

Optimizing Underwater Image Restoration and Depth Estimation with Light Field Images


Abstract
1. Introduction
- We have introduced an underwater light propagation model for image restoration and developed a method to estimate water body attenuation parameters and backscatter;
- We proposed a method for underwater image depth estimation that utilizes the relationship between blurriness and scene depth as one of the clues for estimating the depth of underwater light field images, thereby improving the accuracy of underwater scene depth estimation;
- In an experimental water tank environment, we demonstrated through extensive experimental data that our method achieves higher depth estimation accuracy and better restoration effects compared to previous methods.
2. Related Work
3. Method
3.1. Underwater Image Formation Model
3.2. Coefficients Estimation
3.2.1. and Estimation
3.2.2. Estimation
3.3. Depth Estimation
3.3.1. Construction of Blur Clue Cost
3.3.2. Single Image Preprocessing
3.3.3. Depth Cue Fusion and Depth Estimation
3.4. Underwater LF Image Restoration
4. Experimental Results
4.1. Experimental Methodology
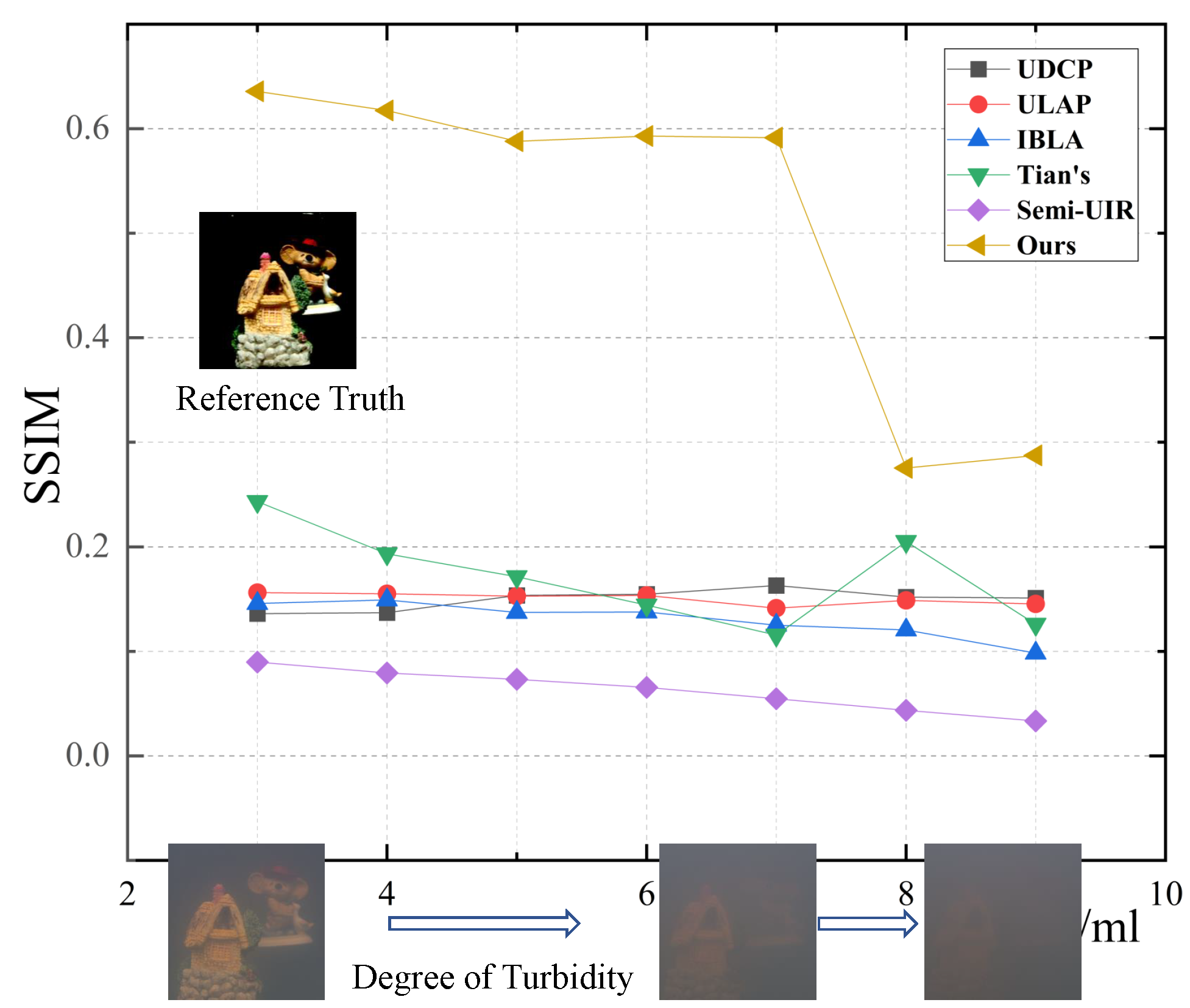
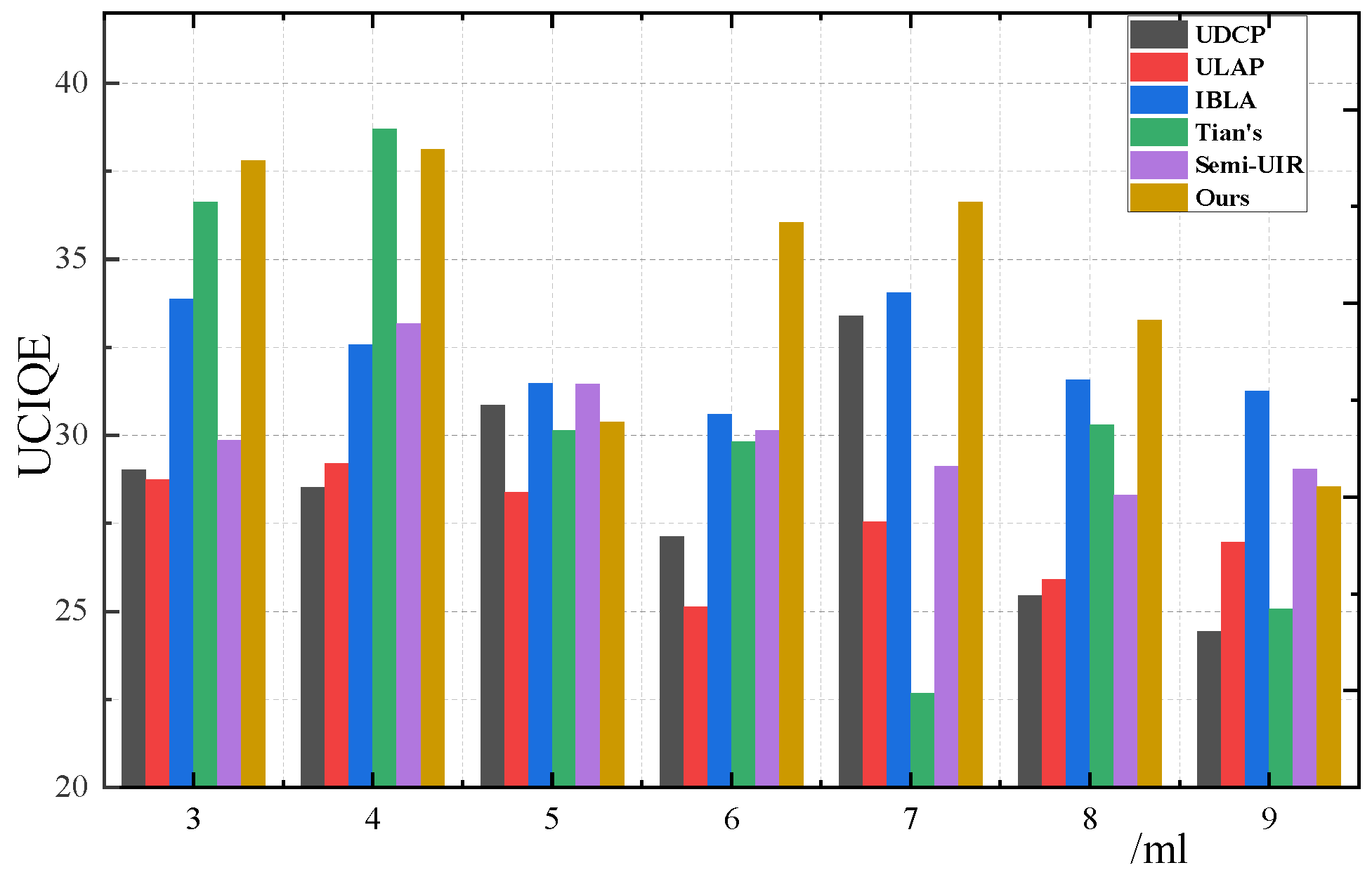
4.2. Results Comparisons
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schechner, Y.; Karpel, N. Clear underwater vision. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; Volume 1, p. I. [Google Scholar] [CrossRef]
- Roser, M.; Dunbabin, M.; Geiger, A. Simultaneous underwater visibility assessment, enhancement and improved stereo. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3840–3847. [Google Scholar] [CrossRef]
- Tian, J.; Murez, Z.; Cui, T.; Zhang, Z.; Kriegman, D.; Ramamoorthi, R. Depth and Image Restoration from Light Field in a Scattering Medium. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2420–2429. [Google Scholar] [CrossRef]
- Lu, H.; Li, Y.; Uemura, T.; Kim, H.; Serikawa, S. Low illumination underwater light field images reconstruction using deep convolutional neural networks. Future Gener. Comput. Syst. 2018, 82, 142–148. [Google Scholar] [CrossRef]
