
Research on Navigation Risk Assessment of Unmanned Ship Under Complex Navigation Conditions


Abstract
1. Introduction
2. Risk Assessment Index System for Unmanned Ships
2.1. Analysis of Navigation Risk Assessment Index of Unmanned Ships
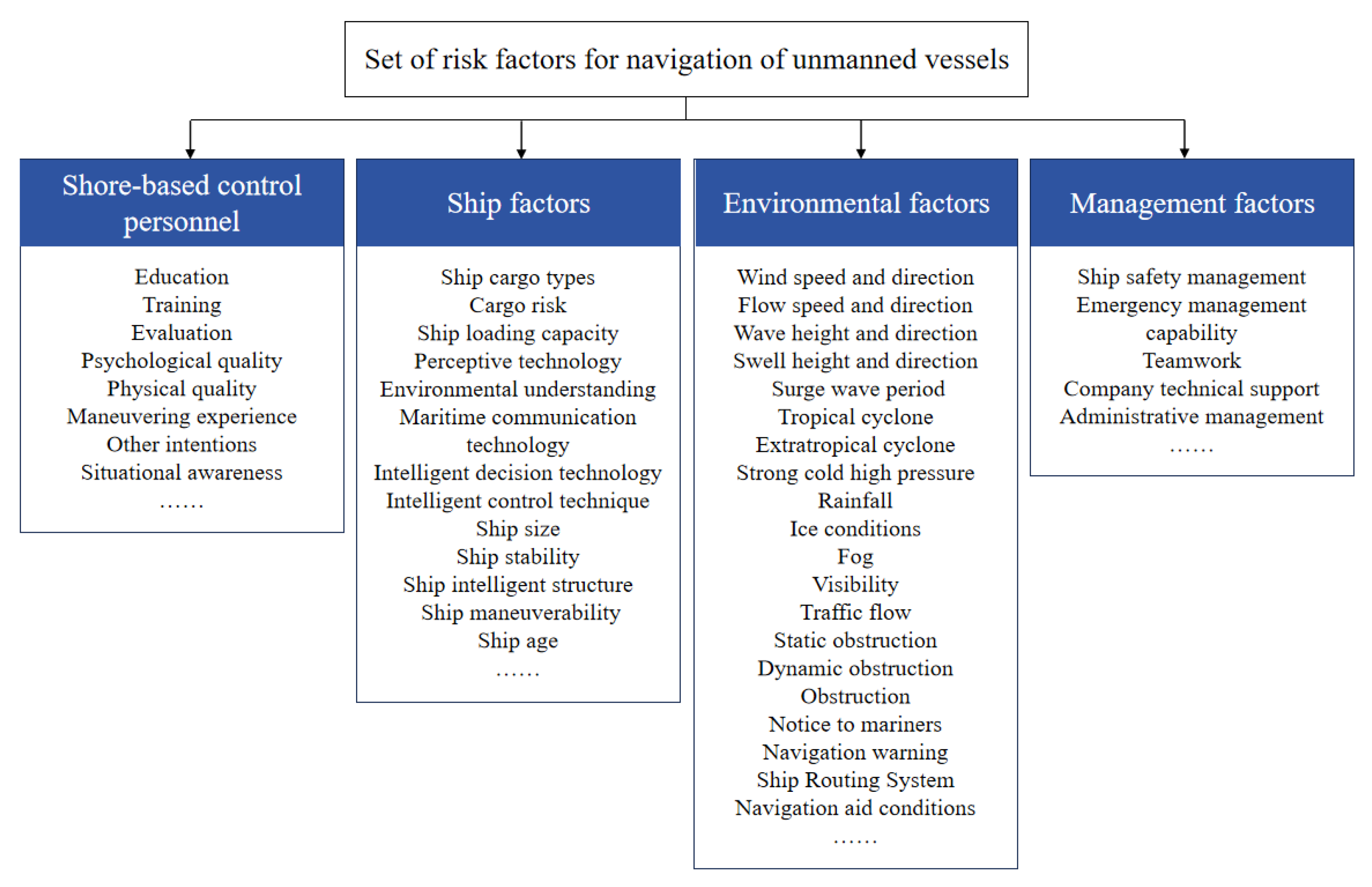
2.1.1. Factors Affecting Navigation Safety of Unmanned Ships
2.1.2. Index Screening of Navigation Risk of Unmanned Ships
2.2. Assessment Index Weight Calculation
- Divide complex indexing system into multiple hierarchical levels.
