
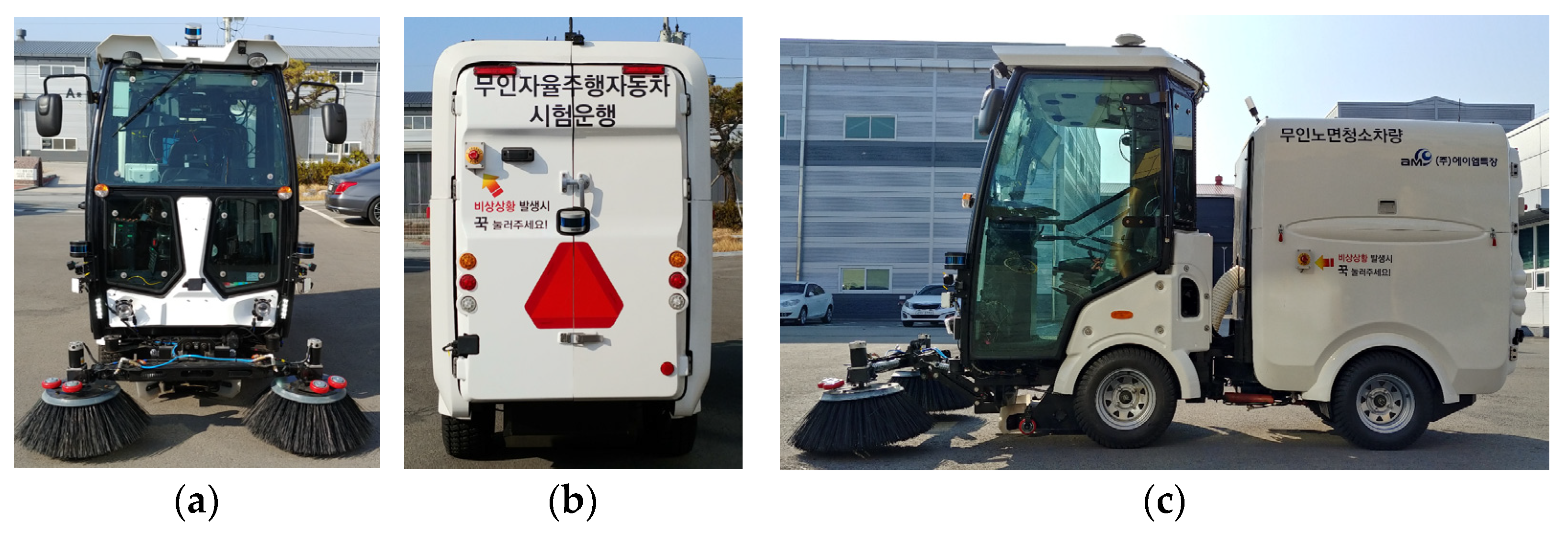
Rollover Prevention Control for Autonomous Electric Road Sweeper



Abstract
:1. Introduction
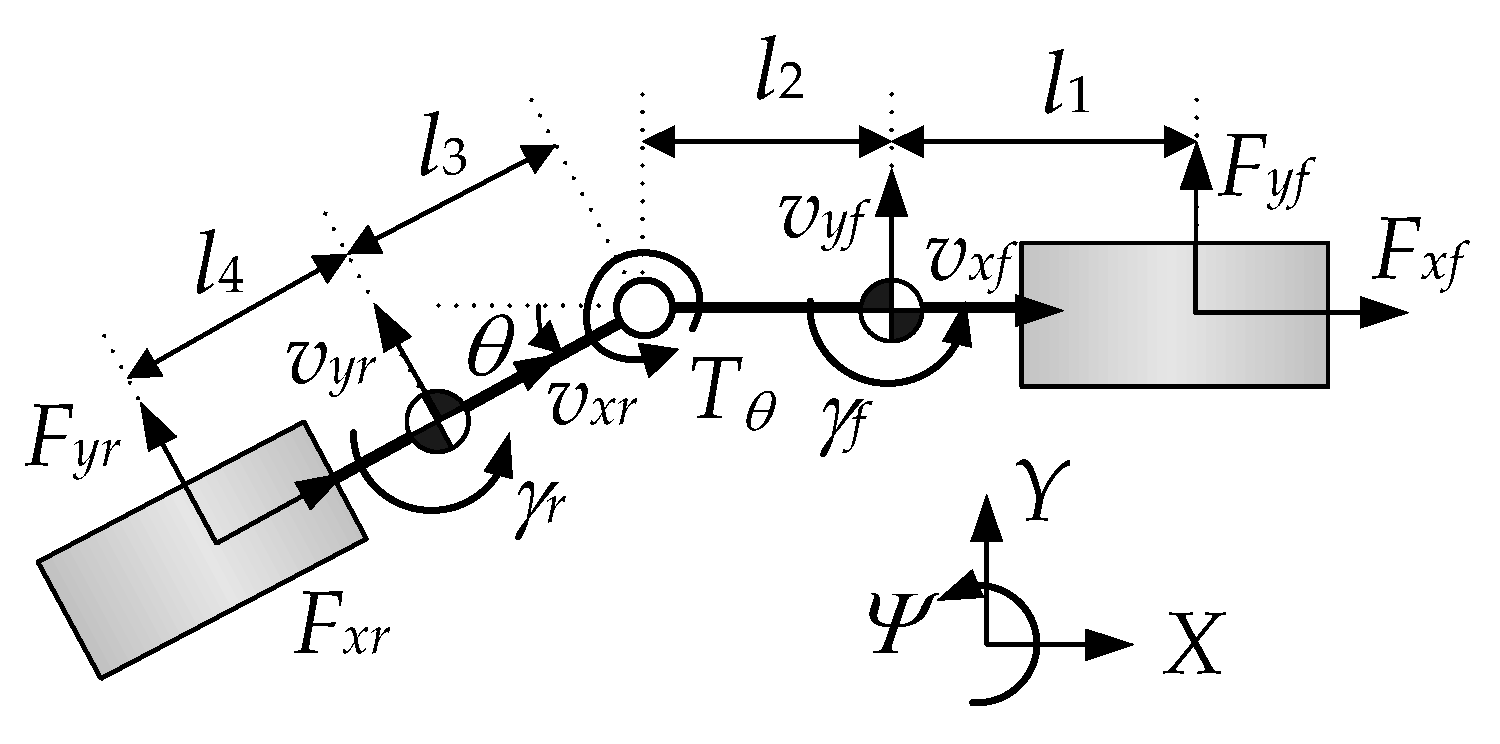
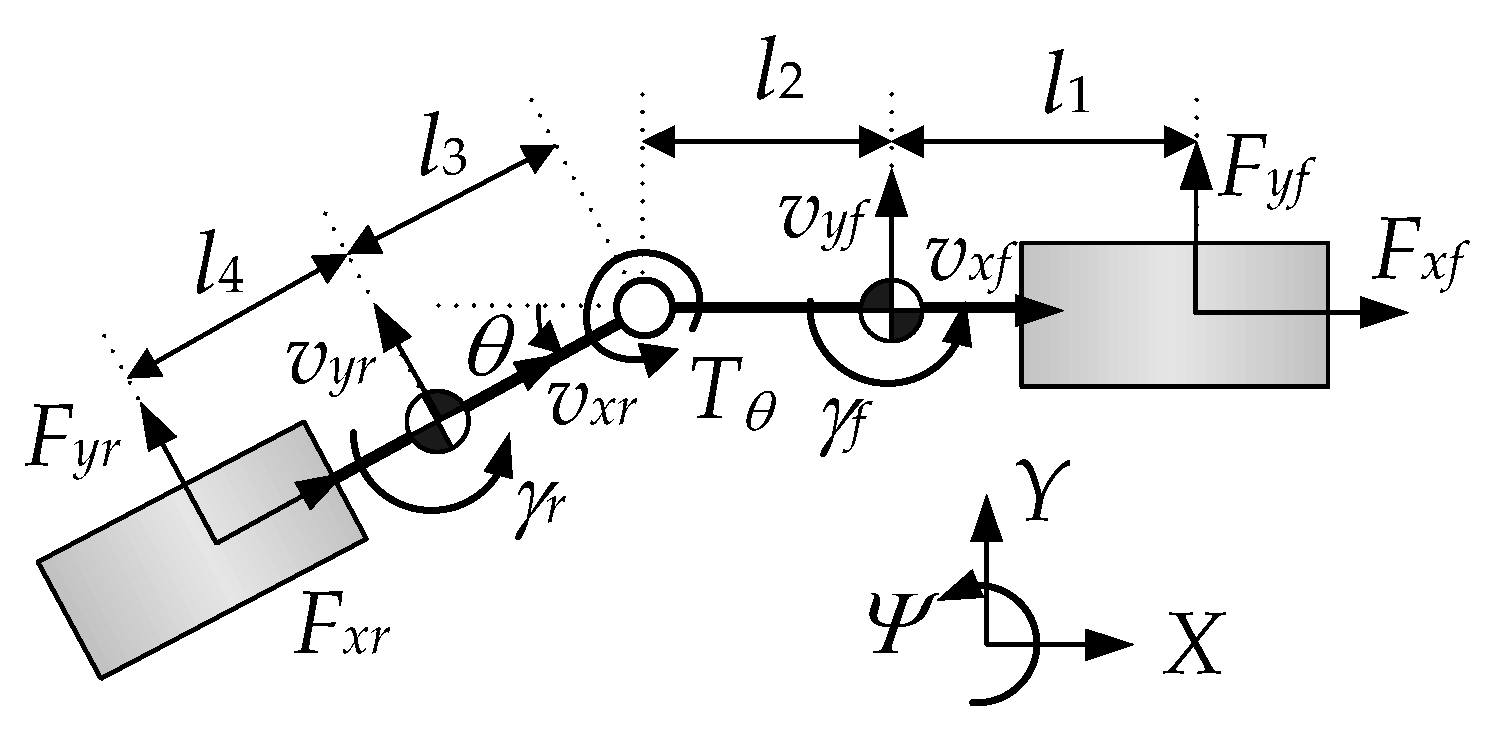
2. Modeling of Vehicle with Articulated Frame Steering
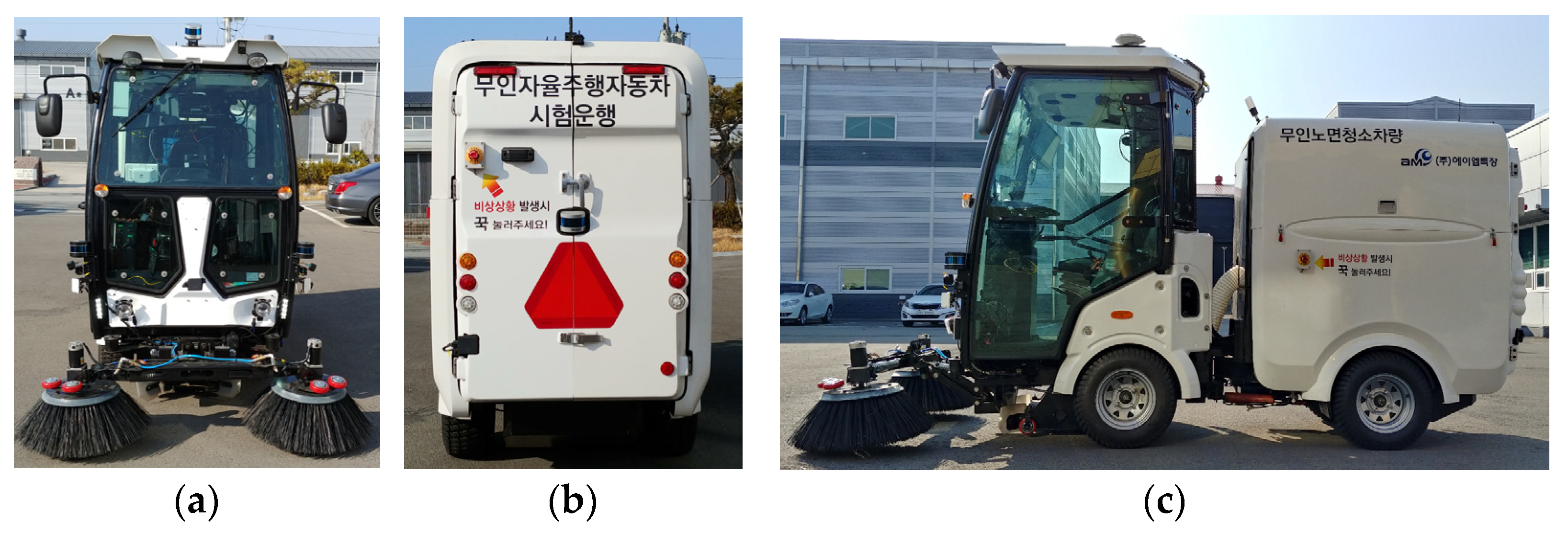
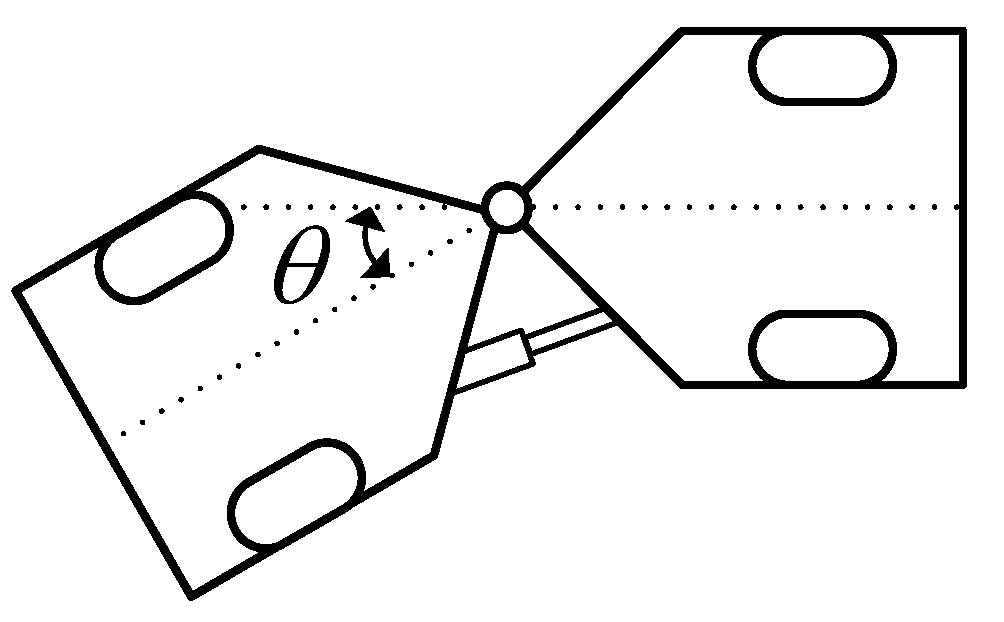
2.1. Vehicle Modeling
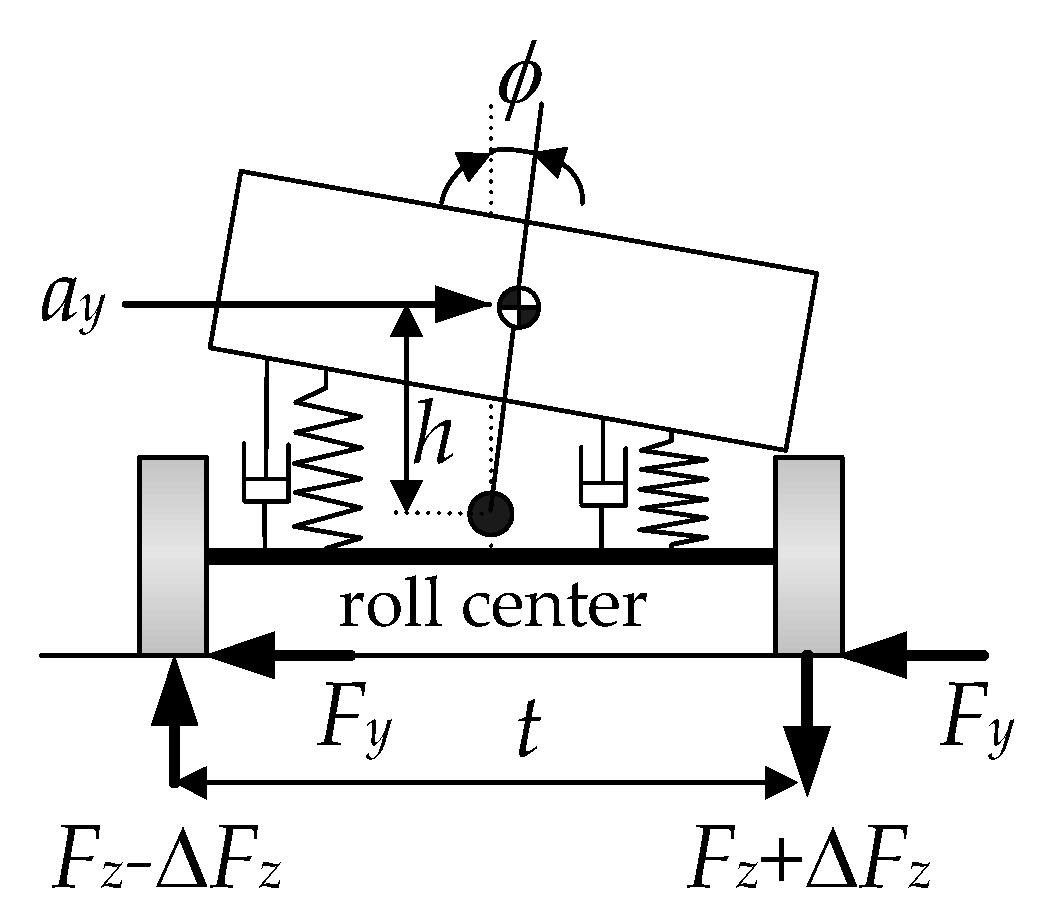
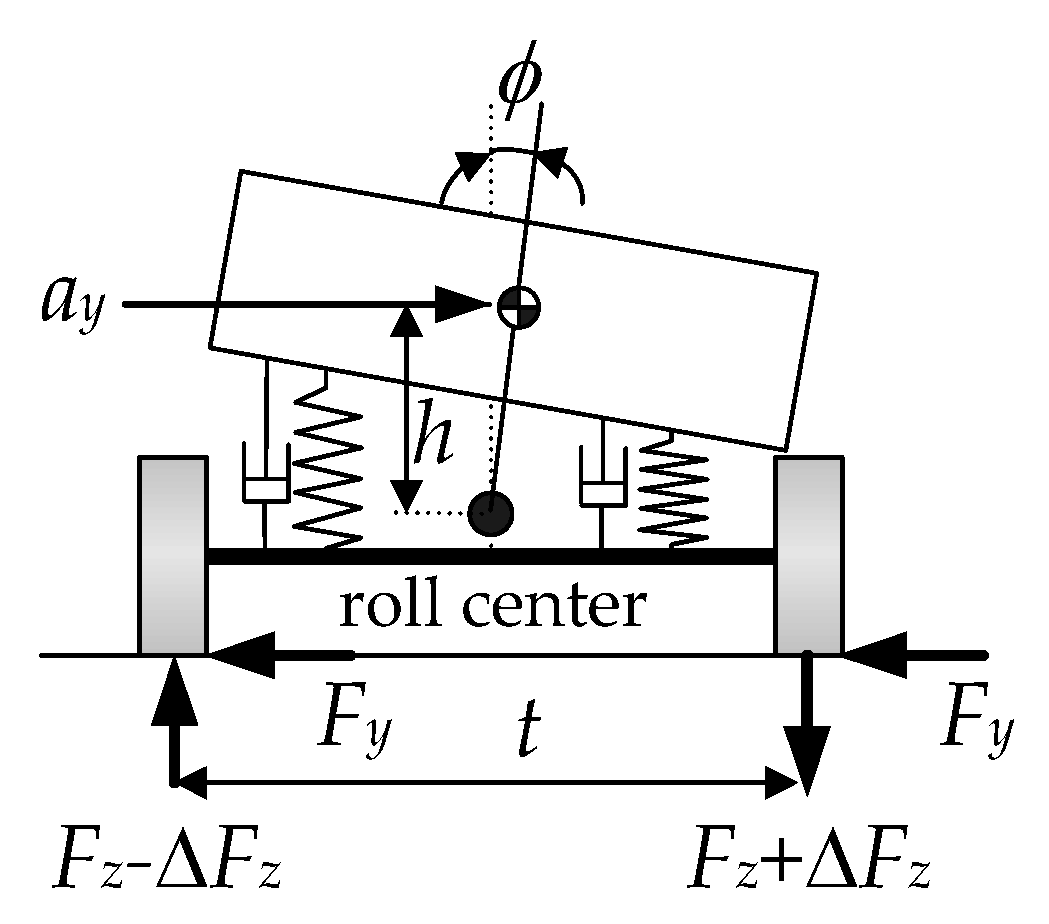
2.2. Load Transfer Ratio (LTR)
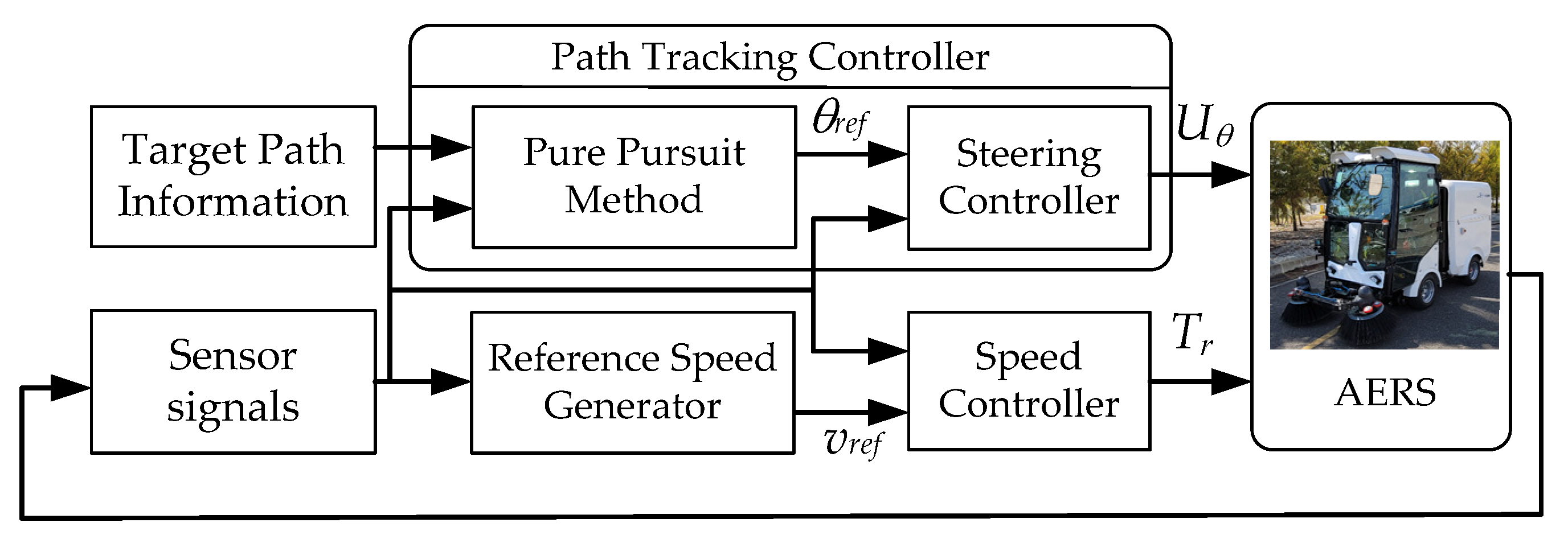
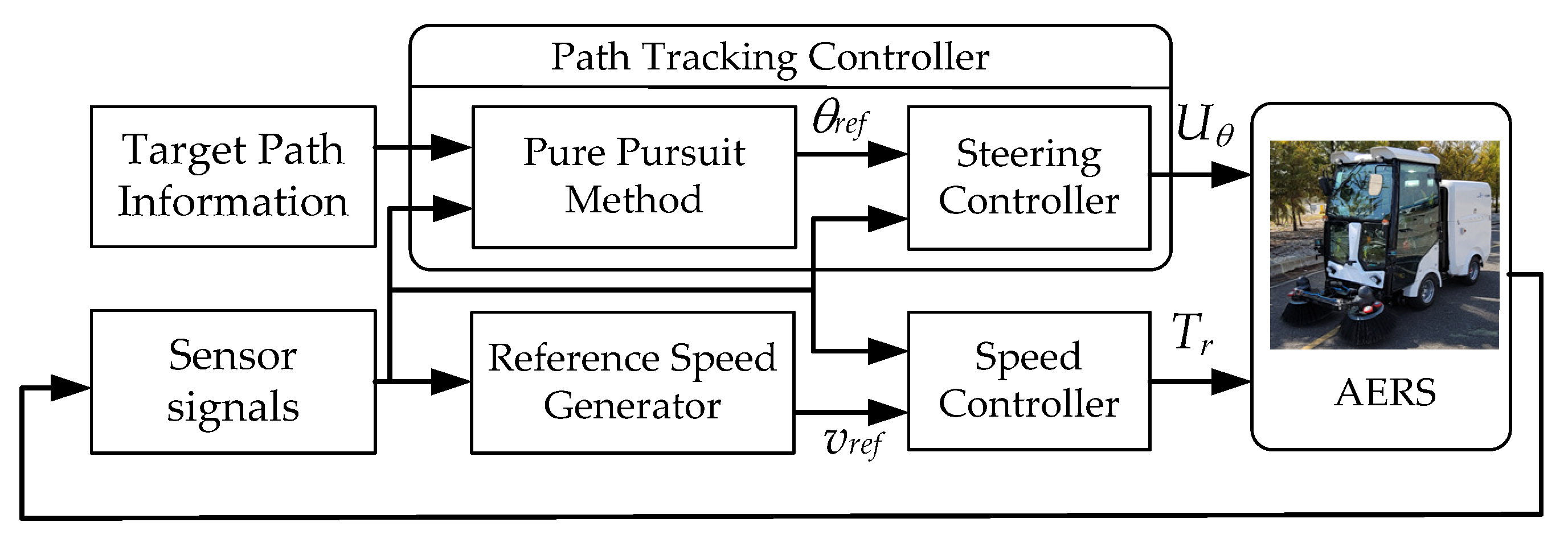
3. Controller Design
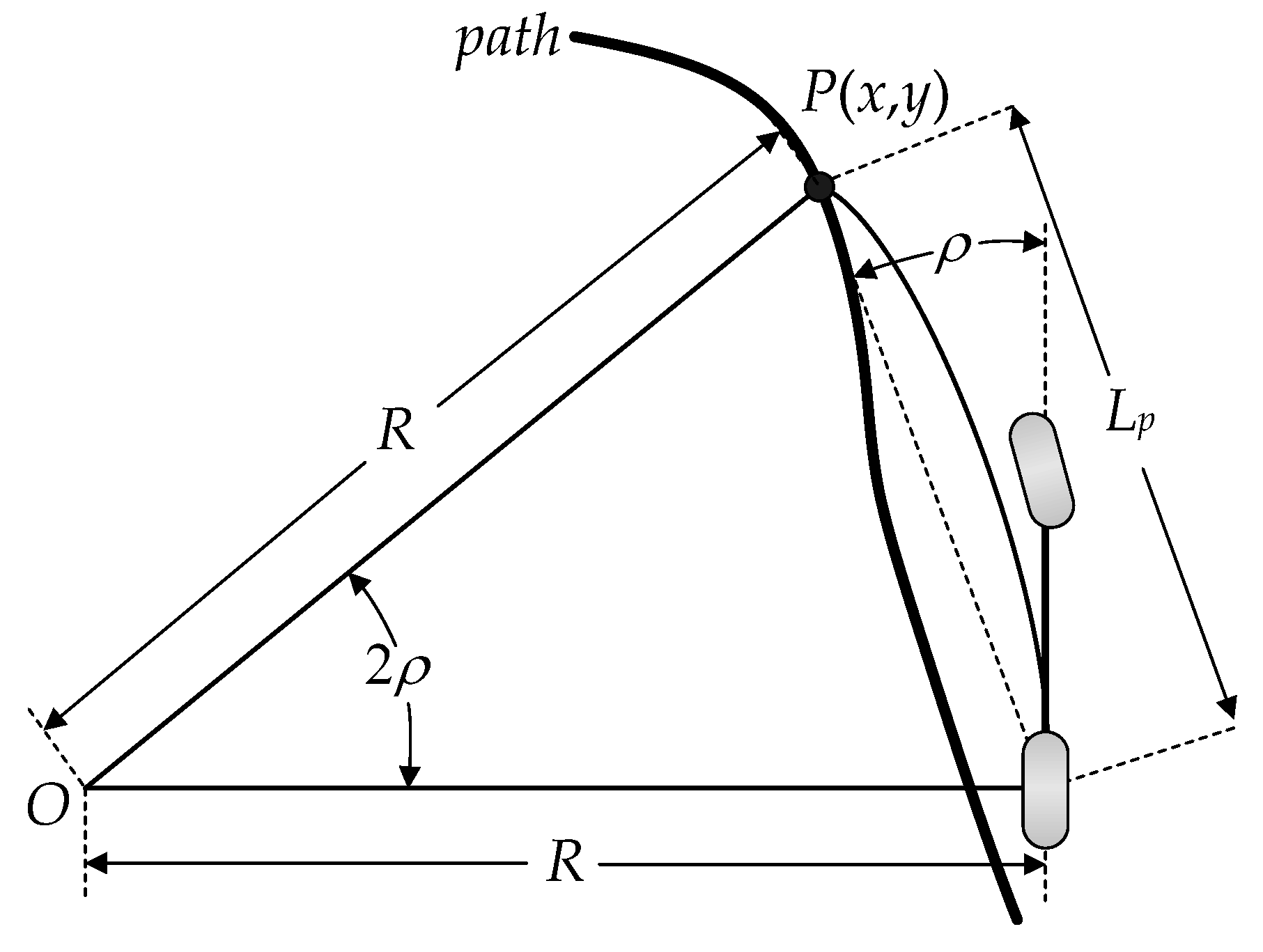
3.1. Pure Pursuit Metehod for Path Tracking Control
3.2. Design of Steering and Speed Controllers
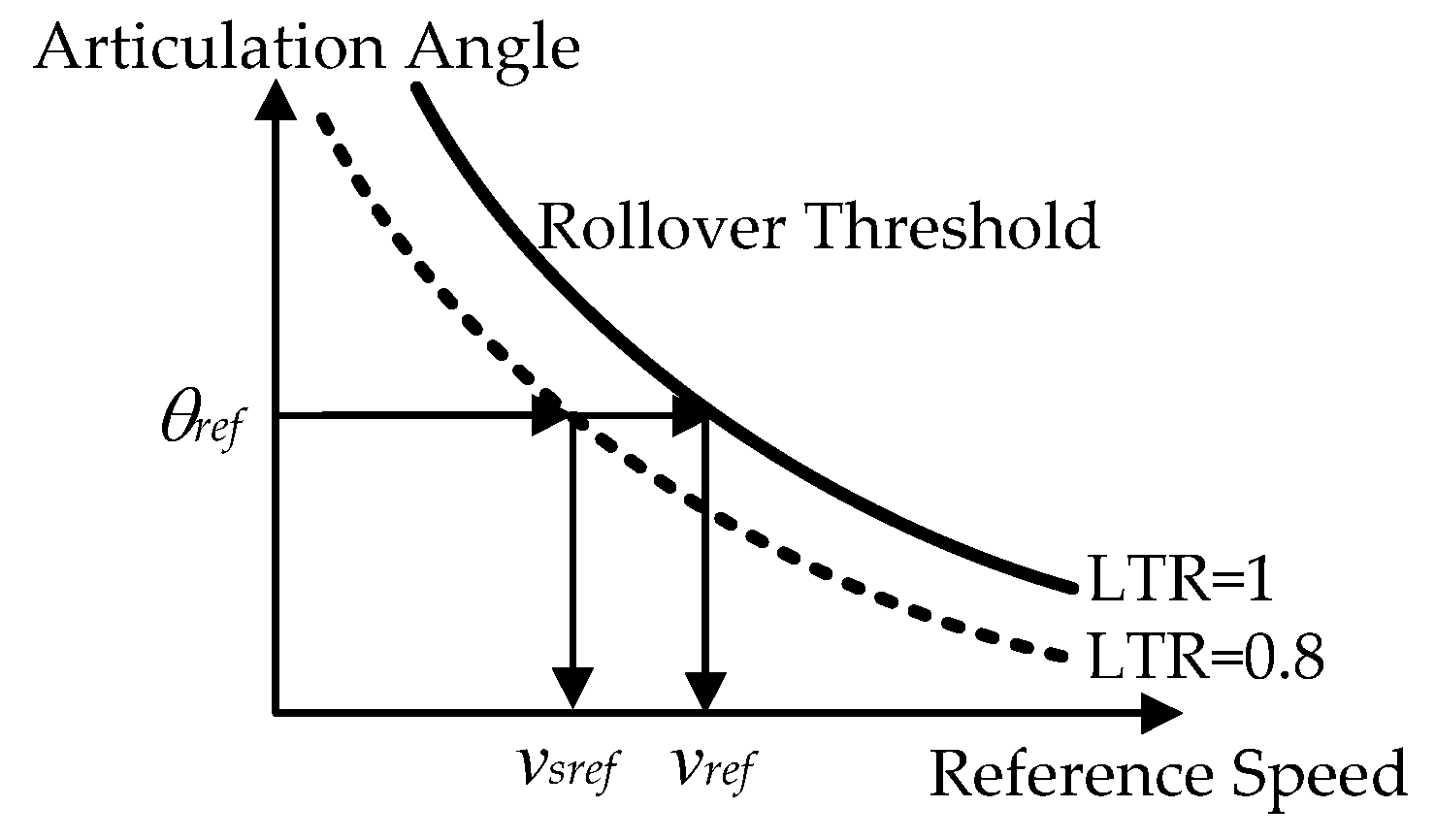
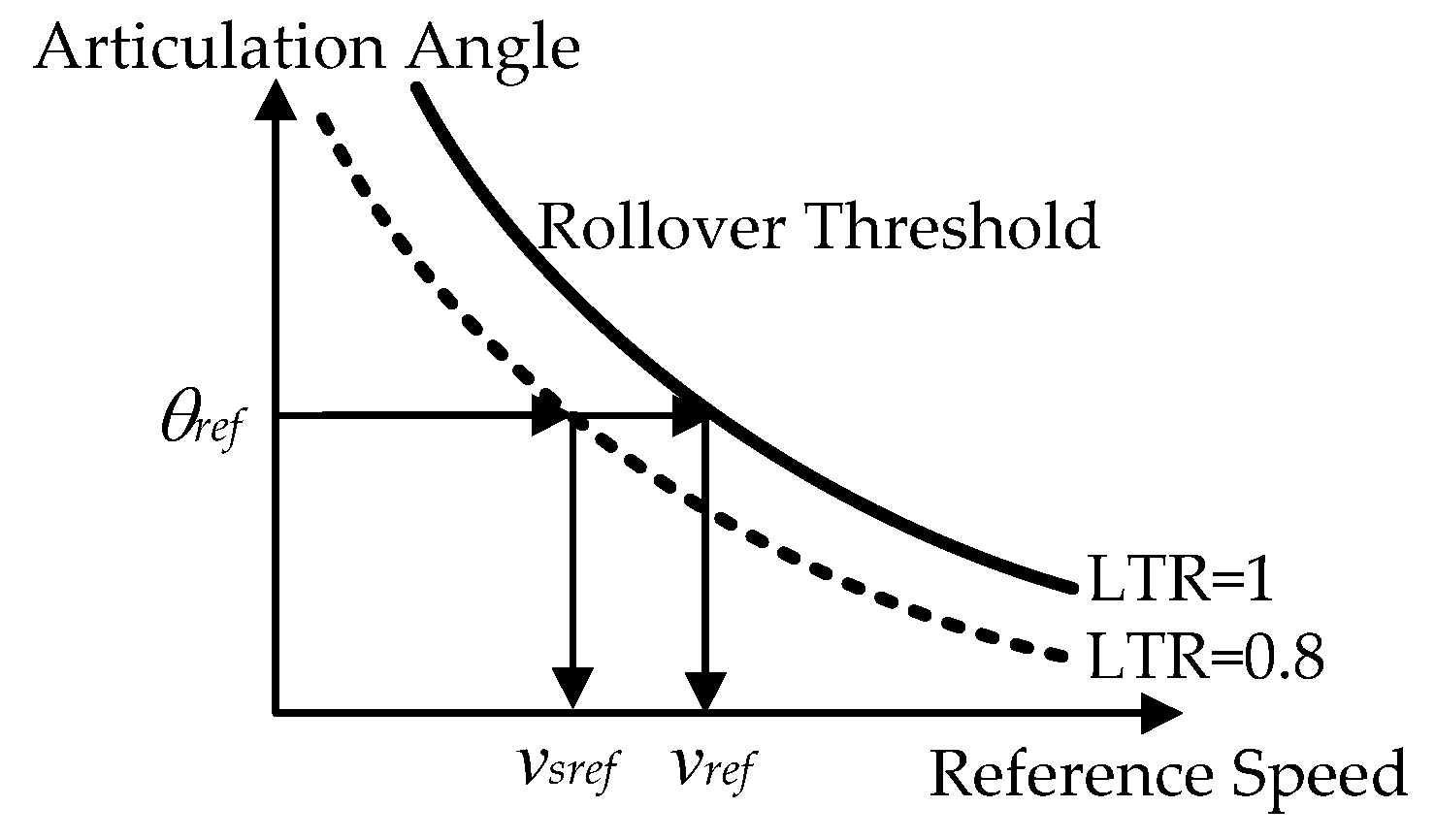
3.3. Rollover Prevention Scheme
4. Simulation
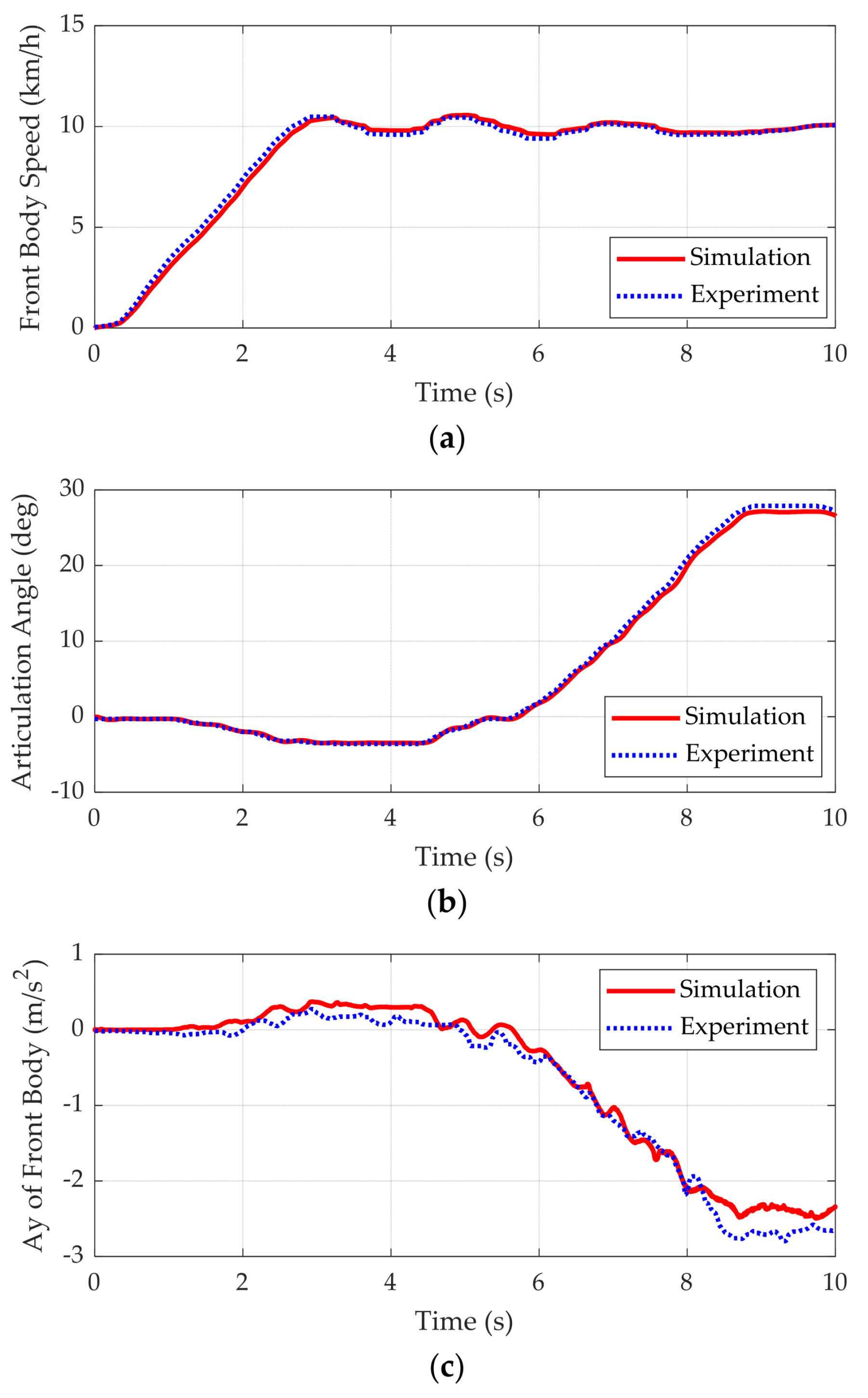
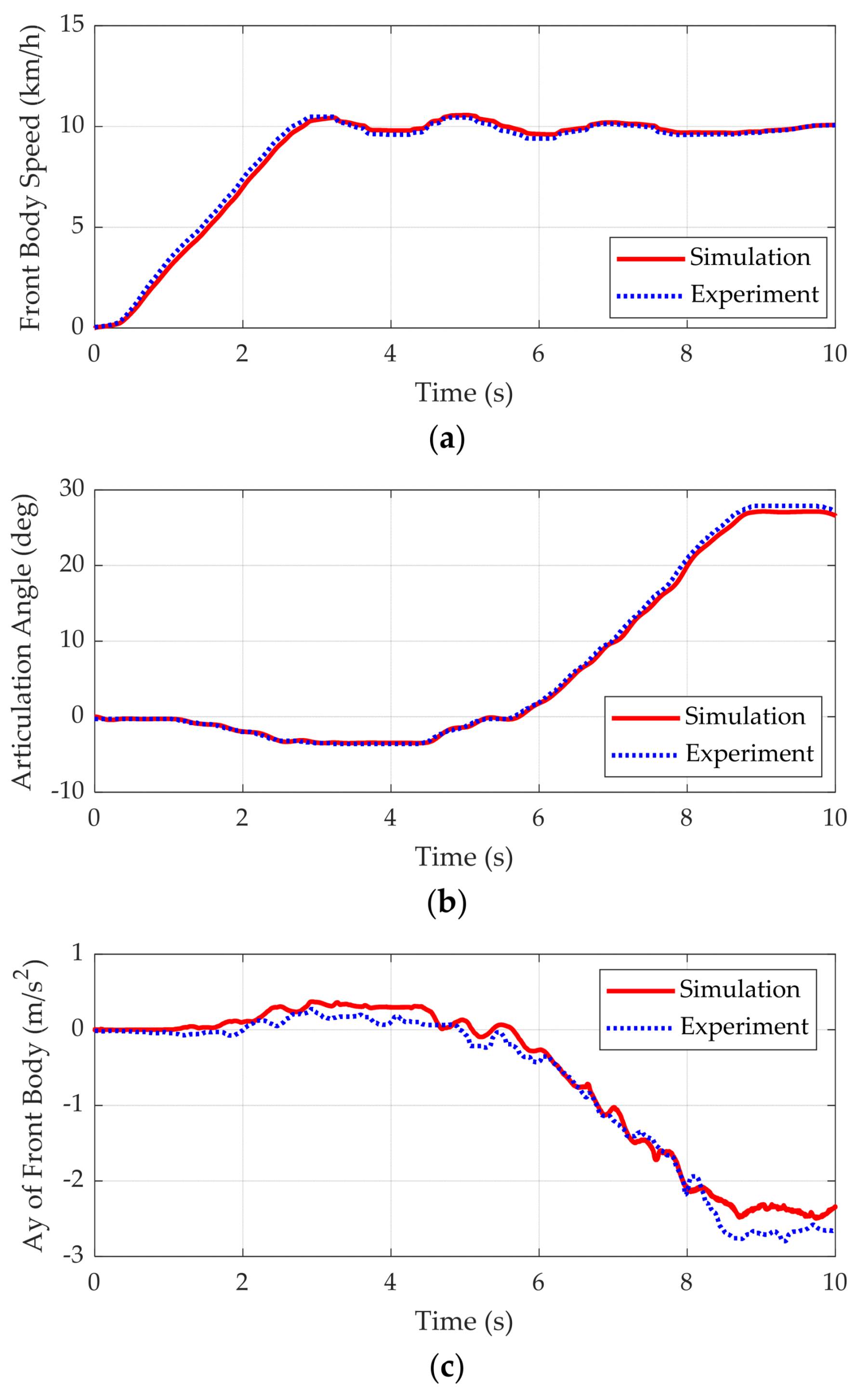
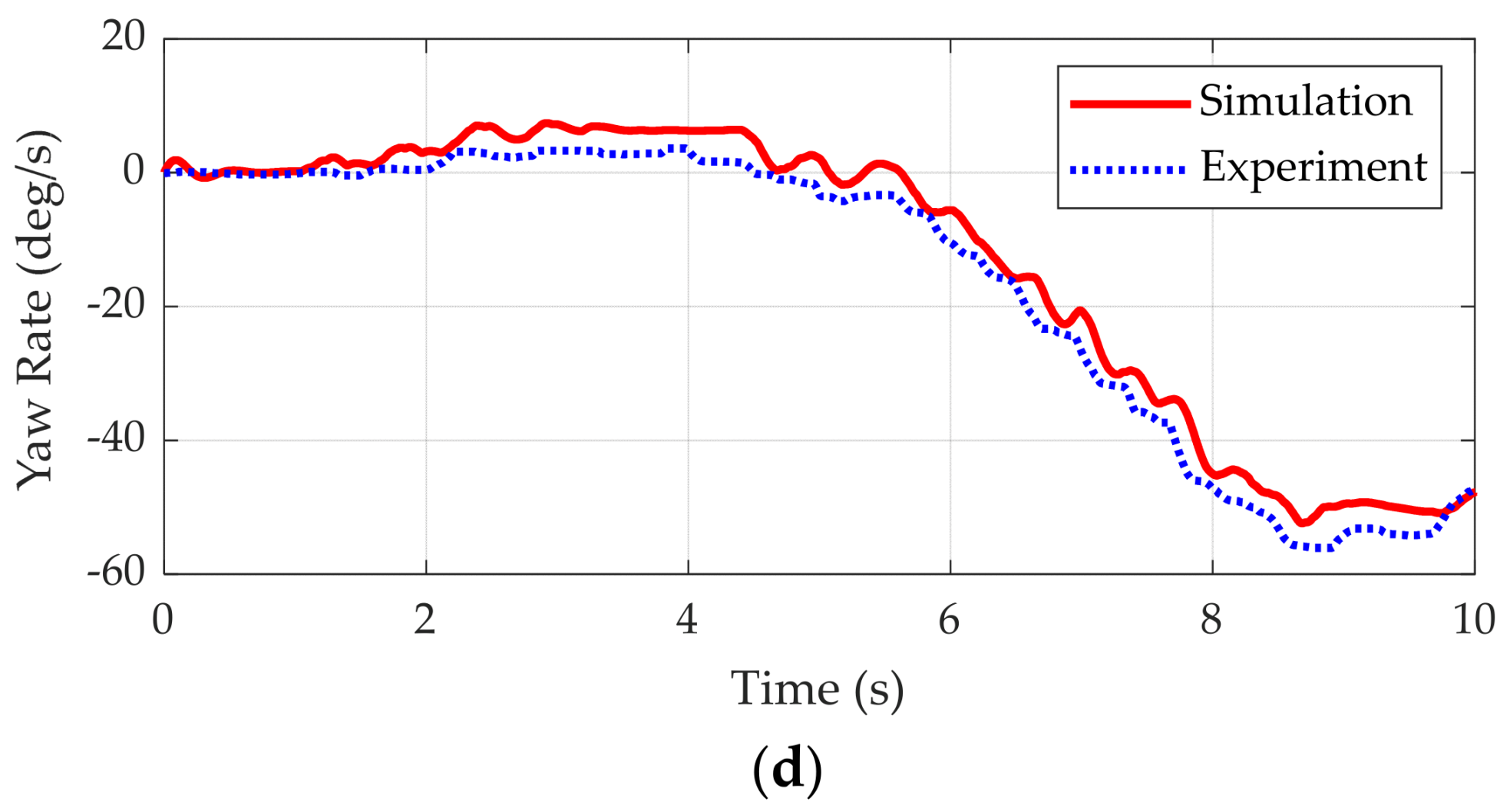
4.1. Model Validation with Experimental Data
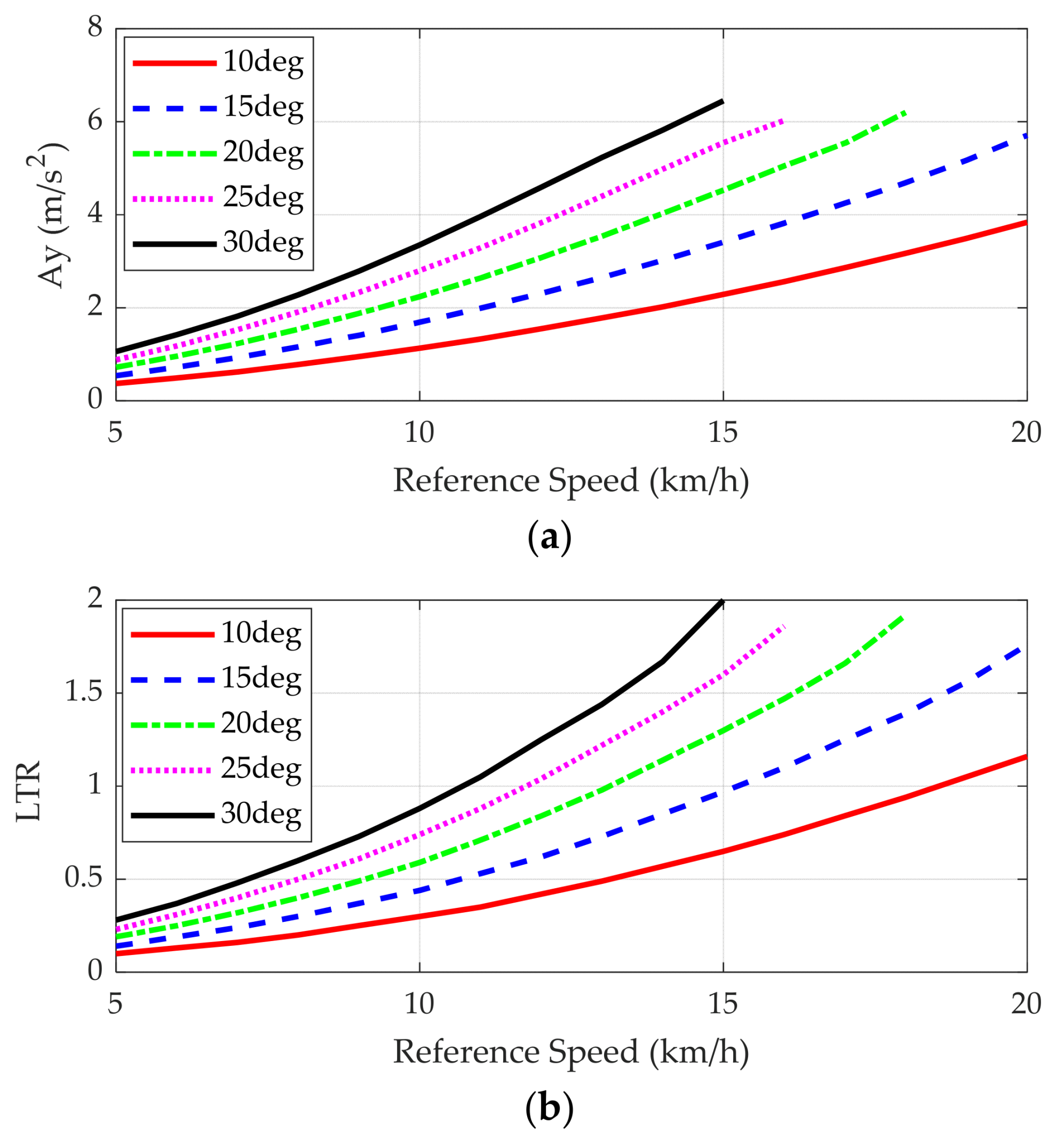
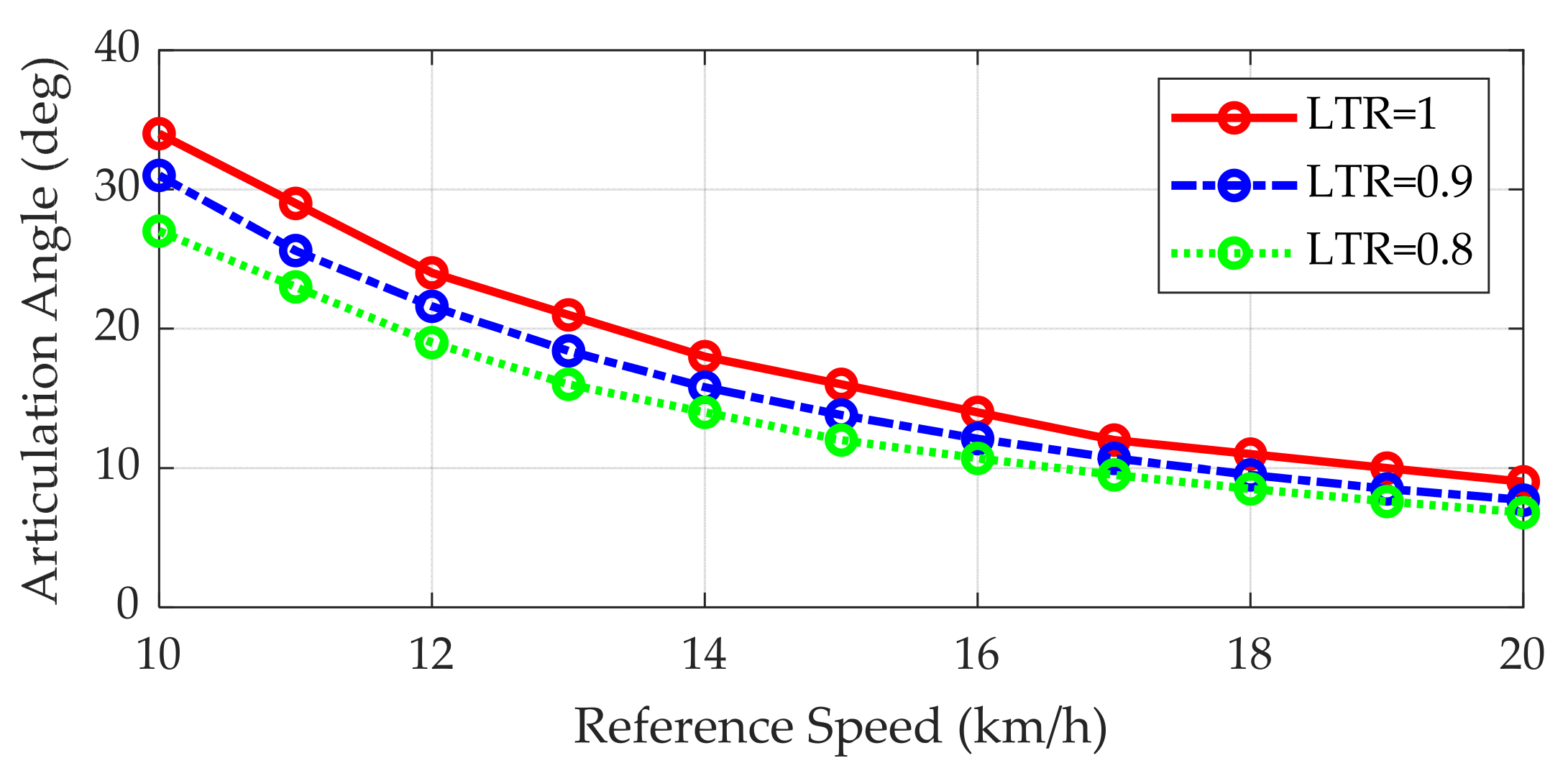
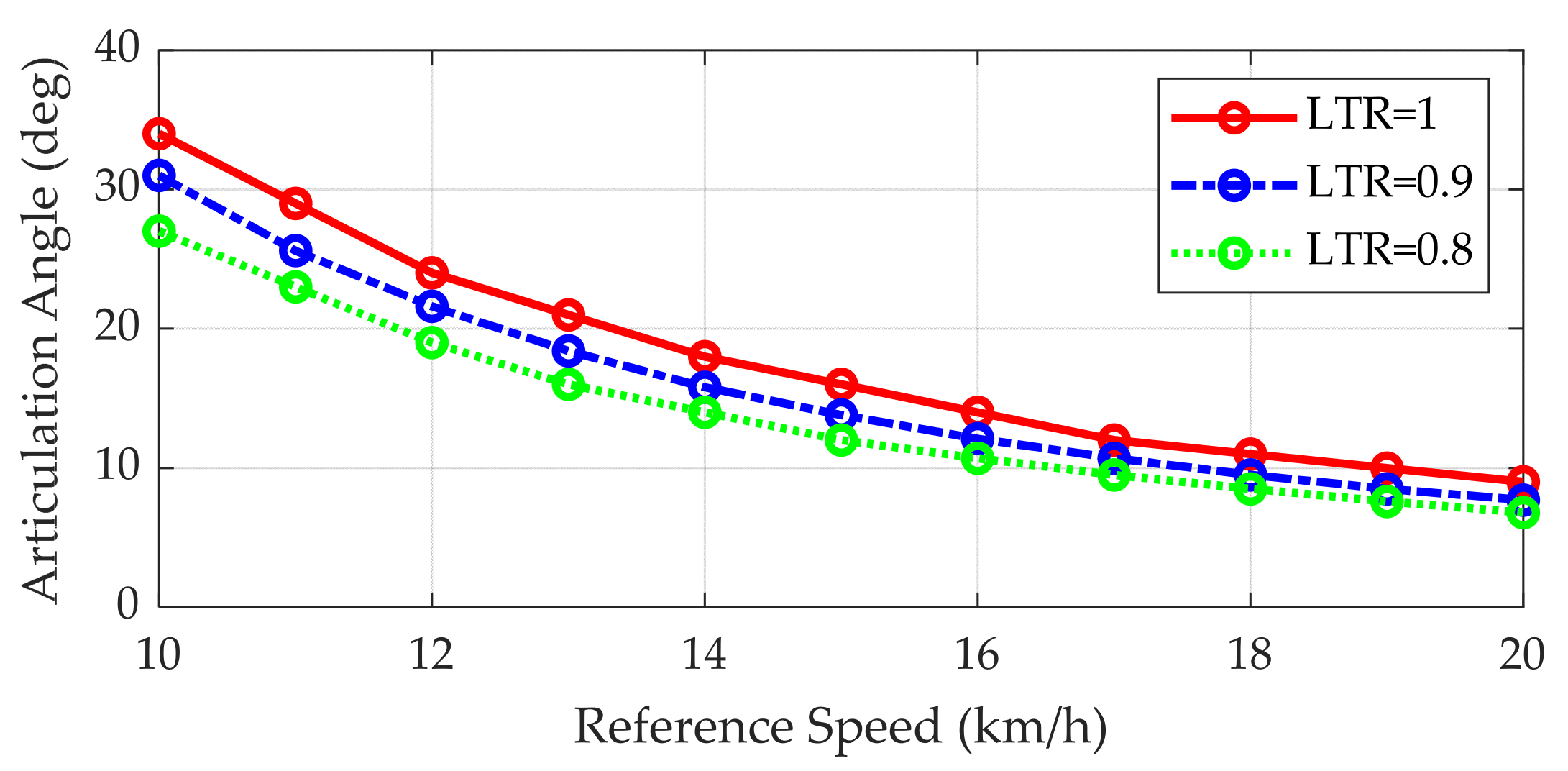
4.2. Analysis on Rollover Propensity with Open-Loop Steering
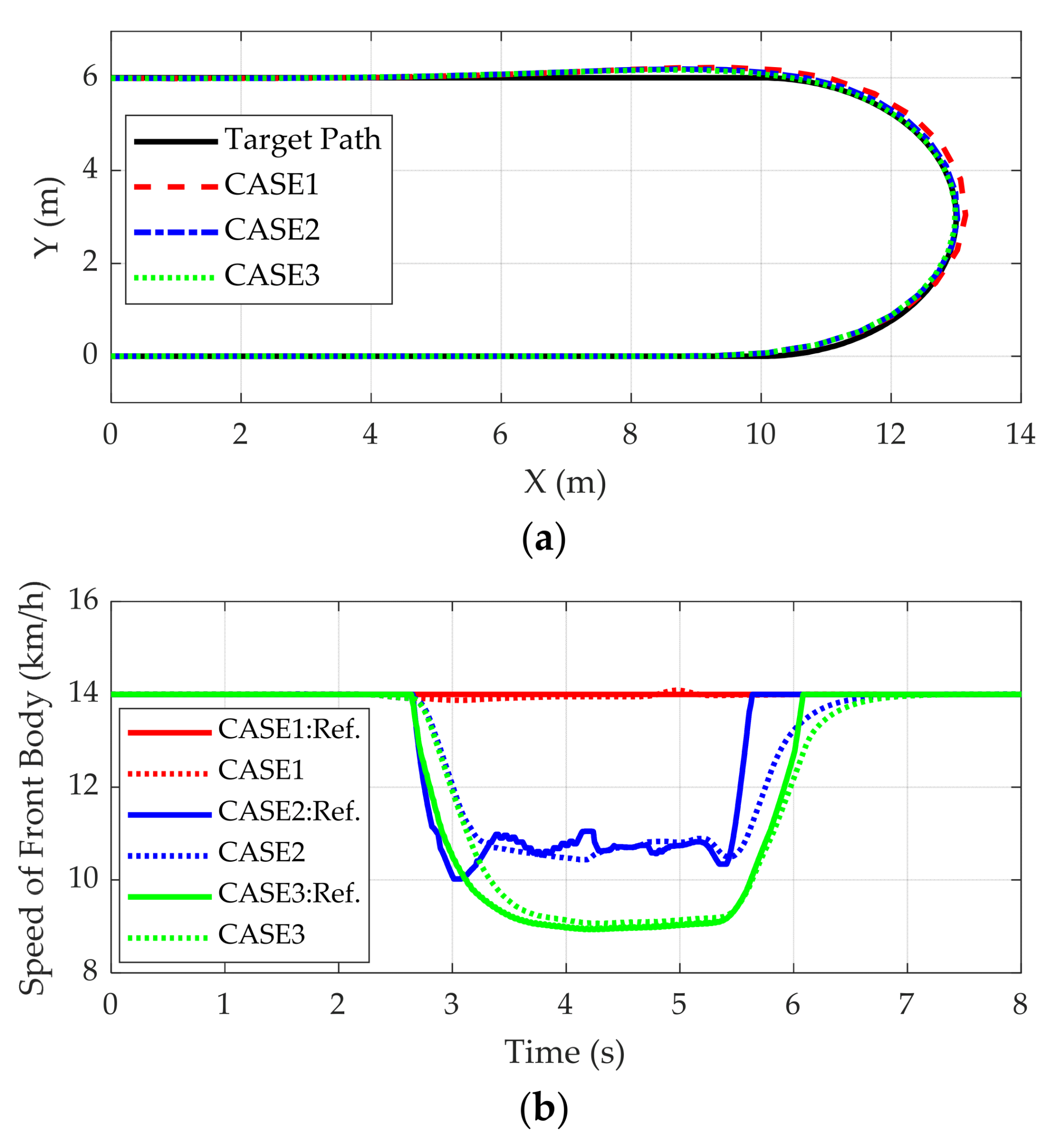
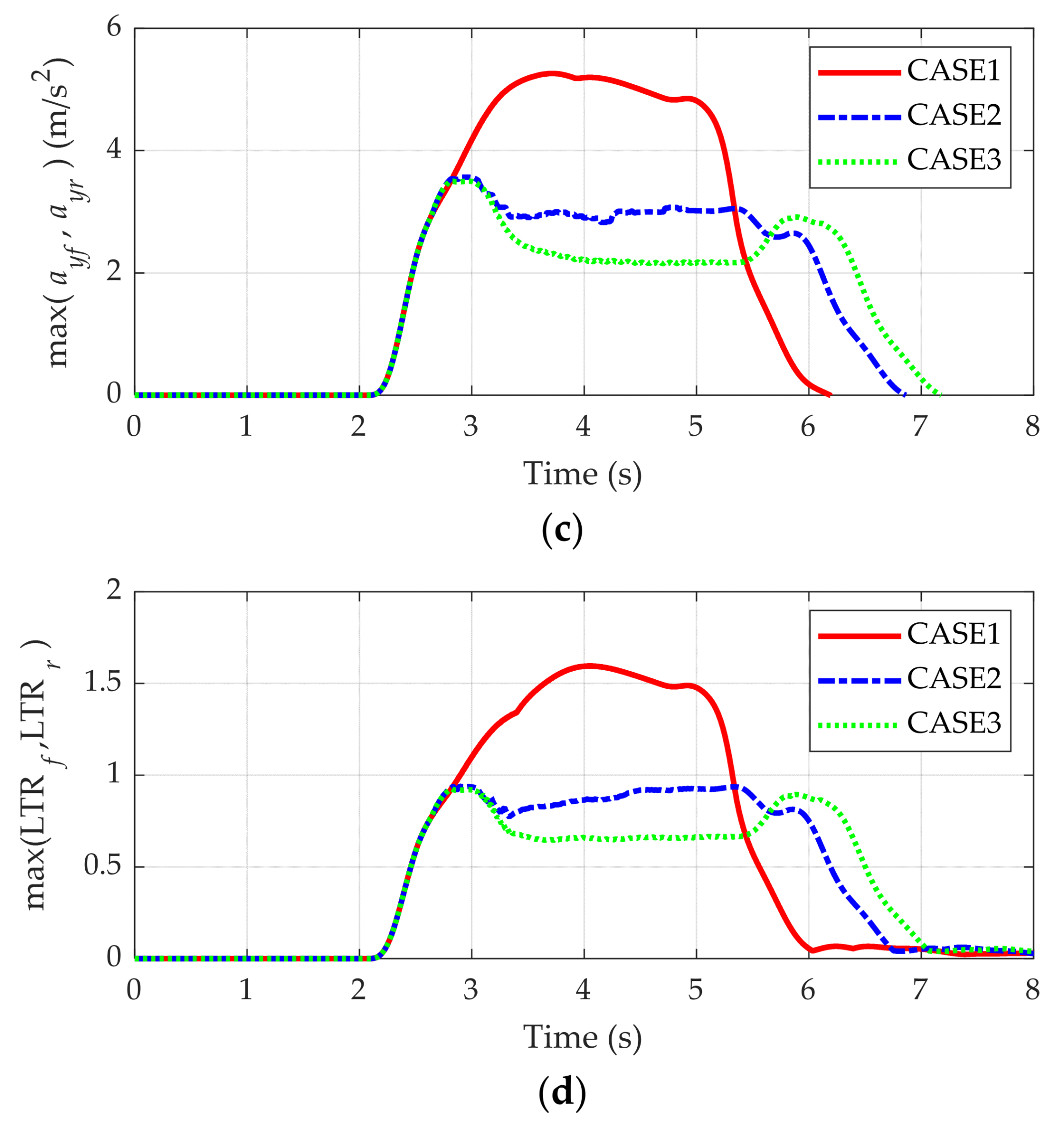
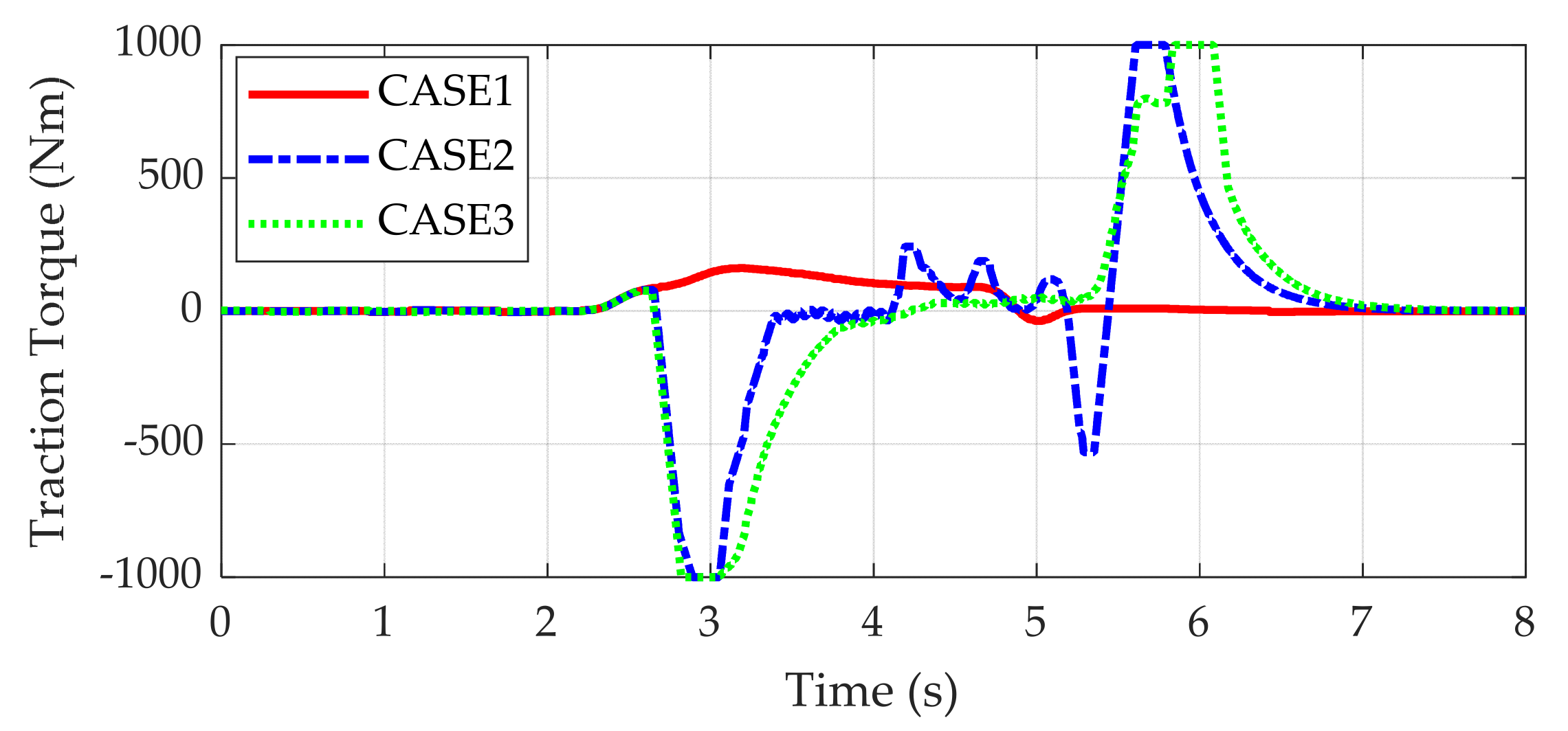
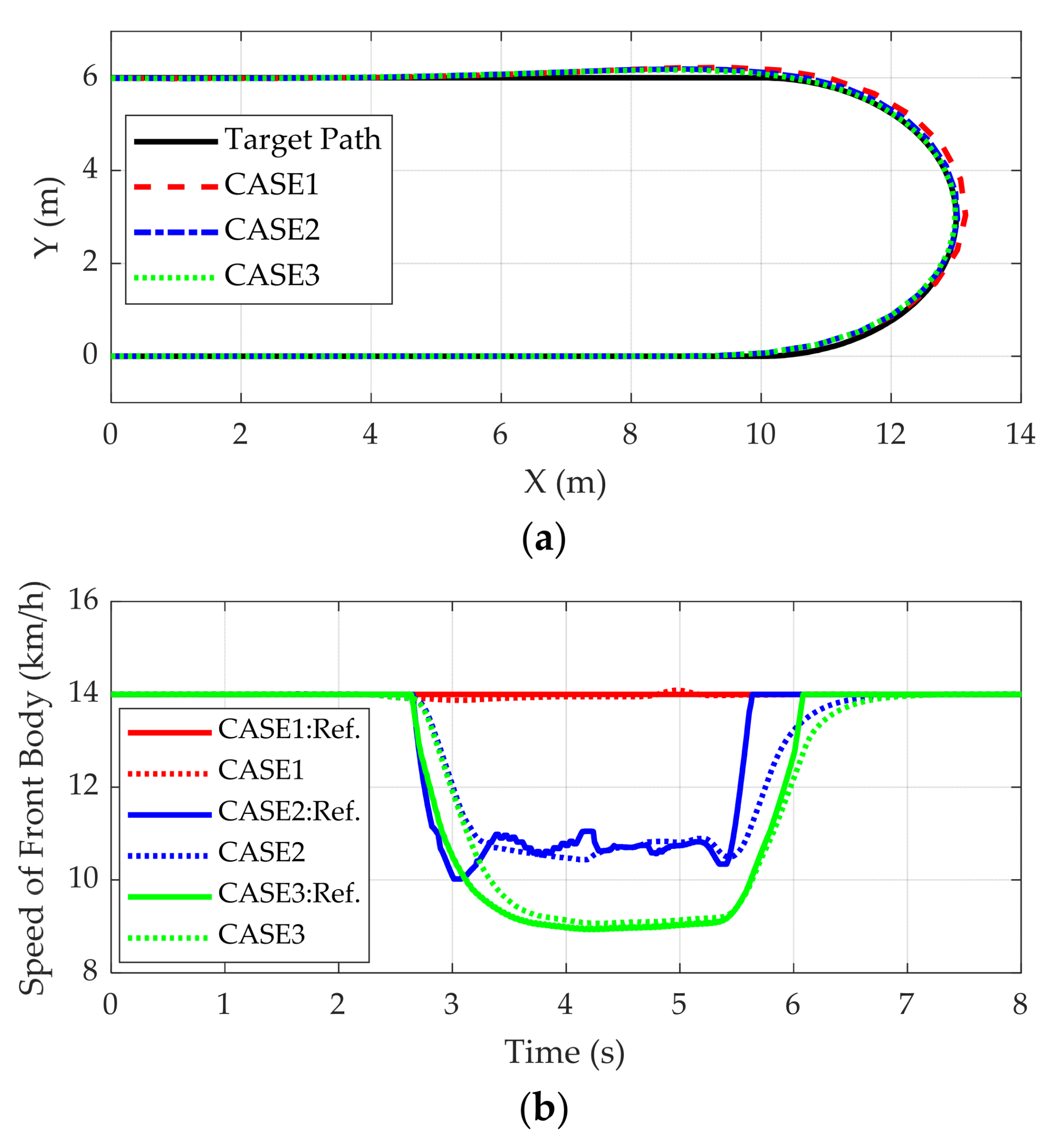
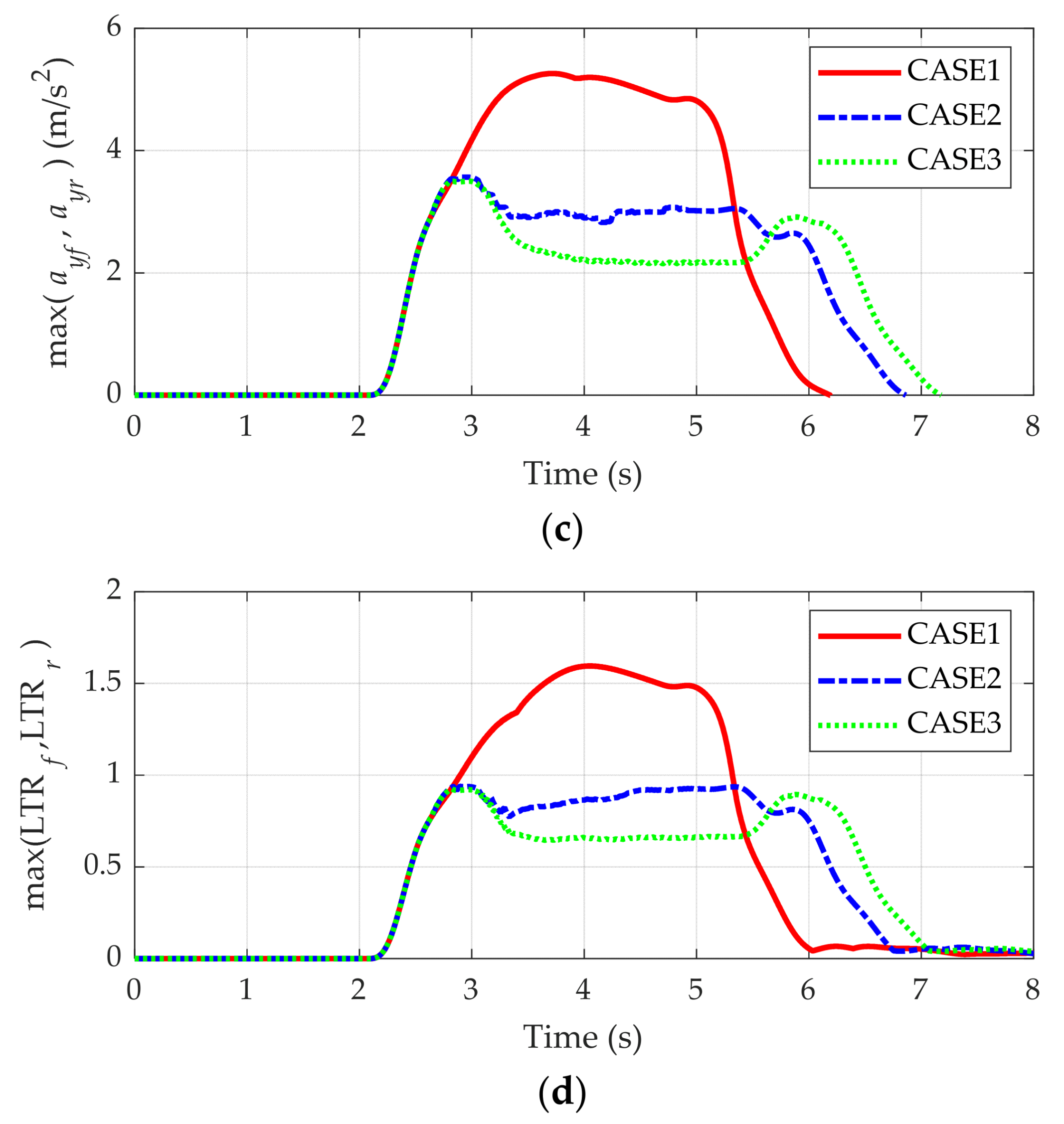
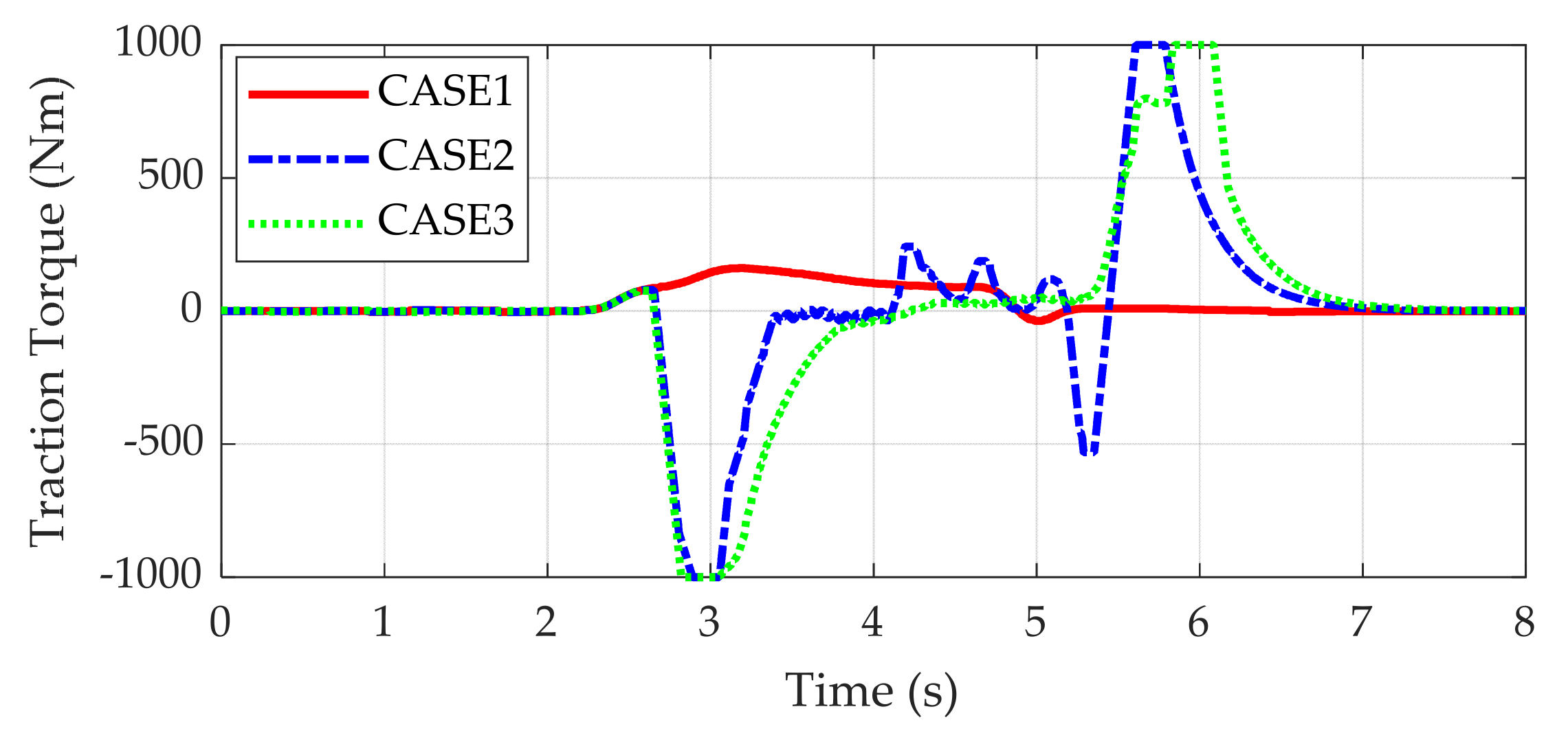
4.3. Rollover Prevention Control with Closed-Loop Steering
