer Figure 1). The role of Road Side Unit (RSU) is to provide service to the users of the vehicles, and the vehicles make use of that service through OBE. The messages are passed, processed, and disseminated with the deployed OBE and the vehicles. Furthermore, RSU associates with web technologies to accommodate the diverse set of services to the vehicle users. These elements are described in brief as follows:
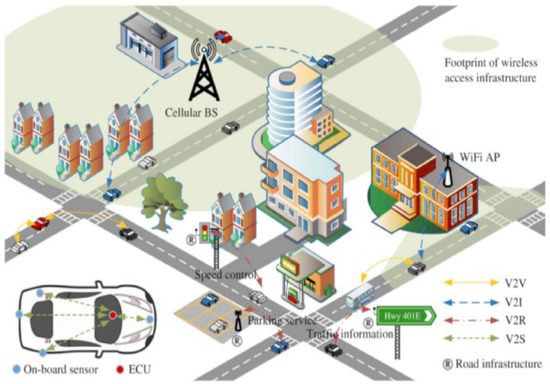
Figure 1.
VANET’s Architecture.
1.1.1. On-Board Element
The task of OBE is to associate between the vehicles and RSE consistently. In general, it works on WAVE protocol. In addition to that, a processor with better computing ability, user interface, and memory is used. A short communication range wireless tool is used to communicate wirelessly using the 802.11p protocol. It also merges with other OBE and RSEs for communication purposes. The core functions of OBEs are IP mobility, reliable message dissemination, congestion avoidance, and data security.
1.1.2. Application Element
The task of AEs is to support the IP mobility and verification and to improvise the communication units of OBEs [12]. It is equipped with any Personal Digital Assistant (PDA) to execute real-time applications.
1.1.3. Road Side Element (RSE)
RSEs behave like physical network devices dedicated to roadside locations such as junctions, parking slots, gas stations, etc. It is a device that holds standards of WAVE protocol. The functionality of RSU involves V2I or Infrastructure to Vehicle (I2V) communication and Internet connectivity. The RSUs may be interconnected and further connected with the Internet to provide various services such as multimedia data sharing and a variety of web services.
1.2. Vanet’s Layers
Most VANETs communication follows the IEEE 802.11p standard, which is shown in Figure 2 [13,14]. It comprises five layers, namely; the application layer, transport layer, network layer, data link layer, and physical layer. Each layer has its own characteristics. In short, the physical layer is the top layer that takes raw data as input. The data link layer contributes to converting data into several packets. Routing protocols are defined in the network layer, and communication between network entities is given in the transport layer. The services of the above layers are integrated and coordinated with real-time applications. Here, the network and transport layers are the core layers of VANET systems [15,16,17]. The routing layer (or) network layer is responsible for defining rules for packet transmission systems. The researchers suggest different types of routing protocols. The main focus of the routing layer is to allow for scalability and integrity of the shared data in road networks. Once the routing protocols are efficiently designed, the communication protocols determine the success rate of the VANET systems.
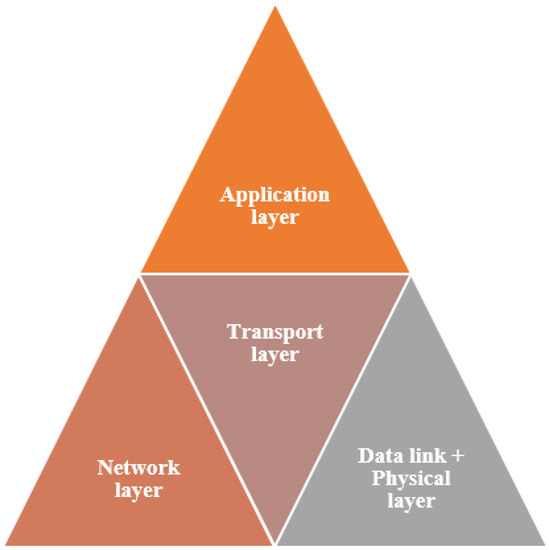
Figure 2.
VANET’s Layers.
1.3. Types of VANET Communication
The communications in VANETs are explained as follows:
- Vehicle to any entities communication (V2A): The deployed vehicular nodes communicate with RSU [18] with the assistance of any centralized control, which is capable of monitoring and managing the local and global data of traffic and road constraints. It is restricted to communicate directly with similar vehicular nodes to prevent real-time issues like congestion and overheads.
- Vehicle to Vehicle communication (V2V): With the help of broadcasting protocols like unicast and multicast, the vehicles can directly communicate with other vehicles.
- Hybrid communication [19]: It combines the features of V2A and V2V communication models by extending the services of the RSU and OBU.
1.4. Fundamentals of Clustering Approaches
The Internet has become an essential factor in VANET communication for navigation and maintenance of the vehicular nodes. Access Points (AP) coordinate with network entities to achieve scalable and reliable communication paths [20,21]. It is well-known that short communication paths are widely studied that explore real-time issues like collision, improper communicator operations, anomalies invasion, and disconnected infrastructures. It becomes non-viable for real-time applications. Due to the failures of AP, the organization of vehicular nodes during the communication process gets interrupted. Cluster-Based Dissemination (CBD) [22] is one of the eminent approaches widely adopted by many researchers. In simple words, the vehicular nodes are labelled under a set of clusters wherein the CH collects and forwards the data to its neighboring CHs. The categorization of vehicular nodes located in a geographical area based on mobility-related metrics is known as clustering. The central theme of the clustering task is to make the vehicular network more reliable and scalable [23]. It includes two elements, namely, CH and Cluster Member (CM). CHs are elected by the node’s member. The main responsibility of CHs is to coordinate with the node’s member internal and external clusters. Some clustering schemes permit that CHs should look for additional functionalities according to the criteria of the network routings. The CMs forward the network information at certain time intervals. Figure 3 shows cluster formation. The merits of the clustering approach are [24]:
- Minimizes the effects of broadcast storm
- High packets delivery ratio
- Efficient broadcasting nature
- Reduces the message relay
- Reduces the communication and computational overheads
- Supports large and small-scale networks.