- Lu, H.; Li, Y.; Zhang, Y.; Chen, M.; Serikawa, S.; Kim, H. Underwater Optical Image Processing: A Comprehensive Review. Mob. Netw. Appl. 2017, 22, 1204–1211. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, B.; Su, X.; Wang, L.; Li, K. Underwater Imaging Based on LF and Polarization. IEEE Photonics J. 2019, 11, 1–9. [Google Scholar] [CrossRef]
- Narasimhan, S.; Nayar, S. Contrast restoration of weather degraded images. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 713–724. [Google Scholar] [CrossRef]
- Huang, S.; Wang, K.; Liu, H.; Chen, J.; Li, Y. Contrastive Semi-Supervised Learning for Underwater Image Restoration via Reliable Bank. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 18145–18155. [Google Scholar]
- Akkaynak, D.; Treibitz, T. A Revised Underwater Image Formation Model. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6723–6732. [Google Scholar] [CrossRef]
- Song, W.; Wang, Y.; Huang, D.; Tjondronegoro, D. A Rapid Scene Depth Estimation Model Based on Underwater Light Attenuation Prior for Underwater Image Restoration. In Proceedings of the Advances in Multimedia Information Processing—PCM 2018; Lecture Notes in Computer Science; Hong, R., Cheng, W.H., Yamasaki, T., Wang, M., Ngo, C.W., Eds.; Springer: Cham, Switzerland, 2018; pp. 678–688. [Google Scholar] [CrossRef]
- Peng, Y.T.; Cosman, P.C. Underwater Image Restoration Based on Image Blurriness and Light Absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef]
- Drews, P.L.; Nascimento, E.R.; Botelho, S.S.; Montenegro Campos, M.F. Underwater Depth Estimation and Image Restoration Based on Single Images. IEEE Comput. Graph. Appl. 2016, 36, 24–35. [Google Scholar] [CrossRef]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.; Kwong, S.; Tao, D. An Underwater Image Enhancement Benchmark Dataset and Beyond. IEEE Trans. Image Process. 2020, 29, 4376–4389. [Google Scholar] [CrossRef]