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| axf: axr | Longitudinal accelerations of front and rear bodies |
| ayf, ayr | Lateral accelerations of front and rear bodies |
| Cx, Cy | Longitudinal and lateral stiffness of a tire |
| Cθ | Torsional damping coefficient of AFS |
| Fxf, Fxr | Longitudinal tire forces of front and rear wheels |
| Fyf, Fyr | Lateral tire forces of front and rear wheels |
| Fzf, Fzr | Vertical tire forces of front and rear wheels |
| hf, hr | Heights of mass center of front and rear bodies from roll center |
| Izf, Izr | Yaw moment of inertia of front and rear bodies |
| Iωf, Iωr | Moment of inertia of front and rear tires |
| Kθ | Torsional stiffness of AFS |
| Kps, Kis, Kds | P-gain, I-gain, and D-gain of the PID steering controller |
| Kv | Gain of the sliding mode speed controller |
| L | Wheelbase, distance between front and rear axles |
| Lp | Look-ahead distance used in pure pursuit method |
| l1, l2, l3, l4 | Distances from CoG to front and rear axles in front and rear bodies |
| m | Vehicle total mass (= mf + mr) |
| mf, mr | Masses of front and rear bodies |
| rwf, rwr | Radii of front and rear tires |
| Tf, Tr | Traction/braking torques of front and rear wheels |
| Tθ | Torque applied at articulation point |
| tf, tr | Track widths of front and rear bodies |
| Uθ | Steering torque generated by hydraulic cylinder |
| vxf, vxr | Longitudinal velocities of front and rear bodies |
| vyf, vyr | Lateral velocities of front and rear bodies |
| vref, vx,ref | Reference speed generated by the reference speed generator |
