
Dynamic Response of Multiconnected Floating Solar Panel Systems with Vertical Cylinders



Abstract
:1. Introduction
2. Theoretical Background
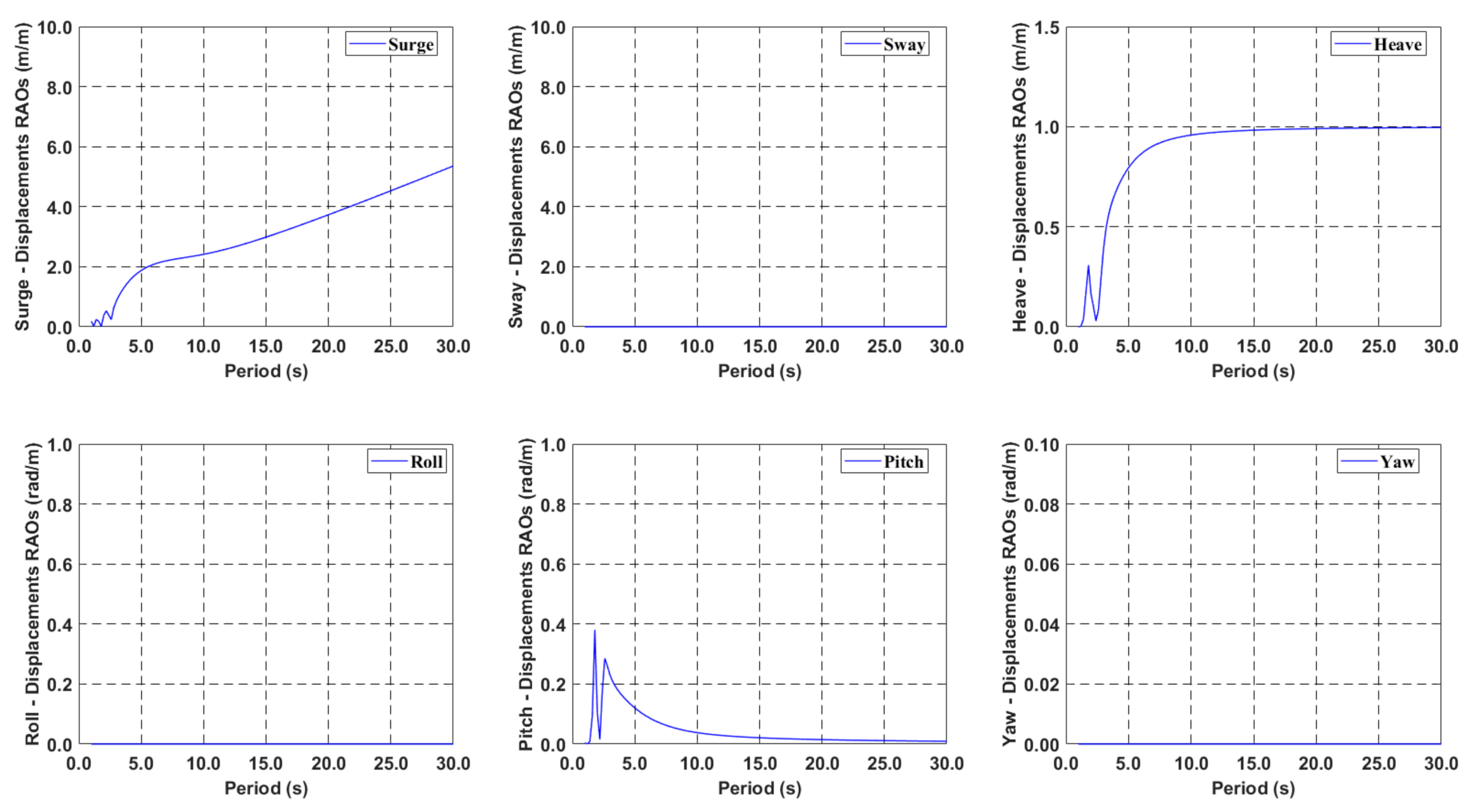
2.1. Hydrodynamic Coefficients (Frequency-Domain Analysis)
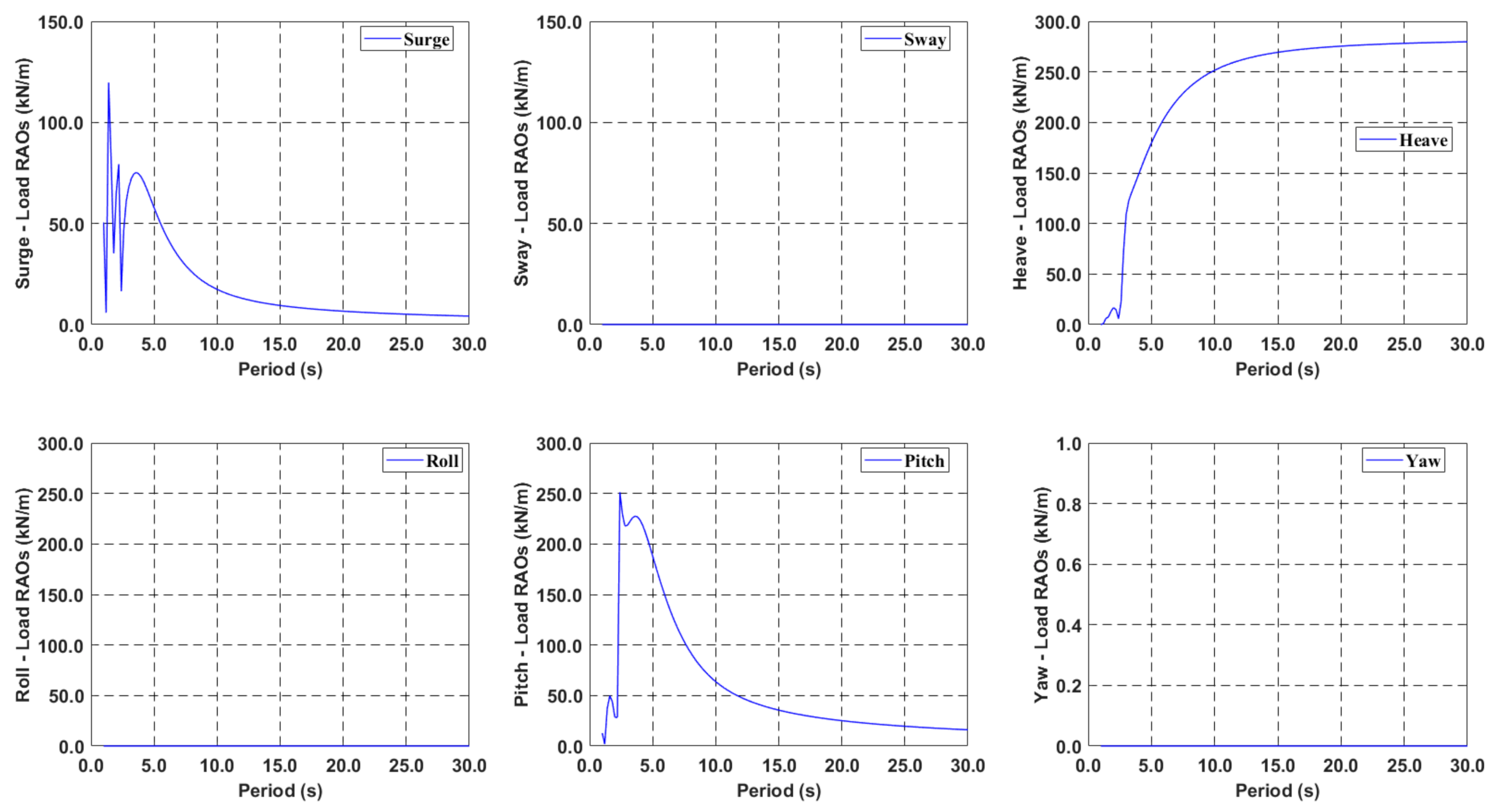
2.2. Wave Excitation Force