- Decreases contention and hidden station issues
- Enhancement in QoS based routing
- Adaptive to dynamic topology changes
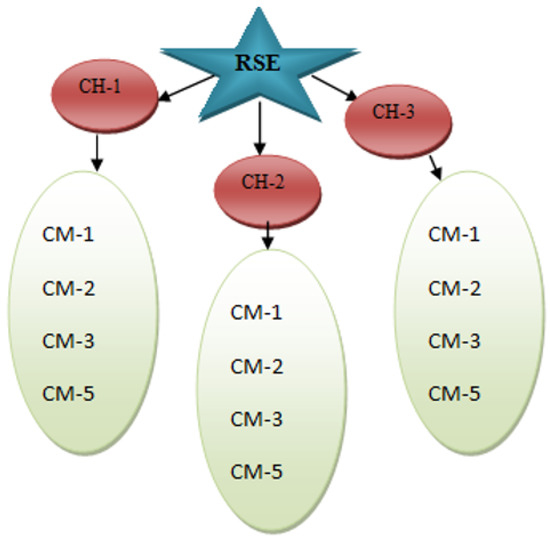
Figure 3.
Cluster Formation.
The cluster size is not equal for all clusters because it is varied by communication range and transmission devices. Cluster Stability (CS) [25] is an eminent performance measure employed to scale the network models. Cluster stability is a kind of management process wherein the adaptation of CHs and their associated CMs with respect to time. The tasks of the clustering approach are to follow the routing principles in a simplified way, well-organized allocation of resources, and the administration of network systems. The improvements completed in network capacity and the spatial channel reuse by considering the inter and intra-cluster transmission models. The design of the clustering algorithm should ensure the lower communication overhead and an excellent cluster administration process under dynamic topology. It motivates us to develop a novel clustering technique for organizing and efficient- energy constraints.
1.5. Contribution of the Study
The innovations of this research study are:
- A random initialization of cluster formation is eliminated by considering the road length and transmission.
- A new performance metric is framed that ensures a stable cluster head selection process. If the node is found to be unstable, it is intelligently excluded.
- The elected CH should take the responsibility of network administration that could avoid the link failure and also ensure a better re-clustering process.
- The incorporation of cosine -based node uncoupling frequency has minimized the incongruity between vehicular nodes placed in dense and sparse zones of highways.
1.6. Organization of the Study
The rest of the sections are arranged as follows: Section 2 presents a review of existing techniques by stating their merits and demerits. It helps to find the research challenges prevailing in this environment. Section 3 presents the research methodology that gives a clear idea about the practical solutions to the above-stated research challenges. Section 4 presents the experimental analysis that discusses the programming languages, simulation parameters, and network assumptions used for proving the efficiency of the proposed communication model. Section 5 presents the conclusion of the proposed model and its recommendations.
2. Related Work
This section presents a review of existing techniques from the aspects of Cluster Head Selection (CHS) approaches and Message Dissemination (MD) approaches.
2.1. CHS Approaches
The mobility-aware Single Hop Clustering (MOSIC) technique accommodates the global network topology and improves scalability [26]. Gaussian Markov Mobility (GMM) is employed to find out the mobility relative of the vehicles to form stable clusters. The designed technique has increased the duration of CH and CM in the long term and controlled the overheads. It does not perform better in urban traffic scenarios. A self-organized clustering architecture [27] for dense traffic scenarios is studied using a 1-hop clustering approach. The designed CHS algorithm includes the independent set problem and secret-key agreement scheme. The distributed clustering architecture has ensured network communication efficiency. However, the CHs are easily compromised by passive attackers. According to the needs of traffic scenarios, a Chain Branch Leaf (CBL) clustering scheme [28] is designed to increase the CH’s stability by aligning with the relative variables of vehicular nodes. It supported both unicast and multicast message exchange services. However, the designed CBL could not cope up with the heavy traffic conditions.
The frequent network topology changes have considerably affected the CH stability. The time variations in inter-vehicles were studied using the stochastic mobility model [29]. They projected the estimated time variations into the Markov chain system with the distance metric. Finally, they observed the behaviors of clustered nodes using queuing theory. Though the designed model has ensured proper communication, the un-clustered nodes near neighboring CHs have increased the overheads. Moth Flame Optimizer [30] is studied to develop an intelligent clustering environment. The behavior of moth flame is employed to select the CH. It minimizes the routing cost for the entire network’s communication by efficiently reducing the required number of clusters. The mobility characteristics of the vehicular nodes are limited that could not suit the real-time traffic scenarios. An adjusted k-medoids clustering scheme [31] is designed to ensure the CH’s stability and routing link quality. Here, the frequency of node disconnection is used to estimate the k-values. This model has achieved more stability and robustness with the high convergence data speed.
In coordination with the technological improvements, the Internet of Vehicles (IoVs) has emerged in conventional VANETs. To enhance the performances of Inter-Vehicular communication systems, a multi-hop clustering scheme [32] is designed. Here, the RSUs were prepared according to the traffic needs. The messages are broadcasted under the multi-hop neighbor approach. The mobility of vehicular nodes was estimated using the breadth-first search algorithm that included the CHS and CH duration. It is evaluated using NS-2 and VANETMobiSim tools. The message delivery ratio is higher in regular road traffic than heavy road traffic due to the global network information. The combination of dynamic and stability-based clustering schemes [33] is designed for urban city scenarios. The formation of a temporary CH and the safe distance threshold estimation has increased cluster stability performance. Compared with the lowest-ID algorithm, it proved the stability performance in terms of better cluster member disconnection frequency and efficiency. The concept of the multi-hops model is not studied under data aggregation and dissemination. The clusters efficiency was analyzed using a direction-aware clustering scheme [34]. Clusters were administered independently and reconfigured locally according to the traversal of vehicles. The invasions of channel access and allocated time slots to the cluster members have significantly improved the cluster stability in a dynamic environment. In order to ensure better channel access, the CM makes use of Control Channel Period (CCP) and Service Channel Period (SCP).