| αf, αr | Slip angles of front and rear tires |
| γf,γr | Yaw rates of front and rear bodies |
| κ | Curvature of circular arc connecting target point and rear wheel |
| ρ | Angle between vehicle’s heading vector and look-ahead one |
| θ | Articulation angle between front and rear bodies |
| θref | Reference articulation angle calculated by the pure pursuit method |
| Articulation angular rate between front and rear bodies | |
| ∆Fx | Longitudinal force generated by speed controller |
| λφ,λρ | Slip ratios of front and rear tires |
| μ | Tire–road friction coefficient |
| ωf,ωr | Rotational speeds of front and rear tires |
References
- Peel, G.; Michielen, M.; Parker, G. Some aspects of road sweeping vehicle automation. In Proceedings of the 2001 IEEE/ASME International Conference on Advanced Intelligent Mechanics, Como, Italy, 8–12 July 2001; pp. 337–342. [Google Scholar]
- SAE. Surface Vehicle Standard, Self-Propelled Sweepers and Cleaning Equipment (J2130); SAE Inc.: Warrendale, PA, USA, 1977. [Google Scholar]
- Xu, H.; Xiao, J.; Feng, Y. Development and research status of road cleaning vehicle, International Conference on Electrical Automation and Mechanical Engineering. J. Phys. Conf. Ser. 2020, 1626, 012153. [Google Scholar] [CrossRef]
- Windecker, A.; Ruder, A. Fule economy, cost and greenhouse gas results for alternative fuel vehicles in 2011. Transp. Res. Part D 2013, 23, 33–40. [Google Scholar] [CrossRef]