- Hitam, M.S.; Awalludin, E.A.; Jawahir Hj Wan Yussof, W.N.; Bachok, Z. Mixture contrast limited adaptive histogram equalization for underwater image enhancement. In Proceedings of the 2013 International Conference on Computer Applications Technology (ICCAT), Sousse, Tunisia, 20–22 January 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Tao, M.W.; Hadap, S.; Malik, J.; Ramamoorthi, R. Depth from Combining Defocus and Correspondence Using Light-Field Cameras. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 673–680. [Google Scholar] [CrossRef]
- Georgiev, T.; Chunev, G.; Lumsdaine, A. Superresolution with the focused plenoptic camera. In Proceedings of the Computational Imaging IX; International Society for Optics and Photonics; Bouman, C.A., Pollak, I., Wolfe, P.J., Eds.; SPIE: Bellingham, WA, USA, 2011; Volume 7873, p. 78730X. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1956–1963. [Google Scholar] [CrossRef]
- Skinner, K.A.; Johnson-Roberson, M. Underwater Image Dehazing With a Light Field Camera. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Ouyang, F.; Yu, J.; Liu, H.; Ma, Z.; Yu, X. Underwater Imaging System Based on Light Field Technology. IEEE Sens. J. 2021, 21, 13753–13760. [Google Scholar] [CrossRef]
- Lu, H.; Li, Y.; Kim, H.; Serikawa, S. Underwater light field depth map restoration using deep convolutional neural fields. Artif. Intell. Robot. 2018, 2018, 305–312. [Google Scholar]
- Ye, T.; Chen, S.; Liu, Y.; Ye, Y.; Chen, E.; Li, Y. Underwater Light Field Retention: Neural Rendering for Underwater Imaging. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, New Orleans, LA, USA, 19–20 June 2022; pp. 488–497. [Google Scholar]
- Akkaynak, D.; Treibitz, T. Sea-Thru: A Method for Removing Water From Underwater Images. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 1682–1691. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1397–1409. [Google Scholar] [CrossRef]
- Ng, R.; Levoy, M.; Brédif, M.; Duval, G.; Horowitz, M.; Hanrahan, P. Light Field Photography with a Hand-held Plenoptic Camera; Stanford University Computer Science Tech Report; Stanford University: Stanford, CA, USA, 2005. [Google Scholar]
- Ahmed, N.; Natarajan, T.; Rao, K. Discrete Cosine Transform. IEEE Trans. Comput. 1974, C-23, 90–93. [Google Scholar] [CrossRef]