Many studies have considerably studied CH formation rather than CHS and management. In safety applications, the management of unstable clusters is essential. It is checked by introducing the Enhanced Weight-based Clustering Algorithm (EWCA) [35]. Here, each vehicle was interlinked with the predefined weight value based on its energy level. The vehicle that has the highest weight value is the selected primary CH. By doing so, the author has observed 40–50% improved performance in cluster stability. However, the message delivery rate has been reduced due to security constraints. A resilient Double-Head Clustering (DHC) [36] algorithm was designed to increase cluster stability and management. Along with the mobility-related metrics, the analysis of Link Expiration Time (LET) and the Signal-to-Noise Ratio (SNR) has been estimated to manage the dynamic CHs. The DHC model has improved the communication efficiency in dynamic urban scenarios over prior schemes. Yet, the packet loss reduction needs to be more focused under different traffic conditions.
2.2. MD Approaches
Inefficiency in immediate message dissemination in urban and highway scenarios was observed. Hence, the RTVC framework [37], which consists of a VANET cluster scheme (VCS) and VANET multicast routing (VMR) were designed. It has enhanced the link quality of the communication process, high mobility, and better throughput rate. The vehicle speed’s adjustment has achieved the objectives of stability, efficiency, and message dissemination. Due to dynamic topology, the packet delivery rate is still in the developmental stage, especially in the fast mobility of nodes. Therefore, Clustering and Probabilistic Broadcasting (CPB) [38] is designed to exchange information under sufficient connection duration. Connection duration limit is estimated from the aggregation of probability-based data obtained from CH and CM. This scheme has significantly reduced the packet loss and the overlapping in clusters formation. In [39], the segment-based safety message broadcasting for clustered VANET environment is studied. The study explored the cluster formation, collision avoidance, and safety message broadcasting in developing a stable vehicular environment. CH formation is conducted by Variant-Based Clustering (VBC), and it is elected by the Chaotic Crow Search (CCS) algorithm. Segment-based Forwarder Selection (SFS) scheme is deployed to broadcast the safety message via the optimized channel. It acted as an optimizer using the Fuzzy-Vikor method. The simulated experiments have proven the cluster stability and reduced the broadcast storm and network collision issues. Compared to the previous models, the designed model has shown 55% improved performance.
Advanced Speed and Density Warning Message (ASDWM) scheme [40] was designed to suit highway scenarios. The developed model, related to the road condition and vehicle speed, delivered the warning messages. By doing so, the authors have achieved the issue of rebroadcasting and Reachability of vehicles. Additionally, low end-to-end latency is achieved during the broadcasting process. Compared to the message flooding scheme, the ASDWM scheme has shown considerable effects. However, it is not suitable for real-life scenarios. Dedicated Short-Range Communication (DSRC) technology is deployed to integrate the cluster-based VANETs with 5G cellular networks. SDN-Enabled Social-Aware Clustering (SESAC) algorithm [41] in the 5G-VANET system is designed to enhance the cluster’s stability by predicting the social patterns of vehicles routes. The movement of vehicles at each round was monitored and assessed using the discrete time-homogeneous semi-Markov model. Simulations experiment on cluster overhead with cluster velocity, and density at different road conditions were observed. It has had a positive impact on node connectivity. However, the designed model has used a high communication range.
A cross-layer cluster-based routing approach [42] is studied to deliver multimedia data for reliable VANETs. The author has suggested a Cross-Layer Autonomous Route Recovery (CLARR) mechanism and a new Cross-Layer Cluster-based Routing (CCBR) protocol. The results have stated that 60% improved performance in reducing the overall communication delay tested under diverse vehicle velocity and density sets. A hybrid clustering algorithm that included geographic- and context-based clustering approaches [43] was studied to minimize the effects of control overhead and network traffic. The deployment of inter-clustering routing is to have predefined details on destination nodes. The experimental results have shown more minor delays in lower and higher vehicular speeds than the conventional schemes. And also, fewer control messages are used for message aggregation and dissemination. A Prediction-based Multi-Role Classification community clustering method (PMRC) [44] was designed to assist healthcare applications. Low stability and high data distortion were observed in medical vehicles. The load balancing approach is employed to know the mobility-related metrics on medical vehicles. Based on the roles, the vehicles were clustered. The vehicles with high loads were organized using CH and gateway nodes. The system achieved the objectives of improving the packet delivery rate, thereby reducing data distortion. Intelligent cluster head routing protocol (ICHR) [45] is designed to enhance network connectivity in the case of RSUs failure. They recommended alternate paths by introducing Chain-based Ant Colony Optimization (C-ACO). They considered the density and speed of nodes and the distance from RSUs to select the CH. The system has achieved better connectivity time, cluster stability, and critical message transmission for highway scenarios.
From the above conducted reviews, it is understood that the development of clustering-based approaches needs to be explored. The research questions answered in this article are as follows:
- What are the significant parameters considered for proposing clustering algorithms?
- What’s the use of merging multiple parameters to select CHs and CM during clustering maintenance phase?
Many factors distort the clustering process such as immediate amendments in network topology, forecasting the directions, scalability, signal fading loss, behavior of drivers, lifetime of network entities and the mobility pattern of high speed vehicles. With the help of clustering schemes, the choice of forecasting the network parameters is a difficult task. An improper selection of CHs and CMs has a strong influence over the packet loss and delayed transmission.
3. Proposed Framework
3.1. System Model
Let us assume highly dynamic VANETs, where Vc is the count of vehicles distributed arbitrarily over a unidirectional multi-lane highway. All vehicles are equipped with preinstalled intelligent devices, namely, Global Positioning System (GPS) and IEEE 802.110p using OBUs. It helps to track and communicate with other network entities by means of location assessment. Moreover, RSUs are also installed with an equal distance to cover the whole highway. The role of RSUs is to ensure the network connectivity of all deployed vehicles and also network coverage for V2X communication. Likewise, speed and arrival rate of vehicles follow normal distribution and poisson distribution. Exponential distribution is employed to assess the inter-arrival time and spacing between vehicles. Link reliability and connectivity are the two significant metrics that measures the performance of highly dynamic networks. The vehicle’s arrangement determines the efficiency of link reliability and connectivity which is promoted by designing an efficient clustering approach. Refer Figure 4 for clear depiction of proposal.