- Hannan, M.A.; Hoque, M.M.; Mohamed, A.; Ayob, A. Review of energy storage systems for electric vehicle applications: Issues and challenges. Renew. Sustain. Energy Rev. 2017, 69, 771–789. [Google Scholar] [CrossRef]
- Donati, L.; Fontanini, T.; Tagliaferri, F.; Prati, A. An energy saving road sweeper using deep vision for garbage detection. Appl. Sci. 2020, 10, 8146. [Google Scholar] [CrossRef]
- Budich, R.; Hübner, M. Vehicle simulation of an electric street sweeper for substitution analysis. In Internationales Stuttgarter Symposium, Automobil- und Motorentechnik; Spinger: Berlin/Heidelberg, Germany, 2016; pp. 673–690. [Google Scholar]
- Zeng, D.; Yu, Z.; Xiong, L.; Fu, Z.; Li, Z.; Zhang, P.; Leng, B.; Shan, F. HFO-LADRC lateral motion controller for autonomous road sweeper. Sensors 2020, 20, 2274. [Google Scholar] [CrossRef] [PubMed]
- Dou, F.; Liu, W.; Huang, Y.; Liu, L.; Meng, Y. Modeling and path tracking for articulated steering vehicles. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 5263–5268. [Google Scholar]
- Xiong, L.; Fu, Z.; Zeong, D.; Leng, B. An optimized trajectory planner and motion controller framework for autonomous driving in unstructured environments. Sensors 2021, 21, 4409. [Google Scholar] [CrossRef]
- Excell, J. UK Engineers to Develop Autonomous Electric Street Sweeper. Available online: https://www.theengineer.co.uk/autonomous-electric-street-sweeper/ (accessed on 14 October 2021).
- Autonomous Sweeper from Berlin Startup Approved for Public Road Use in Singapore. Available online: https://www.prnewswire.com/news-releases/autonomous-sweeper-from-berlin-startup-approved-for-public-road-use-in-singapore-301208765.html (accessed on 15 January 2021).
