
Fault Diagnosis Method of Smart Meters Based on DBN-CapsNet


Abstract
:1. Introduction
2. Basic Theory
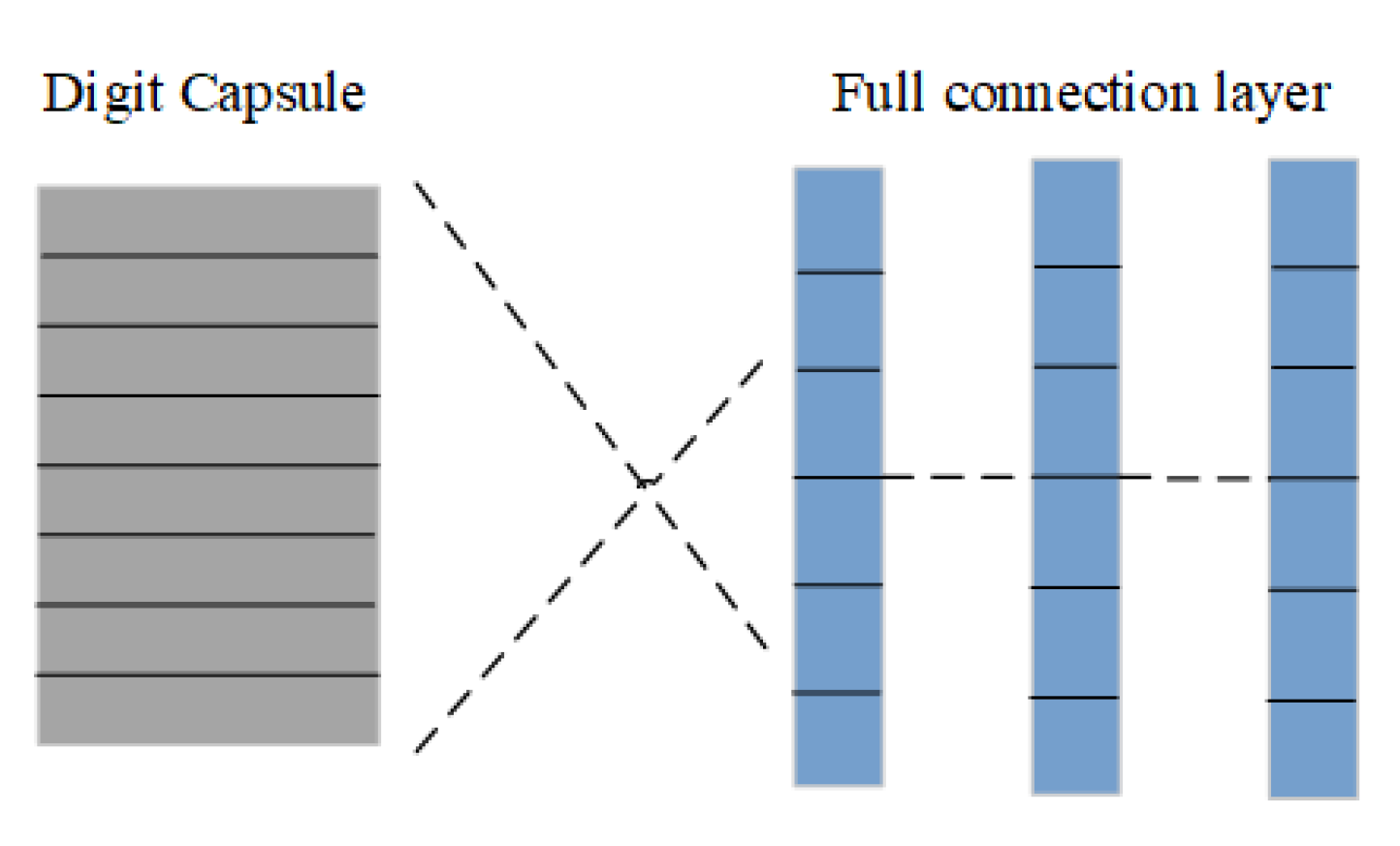
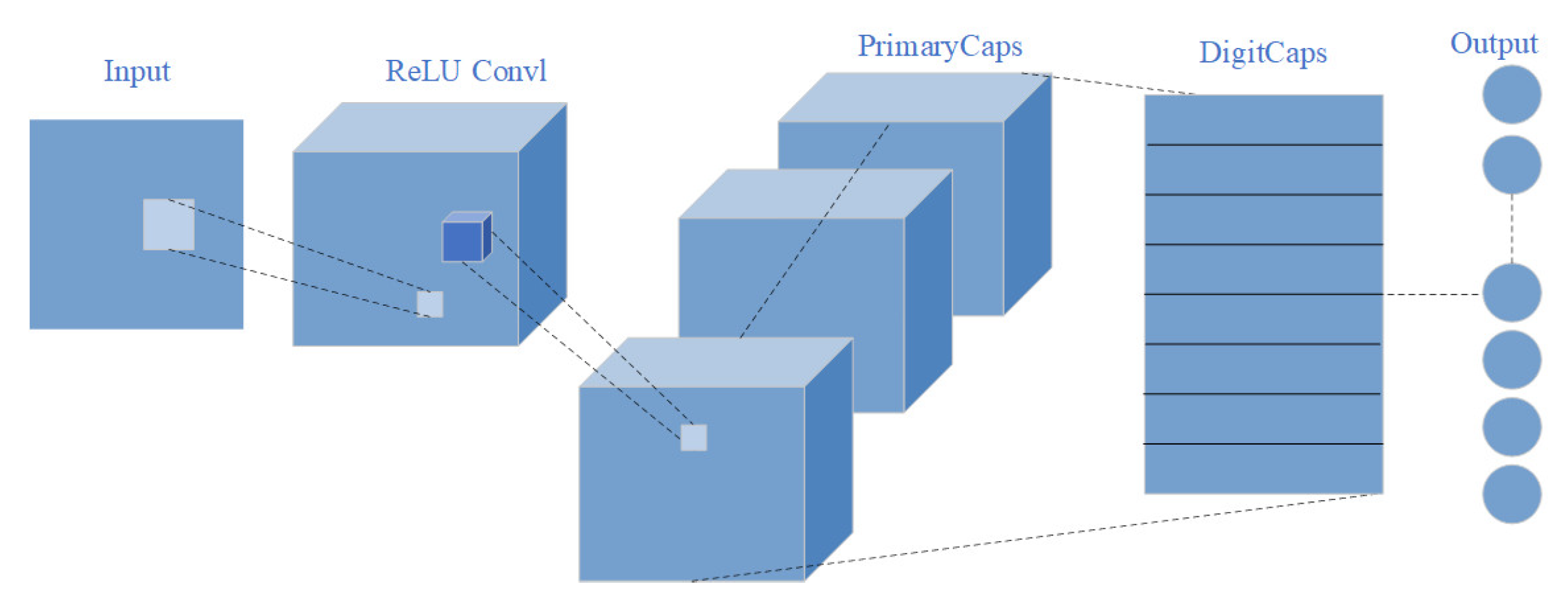
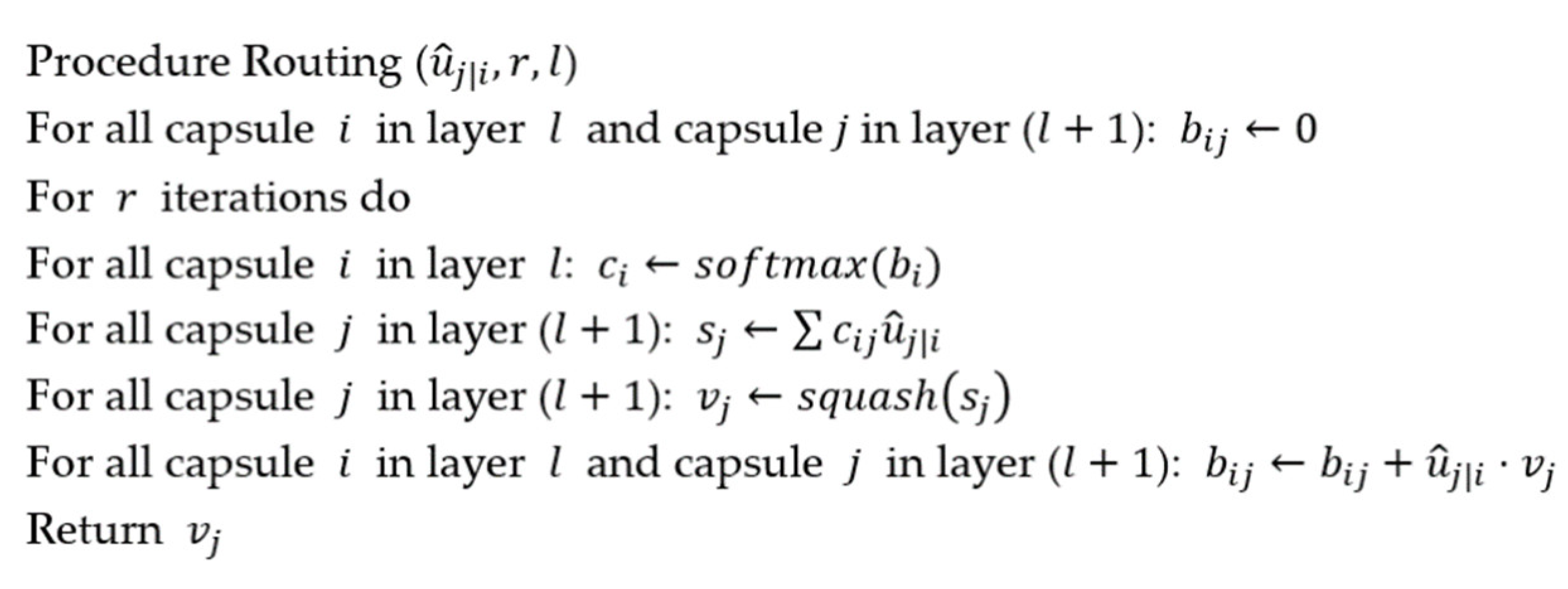
2.1. Capsule Network
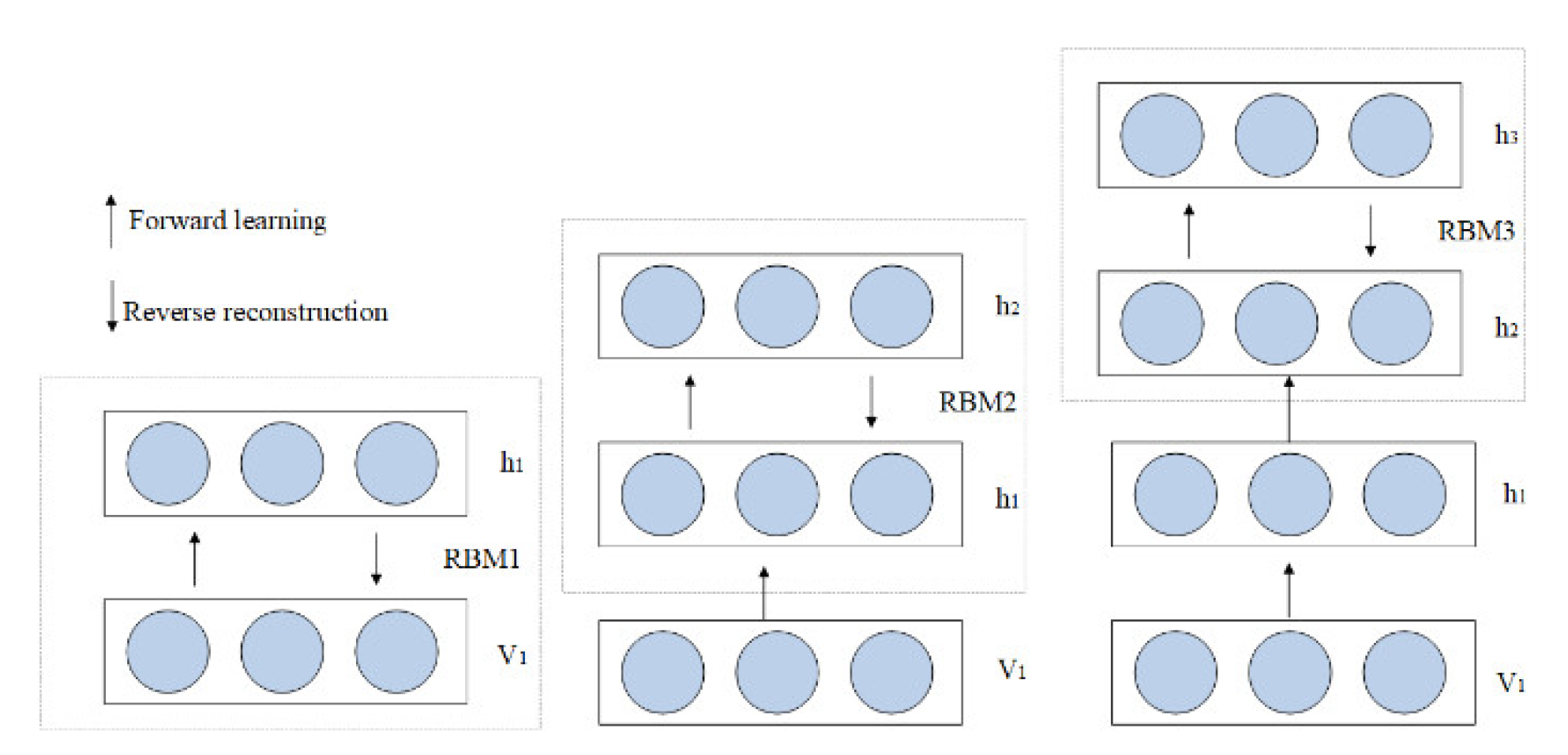
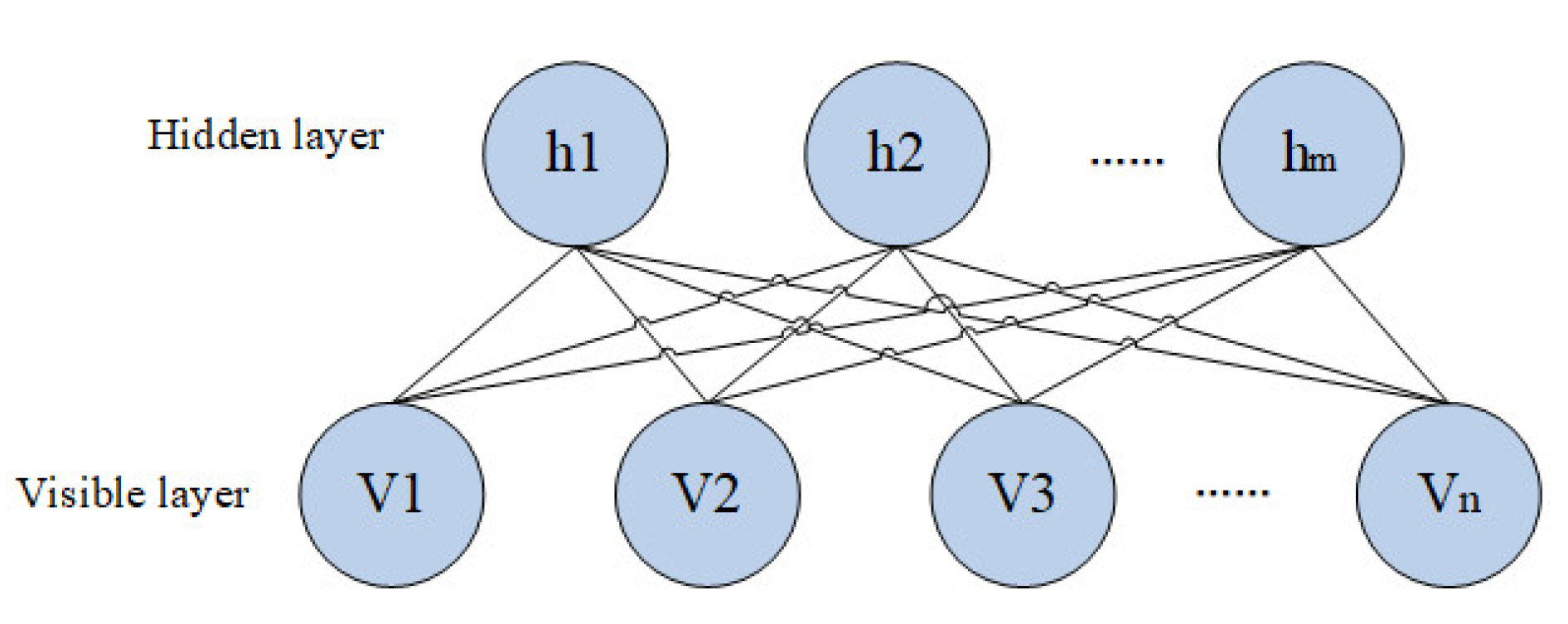
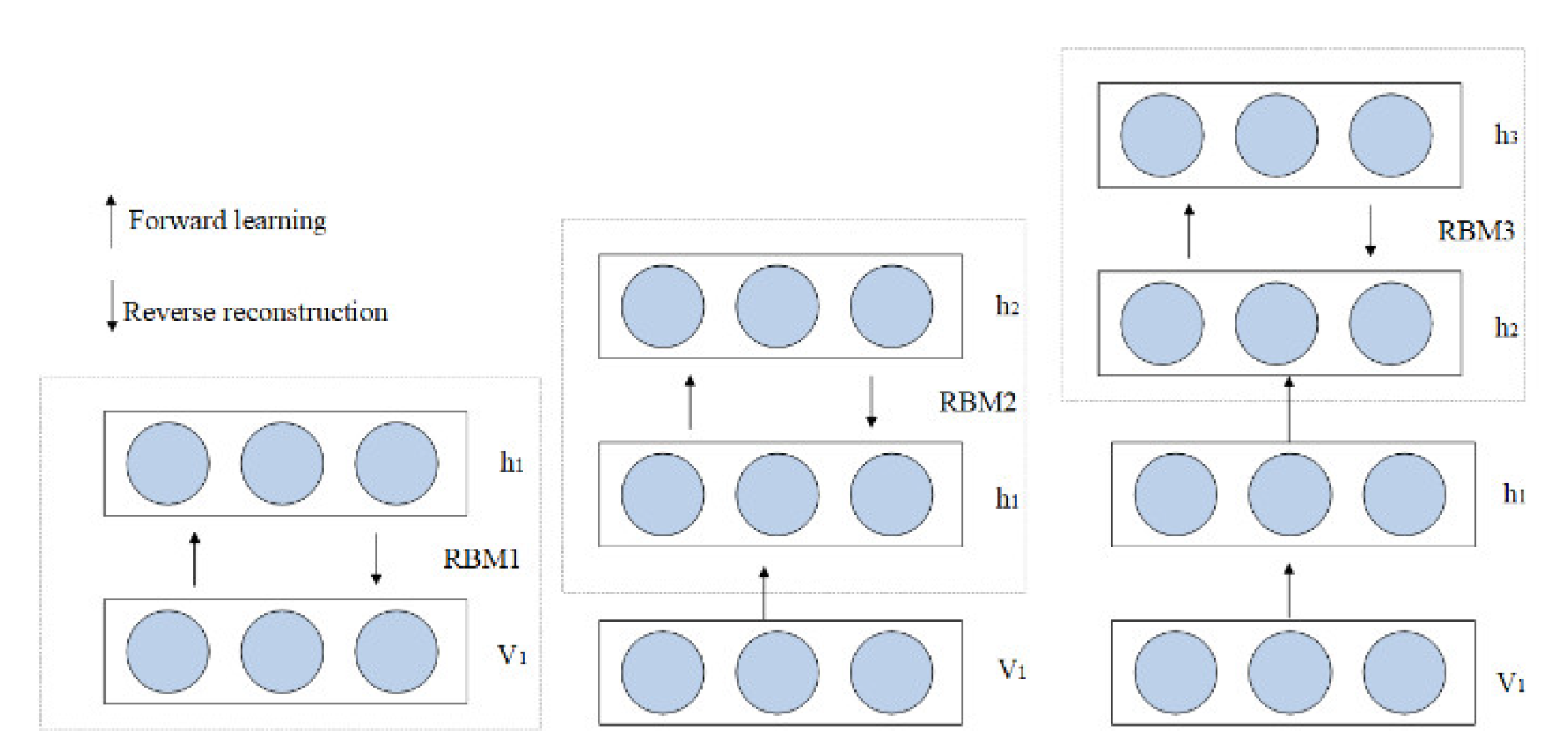
2.2. Deep Belief Network
3. DBN-CapsNet Fault Diagnosis Method
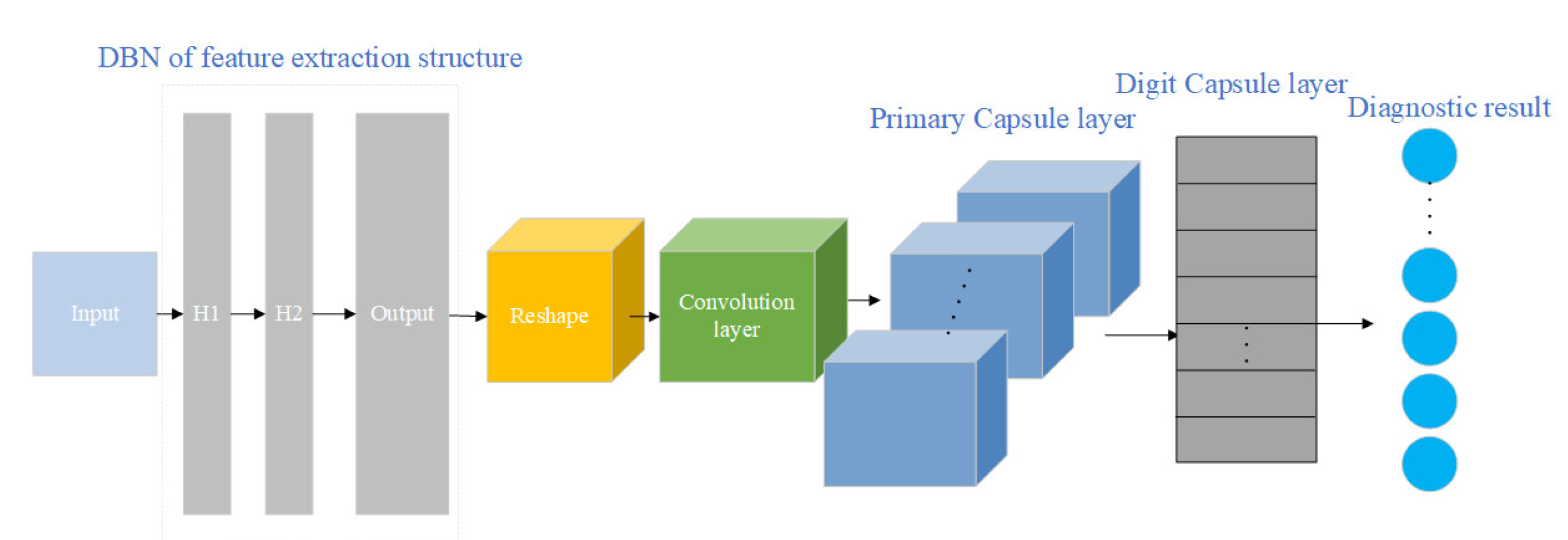
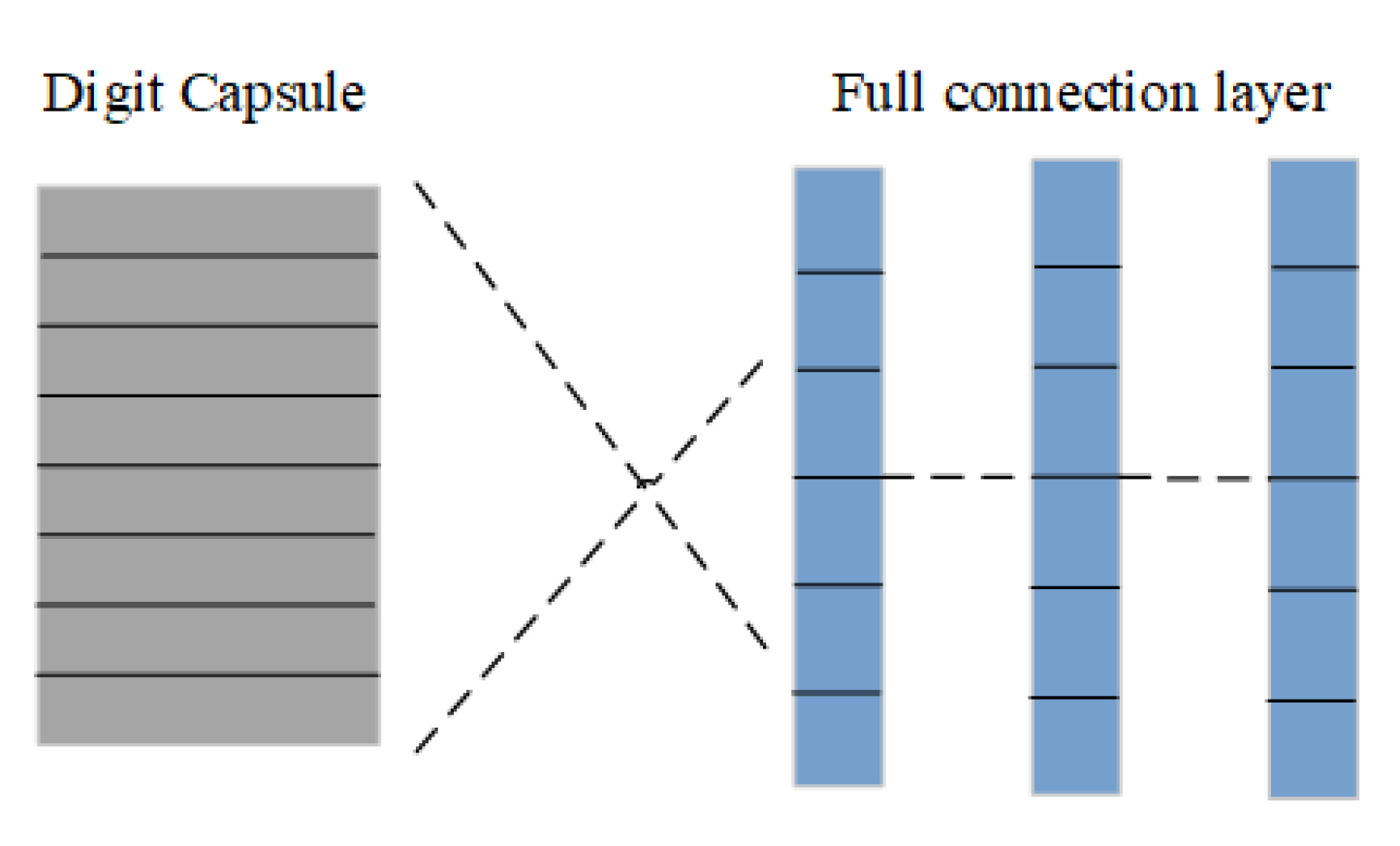
3.1. Structure of DBN-CapsNet
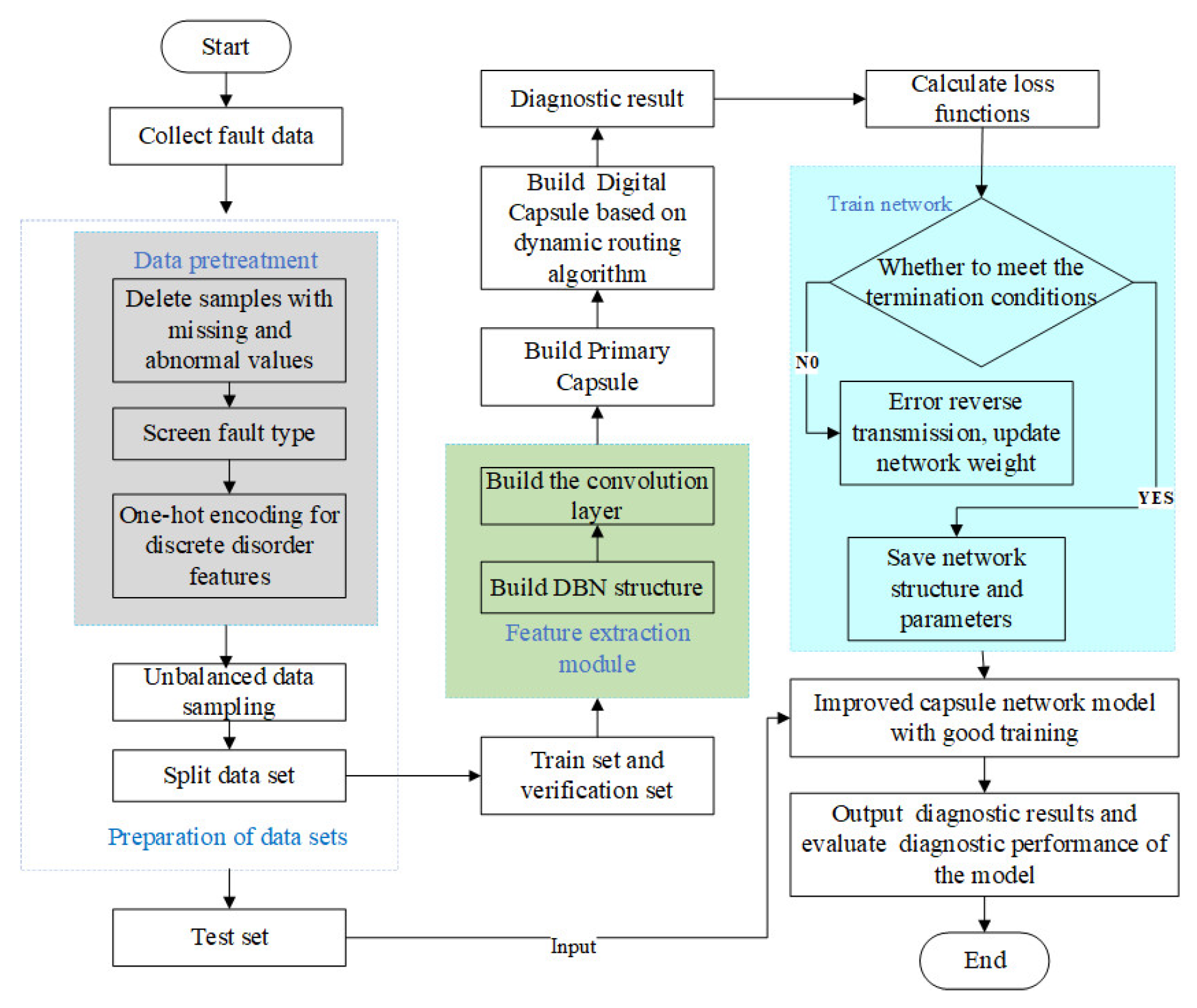
3.2. Fault Diagnosis Process
4. Example Verification
4.1. Fault Dataset Preparation of Smart Meter
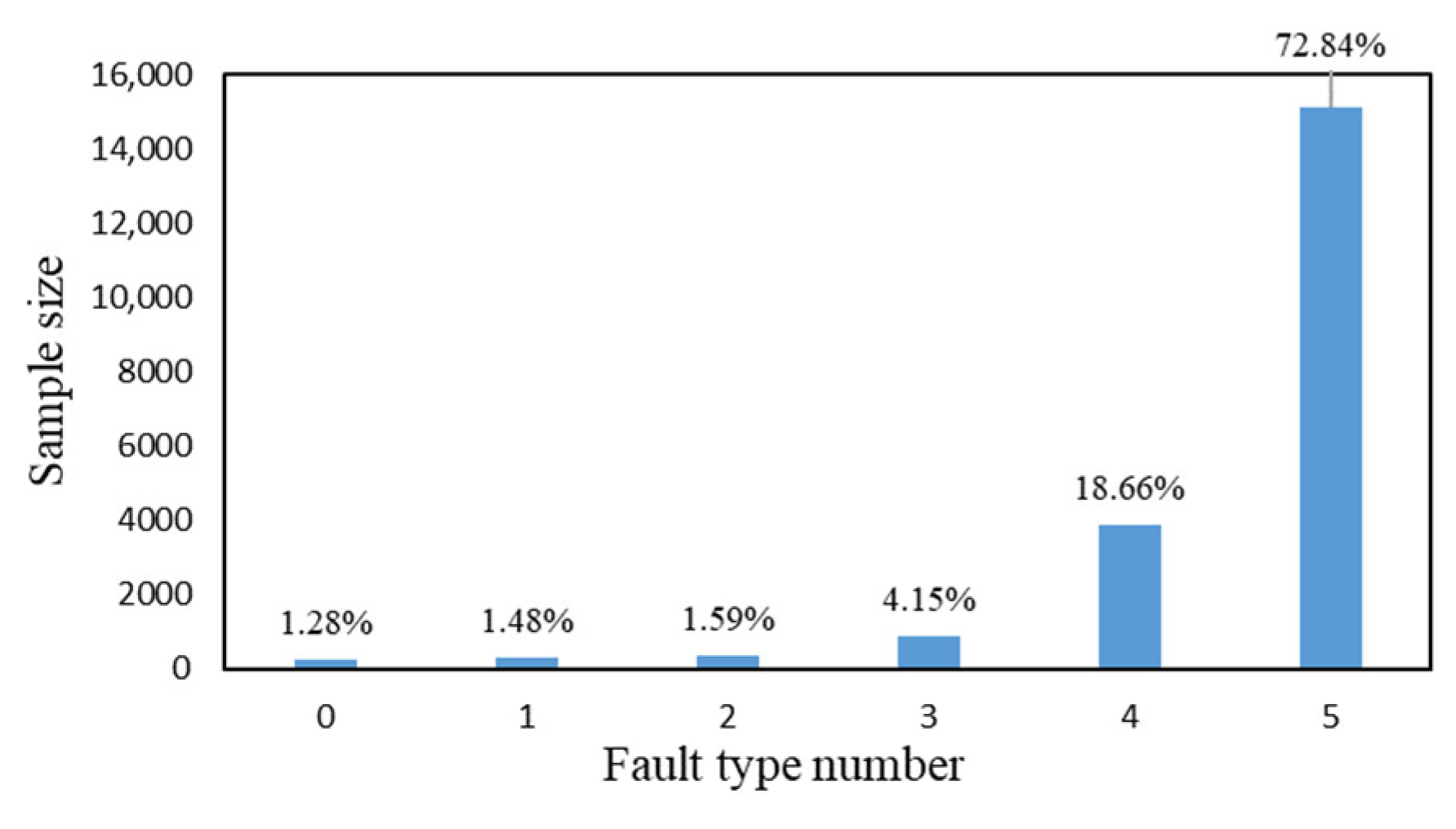
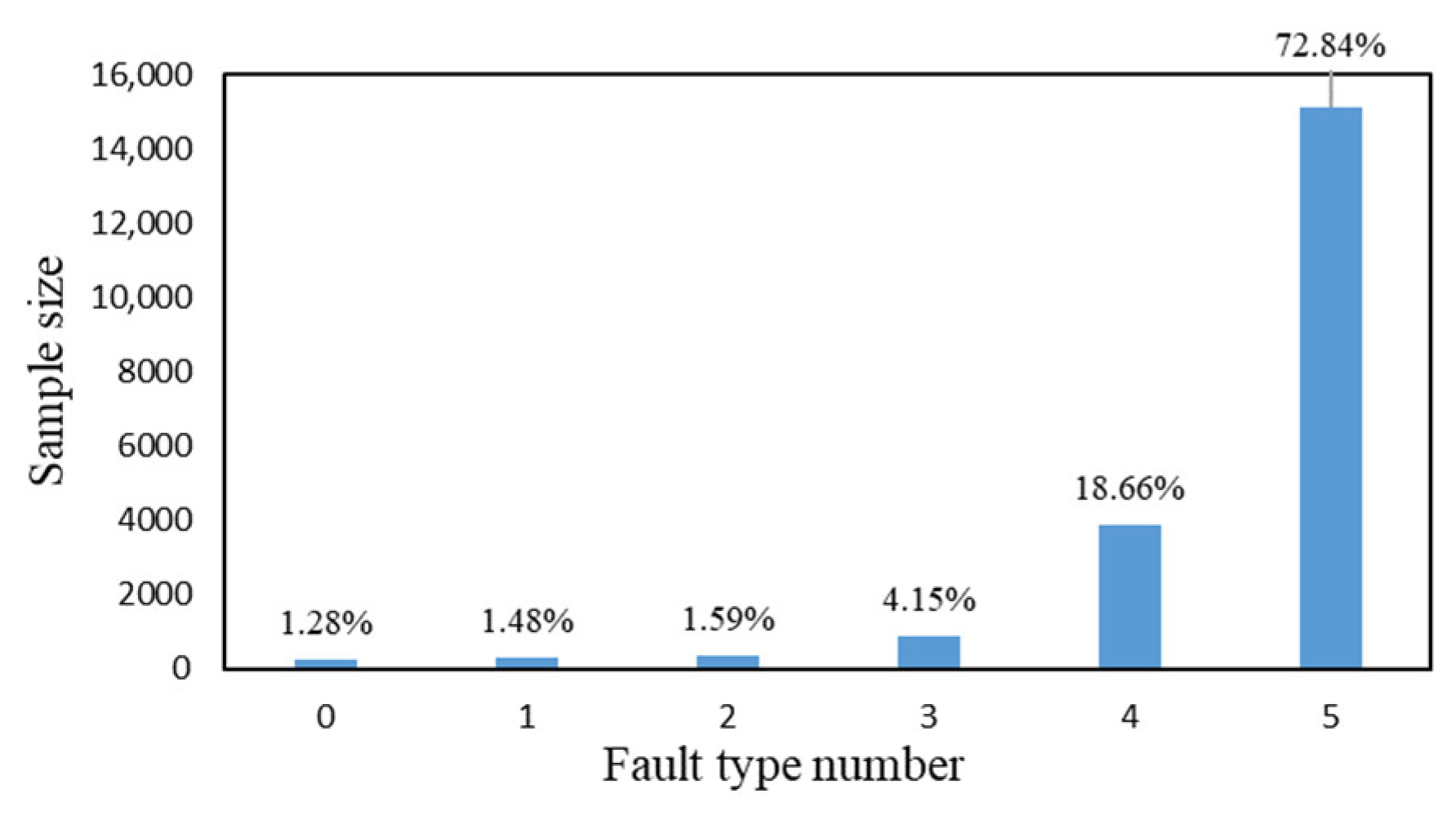
4.1.1. Introduction of Dataset
4.1.2. Data Pretreatment
4.2. Performance Verification of DBN-CapsNet Fault Diagnosis
4.2.1. DBN-CapsNet Network Structure and Parameter Settings
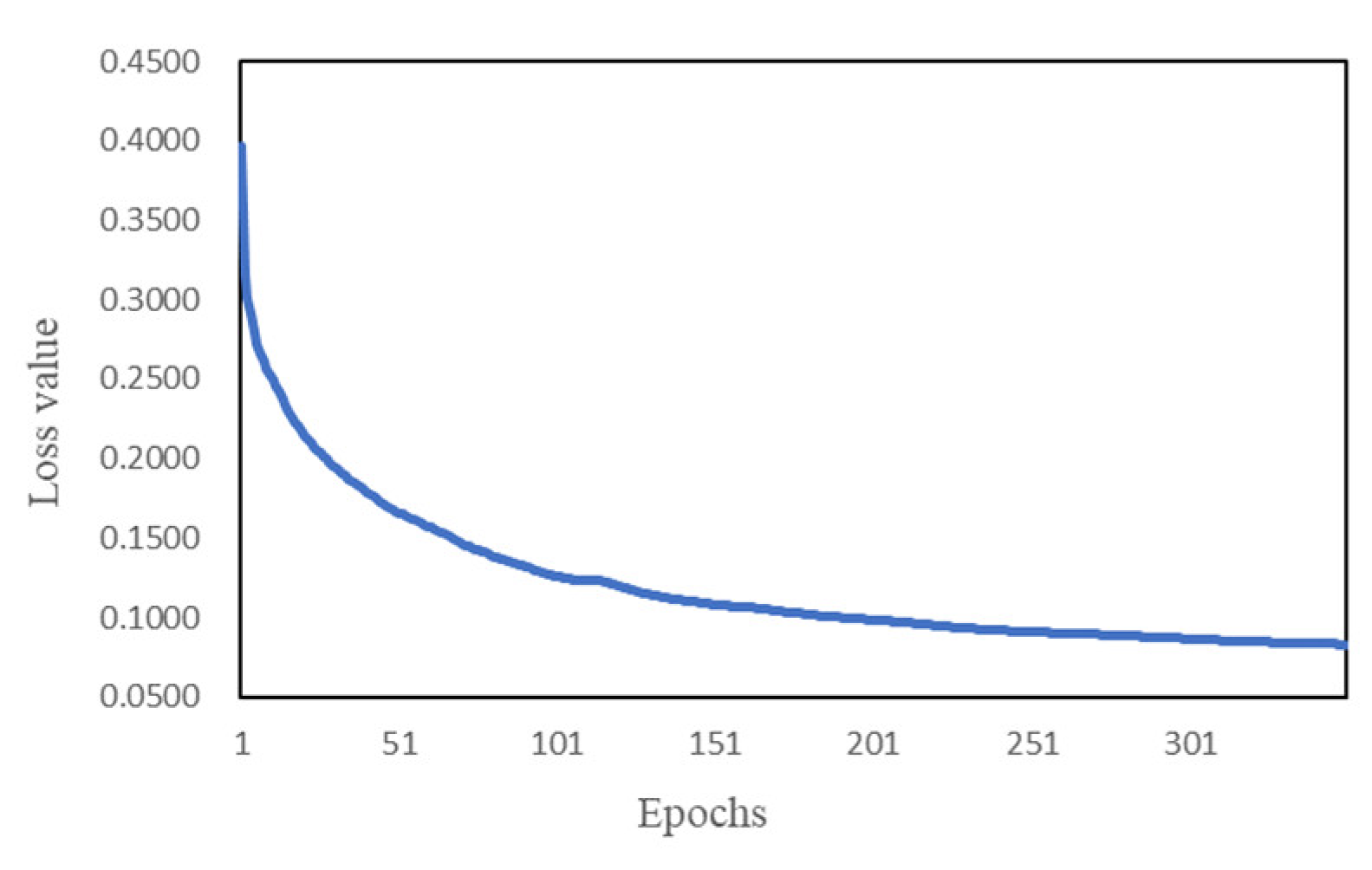
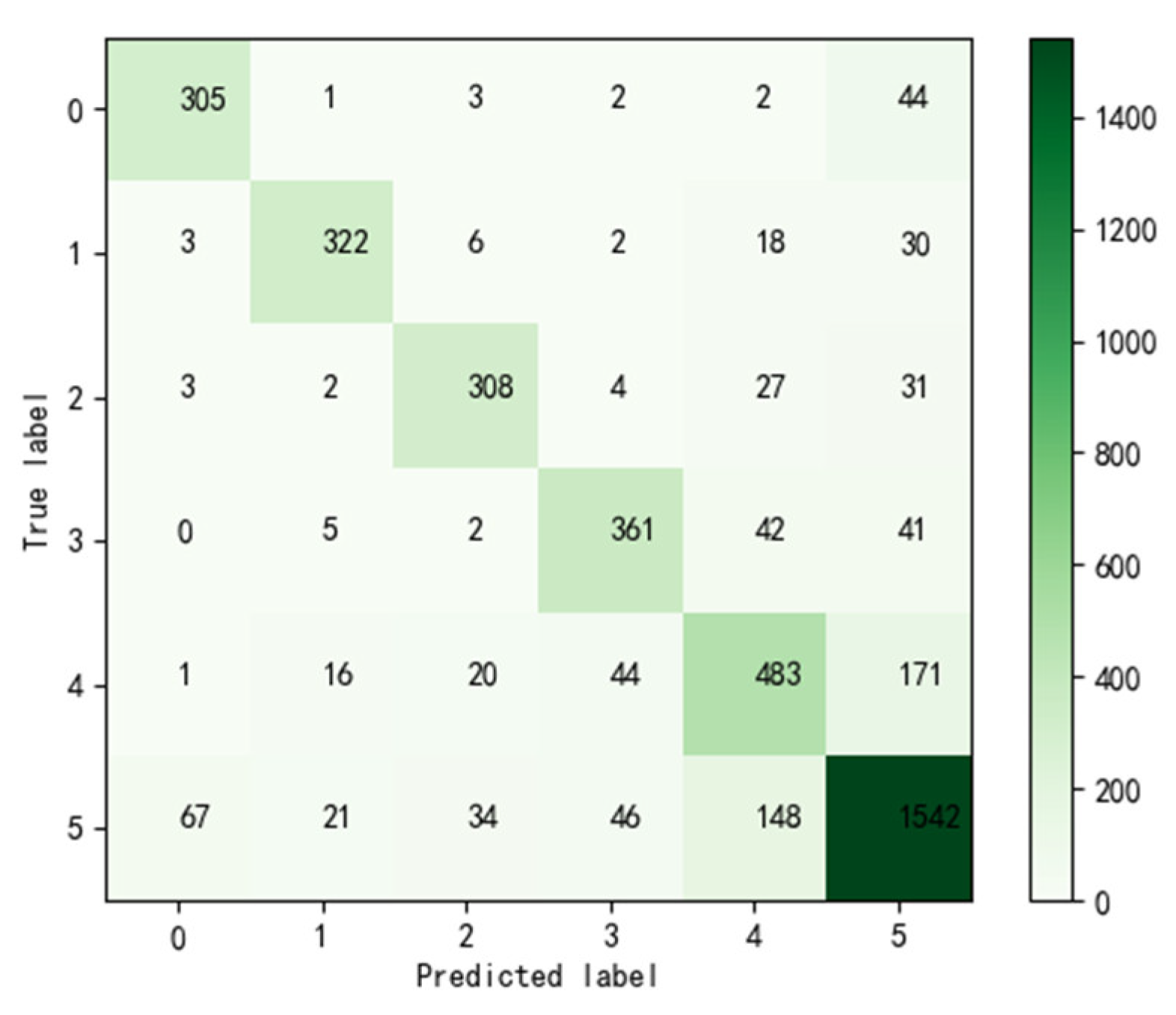
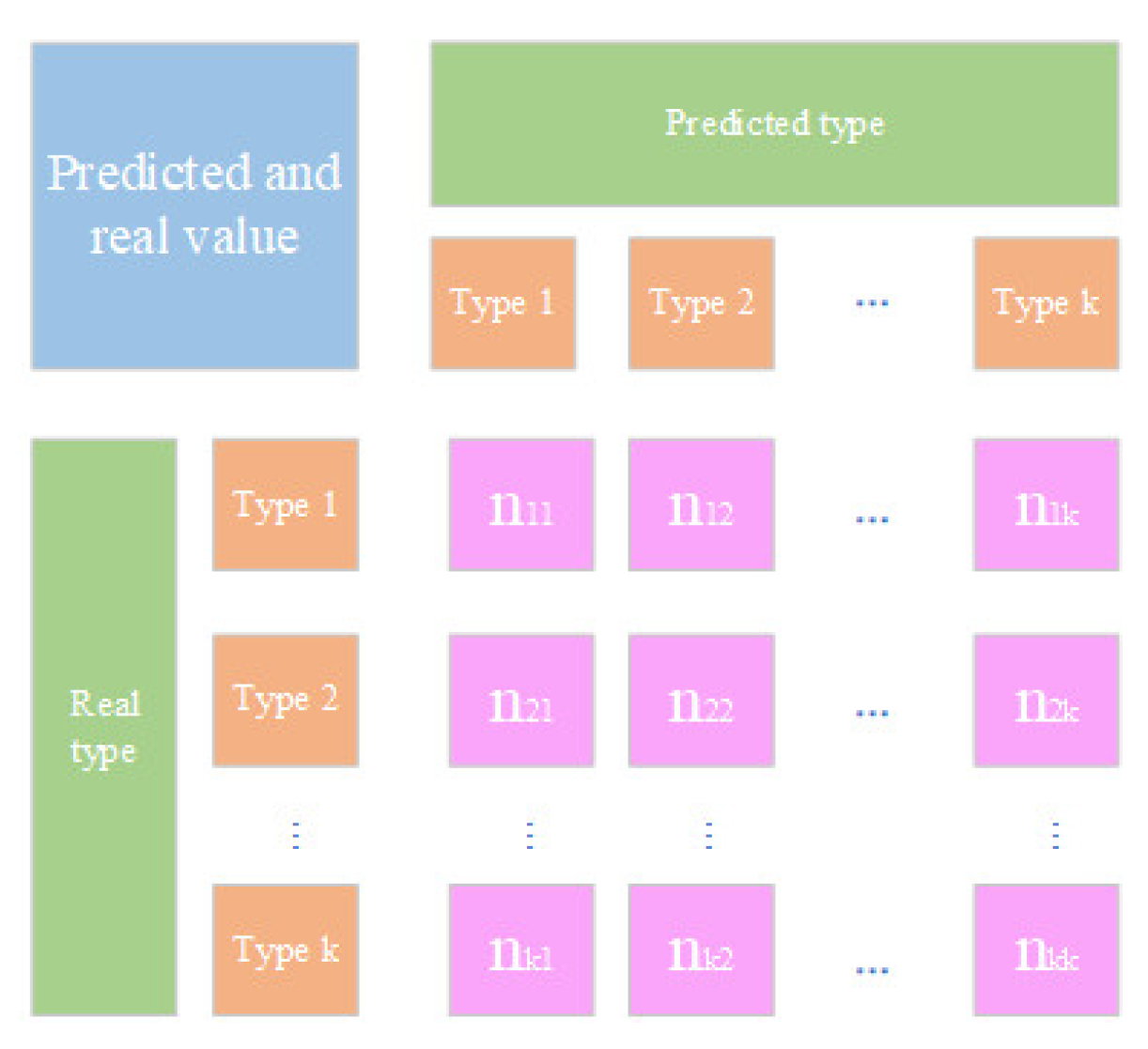
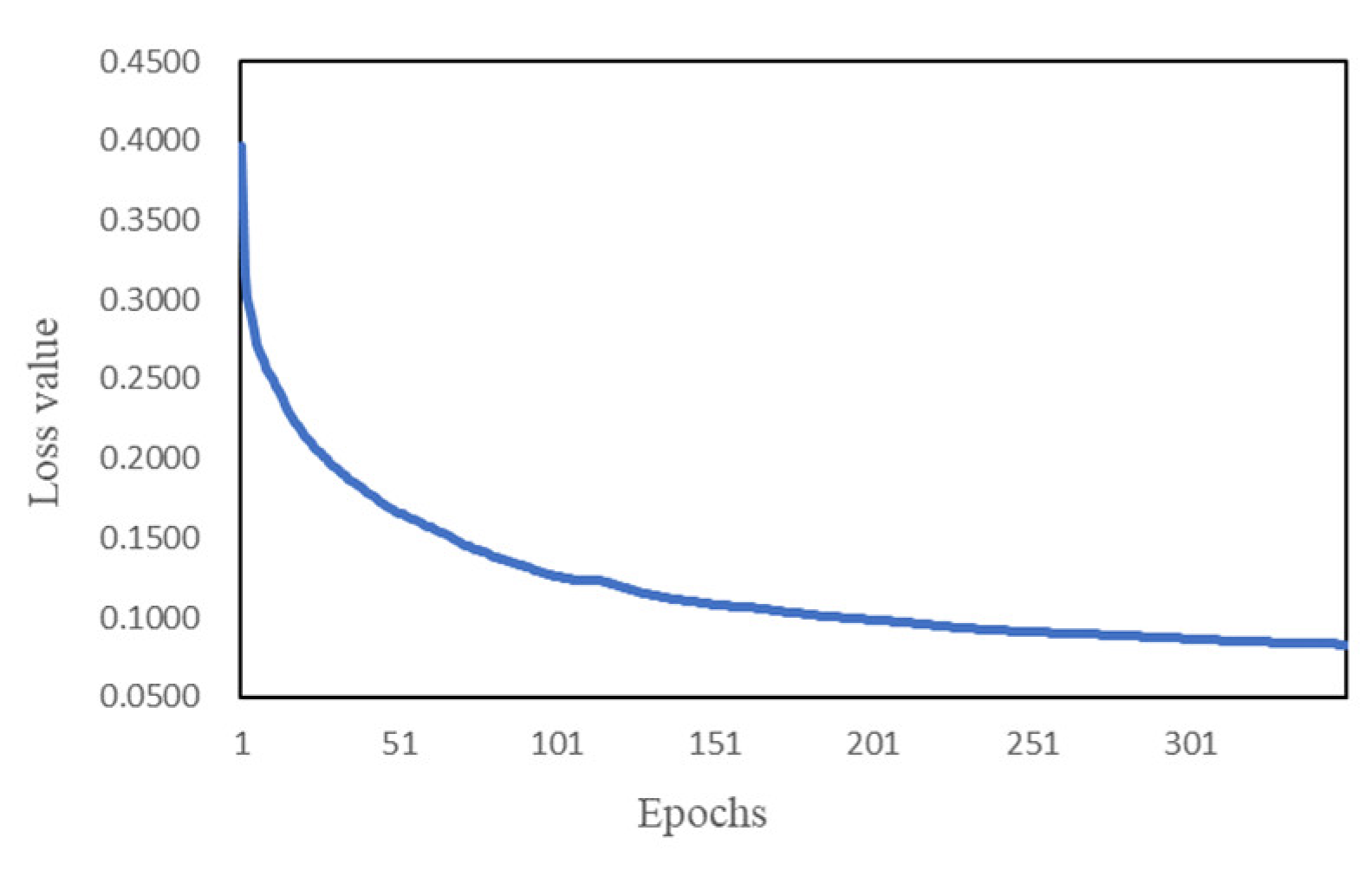
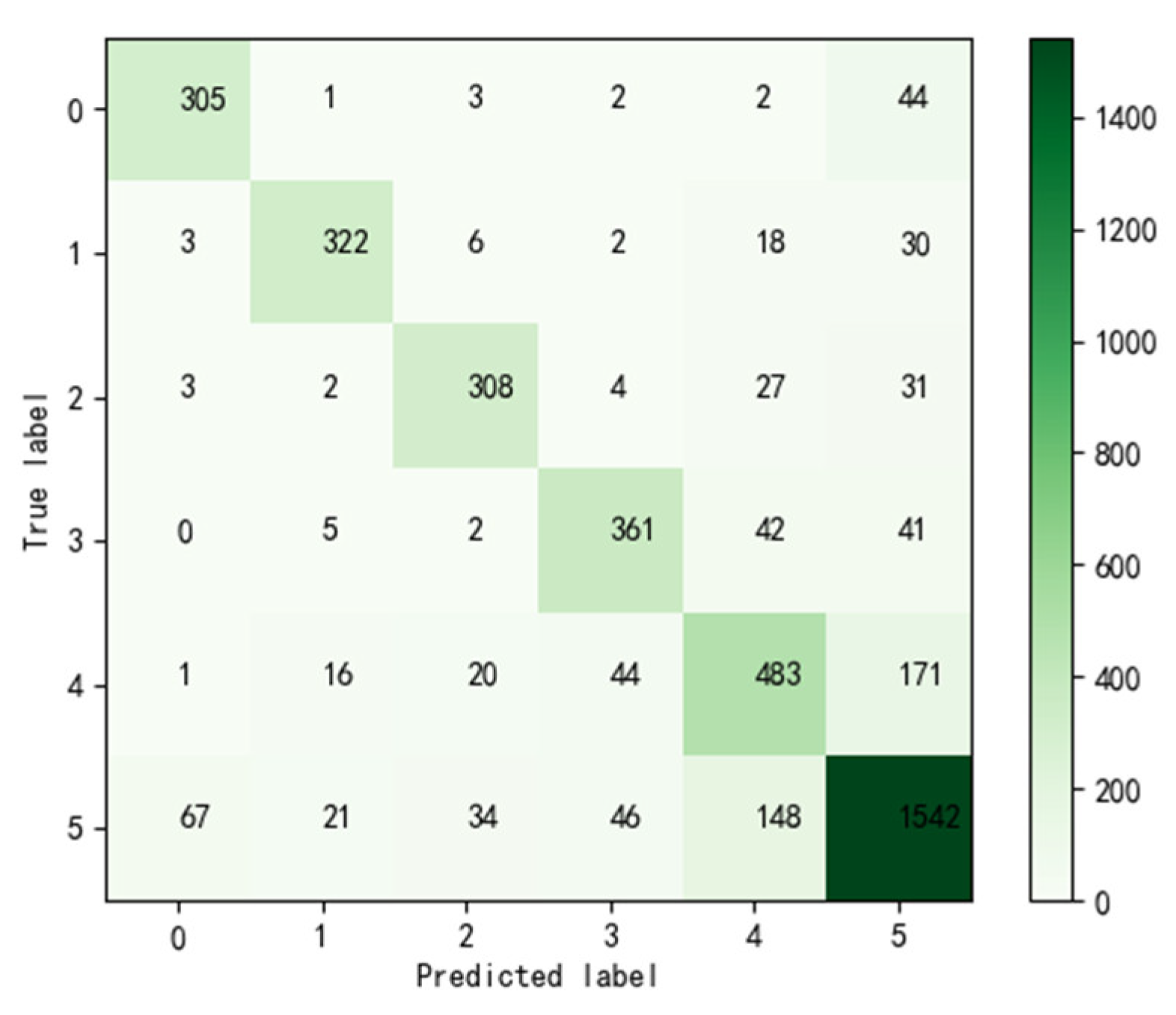
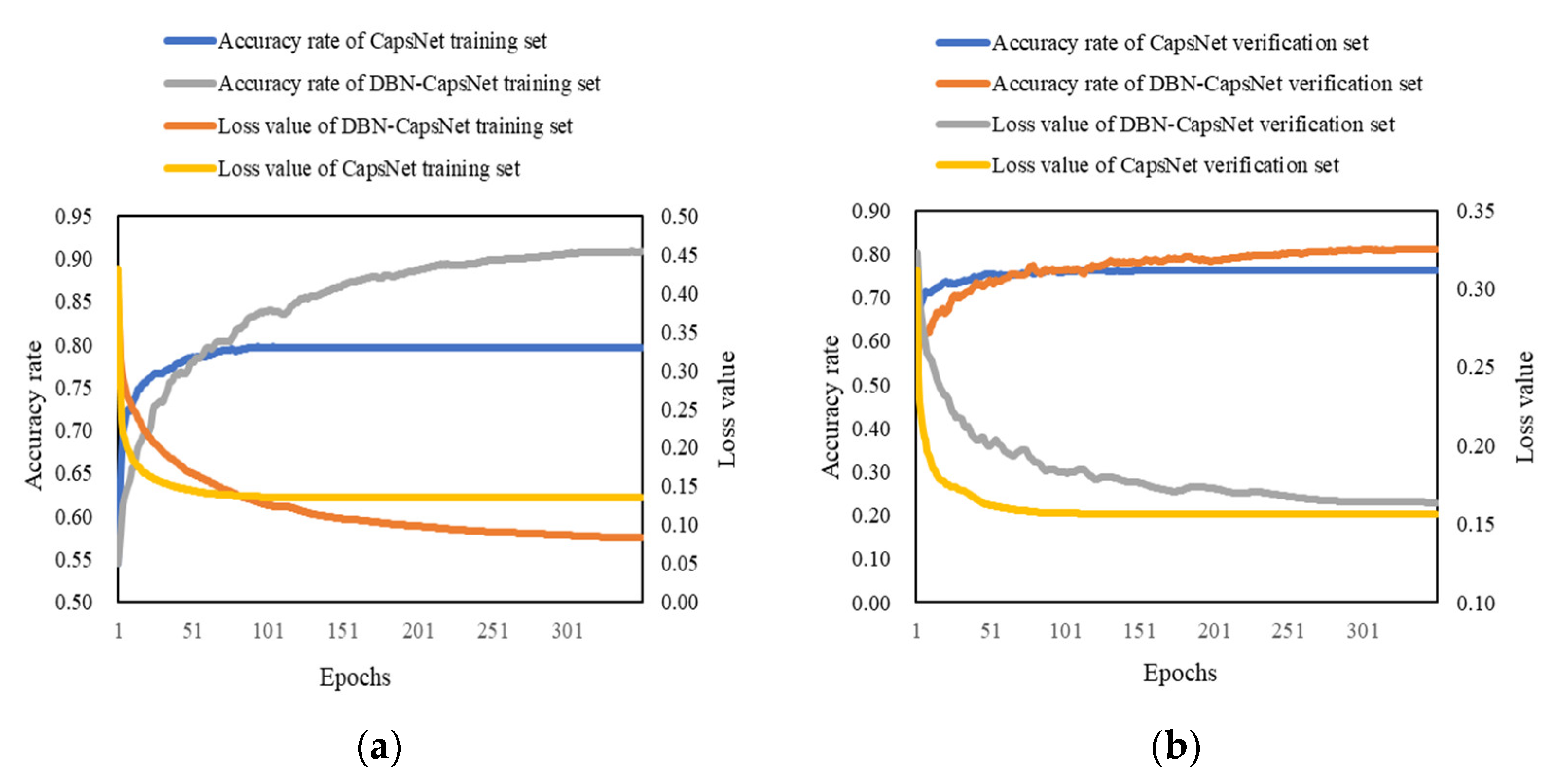
4.2.2. Model Training and Diagnosis Result Analysis