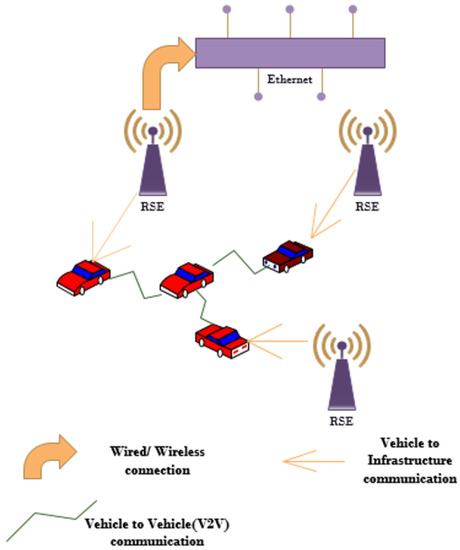
Figure 4.
Proposed VANET architecture.
Cluster stability is a Quality of Constraints (QoS) that determines the efficacy of the proposed clustering approach. Here, there are two entities, namely, CH and CM. CH is responsible for data transmission and route computing in its cluster. Therefore, a novel k-medoid clustering scheme is designed to select an efficient CH. Each cluster data point denotes one of the data points in the current VANET region, and these points are labelled as ‘cluster medoids’. The proposed k-medoid clustering scheme helps to select the efficient CH and thus, the clusters are also created.
3.2. Proposed Working
The phases of proposed approach are explained as follows:
3.2.1. Initialization
This phase dictates the estimation of initial clusters, their sizes and the location of their relevant CHs. The vehicles may have multiple destinations in the case of the highway. The scattered road in the highway has been used for exit purpose. Therefore, density at entrance and exit is always greater than in the middle of the highway.
- Estimating the count of initial clusters: Depending on the length of highway (L) and the available transmission ranges (TR), the initial count of clusters (c) is computed as,where N denote number of used transmission ranges.
- Mentioning the volume of the initial clusters: Generally, the cluster’s volume will vary to the location automatically and also density varies from one zone to another. In order to achieve the greater network coverage without any traffic issues, we intend to assign large clusters in the middle of highway and small clusters at extremities. Based on the available transmission ranges, the size of the cluster is determined for the highway’s middle. On the other hand, by moving toward extremities, the size decreases gradually to take the value of the smallest one.
- Mentioning the locations of the initial CHs: CHs will not be elected randomly. The nearest nodes to the centroid will be considered as the CHs. The largest transmission range is considered in the case of equal centroid appears.
3.2.2. Formation of Clusters
The node’s assignment to the clusters has to be validated, how far it is similar to the CH. In order to join a cluster, the Similarity Value (SV) is considered, which includes direction, speed difference, and proximity, which is computed as:
where, , and are the relative importance of difference in direction, speed and proximity. It is determined by the vehicles’ user on the road.
Direction: It is a Boolean variable that determines whether the vehicle follows the same direction with respect to CH.
speed: With respect to time ‘t’, the difference in speed between node and its CH.
Here, the mobility of any vehicle is estimated as,
proximity: It refers to distance between the CH and CM. In this study, we introduce an adjusted similarity metric between two vehicular nodes, (, ) and (, ).
where, , It implies the dot product of vectors .
and , It implies the length of the vectors .
, cross product of the two vectors
The role of the novel, ‘cosine-based node uncoupling frequency’ is to remove the incongruity between the placed vehicular nodes under a multi-dimensional network environment. It is achieved by finding the angle measurement of vehicular nodes at the intra communication layer. The lower the SV, the less angle there is between the vehicles. The higher SVs are excluded in this study.
3.2.3. Maintenance of Clusters
In a highway environment, the nodes are moving incessantly and this causes disconnections and also overhead issues. To resolve this issue, this phase contains two steps, namely, cluster head control and re-clustering.
- Cluster Head Control CHs are swapped by relying on time and also electing the best substitute node. The node that has the greatest weight is considered as the new CHs. And also, the stability of the cluster is ensured by filtering the nodes according to its previous behavior. The CH weight is measured as:where, are the relative importance direction, speed, TR, node uncoupling frequency and CM. Here,
- Direction: The CH holds the members that have the similar directions. The speed of the vehicles decreases eventually in the highway environment. The decreased speed impacts the metric direction.
- Speed: It indicates the deviation in speed. The vehicular nodes that have the closest speed will be treated as the CMs.
- TR: It helps to establish the network topology and also influences the network connectivity. The TR of vehicular nodes decreases gradually in dense environments.
- Node uncoupling frequency: It decides the stability of the clusters.
- Re-clustering process: The re-clustering process is initiated in the case of unstable CH’s performance. The Figure 5 presents the workflow of the proposed self-reliable k-medoid clustering schemes.
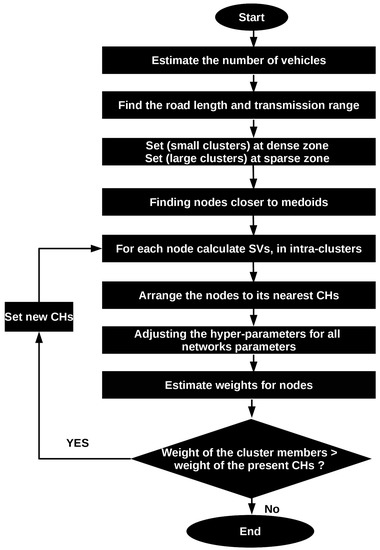 Figure 5. Workflow of Proposed Technique.
Figure 5. Workflow of Proposed Technique.
4. Experimental Results
This section presents the simulation setup, performance measures and the state-of-the-art methods. The vehicles are traversed in two-lane roads with the guide of GPS maps. The initial location and the distribution of vehicles are randomly placed in the simulation environment. Moreover, the distance between vehicles traversing in a similar direction is also considered.