- Carlevaris-Bianco, N.; Mohan, A.; Eustice, R.M. Initial results in underwater single image dehazing. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Drews, P., Jr.; do Nascimento, E.; Moraes, F.; Botelho, S.; Campos, M. Transmission Estimation in Underwater Single Images. In Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, Sydney, NSW, Australia, 2–8 December 2013; pp. 825–830. [Google Scholar] [CrossRef]
- Gupta, H.; Mitra, K. Unsupervised Single Image Underwater Depth Estimation. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 624–628. [Google Scholar] [CrossRef]
- Yang, M.; Sowmya, A. An Underwater Color Image Quality Evaluation Metric. IEEE Trans. Image Process. 2015, 24, 6062–6071. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.; Sheikh, H.; Simoncelli, E. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | LF1 | LF2 | LF3 | LF4 | LF5 | Average |
|---|---|---|---|---|---|---|
| UDCP | 20.32 | 20.75 | 21.16 | 19.07 | 20.44 | 20.34 |
| ULAP | 25.09 | 32.43 | 23.89 | 25.11 | 22.03 | 25.31 |
| IBLA | 18.35 | 14.38 | 10.02 | 10.12 | 9.447 | 12.86 |
| Tian’s method | 26.11 | 28.72 | 21.88 | 19.43 | 30.09 | 25.24 |
| Semi-UIR | 16.72 | 25.13 | 24.64 | 21.16 | 19.43 | 21.01 |
| Our method | 27.21 | 27.99 | 30.27 | 28.42 | 37.24 | 30.22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, B.; Gao, X.; Huang, H. Optimizing Underwater Image Restoration and Depth Estimation with Light Field Images. J. Mar. Sci. Eng. 2024, 12, 935. https://doi.org/10.3390/jmse12060935
Xiao B, Gao X, Huang H. Optimizing Underwater Image Restoration and Depth Estimation with Light Field Images. Journal of Marine Science and Engineering. 2024; 12(6):935. https://doi.org/10.3390/jmse12060935
Chicago/Turabian StyleXiao, Bo, Xiujing Gao, and Hongwu Huang. 2024. "Optimizing Underwater Image Restoration and Depth Estimation with Light Field Images" Journal of Marine Science and Engineering 12, no. 6: 935. https://doi.org/10.3390/jmse12060935
APA StyleXiao, B., Gao, X., & Huang, H. (2024). Optimizing Underwater Image Restoration and Depth Estimation with Light Field Images. Journal of Marine Science and Engineering, 12(6), 935. https://doi.org/10.3390/jmse12060935