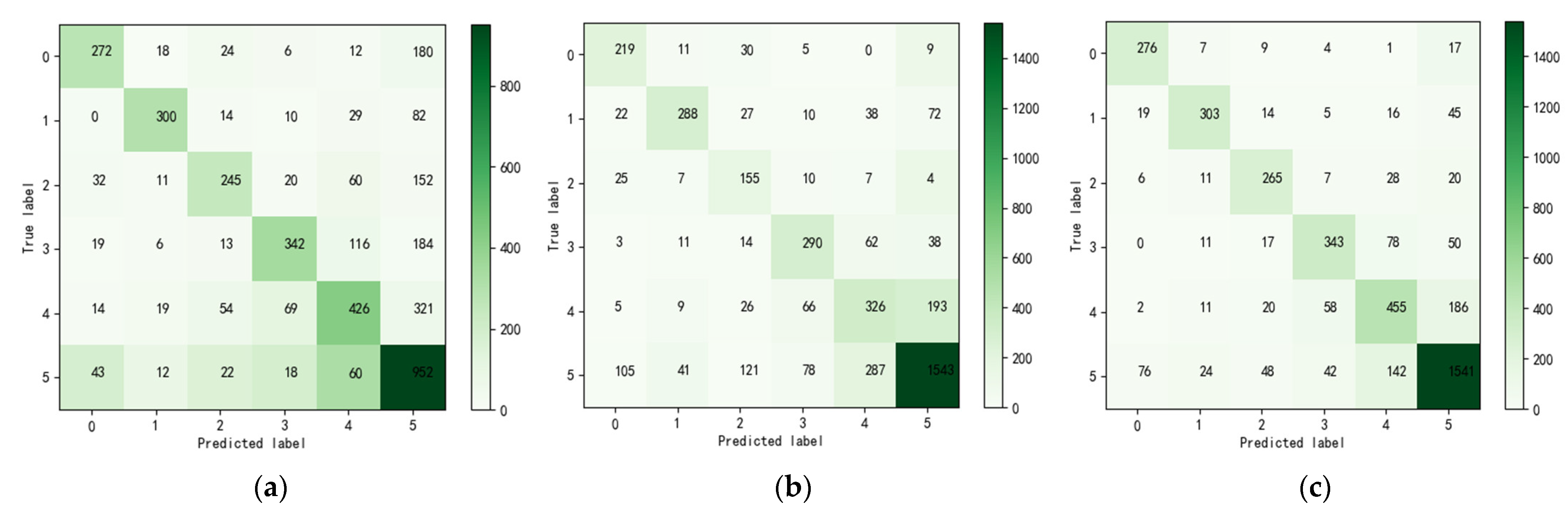
4.2.3. Comparative Analysis of Algorithms
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiong, D.Z.; Jiang, T.H.; Chen, X.Q.; Chen, Y.L. Development of intelligent checking device for power information collection fault. Electr. Meas. Instrum. 2019, 56, 120–123. [Google Scholar] [CrossRef]
- Zhou, F.; Cheng, Y.Y.; Du, J.; Feng, L.; Xiao, J.; Zhang, J.M. Construction of Multidimensional Electric Energy Meter Ab-normal Diagnosis Model Based on Decision Tree Group. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 24–26 May 2019. [Google Scholar]
- Li, N.; Fei, S.J.; Liu, G.L.; Yang, L. Fault Traceability of Metering Device Based on Deep Belief Network. Smart Power 2020, 48, 118–124. [Google Scholar]
- Gao, X.; Diao, X.P.; Liu, J.; Zhang, M.; Yang, H. A Multi-classification Method of Smart Meter Fault Type Based on Model Adaptive Selection Fusion. Power Syst. Technol. 2019, 43, 1955–1961. [Google Scholar] [CrossRef]
- Xue, Z.; Sun, Y.; Dong, Z.C.; Fang, Y.J. Fault diagnosis method of power consumption information acquisition system based on fuzzy Petri nets. Electr. Meas. Instrum. 2019, 56, 64–69. [Google Scholar] [CrossRef]