- Based on expert judgment, express the relative importance of factors at higher levels according to the arrangement of factors at each level. This step is conducted by constructing the discriminant matrix.
- Then, determine the order weights of each factor’s relative importance within each level based on the maximum eigenvalue and its eigenvector derived from this matrix.
- Finally, by analyzing each level, obtain the overall ranking weight for the entire system.
3. Navigation Risk Assessment of Unmanned Ships Based on Fuzzy Comprehensive Evaluation
3.1. Risk Assessment of Unmanned Ships Under Complex Navigation Conditions
3.1.1. Establishment of Navigation Risk Factor Set for Unmanned Ships Under Complex Navigation Conditions
3.1.2. Establishment of Navigation Risk Assessment Set for Unmanned Ships Under Complex Navigation Conditions
3.1.3. Construction of a Fuzzy Subset Table for Membership Degree of Indexes at Each Level
Membership Degree of Shore-Based Control Personnel
- (1)
- Membership degree of professional skillsAccording to the International Convention on Standards of Training, Certification and Watchkeeping for Seafarers, International Convention on Standards of Training, Certification and Watchkeeping for Seafarers, STCW, and the description of the Autonomous Cargo Transport Ships Guide and the unmanned ships industry guidelines issued by the United Kingdom, professional skills are classified into three categories: skilled, medium, and poor.
- (2)
- Membership degree of education and trainingThe skill requirements of the shore-based control personnel of unmanned ships must be higher than that of the senior pilots of manned ships. According to the existing assessment mechanism of crew training, education and training levels are classified as adequate, average, and insufficient.
- (3)
- Membership degree of situational awarenessSituational awareness refers to the ability of the crew or the shore-based control personnel to understand and judge the navigation environment where the unmanned ship is trapped and the ability to effectively warn of the navigation risk in the future navigation state. The situational awareness is specifically divided into strong, moderate, and weak.
Membership Degree of Ship Factors
- (1)
- Membership degree of ship itselfFor the safe navigation of unmanned ships under complex conditions, the ship’s own influence on safe navigation is mainly reflected in four aspects: ship size, maneuverability, ship age, and ship loading.
- Membership degree of ship sizeSince there is no international specification and document for the size limit of unmanned ships, this study temporarily divides the size of ships into large, medium, and small.
- Membership degree of maneuverabilityShip maneuverability is mainly reflected in the ship following and controlling effect after trajectory planning. Therefore, the maneuverability of unmanned ships is divided into three categories: good, medium, and poor.
- Membership degree of ship ageIn this study, according to the requirements of ship machinery repair and ship inspection and other relevant documents, the ship age membership is divided into more than 15 years, 6 years to 15 years, and less than 6 years.
- Membership degree of ship loadingAt present, the unmanned ships for the autonomous navigation test in some typical sea areas in the world are all container ships, so this study divides the ship loading situation into full load, half load, and no load according to manned container ships.
- (2)
- Membership degree of perception and understanding abilityThe perception and understanding ability of unmanned ships can be divided into four types: target recognition ability, navigation environment understanding, situation judgment, and semantic understanding.
- Membership degree of target recognition abilityAccording to the proportion of target recognition, this study divides the target recognition ability into full recognition, majority recognition, and partial recognition.
- Membership degree of navigation environment understandingNavigation environment understanding mainly refers to the estimation of navigation situation on the basis of perception, and the judgment of the status of the unmanned ship, including the number of obstacles, the position, size, relative orientation, relative speed, and other information. Therefore, this study divides the membership degree of navigation environment understanding index into good, medium, and poor.
- Membership degree of situation judgmentThe situation judgment mainly refers to the judgement of the encounter state between the unmanned ship and the target ship of an obstacle based on the understanding of the environment, such as the head-on situation, overtaking situation, and cross-encounter situation. In this study, the membership degree of situation judgment is divided into accurate, medium, and unclear.
- Membership degree of semantic understandingSemantic understanding is to convert the information of navigational environment understanding into binary attribute relationships among entities, such as unmanned ships, obstacles, charts, and environmental information (e.g., the location attribute and relationship attribute). Therefore, this study divides semantic understanding into three categories: strong, general, and weak.