4.1. Configuring the Simulation
In order to evaluate the proposed k-medoid clustering scheme, simulations have been carried out using Network Simulator (NS-2). The simulation is conducted in a highway road by altering the density from 30 to 100 vehicles per km and the 30 m/s speed. The Figure 6 shows some sample screenshots of NS2 and Table 1 illustrates the simulation parameters.
Figure 6.
Sample screenshots in NS2.

Table 1.
Simulation Parameters.
4.2. Simulation Results
The proposed k-medoid clustering scheme is evaluated with the state-of-the-art methods such as RTVC [37] and ECHS [46] schemes. The efficiency of the k-medoid clustering scheme is analyzed with the six performance metrics. They are:
- Cluster Head Lifetime: It indicates the time taken to change the state of the vehicles from cluster head to non-cluster head.
- Cluster Member Lifetime: It indicates the time taken to assess the state of the change to join (or) leave the cluster.
- Cluster Number: It assesses the count of clusters formed during the network formation.
- Packet Loss Ratio: It indicates the count of sent packets to the count of received packets at the destination-side in a given period.
- Cluster Overhead: It displays the overhead prevails during formation and administration of clustered environment.
- Average Packet Delay: It indicates the delayed time taken to reach the source vehicle from the destination vehicle.
4.3. Results and Discussion
4.3.1. Cluster Head Lifetime
Here, the lifetime of the cluster head under vehicle speed 30 m/s and 300 m transmission ranges are compared.
Table 2 and Figure 7 presents the CHL of the proposed technique with the existing techniques, namely, RTVC and ECHS under different vehicle speeds with transmission range 300 m. The change in the vehicle speed brings a significant change in the topology of vehicular network. It could affect the lifetime of the CH because of the connectivity issues of CM. The results portray that the wider network coverage increases the CH lifetime by ensuring a better connectivity maintenance of the CM. It drastically lessens the count of joining/leaving the vehicles under a clustered environment. Since the proposed technique imposes a better CHS process, the CHL is greatly achieved.
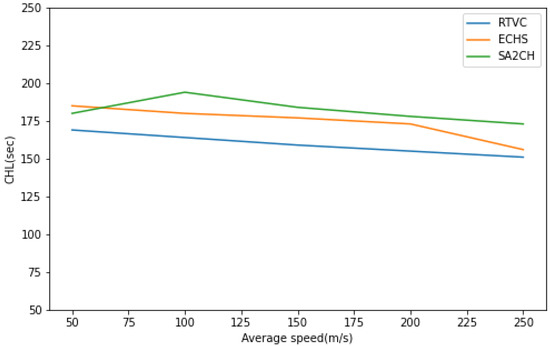
Figure 7.
Comparative graph of CHL between the existing and proposed technique.
Table 2.
Analysis of CHL.
Table 2.
Analysis of CHL.
| CHL (seconds) | Average Speed | RTVC | ECHS | SA2-CS |
|---|---|---|---|---|
| 50 | 50 | 169 | 185 | 180 |
| 100 | 100 | 164 | 180 | 194 |
| 150 | 150 | 159 | 177 | 184 |
| 200 | 200 | 155 | 173 | 178 |
| 250 | 250 | 151 | 156 | 173 |
4.3.2. Cluster Member Lifetime
Table 3 and Figure 8 presents the CML analysis between proposed and existing techniques, namely, RTVC and ECHS under different vehicle speeds with transmission range 300 m. Similar to the CHL, the CML also increases when there is no network connection disruption. It is clearly observed that the proposed technique outperforms RTVC and ECHS both.
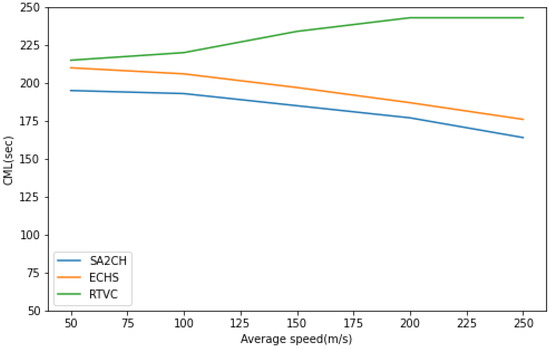
Figure 8.
Comparative graph of CML between the existing and proposed technique.
Table 3.
Analysis of CML.
Table 3.
Analysis of CML.
| CML (seconds) | Average Speed | RTVC | ECHS | SA2-CS |
|---|---|---|---|---|
| 50 | 50 | 195 | 210 | 215 |
| 100 | 100 | 193 | 206 | 220 |
| 150 | 150 | 185 | 197 | 234 |
| 200 | 200 | 177 | 187 | 243 |
| 250 | 250 | 164 | 176 | 243 |
4.3.3. Cluster Number
The Table 4 and Figure 9 depicts the analysis of CN considered between proposed and existing techniques. The limited use of cN has positively impacted the network performances. It is observed from the above results, that the uninterrupted network connection with the wider support of CHL and CML will make use of decreased CN.
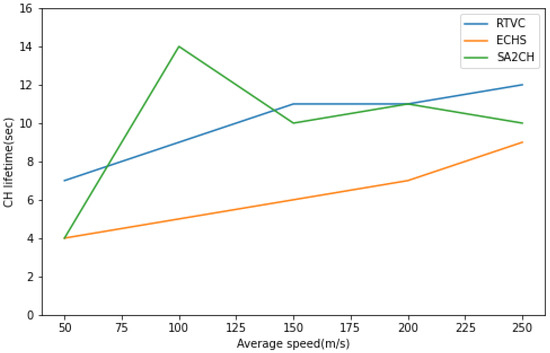
Figure 9.
Comparative graph of CN between the existing and proposed technique.
Table 4.
Analysis of Cluster Number.
Table 4.