- Guo, X.C.; Liu, B.B.; Wang, L.L. Fault Diagnosis of Mining Power Cable Based on Waveletpacket and Cs-Bp Neural Network. Comput. Appl. Softw. 2021, 38, 105–110. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Lin, Y.; Li, X. A novel method for intelligent fault diagnosis of rolling bearings using ensemble deep auto-encoders. Mech. Syst. Signal Process. 2018, 102, 278–297. [Google Scholar] [CrossRef]
- Orrù, P.; Zoccheddu, A.; Sassu, L.; Mattia, C.; Cozza, R.; Arena, S. Machine Learning Approach Using MLP and SVM Algorithms for the Fault Prediction of a Centrifugal Pump in the Oil and Gas Industry. Sustainability 2020, 12, 4776. [Google Scholar] [CrossRef]
- Wu, N.; Wang, Z. Bearing Fault Diagnosis Based on the Combination of One-Dimensional CNN and Bi-LSTM. Modul. Mach. Tool Autom. Manuf. Tech. 2021, 571, 38–41. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D convolutional neural networks and applications: A survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
- Sabour, S.; Frosst, N.; Hinton, G.E. Dynamic routing between Capsules. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Curran Associates Inc.: Red Hook, NY, USA, 2017; pp. 3859–3869. [Google Scholar]
- Yang, D.C.; Liao, W.L.; Ren, X.; Wang, Y.S. Fault Diagnosis of Transformer Based on Capsule Network. High Volt. Eng. 2021, 47, 415–425. [Google Scholar] [CrossRef]