- (3)
- Maritime communication technologyMaritime communication technology is one of the key technologies in unmanned ship technology, which affects the quality and efficiency of shore-based support services and the communication between two ships or between a ship and the shore. It is usually manifested in the aspects of communication bandwidth, communication type, and communication reliability, which can influence the transmission effect of the information between the shore and the ship.
- Membership degree of communication bandwidthThe principle of communication and traffic is similar; each piece of information needs to be effectively transmitted on the communication channel. The narrower the bandwidth, the more likely it is for errors such as information serialization and cross-talk to occur between messages. Therefore, this study divides the membership degree of the influence of communication bandwidth on the safe navigation of unmanned ships into broadband and narrowband.
- Membership degree of communication typeThe more types of communication, the easier it is to traverse a variety of scenarios or ship communication under a variety of complex navigation conditions. Therefore, the types of communication are divided into more and less.
- Membership degree of communication reliabilityIn addition to the impact of communication bandwidth and communication types, the reliability of communication is also crucial to the safe navigation of unmanned ships. In this study, the membership degree of communication reliability is divided into strong, medium, and weak.
Membership Degree of Environmental Factors
- (1)
- Membership degree of hydrometeorologyFor the safe navigation of unmanned ships under complex conditions, the impact of complex weather conditions on unmanned ships is especially prominent, which is reflected in four aspects: wind level, rainfall, surge wave, and visibility.
- Membership degree of wind levelAccording to the concept and classification of meteorology, this study mainly divides the subordination degree of wind class into 0–4, 5–8, and 9 and considers the influence of wind class on the navigation safety of unmanned ships.
- Membership degree of rainfallRainfall of significant size can cause poor visibility, free liquid surface influence, and other dynamic hazard sources. Therefore, the membership degree of rainfall is defined as maximum, medium, and small.
- Membership degree of surge waveThe surge and wind level have similar principles to affect the safe navigation of unmanned ships. Therefore, the membership degree of a wave surge is divided into level 0–3, level 4–5, and above level 6.
- Membership degree of visibilityAccording to the perception ability of the onboard instruments and equipment of unmanned ships, the visibility membership is divided into good and above, medium, and poor.
- (2)
- Membership degree of navigation environmentThe navigation environment of unmanned ships is mainly divided into three types: traffic flow, navigation obstruction, and navigation aids.
- Membership degree of traffic flowThe density of traffic flow has a significant impact on the safe navigation of unmanned ships. In this study, the membership degree of traffic flow is divided into high density, medium density, and low density.
- Membership degree of navigation obstructionThe safety of unmanned ships in complex navigation conditions depends in part on the presence of navigational obstacles during the voyage. Therefore, this study divides the membership degree of obstructions into existence and non-existence.
- Membership degree of navigation aidsCompared with manned ships, unmanned ships are more dependent on time-effective navigation service information set services, which are based on the ship’s own needs. Therefore, this study divides the membership degree of navigation aid service into two levels: sufficient and lacking.
3.1.4. Establishment of Weight
3.1.5. Fuzzy Comprehensive Judgement
- Given a set of evaluations.
- Given a set of factors.
- Each factor in the factor set corresponds to a weight coefficient, and all weight coefficients constitute a weight vector.
- Evaluate each factor in the factor set based on the evaluation set to obtain a single-factor evaluation vector.
- By evaluating all factors, an evaluation matrix can be obtained.
- The final fuzzy evaluation result is obtained by multiplying the weight vector with the evaluation matrix. The multiplying can be conducted by using different operators.
- The final evaluation vector can be obtained through the maximum membership degree method, centroid method, or weighted average method. The maximum membership degree method is used in this article.
- (1)
- Fuzzy comprehensive evaluation of the third-level indexesAccording to the actual sailing situation of unmanned ships under complex sailing conditions, the third-level evaluation matrix can be obtained by using the weight for ship factors and environmental factors obtained from the single-factor evaluation calculated by the discriminant matrix in Section 2, as shown in Table 4. By multiplying the weight and the evaluation matrix, the comprehensive evaluation index set of ship itself, perception and understanding, maritime communication technology, hydrometeorology, and navigation environment can be obtained, respectively.