- Self-Driving Road Sweepers to Go on Trial at One-North, NTU and CleanTech Park in Jurong. Available online: https://www.channelnewsasia.com/singapore/self-driving-road-sweepers-trial-ntu-one-north-cleantech-park-407061 (accessed on 14 January 2021).
- Boschung, Urban-Sweeper S2.0 Autonomous. Available online: https://www.boschung.com/product/urban-sweeper-s2-0-autonomous/ (accessed on 14 October 2021).
- Korea IT News, Gwangju-Si and Korea Institute of Industrial Technology to Introduce Two Unmanned Special Vehicles Next Month. Available online: https://english.etnews.com/20201118200004 (accessed on 20 November 2020).
- Lei, T.; Wang, J.; Yao, Z. Modelling and stability analysis of articulated vehicles. Appl. Sci. 2021, 11, 3663. [Google Scholar] [CrossRef]
- Yin, Y.; Rakheja, S.; Yang, J.; Boileau, P.-E. Design optimization of an articulated frame steering system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 232, 1339–1352. [Google Scholar] [CrossRef]
- Azad, N.L.; Khajepour, A.; Mcphee, J. Robust state feedback stabilization of articulated steer vehicles. Veh. Syst. Dyn. 2007, 45, 249–275. [Google Scholar] [CrossRef]
- Xu, T.; Ji, X.; Shen, Y. A novel assist-steering method with direct yaw moment control for distributed drive articulated heavy vehicle. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 214–224. [Google Scholar]