- Vesperini, F.; Gabrielli, L.; Principi, E.; Squartini, S. Polyphonic Sound Event Detection by Using Capsule Neural Networks. IEEE J. Sel. Top. Signal Process. 2019, 13, 310–322. [Google Scholar] [CrossRef] [Green Version]
- Paoletti, M.E.; Haut, J.M.; Fernandez-Beltran, R.; Plaza, J.; Plaza, A.; Li, J.; Pla, F. Capsule networks for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2019, 7, 2145–2160. [Google Scholar] [CrossRef]
- Rosario, V.M.D.; Borin, E.; Breternitz, M. The Multi-Lane Capsule Network. IEEE Signal Process. Lett. 2019, 26, 1006–1010. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Qin, N.; Dai, X.; Huang, D. Fault Diagnosis of High-Speed Train Bogie Based on Capsule Network. IEEE Trans. Instrum. Meas. 2020, 69, 6203–6211. [Google Scholar] [CrossRef]
- Huang, R.; Li, J.; Wang, S.; Li, G.; Li, W. A Robust Weight-Shared Capsule Network for Intelligent Machinery Fault Diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 6466–6475. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, L.; Du, W.; Cai, W.; Zhou, J.; Wang, J.; Han, X.; He, G. A Novel Method for Intelligent Fault Diagnosis of Bearing Based on Capsule Neural Network. Complexity 2019, 2019, 6943234. [Google Scholar] [CrossRef] [Green Version]