- (2)
- Fuzzy comprehensive evaluation of the second-level indexesAccording to the actual sailing conditions of unmanned ships under complex sailing conditions, the evaluation matrix of the second level can be obtained by using the weights obtained from the single-factor evaluation calculated by the discriminant matrix in Section 2 and by using the fuzzy comprehensive evaluation results of the third level, as shown in Table 5. By multiplying the weight and the evaluation matrix, the comprehensive evaluation index set of shore-based control personnel, ship factors, and environmental factors can be obtained, respectively.
- (3)
- Fuzzy comprehensive evaluation of the first-level indexesAccording to the actual sailing conditions of unmanned ships under complex sailing conditions, the evaluation matrix of the first level can be obtained by using the weights obtained from the single-factor evaluation calculated by the discriminant matrix in Section 2 and by using the fuzzy comprehensive evaluation results of the second level, as shown in Table 6. By multiplying the weight with the evaluation matrix of this level, the comprehensive evaluation index set of navigation risk assessment of unmanned ships under complex navigation conditions can be obtained. The evaluation index set is normalized, and the comprehensive evaluation result can be obtained according to the principle of the maximum membership degree.

{kind=link}
| Indicators of Evaluation | Judgment Matrix | ||||
|---|---|---|---|---|---|
| Relatively Safe | Criticality | Low Risk | Medium Risk | High Risk | |
| Ship size Ship maneuverability Ship age Ship loading | |||||
| Target recognition ability Navigation environment understanding Situation judgment Semantic understanding | |||||
| Communication bandwidth Communication type Communication reliability | |||||
| Wind level Rainfall Surge wave Visibility | |||||
| Traffic flow Obstruction Navigation AIDS | |||||
| Indicators of Evaluation | Judgment Matrix | ||||
|---|---|---|---|---|---|
| Relatively Safe | Criticality | Low Risk | Medium Risk | High Risk | |
| Professional skills Education and training Situational awareness | |||||
| Ship itself Perception and understanding Maritime communication technology | |||||
| Hydrometeorology Navigation environment | |||||
| Indicators of Evaluation | Judgment Matrix | ||||
|---|---|---|---|---|---|
| Relatively Safe | Criticality | Low Risk | Medium Risk | High Risk | |
| Shore-based control personnel Ship factors Environmental factors | |||||
3.2. Navigation Risk Assessment and Verification of Unmanned Ships Under Complex Navigation Conditions
4. Conclusions and Prospect
4.1. Conclusions
- (1)
- We reviewed the development status of unmanned ships worldwide, as well as the research status of risk assessment at home and abroad, to lay the foundation for establishing a risk assessment of unmanned ships under complex navigation conditions.
- (2)
- The risk assessment indexes of unmanned ships are analyzed and screened theoretically, the establishment process of the risk assessment index system of unmanned ships is expounded, and the risk factor indexes affecting the navigation safety of unmanned ships under complex navigation conditions are determined by using the analytic hierarchy process; a consistency test is also carried out.
- (3)
- The fuzzy comprehensive evaluation method is used to determine the membership degree of risk factors of unmanned ships under complex navigation conditions, and the algorithm in this study is verified through cases, where the navigation risk assessment results of unmanned ships under complex navigation conditions constructed in this study are consistent with the expert identification results, proving the effectiveness and applicability of the proposed risk assessment method.
- (4)
- The research also has some limitations. One of the limitations lies in the lack of empirical data for autonomous ships, resulting in a little arbitrary assignment of membership degrees to certain factors, such as shore-based control personnel. Another limitation is that, due to the lack of international standards for the size and maneuverability of unmanned vessels, this study temporarily classifies them based on conventional manned vessels. In addition, the fuzzy comprehensive evaluation method used in this study has subjectivity on member degrees to some extent. This is due to the nature of fuzzy comprehensive evaluation itself.
4.2. Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- China Classification Society. Rules for Intelligent Ships; China Classification Society: Beijing, China, 2015. [Google Scholar]
- State Council of the People’s Republic of China. Development Planning for a New Generation of Artificial Intelligence; State Council of the People’s Republic of China: Beijing, China, 2017.