- Paden, B.; Cap, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef] [Green Version]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Shiroma, N.; Ishikawa, S. Nonlinear straight path tracking control for an articulated steering type vehicle. In Proceedings of the ICROS-SICE International Joint Conference 2009, Fukuoka, Japan, 18–21 August 2009; pp. 2206–2211. [Google Scholar]
- Yao, W.; Pang, Z.; Chi, R.; Shao, W.; Yang, D. Intelligent sweeper path tracking control based on optimal iterative learning. In Proceedings of the 2020 IEEE 9th Data Driven Control and Learning Systems Conference (DDCLS), Liuzhou, China, 20–22 November 2020; pp. 600–605. [Google Scholar]
- Yim, S. Design of a preview controller for vehicle rollover prevention. IEEE Trans. Veh. Technol. 2011, 60, 4217–4226. [Google Scholar] [CrossRef]
- Yim, S.; Park, Y.; Yi, K. Design of active suspension and electric stability program for rollover prevention. Int. J. Automot. Technol. 2010, 11, 147–153. [Google Scholar] [CrossRef]
- Yoon, J.; Yim, S.; Cho, W.; Koo, B.; Yi, K. Design of an unified chassis controller for rollover prevention, manoeuvrability and lateral stability. Veh. Syst. Dyn. 2010, 48, 1247–1268. [Google Scholar] [CrossRef]
- Qian, X.; Wang, C.; Zhao, W. Rollover prevention and path following control of integrated steering and braking systems. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1644–1659. [Google Scholar] [CrossRef]
- Tian, Y.; Huang, K.; Cao, X.; Liu, Y.; Ji, X. A hierarchical adaptive control framework of path tracking and roll stability for intelligent heavy vehicle with MPC. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2933–2946. [Google Scholar] [CrossRef]