- Huang, R.; Li, J.; Li, W.; Cui, L. Deep Ensemble Capsule Network for Intelligent Compound Fault Diagnosis Using Multisensory Data. IEEE Trans. Instrum. Meas. 2020, 69, 2304–2314. [Google Scholar] [CrossRef]
- Yang, P.; Su, Y.C.; Zhang, Z.A. study on rolling bearing fault diagnosis based on convolution capsule network. J. Vib. Shock. 2020, 39, 55–62, 68. [Google Scholar] [CrossRef]
- Sun, Y.; Peng, G.L. Improved capsule network method for rolling bearing fault diagnosis. J. Harbin Inst. Technol. 2021, 53, 23–28. [Google Scholar] [CrossRef]
- Wang, Y.; Ning, D.; Feng, S. A Novel Capsule Network Based on Wide Convolution and Multi-Scale Convolution for Fault Diagnosis. Appl. Sci. 2020, 10, 3659. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Tran, S.N.; Garcez, A. Deep Logic Networks: Inserting and Extracting Knowledge from Deep Belief Networks. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 246–258. [Google Scholar] [CrossRef]
- Gu, B.; Sung, Y. Enhanced Reinforcement Learning Method Combining One-Hot Encoding-Based Vectors for CNN-Based Alternative High-Level Decisions. Appl. Sci. 2021, 11, 1291. [Google Scholar] [CrossRef]