- Gao, R. The Study on Formal Safey Accessment (FSA) of Containerships. Master’s Thesis, Dalian Maritime University, Dalian, China, 2013. [Google Scholar]
- Wang, M. Safe Assessment of Containerships Based on ReliefF-ANFIS. Master’s Thesis, Dalian Maritime University, Dalian, China, 2016. [Google Scholar]
- Hu, S.; Fang, Q.; Xia, H.; Xi, Y. Formal safety assessment based on relative risks model in ship navigation. Reliab. Eng. Sys. Saf. 2007, 92, 369–377. [Google Scholar] [CrossRef]
- Zhu, J. Study on Risk Security Evaluation Method of Ship Navigation. Master’s Thesis, Jimei University, Xiamen, China, 2016. [Google Scholar]
- Zhang, H. The Ship Capsizing Risk Assessment based on BP Neural Network. Master’s Thesis, Dalian Maritime University, Dalian, China, 2018. [Google Scholar]
- Chai, T. Research on Risk Assessment of Ship Collision and Oil Spill Pollution Based on Stochastic Methodology: The Case Study of Taiwan Strait. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2018. [Google Scholar]
- Jiang, D. The Study on Early-Warning Level of Navigation Safety Risk Under Complex Weather in the Three Gorges Reservoir Area. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2013. [Google Scholar]
- Qu, X.B.; Meng, Q.; Li, S.Y. Ship collision risk assessment for the Singapore Strait. Accid. Anal. Prev. 2011, 43, 2030–2036. [Google Scholar] [CrossRef] [PubMed]
- Zaman, M.B.; Kobayashi, E.; Wakabayashi, N.; Khanfir, S.; Pitana, T.; Maimun, A. Fuzzy FMEA model for risk evaluation of ship collisions in the Malacca Strait: Based on AIS data. J. Simul. 2014, 8, 91–104. [Google Scholar] [CrossRef]
- Luan, F. Identification, Assessment and Control of Navigational Risks in Coastal and Congested Waters. Navig. China 2014, 37, 80–84. [Google Scholar]
- Goerlandt, F.; Montewka, J.; Kuzmin, V.; Kujala, P. A risk-informed ship collision alert system: Framework and application. Saf. Sci. 2015, 77, 182–204. [Google Scholar] [CrossRef]
- Perera, L.P.; Soares, C.G. Collision risk detection and quantification in ship navigation with integrated bridge systems. Ocean Eng. 2015, 109, 344–354. [Google Scholar] [CrossRef]
- Zhen, R.; Shi, Z.; Shao, Z.; Liu, J. A novel regional collision risk assessment method considering aggregation density under multi-ship encounter situations. J. Navig. 2021, 75, 76–94. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H. Collision Avoidance Decision Method for Unmanned Surface Vehicle Based on an Improved Velocity Obstacle Algorithm. J. Mar. Sci. Eng. 2022, 10, 1047. [Google Scholar] [CrossRef]
- Huang, C.; Wang, X.; Wang, H.; Kong, J.; Zhou, J. A novel regional ship collision risk assessment framework for multi-ship encounters in complex waters. Ocean Eng. 2024, 309, 118583. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B.; Haugen, S. Assessing ship risk model applicability to Marine Autonomous Surface Ships. Ocean Eng. 2018, 165, 140–154. [Google Scholar] [CrossRef]
- Karvonen, H.; Martio, J. Human Factors Issues in Maritime Autonomous Surface Ship Systems Development. In Proceedings of the 1st International Conference on Maritime Autonomous Surface Ships, ICMASS 2018, Busan, Republic of Korea, 8–9 November 2018; SINTEF Academic Press: Trondheim, Norway, 2019. [Google Scholar]
- Sotiralis, P.; Ventikos, N.P.; Hamann, R.; Golyshev, P.; Teixeira, A.P. Incorporation of human factors into ship collision risk models focusing on human centred design aspects. Reliab. Eng. Sys. Saf. 2016, 156, 210–227. [Google Scholar] [CrossRef]
- Liu, W. Research on Evaluation Method of Static Comfort of Automobile Seat Based on Fuzzy Neural Network. Master’s Thesis, Ningbo University, Ningbo, China, 2017. [Google Scholar]
- MUNIN. Research in Maritime Autonomous Systems Project Results and Technology Potentials. 2015. Available online: https://cordis.europa.eu/project/id/314286/reporting (accessed on 30 September 2024).