- Xu, T.; Wang, X. Roll stability and path tracking control strategy considering driver in the loop. IEEE Access 2021, 9, 46210–46222. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Huang, K. Robust active steering control for vehicle rollover prevention. Int. J. Model. Identif. Control. 2019, 32, 70–84. [Google Scholar] [CrossRef]
- Gao, L.; Jin, C.; Liu, Y.; Ma, F.; Feng, Z. Hybrid model-based analysis of underground articulated vehicles steering characteristics. Appl. Sci. 2019, 9, 5274. [Google Scholar] [CrossRef] [Green Version]
- Ataei, M.; Khajepour, A.; Jeon, S. A general rollover index for tripped and un-tripped rollovers on flat and sloped roads. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 233, 304–316. [Google Scholar] [CrossRef]
- Cho, W.; Yoon, J.; Kim, J.; Hur, J.; Yi, K. An investigation into unified chassis control scheme for optimised vehicle stability and maneuverability. Veh. Syst. Dyn. 2008, 46, 87–105. [Google Scholar] [CrossRef]
- Omead, A. Integrated Mobile Robot Control. In Technical Report CMU-RI-TR-90-17; Carnegie Mellon University Robotics Institute: Pittsburgh, PA, USA, May 1990. [Google Scholar]
- Oxford Technical Solutions Ltd. RT1003, The Compact INS for Space Constrained Vehicle Testing. 2021. Available online: https://www.oxts.com/products/rt1003-lightweight-gnss-ins-for-automotive-testing/ (accessed on 5 November 2021).