- Douzas, G.; Bacao, F.; Last, F. Improving imbalanced learning through a heuristic oversampling method based on k-means and SMOTE. Inf. Sci. 2018, 465, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Chawla, N.V.; Bowyer, K.W.; Hall, L.O.; Kegelmeyer, W.P. SMOTE: Synthetic Minority Over-sampling Technique. J. Artif. Intell. Res. 2002, 16, 321–357. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type Number | Fault Type | Sample Size before Sampling | Sample Size after Sampling | Proportion after Sampling |
|---|---|---|---|---|
| 0 | Overload burn-out meter | 267 | 1865 | 8.97% |
| 1 | Battery failure | 307 | 1885 | 9.07% |
| 2 | Pulse sampling failure | 330 | 1897 | 9.13% |
| 3 | Clock out of order | 863 | 2163 | 10.41% |
| 4 | Communication failure | 3879 | 3671 | 17.66% |
| 5 | Electromechanical failure | 15,142 | 9303 | 44.76% |
| Mean | 3464 | / |
| Layers | Structure and Parameters | Output Size |
|---|---|---|
| 1 | Input layer | |
| 2 | DBN structure: Number of RBM1 hidden neurons: 100 Number of RBM2 hidden neurons: 80 Number of neurons in DBN output layer: 61 | |
| 3 | Reshape layers | |
| 4 | Convolution layer: 56 convolution kernels, the size of convolution kernels is , and the activation function is ReLU. | |
| 5 | Primary capsule: the output channel is 56, the capsule dimension is 8, and the convolution kernel size is . | |