2.3. Dynamics of Floating Systems (Time-Domain Analysis)
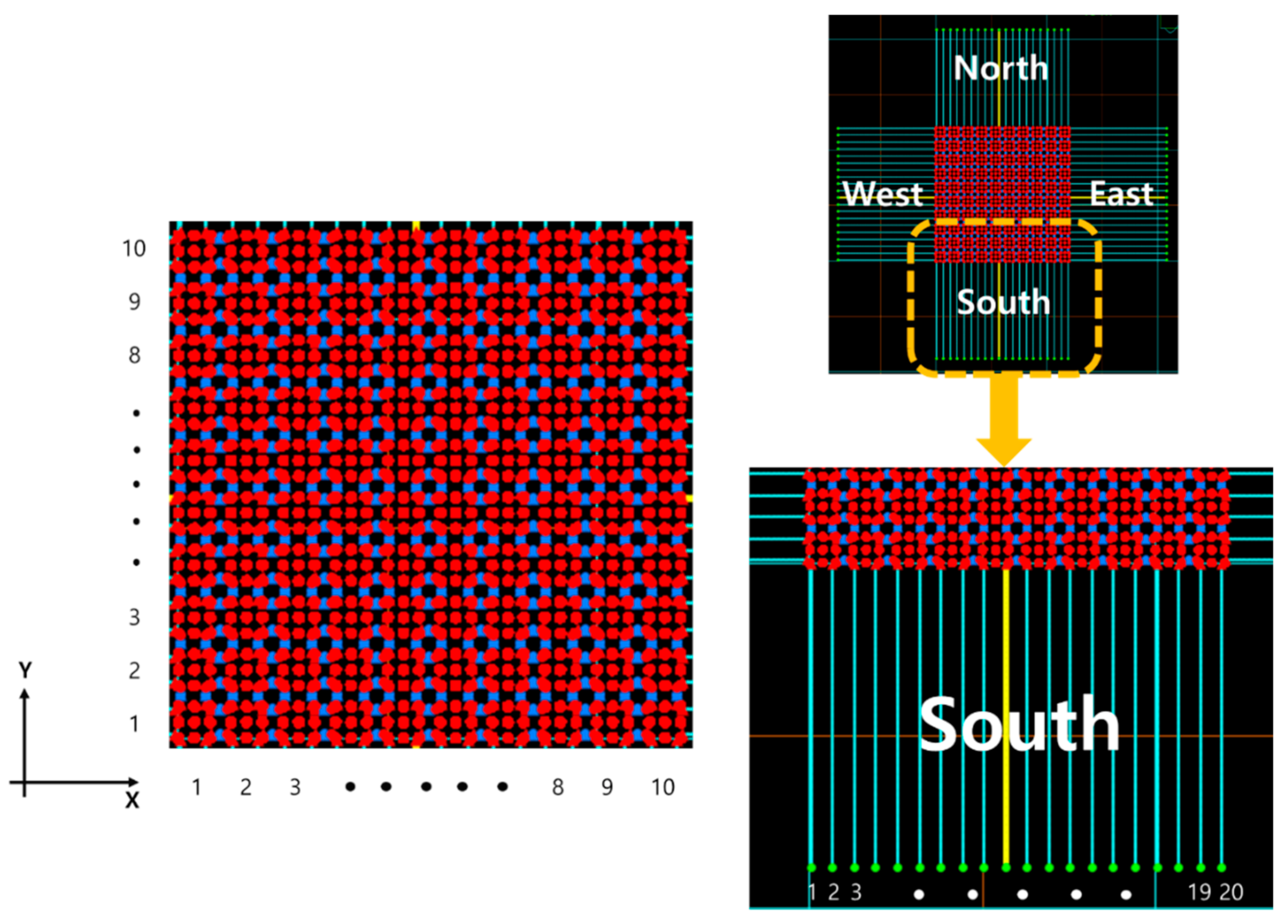
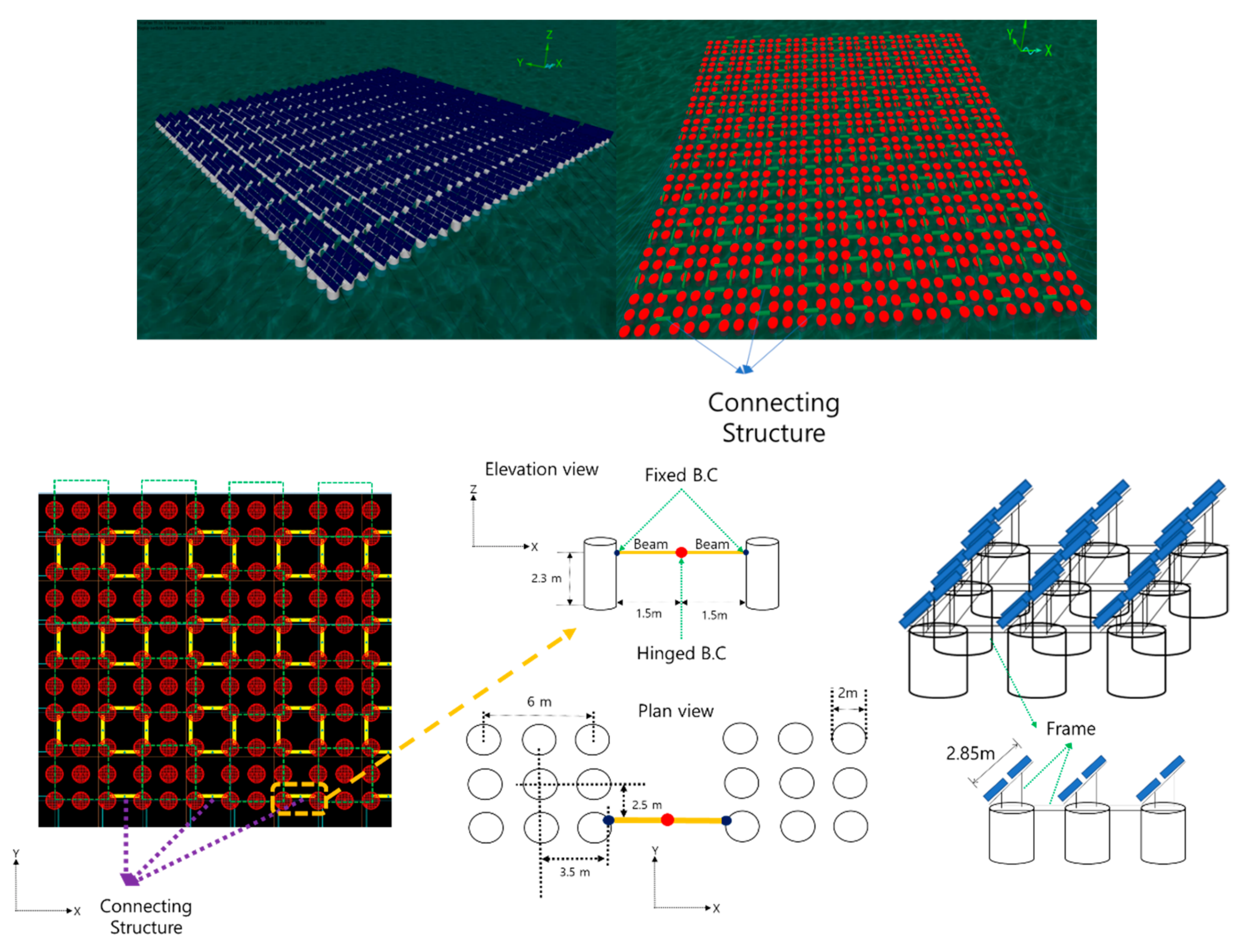
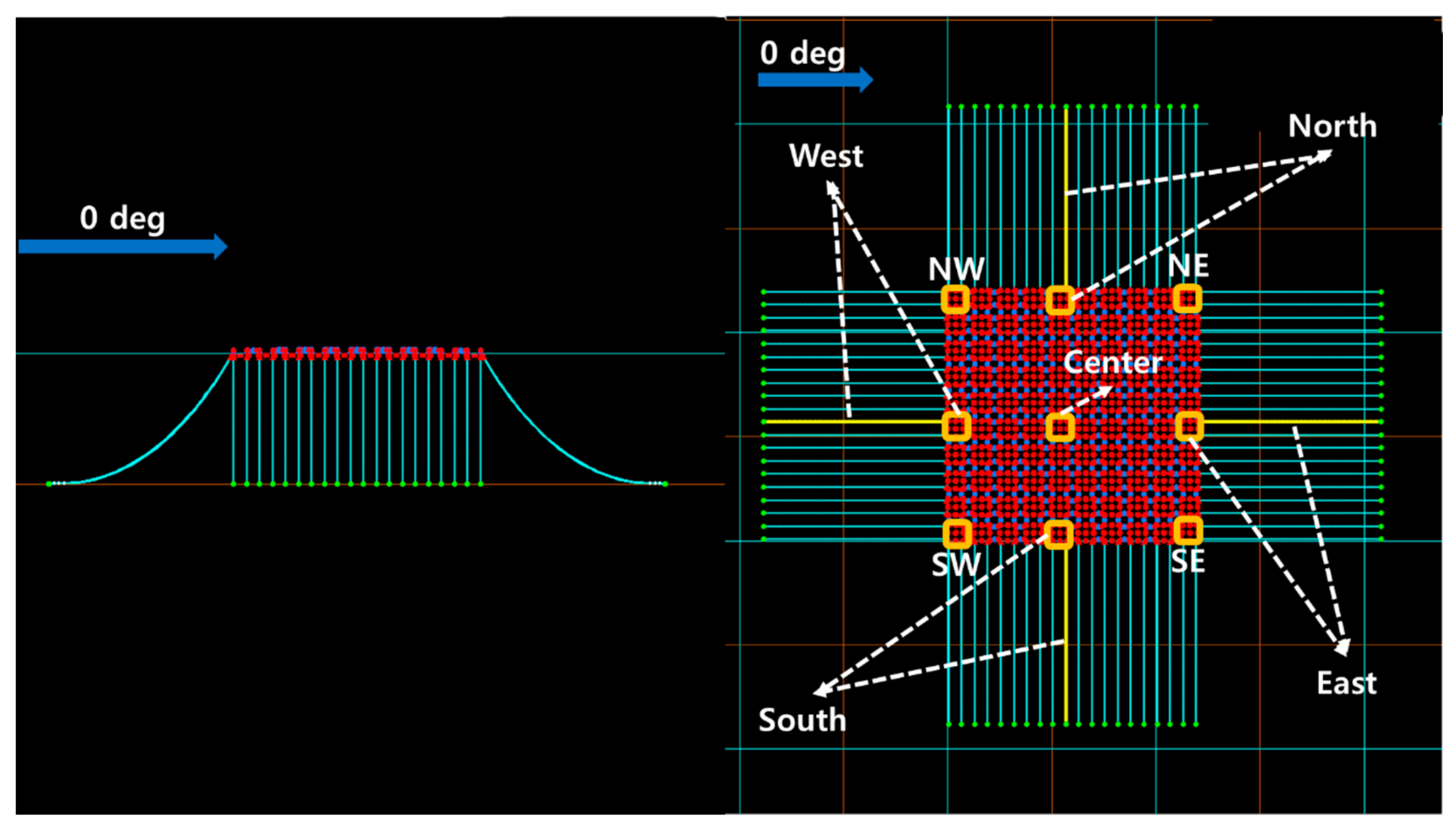
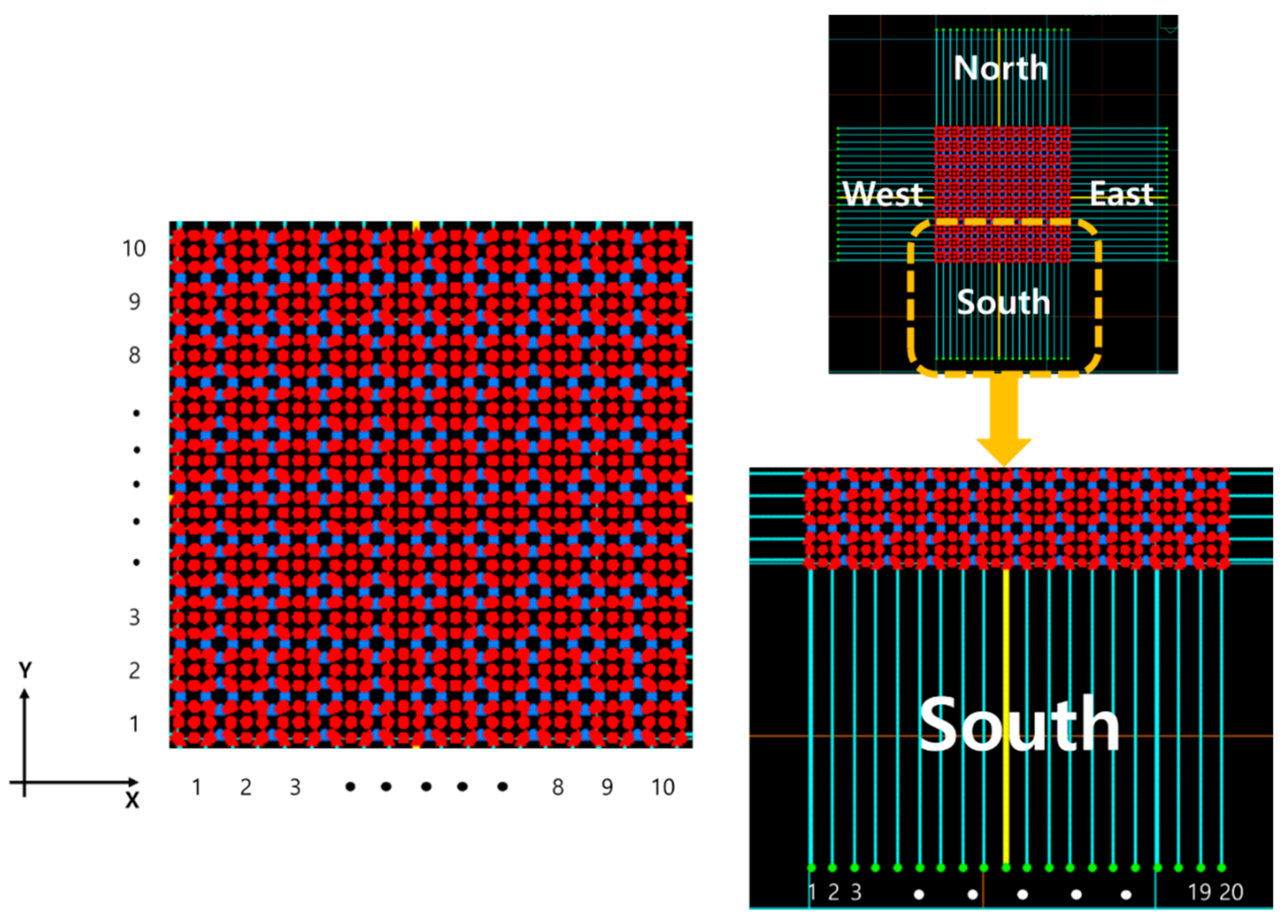
3. Target Model
4. Results and Discussion
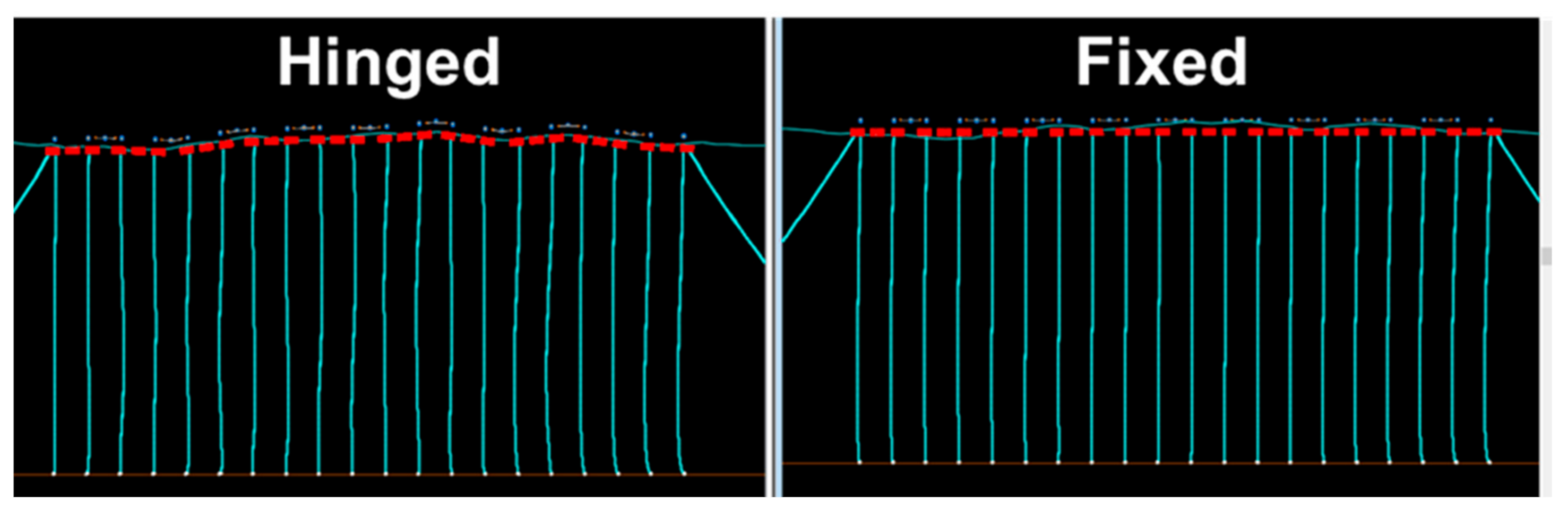
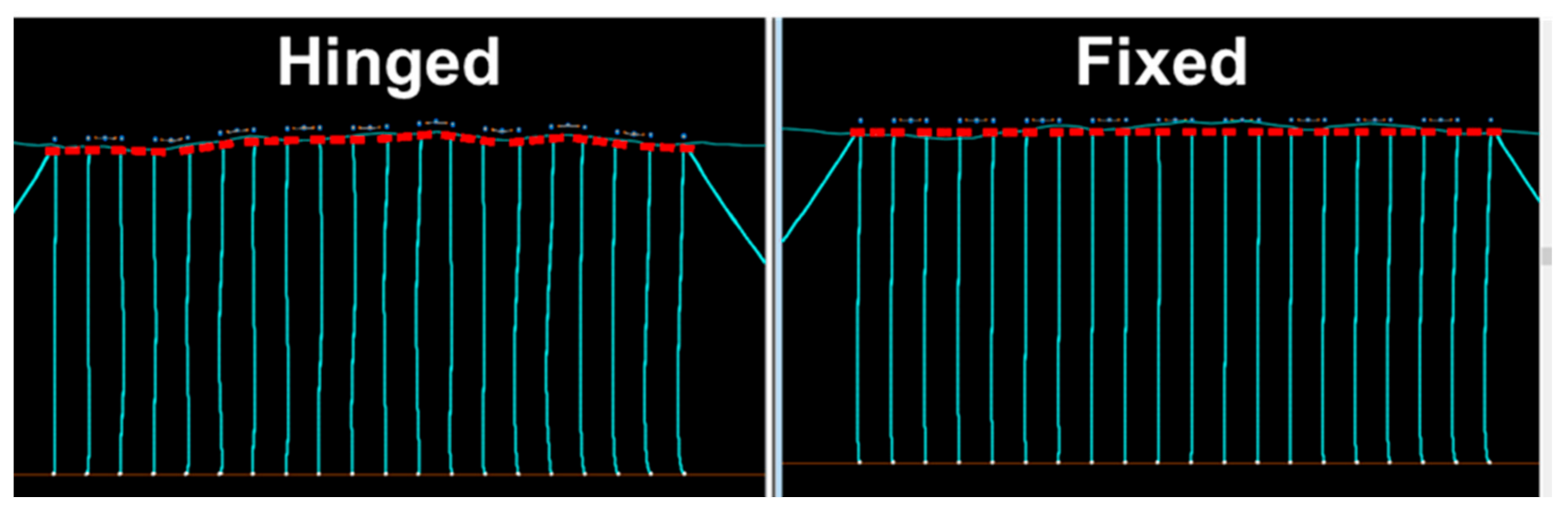