Analysis of Cluster Number.
| CN | Average Speed | RTVC | ECHS | SA2-CS |
|---|---|---|---|---|
| 2 | 50 | 7 | 4 | 4 |
| 8 | 100 | 9 | 5 | 14 |
| 12 | 150 | 11 | 6 | 10 |
| 16 | 200 | 11 | 7 | 11 |
| 20 | 250 | 12 | 9 | 9 |
4.3.4. Packet Loss Ratio
Table 5 and Figure 10 shows that by changing the vehicles count and the transmission range set to 300 m, the PLR analysis is estimated. It is clearly observed that the PLR increases to the count of the vehicles. The chance of packet collision under same wireless channel increases the PLR. Since the proposed technique makes use of the lowest CN with better CHL and CML, a minimized PLR is achieved.
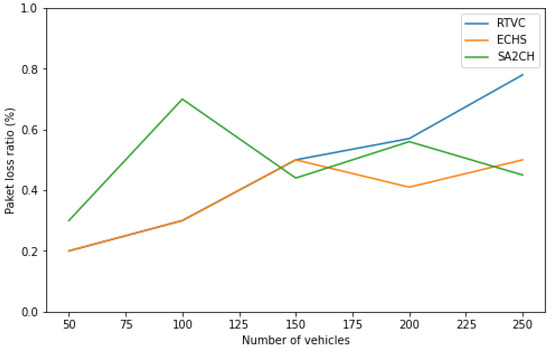
Figure 10.
Comparative graph of PLR between the existing and proposed technique.
Table 5.
Analysis of Packet Loss Ratio.
Table 5.
Analysis of Packet Loss Ratio.
| Packet Loss Ratio | Number of Vehicles | RTVC | ECHS | SA2-CS |
|---|---|---|---|---|
| 0.2 | 50 | 0.2 | 0.2 | 0.3 |
| 0.4 | 100 | 0.3 | 0.3 | 0.7 |
| 0.6 | 150 | 0.5 | 0.5 | 0.44 |
| 0.8 | 200 | 0.57 | 0.41 | 0.56 |
| 1 | 250 | 0.78 | 0.50 | 0.45 |
4.3.5. Cluster Overhead
Table 6 and Figure 11 presents the overhead analysis of clustering between existing and proposed techniques. It is clearly observed that the proposed technique outperforms the prior clustering schemes. The removal of random initial set of clusters has positively influenced the clustering environment.
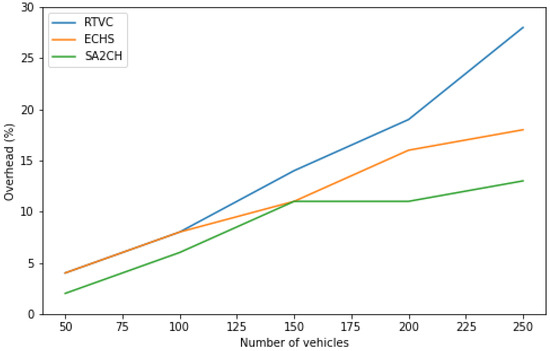
Figure 11.
Comparative graph of CO between the existing and proposed technique.
Table 6.
Analysis of Cluster Overhead.
Table 6.
Analysis of Cluster Overhead.
| Overhead (%) | Number of Vehicles | RTVC | ECHS | SA2-CS |
|---|---|---|---|---|
| 5 | 50 | 4 | 4 | 2 |
| 15 | 100 | 8 | 8 | 6 |
| 20 | 150 | 14 | 11 | 11 |
| 25 | 200 | 19 | 16 | 11 |
| 30 | 250 | 28 | 18 | 13 |
4.3.6. Average Packet Delay
It is observed from Table 7 and Figure 12 that the proposed technique has achieved a minimized delay by varying the count of vehicles. A high clustered stability is achieved only when there is a proper coordination between CH and CMs.
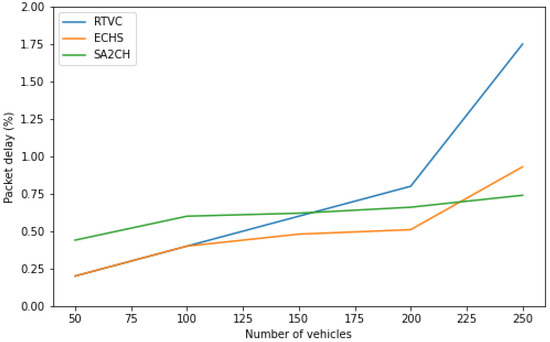
Figure 12.
Comparative graph of APD between the existing and proposed technique.
Table 7.
Analysis of Average Packet Delay.
Table 7.
Analysis of Average Packet Delay.
| Packet Delay(sec) | Number of Vehicles | RTVC | ECHS | SA2-CS |
|---|---|---|---|---|
| 0 | 50 | 0.2 | 0.2 | 0.44 |
| 0.5 | 100 | 0.4 | 0.4 | 0.60 |
| 1 | 150 | 0.6 | 0.48 | 0.62 |
| 1.5 | 200 | 0.8 | 0.51 | 0.66 |
| 2 | 250 | 1.75 | 0.93 | 0.74 |
5. Conclusions
The high mobility of nodes and the environment variables on highways, urban and residential systems have negatively influenced the network stability and scalability. This paper proposes a novel self-adaptable Angular based k-medoid Clustering Scheme (SAACS) for large-scale and dynamic VANETs that can form clusters from small to large scale by incessantly monitoring the road statistics. Irrespective of the present network route status, the proposed technique includes three significant improvements that accommodate the diverse set of routing environments:
- The road length and transmission ranges form the initial cluster that eliminates the end-to-end delay.
- The proposed technique introduces a novel performance metric, ‘cosine-based node uncoupling frequency’ in the cluster head election process that picks the stable CH. If the node is found to be unstable, it is intelligently excluded.
- The elected CH should take responsibility for network administration to avoid link failure and ensure a better re-clustering process.
The incorporation of ‘cosine-based node uncoupling frequency’ has minimized the incongruity between vehicular nodes placed in dense and sparse zones of highways. The simulation analysis varies the number of vehicular nodes with the transmission range. The experimental results have proven that the proposed technique serves better than the other existing approaches. In the future, the study can be extended by analyzing the Intrusion Detection Systems (IDS) under meta-heuristic modeling. The proposed model could be more trustworthy as it is capable and reliable in terms of attacks.