| 6 | Digit capsule: the number of output capsules is 6, the dimension of output capsules is 16, and the activation function is Squash. | |
| 7 | Output layer | 1 × 6 |
| Fault Type Number | Precision Rate | Recall Rate | F Value |
|---|---|---|---|
| 0 | 0.80 | 0.85 | 0.83 |
| 1 | 0.88 | 0.85 | 0.86 |
| 2 | 0.83 | 0.82 | 0.82 |
| 3 | 0.79 | 0.80 | 0.79 |
| 4 | 0.67 | 0.66 | 0.66 |
| 5 | 0.83 | 0.83 | 0.83 |
| Batch Size | Accuracy Rate | Macro F1 | Training Time (s) |
|---|---|---|---|
| 50 | 0.7958 | 0.7950 | 4775 |
| 100 | 0.7967 | 0.7950 | 3886 |
| 200 | 0.7989 | 0.7983 | 3779 |
| 300 | 0.7811 | 0.7783 | 3603 |
| 400 | 0.7746 | 0.7700 | 3522 |
| 500 | 0.7768 | 0.7700 | 3449 |
| Optimizer | Accuracy Rate | Macro F1 |
|---|---|---|
| SGD | 0.4472 | 0.1033 |
| RMSprop | 0.7912 | 0.7917 |
| Adagrad | 0.6250 | 0.5233 |
| Adadelta | 0.4472 | 0.1033 |
| Adamax | 0.7667 | 0.7533 |
| Adam | 0.7989 | 0.7983 |
| Fault Type Number | CapsNet | CNN | SVM | ||||||
|---|---|---|---|---|---|---|---|---|---|
| P | R | F Value | P | R | F Value | P | R | F Value | |
| 0 | 0.73 | 0.88 | 0.80 | 0.58 | 0.80 | 0.67 | 0.72 | 0.53 | 0.61 |
| 1 | 0.83 | 0.75 | 0.79 | 0.78 | 0.63 | 0.70 | 0.82 | 0.69 | 0.75 |