4.1. Connecter Boundary Condition (B.C) Effect (Hinged vs. Fixed)
4.2. Extreme Condition
4.3. Multiple Broken MLs
5. Conclusions
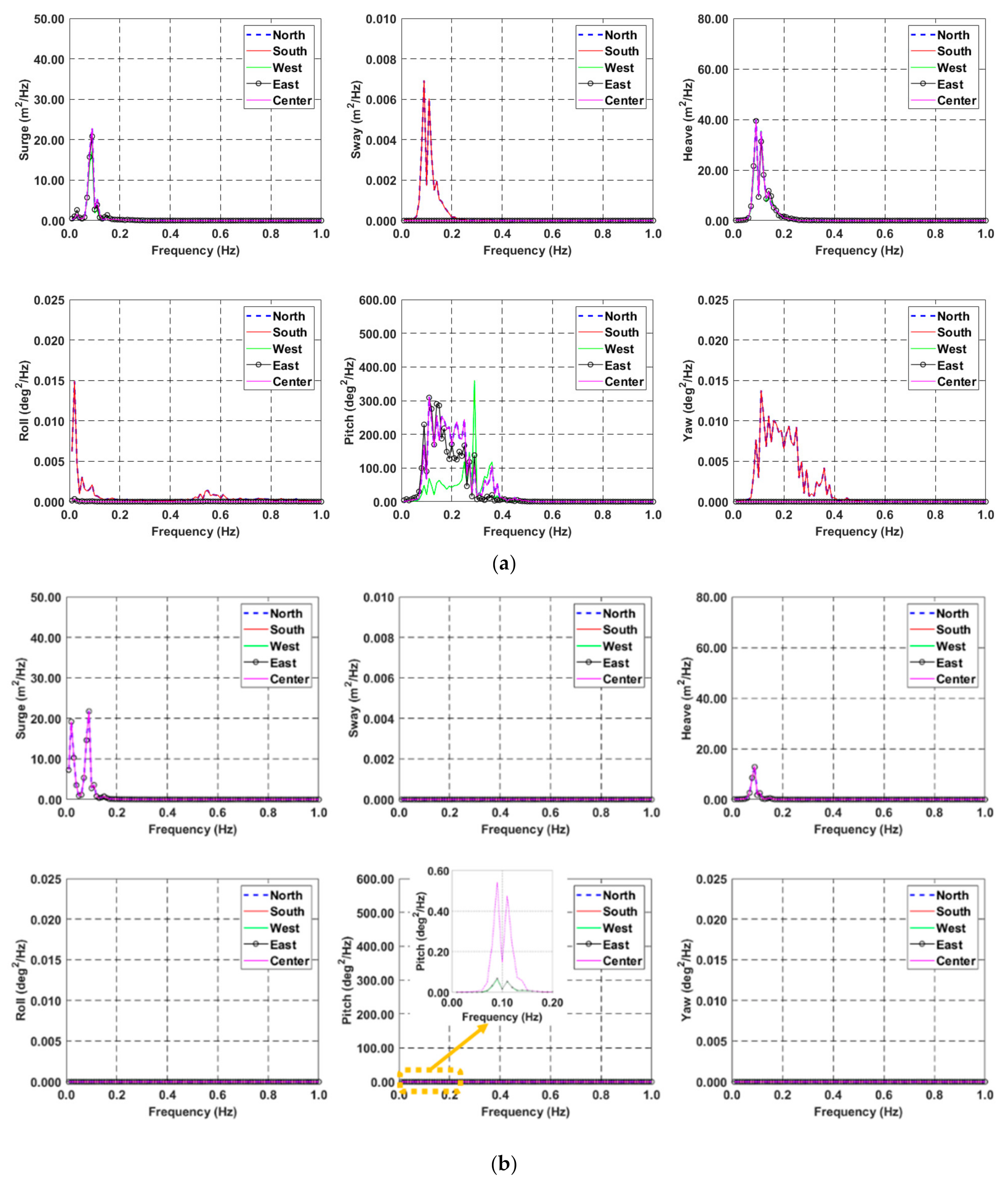
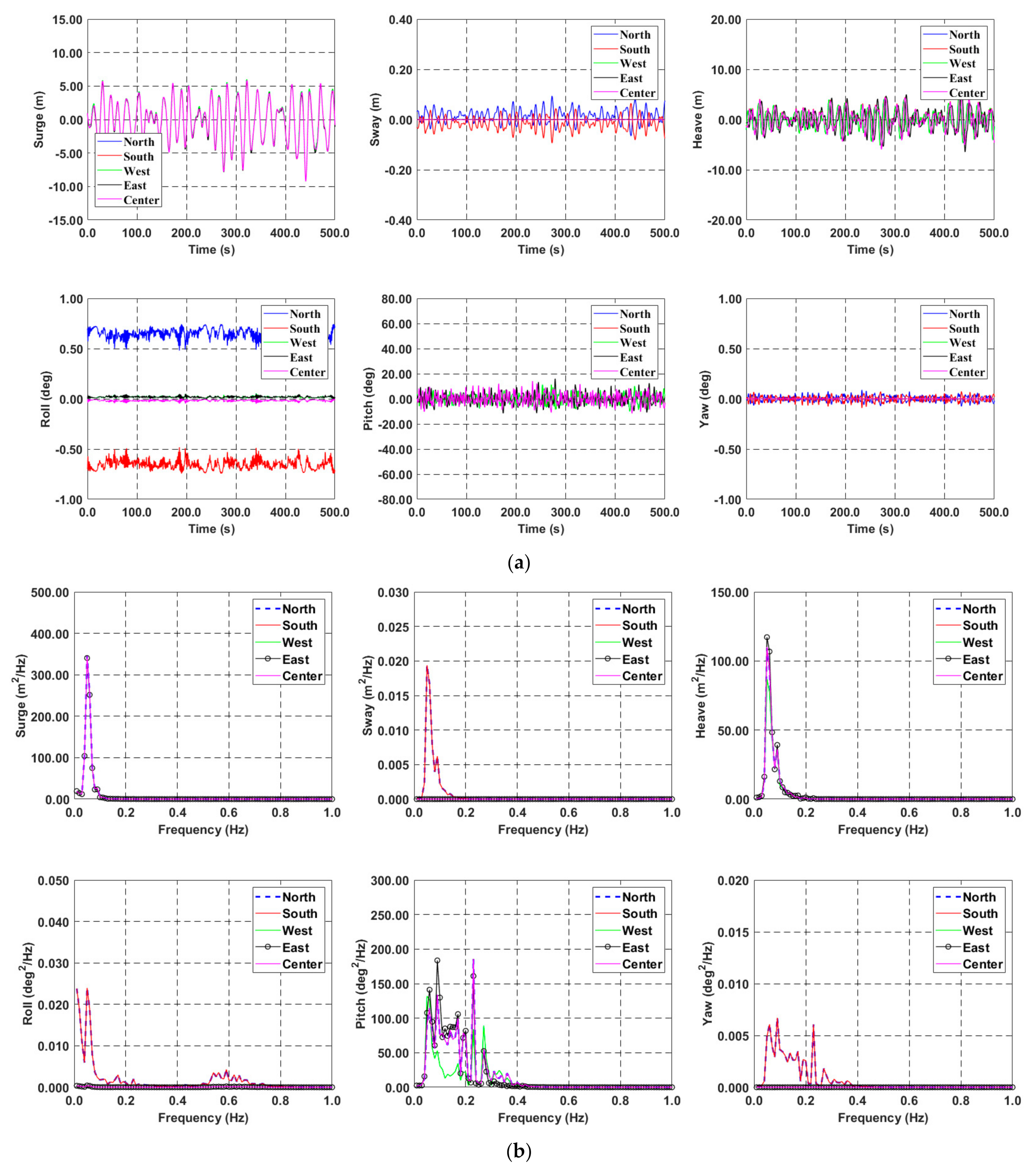
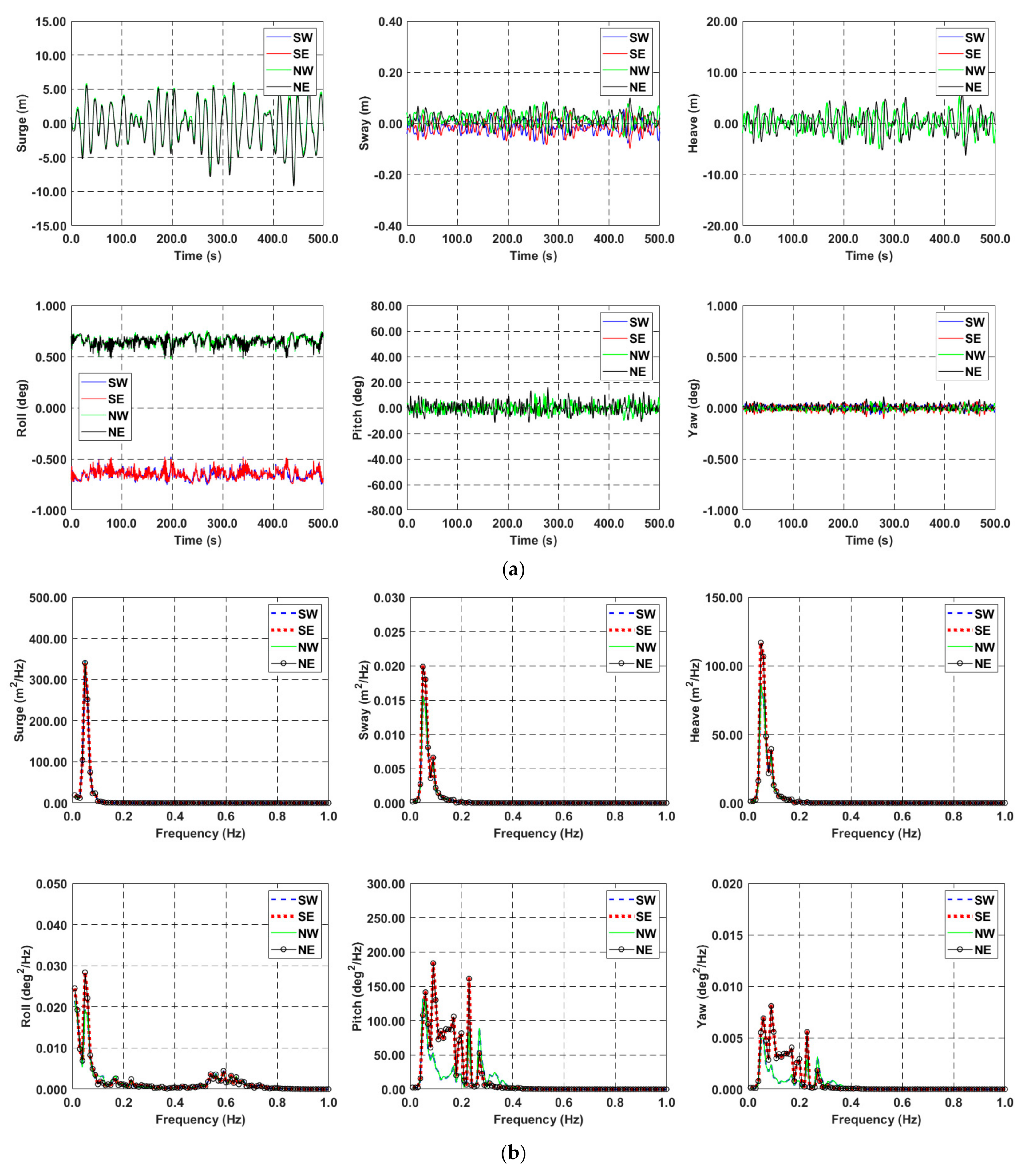
- In normal operation, due to the additional moment generated by the