- Niu, D.; Xu, C. Study on Thermal Power Plant Impact Post-Evaluation Based on AHP and Multi-Level Fuzzy Comprehensive Evaluation. East China Electr. Power 2010, 38, 1413–1416. [Google Scholar]
- Dong, J. Research on Computation Methods of AHP Weight Vector and Its Applications. Sci. Technol. Inf. 2015, 13, 218. (In Chinese) [Google Scholar]
- Liang, Y. The Industrialization Risk Assessment Phosphate Building Gypsum Materials for Wall Based on Fuzzy Neural Network. Master’s Thesis, Kunming University of Science and Technology, Kunming, China, 2018. [Google Scholar]
- Zhao, G.; Liu, H. Practical risk assessment based on multiple fuzzy comprehensive evaluations and entropy weighting. J. Tsinghua Univ. (Sci. Technol.) 2012, 52, 1382–1387. (In Chinese) [Google Scholar]
| First-Level Indexes | Shore-Based Control Personnel A1 | Ship Factors A2 | Environmental Factors A3 |
|---|---|---|---|
| Shore-based control personnel | 1 | 6/8 | 8/4 |
| Ship factors | 8/6 | 1 | 6/4 |
| Environmental factors | 4/8 | 4/6 | 1 |
| Destination Layer | First-Level Indicators Ai | Weight | Second-Level Indicators Aij | Weight | Third-Level Indicators Aijk | Weight |
|---|---|---|---|---|---|---|
| Navigation risk assessment index system of unmanned ships | Shore-based control personnel A1 | 0.3695 | Professional skills A11 | 0.2808 | ||
| Education and training A12 | 0.1350 | |||||
| Situational awareness A13 | 0.5842 | |||||
| Ship factors A2 | 0.4067 | Ship itself A21 | 0.1952 | Ship size A211 | 0.3178 | |
| Ship maneuverability A212 | 0.2200 | |||||
| Ship age A213 | 0.1837 | |||||
| Ship loading condition A214 | 0.2785 | |||||
| Perception and understanding A22 | 0.4592 | Target recognition ability A221 | 0.3289 | |||
| Navigation environment understanding A222 | 0.1813 | |||||
| Situation judgment A223 | 0.3086 | |||||
| Semantic understanding A224 | 0.1813 | |||||
| Maritime communication technology A23 | 0.3457 | Communication bandwidth A231 | 0.1571 | |||
| Communication type A232 | 0.2493 | |||||
| Communication reliability A233 | 0.5936 | |||||
| Environmental factors A3 | 0.2238 | Hydrometeorology A31 | 0.5000 | Wind level A311 | 0.3038 | |
| Rainfall A312 | 0.1201 | |||||
| Surge wave A313 | 0.2190 | |||||
| Visibility A314 | 0.3571 | |||||
| Navigation environment A32 | 0.5000 | Traffic flow A321 | 0.1667 | |||
| Obstruction A322 | 0.3333 | |||||
| Navigation aid conditions A323 | 0.5000 |
| The first-level indicators | |
| The second-level indicators | |
| The third-level indicators | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Liu, Z.; Ma, X. Research on Navigation Risk Assessment of Unmanned Ship Under Complex Navigation Conditions. J. Mar. Sci. Eng. 2024, 12, 1947. https://doi.org/10.3390/jmse12111947
Zhang W, Liu Z, Ma X. Research on Navigation Risk Assessment of Unmanned Ship Under Complex Navigation Conditions. Journal of Marine Science and Engineering. 2024; 12(11):1947. https://doi.org/10.3390/jmse12111947
Chicago/Turabian StyleZhang, Wenjun, Zihao Liu, and Xiaoxue Ma. 2024. "Research on Navigation Risk Assessment of Unmanned Ship Under Complex Navigation Conditions" Journal of Marine Science and Engineering 12, no. 11: 1947. https://doi.org/10.3390/jmse12111947
APA StyleZhang, W., Liu, Z., & Ma, X. (2024). Research on Navigation Risk Assessment of Unmanned Ship Under Complex Navigation Conditions. Journal of Marine Science and Engineering, 12(11), 1947. https://doi.org/10.3390/jmse12111947