| 2 | 0.71 | 0.79 | 0.75 | 0.42 | 0.75 | 0.53 | 0.66 | 0.47 | 0.55 |
| 3 | 0.75 | 0.69 | 0.72 | 0.63 | 0.69 | 0.66 | 0.74 | 0.50 | 0.60 |
| 4 | 0.63 | 0.62 | 0.63 | 0.45 | 0.52 | 0.48 | 0.61 | 0.47 | 0.53 |
| 5 | 0.82 | 0.82 | 0.83 | 0.83 | 0.71 | 0.76 | 0.51 | 0.86 | 0.64 |
| Algorithm | Accuracy Rate | Macro F1 | Training Time (s) |
|---|---|---|---|
| SVM | 0.61 | 0.61 | 210 |
| CNN | 0.68 | 0.63 | 939 |
| CapsNet | 0.77 | 0.75 | 12,134 |
| DBN-CapsNet | 0.80 | 0.80 | 3779 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Wu, Z.; Wang, Q.; Yu, Z. Fault Diagnosis Method of Smart Meters Based on DBN-CapsNet. Electronics 2022, 11, 1603. https://doi.org/10.3390/electronics11101603
Zhou J, Wu Z, Wang Q, Yu Z. Fault Diagnosis Method of Smart Meters Based on DBN-CapsNet. Electronics. 2022; 11(10):1603. https://doi.org/10.3390/electronics11101603
Chicago/Turabian StyleZhou, Juan, Zonghuan Wu, Qiang Wang, and Zhonghua Yu. 2022. "Fault Diagnosis Method of Smart Meters Based on DBN-CapsNet" Electronics 11, no. 10: 1603. https://doi.org/10.3390/electronics11101603
APA StyleZhou, J., Wu, Z., Wang, Q., & Yu, Z. (2022). Fault Diagnosis Method of Smart Meters Based on DBN-CapsNet. Electronics, 11(10), 1603. https://doi.org/10.3390/electronics11101603