connector, based on the vertical or rotational movement of the system, unexpected dynamic response along the sway, roll, and yaw directions occurred under the hinged connector B.C, whereas it disappeared in the fixed connector B.C case under 0° heading.
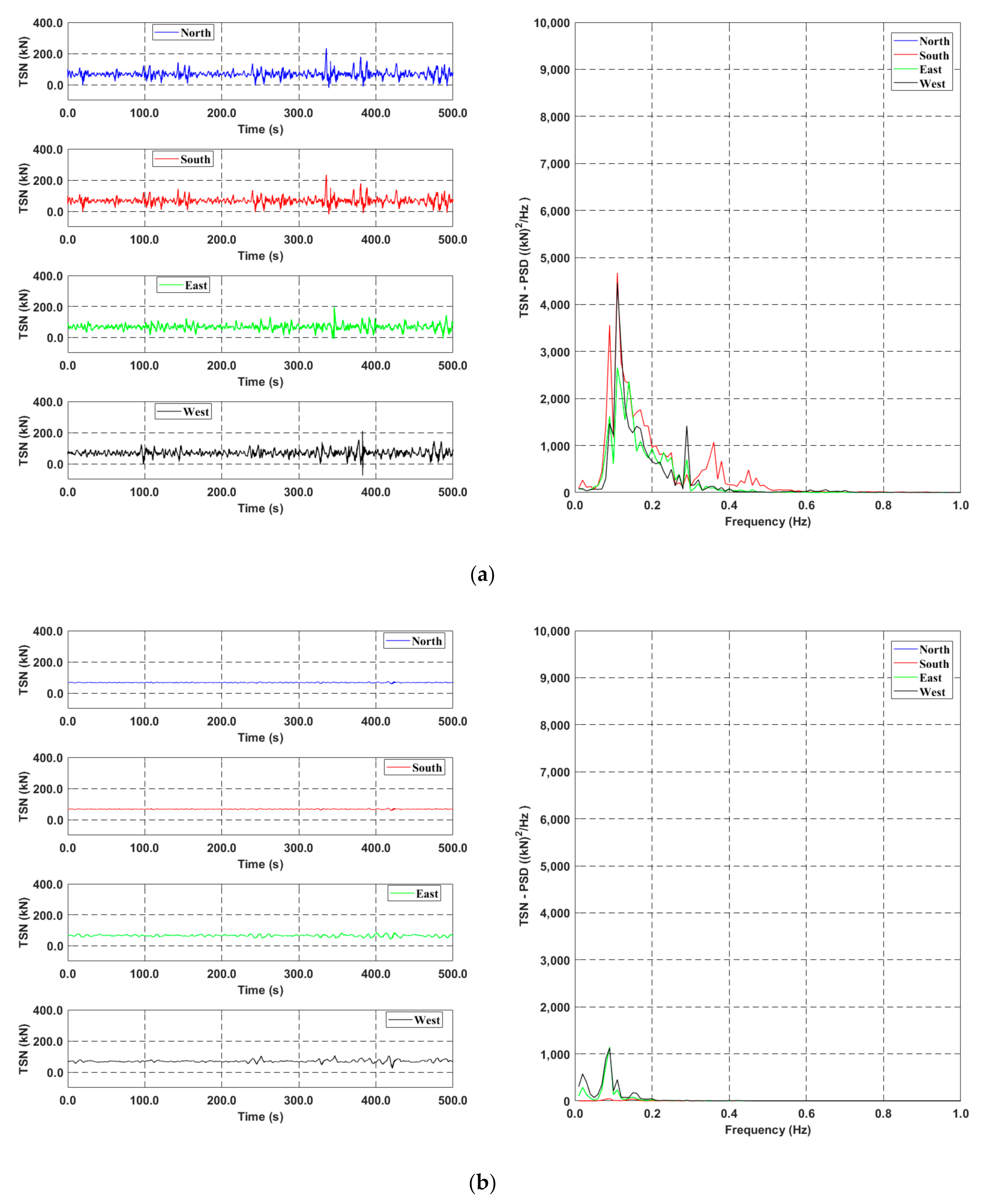
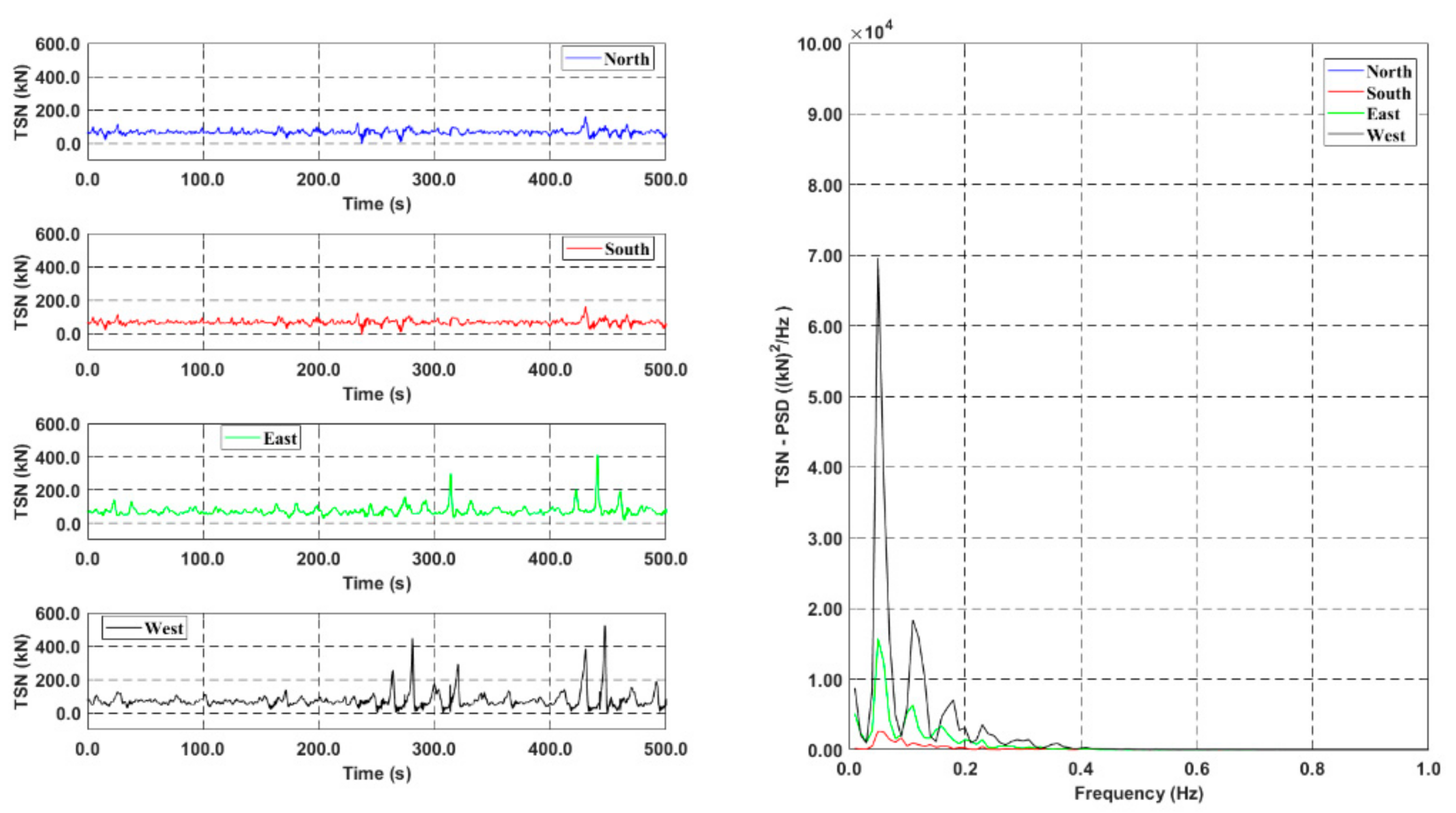