Author Contributions
Conceptualization, A.B.and M.M.; methodology, K.C.P.; software, M.M.; validation, M.M. and P.M.; formal analysis, A.B. and K.C.P.; investigation, M.M.; resources, P.M.; data curation, A.B. and K.C.P.; writing—original draft preparation, A.B. and K.C.P.; writing—review and editing, M.M. and P.M.; visualization, A.B.; supervision, M.M. and P.M.; project administration, A.B., K.C.P. and M.M.; funding acquisition, M.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Jia, D.; Zhu, H.; Zou, S.; Hu, P. Dynamic cluster head selection method for wireless sensor network. IEEE Sens. J. 2016, 16, 2746–2754. [Google Scholar] [CrossRef]
- Mittal, M.; Kumar, K. Delay Prediction in wireless sensor network routing using ART1 neural network. Afr. J. Comput. ICT 2015, 8, 175–180. [Google Scholar]
- Wang, H.; Chen, Y.; Dong, S. Research on efficient-efficient routing protocol for WSNs based on an improved artificial bee colony algorithm. IET Wirel. Sens. Syst. 2017, 7, 15–20. [Google Scholar] [CrossRef]
- Mittal, M.; Srinivasan, S.; Rani, M.; Vyas, O.P. Type-2 fuzzy ontology-based multi-agents system for wireless sensor network. In Proceedings of the TENCON 2017–2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017; pp. 2864–2869. [Google Scholar] [CrossRef]
- Murugaanandam, S.; Ganapathy, V. Reliability-based cluster head selection methodology using fuzzy logic for performance improvement in WSNs. IEEE Access 2019, 7, 87357–87368. [Google Scholar] [CrossRef]
- Ahmad, N.; Javaid, N.; Khan, Z.A.; Qasim, U.; Alghamdi, T. 2: Routing scheme to maximize lifetime and throughput of wireless sensor networks. IEEE Sens. J. 2014, 14, 3516–3532. [Google Scholar] [CrossRef]
- Iwendi, C.; Khan, S.; Anajemba, J.H.; Mittal, M.; Alenezi, M.; Alazab, M. The use of ensemble models for multiple class and binary class classification for improving intrusion detection systems. Sensors 2020, 20, 2559. [Google Scholar] [CrossRef]
- Mittal, M.; Saraswat, L.K.; Iwendi, C.; Anajemba, J.H. A neuro-fuzzy approach for intrusion detection in energy efficient sensor routing. In Proceedings of the 4th International Conference on Internet of Things: Smart Innovation and Usages (IoT-SIU), Ghaziabad, India, 18–19 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Bharathy, M.; Rao, K. One-leap fuzzy enabled clustering technique for underwater wireless sensor networks to improve the stability and energy exhaustion ate of the nodes. J. Phys. Conf. Ser. 2019, 1172, 12080. [Google Scholar] [CrossRef]
- Mittal, M.; Kumar, K. Quality of services provisioning in wireless sensor networks using artificial neural network: A survey. Int. J. Comput. Appl. 2015, 117, 28–40. [Google Scholar] [CrossRef]
- Elira, B.; Keerthana, K.; Balaji, K. Clustering scheme and destination aware context based routing protocol for VANET. Int. J. Intell. Netw. 2021, 2, 148–155. [Google Scholar] [CrossRef]
- Anajemba, J.H.; Iwendi, C.; Mittal, M.; Yue, T. Improved advance encryption standard with a privacy database structure for IoT nodes. In Proceedings of the 9th International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 10–12 April 2020; pp. 201–206. [Google Scholar]
- Mittal, M.; de Prado, R.P.; Kawai, Y.; Nakajima, S.; Muñoz-Expósito, J.E. Machine learning techniques for energy efficiency and anomaly detection in hybrid wireless sensor networks. Energies 2021, 14, 3125. [Google Scholar] [CrossRef]
- Cooper, C.; Franklin, D.; Ros, M.; Safaei, F.; Abolhasan, M. A comparative survey of VANET clustering techniques. Commun. Surv. Tutorials 2017, 19, 657–681. [Google Scholar] [CrossRef]
- Doolan, R.; Muntean, G. EcoTrec-A novel VANET-based approach to reducing vehicle emissions. Trans. Intell. Transp. Syst. 2017, 18, 608–620. [Google Scholar] [CrossRef]
- Javed, A.R.; Sarwar, M.U.; Khan, S.; Iwendi, C.; Mittal, M.; Kumar, N. Analyzing the effectiveness and contribution of each axis of tri-axial accelerometer sensor for accurate activity recognition. Sensors 2020, 20, 2216. [Google Scholar] [CrossRef]
- Sanguesa, J.; Barrachina, J.; Fogue, M.; Garrido, P.; Martinez, F.; Cano, J.C.; Calafate, C.; Manzoni, P. Sensing traffic density combining V2 V and V2I wireless communications. Sensors 2015, 15, 31794–31810. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Chen, Y. A self-adaptive traffic light control system based on speed of vehicles. In Proceedings of the IEEE International Conference on Software Quality, Reliability and Security Companion (QRS-C), Vienna, Austria, 1–3 August 2016; pp. 382–388. [Google Scholar]
- Kwon, J.H.; Chang, H.; Shon, T.; Jung, J.J.; Kim, E.J. Neighbor stability-based VANET clustering for urban vehicular environments. J. Supercomput. 2016, 72, 161–176. [Google Scholar] [CrossRef]
- Liu, G.; Qi, N.; Chen, J.; Dong, C.; Huang, Z. Enhancing clustering stability in VANET: A spectral clustering based approach. China Commun. 2020, 17, 140–151. [Google Scholar] [CrossRef]
- Mittal, M.; Iwendi, C.; Khan, S.; Rehman Javed, A. Analysis of security and energy efficiency for shortest route discovery in low-energy adaptive clustering hierarchy protocol using Levenberg-Marquardt neural network and gated recurrent unit for intrusion detection system. Trans. Emerg. Tel. Tech. 2020, 32, e3997. [Google Scholar] [CrossRef]