- Robert Bosch GmbH. Steering-angle Sensor. 2021. Available online: https://www.bosch-mobility-solutions.com/en/solutions/sensors/steering-angle-sensor/ (accessed on 5 November 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| mf | 778.0 kg | mr | 1076.0 kg |
| Izf | 362.0 kg m2 | Izr | 543.0 kg m2 |
| l2 | 0.605 m | l3 | 0.895 m |
| rwf, rwr | 0.28 m | Iwf, Iwr | 1.02 kg m2 |
| Kθ | 500 Nm/rad | Cθ | 200 Nm⋅s/rad |
| tf | 0.93 m | tr | 0.93 m |
| hf | 1.2 m | hr | 1.4 m |
| Cx | 65,673 N/rad | Cy | 60,892 N/rad |
| μ | 0.85 |
| vref (km/h) | θref (deg) | ayf (m/s2) | ayr (m/s2) | LTRf | LTRr |
|---|---|---|---|---|---|
| 18.5 | 10.0 | 3.34 | 3.25 | 0.88 | 1.00 |
| 15.1 | 15.0 | 3.51 | 3.24 | 0.91 | 0.99 |
| 13.2 | 20.0 | 3.63 | 3.30 | 0.96 | 1.01 |
| 11.8 | 25.0 | 3.72 | 3.29 | 0.98 | 1.01 |
| 10.7 | 30.0 | 3.78 | 3.25 | 0.99 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yim, S.; Kim, W. Rollover Prevention Control for Autonomous Electric Road Sweeper. Electronics 2021, 10, 2790. https://doi.org/10.3390/electronics10222790
Yim S, Kim W. Rollover Prevention Control for Autonomous Electric Road Sweeper. Electronics. 2021; 10(22):2790. https://doi.org/10.3390/electronics10222790
Chicago/Turabian StyleYim, Seongjin, and Wongun Kim. 2021. "Rollover Prevention Control for Autonomous Electric Road Sweeper" Electronics 10, no. 22: 2790. https://doi.org/10.3390/electronics10222790
APA StyleYim, S., & Kim, W. (2021). Rollover Prevention Control for Autonomous Electric Road Sweeper. Electronics, 10(22), 2790. https://doi.org/10.3390/electronics10222790