- Kandali, K.; Bennis, L.; Bennis, H. A new hybrid routing protocol using a modified Kmeans clustering algorithm and continuous hopfield network for VANET. IEEE Access 2021, 9, 47169–47183. [Google Scholar] [CrossRef]
- Chauhan, S.; Mittal, M.; Woźniak, M.; Gupta, S.; Pérez de Prado, R. A technology acceptance model-based analytics for online mobile games using machine learning techniques. Symmetry 2021, 13, 1545. [Google Scholar] [CrossRef]
- Raja, M. PRAVN: Perspective on road safety adopted routing protocol for hybrid VANET-WSN communication using balanced clustering and optimal neighborhood selection. Soft Comput. 2020, 25, 4053–4072. [Google Scholar] [CrossRef]
- Azat, B.; Hong, T. Destination based stable clustering algorithm and routing for VANET, 08. J. Comput. Commun. 2020, 8, 1. [Google Scholar] [CrossRef]
- Ziagham, A.; Noorimehr, M. ‘MOSIC: Mobility-aware single-hop clustering scheme for vehicular ad hoc networks on highways. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 424–431. [Google Scholar] [CrossRef]
- Caballero-Gil, C.; Caballero-Gil, P.; Molina-Gil, J. Self-organized clustering architecture for vehicular ad hoc networks. Int. J. Distrib. Sens. Netw. 2015, 11, 384869. [Google Scholar] [CrossRef]
- Rivoirard, L.; Wahl, M.; Sondi, P.; Berbineau, M.; Gruyer, D. CBL: A clustering scheme for VANETs. Adv. Veh. Syst. Technol. Appl. 2017, 19–25. [Google Scholar]
- Abboud, K.; Zhuang, W. Stochastic modeling of single-hop cluster stability in vehicular ad hoc networks. Trans. Veh. Technol. 2016, 65, 226–240. [Google Scholar] [CrossRef]
- Ishtiaq, A.; Ahmed, S.; Khan, M.; Aadil, F.; Maqsood, M.; Khan, S. Intelligent clustering using moth flame optimizer for vehicular ad hoc networks. Int. J. Distrib. Sens. Netw. 2019, 15, 155014771882446. [Google Scholar] [CrossRef]
- Hajlaoui, R.; Alsolami, E.; Moulahi, T.; Guyennet, H. An adjusted K-medoids clustering algorithm for effective stability in vehicular ad hoc networks. Int. J. Commun. Syst. 2019, 32, 1–16. [Google Scholar] [CrossRef]
- Senouci, O.; Aliouat, Z.; Harous, S. MCA-V2I: A multi-hop clustering approach over vehicle-to-Internet communication for improving VANETs performances. Future Gener. Comput. Syst. 2019, 96, 309–323. [Google Scholar] [CrossRef]
- Ren, M.; Khoukhi, L.; Labiod, H.; Zhang, J.; Vèque, V. A mobility-based scheme for dynamic clustering in vehicular ad-hoc networks (VANETs). Veh. Commun. 2017, 9, 233–241. [Google Scholar] [CrossRef]
- Mammu, A.; Hernandez-Jayo, U.; Sainz, N. Direction aware cluster-based multi channel MAC protocol for vehicular ad hoc networks. In Proceedings of the 2015 IEEE 11th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Abu Dhabi, United Arab Emirates, 19–21 October 2015; pp. 549–556. [Google Scholar]
- Tambawal, A.; Noor, R.; Salleh, R.; Chembe, C.; Oche, M. Enhanced weight-based clustering algorithm to provide reliable delivery for VANET safety applications. PLoS ONE 2019, 14, e0214664. [Google Scholar] [CrossRef]
- Alsuhli, G.; Khattab, A.; Fahmy, Y. Double-head clustering for resilient VANETs. Commun. Mob. Comput. 2019, 2019, 2917238. [Google Scholar] [CrossRef]
- Farooq, W.; Khan, M.; Rehman, S. A novel real time framework for cluster based multicast communication in vehicular ad hoc networks. Int. J. Distrib. Sens. Netw. 2016, 12, 8064908. [Google Scholar] [CrossRef]
- Liu, L.; Chen, C.; Qiu, T.; Zhang, M.; Li, S.; Zhou, B. A data dissemination scheme based on clustering and probabilistic broadcasting in VANETs. Communications 2018, 13, 78–88. [Google Scholar] [CrossRef]
- Alkhalifa, I.; Almogren, A. NSSC: Novel segment based safety message broadcasting in cluster-based vehicular sensor network. IEEE Access 2020, 8, 34299–34312. [Google Scholar] [CrossRef]
- Banikhalaf, M.; Hammad, R.A.; Ghaleb, B. An adaptive warning message scheme for emergency vehicles using vehicular ad hoc communication. Int. J. Eng. Technol. 2018, 7, 3182–3189. [Google Scholar]
- Qi, W.; Song, Q.; Wang, X.; Guo, L.; Ning, Z. SDN-enabled social-aware clustering in 5G-VANET systems. IEEE Access 2018, 6, 28213–28224. [Google Scholar] [CrossRef]
- Shafi, S.; Ratnam, D. A cross layer cluster based routing approach for efficient multimedia data dissemination with improved reliability in VANETs. Wirel. Pers. Commun. 2019, 107, 2173–2190. [Google Scholar] [CrossRef]
- Aravindhan, K.; Dhas, C. Destination-aware context-based routing protocol with hybrid soft computing cluster algorithm for VANET. Soft Comput. 2019, 23, 2499–2507. [Google Scholar] [CrossRef]
- Cheng, J. Research on the prediction-based clustering method in the community of medical vehicles for connected health. IEEE Access 2019, 7, 71884–71896. [Google Scholar] [CrossRef]
- Raut, C.; Devane, S. QoS Enhancement using intelligent cluster head selection routing technique in vehicular ad hoc networks in case of RSU failure. In Proceedings of the IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Indore, India, 16–19 December2018; pp. 1–6. [Google Scholar]
- Banikhalaf, M.; Khder, M.A. A Simple and robust clustering scheme for large-scale and dynamic VANETs. IEEE Access 2020, 8, 103565. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).