- The mooring dynamics for the hinged connector B.C was greater than that for the fixed connector B.C, and both connectors exhibit similar initial mean values.
- Under extreme wave conditions, the floater dynamic response was amplified, due to the large external loading and resonance effect amplification with a catenary mooring system. In addition, environmental forces (directly affecting the system) significantly influenced the dynamic behavior, rather than the additional moment generated by the connector, based on the vertical or rotational movement of the system at a certain level of external loading.
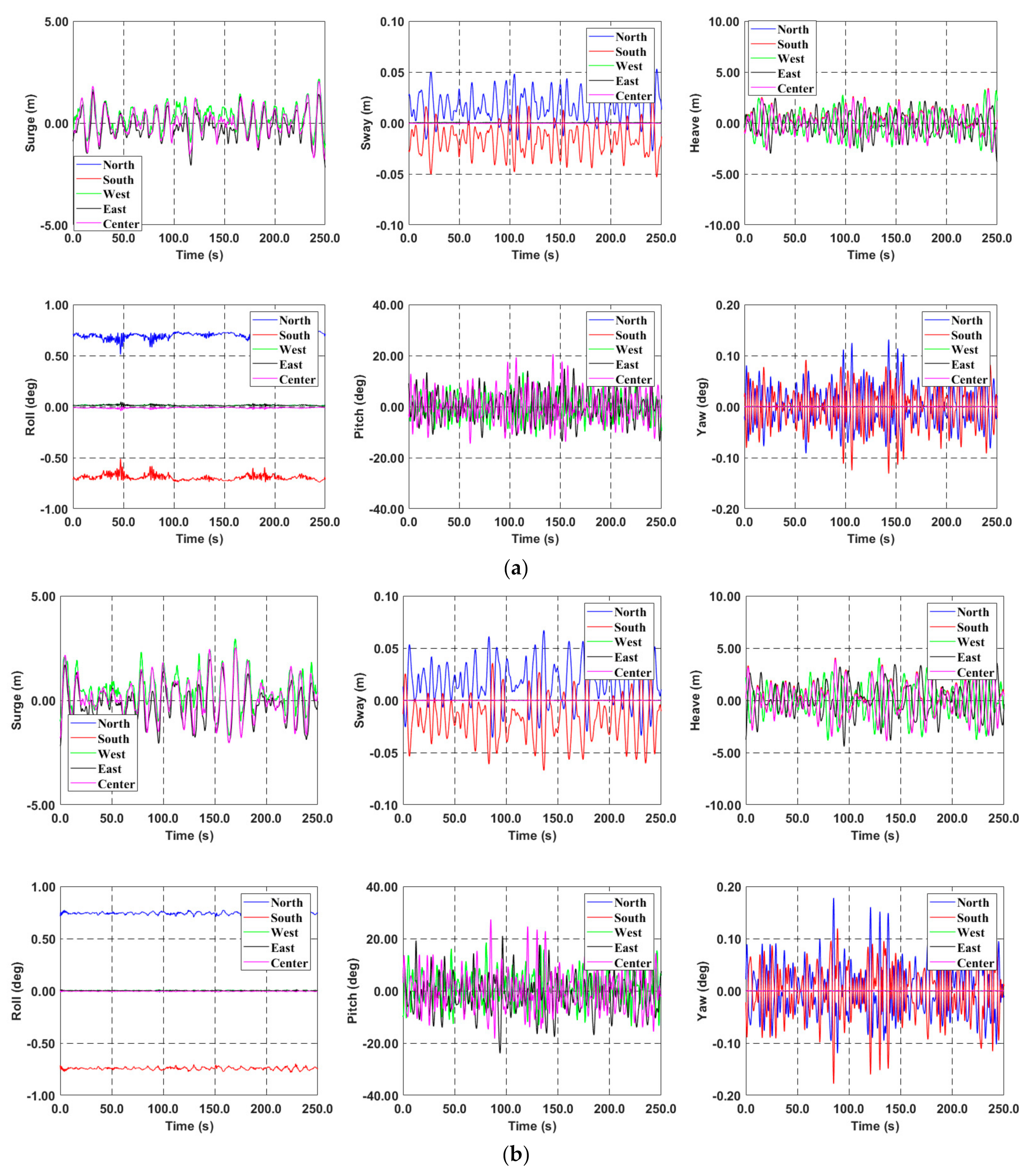
- After multiple failures of the ML, due to the loss of station-keeping load, the dynamic response of the multi-connected floating solar panel system was significantly amplified, and the roll dynamic response decreased, due to an increase in the relative mooring tension at the middle of the location, caused by ML failure.
6. Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hinged B.C | |||||||
|---|---|---|---|---|---|---|---|
| Surge | Sway | Heave | Roll | Pitch | Yaw | ||
| m | m | m | deg | deg | deg | ||
| North | Mean | 43.122 | 92.999 | −0.040 | −0.052 | 0.064 | 0.000 |
| STD. | 0.799 | 0.001 | 1.349 | 0.028 | 6.671 | 0.005 | |
| Max. | 45.598 | 93.000 | 3.925 | 0.018 | 27.657 | 0.017 | |
| Min. | 41.057 | 92.994 | −3.951 | −0.243 | −18.775 | −0.017 | |
| South | Mean | 43.122 | 3.001 | −0.040 | 0.052 | 0.064 | 0.000 |
| STD. | 0.799 | 0.001 | 1.349 | 0.028 | 6.671 | 0.005 | |
| Max. | 45.598 | 3.006 | 3.925 | 0.243 | 27.657 | 0.017 | |
| Min. | 41.057 | 3.000 | −3.951 | −0.018 | −18.775 | −0.017 | |
| West | Mean | 3.409 | 43.000 | −0.184 | 0.009 | −1.047 | 0.000 |
| STD. | 0.726 | 0.000 | 1.337 | 0.005 | 4.472 | 0.001 | |
| Max. | 6.069 | 43.001 | 3.697 | 0.041 | 14.423 | 0.002 | |
| Min. | 1.466 | 43.000 | −4.026 | −0.007 | −14.401 | −0.002 | |
| East | Mean | 92.814 | 43.000 | −0.171 | 0.009 | 0.561 | 0.000 |
| STD. | 0.796 | 0.000 | 1.344 | 0.005 | 6.195 | 0.001 | |
| Max. | 95.567 | 43.001 | 3.233 | 0.047 | 22.272 | 0.002 | |
| Min. | 90.747 | 43.000 | −4.624 | −0.013 | −20.730 | −0.002 | |
| Center | Mean | 43.122 | 53.000 | −0.014 | −0.008 | 0.065 | 0.000 |
| STD. | 0.799 | 0.000 | 1.350 | 0.005 | 6.671 | 0.001 | |
| Max. | 45.597 | 53.000 | 3.939 | 0.008 | 27.661 | 0.003 | |
| Min. | 41.059 | 52.999 | −3.945 | −0.040 | −18.762 | −0.003 | |
| Fixed B.C | |||||||
|---|---|---|---|---|---|---|---|
| Surge | Sway | Heave | Roll | Pitch | Yaw | ||
| m | m | m | deg | deg | deg | ||
| North | Mean | 43.578 | 93.000 | −0.049 | −0.007 | −0.001 | 0.000 |
| STD. | 1.002 | 0.000 | 0.566 | 0.001 | 0.140 | 0.000 | |
| Max. | 46.347 | 93.000 | 1.684 | −0.005 | 0.383 | 0.000 | |
| Min. | 41.436 | 93.000 | −1.781 | −0.010 | −0.404 | 0.000 | |
| South | Mean | 43.578 | 3.000 | −0.049 | 0.007 | −0.001 | 0.000 |
| STD. | 1.002 | 0.000 | 0.566 | 0.001 | 0.140 | 0.000 | |
| Max. | 46.347 | 3.000 | 1.684 | 0.010 | 0.383 | 0.000 | |
| Min. | 41.436 | 3.000 | −1.781 | 0.005 | −0.404 | 0.000 | |
| West | Mean | 3.578 | 43.000 | −0.050 | 0.001 | −0.007 | 0.000 |
| STD. | 1.001 | 0.000 | 0.554 | 0.000 | 0.049 | 0.000 | |
| Max. | 6.341 | 43.000 | 1.658 | 0.001 | 0.130 | 0.000 | |
| Min. | 1.438 | 43.000 | −1.788 | 0.000 | −0.145 | 0.000 | |
| East | Mean | 93.577 | 43.000 | −0.049 | 0.001 | 0.007 | 0.000 |
| STD. | 1.001 | 0.000 | 0.558 | 0.000 | 0.051 | 0.000 | |
| Max. | 96.340 | 43.000 | 1.715 | 0.001 | 0.168 | 0.000 | |
| Min. | 91.438 | 43.000 | −1.738 | 0.000 | −0.131 | 0.000 | |
| Center | Mean | 43.578 | 53.000 | −0.047 | −0.001 | −0.001 | 0.000 |
| STD. | 1.002 | 0.000 | 0.566 | 0.000 | 0.140 | 0.000 | |
| Max. | 46.347 | 53.000 | 1.687 | −0.001 | 0.383 | 0.000 | |
| Min. | 41.436 | 53.000 | −1.779 | −0.001 | −0.405 | 0.000 | |
| North | South | ||||||||
| Mean | STD. | Max. | Min. | Mean | STD. | Max. | Min. | ||
| Hinged B.C | kN | 67.822 | 21.376 | 234.330 | −20.413 | 67.822 | 21.376 | 234.330 | −20.413 |
| Fixed B.C | kN | 67.245 | 1.766 | 75.142 | 57.169 | 67.245 | 1.766 | 75.142 | 57.169 |
| West | East | ||||||||
| Mean | STD. | Max. | Min. | Mean | STD. | Max. | Min. | ||
| Hinged B.C | kN | 68.884 | 18.258 | 211.063 | −75.202 | 67.633 | 17.329 | 196.530 | −9.389 |
| Fixed B.C | kN | 70.186 | 7.528 | 106.289 | 23.487 | 65.149 | 6.070 | 85.535 | 42.182 |
| Extreme | |||||||
|---|---|---|---|---|---|---|---|
| Surge | Sway | Heave | Roll | Pitch | Yaw | ||
| m | m | m | deg | deg | deg | ||
| North | Mean | 42.906 | 92.998 | −0.056 | −0.100 | −0.009 | 0.000 |
| STD. | 3.018 | 0.001 | 1.917 | 0.045 | 4.220 | 0.005 | |
| Max. | 48.877 | 93.000 | 6.013 | −0.006 | 14.117 | 0.019 | |
| Min. | 33.780 | 92.994 | −5.930 | −0.271 | −11.590 | −0.020 | |
| South | Mean | 42.906 | 3.002 | −0.056 | 0.100 | −0.009 | 0.000 |
| STD. | 3.018 | 0.001 | 1.917 | 0.045 | 4.220 | 0.005 | |
| Max. | 48.877 | 3.006 | 6.013 | 0.271 | 14.117 | 0.020 | |
| Min. | 33.780 | 3.000 | −5.930 | 0.006 | −11.590 | −0.019 | |
| West | Mean | 3.044 | 43.000 | −0.215 | 0.015 | −0.940 | 0.000 |
| STD. | 2.994 | 0.000 | 1.797 | 0.007 | 3.275 | 0.001 | |
| Max. | 9.013 | 43.001 | 5.071 | 0.051 | 10.568 | 0.002 | |
| Min. | −5.919 | 43.000 | −5.275 | −0.005 | −10.835 | −0.005 | |
| East | Mean | 92.755 | 43.000 | −0.165 | 0.015 | 0.743 | 0.000 |
| STD. | 3.013 | 0.000 | 1.958 | 0.007 | 4.322 | 0.001 | |
| Max. | 98.642 | 43.001 | 5.372 | 0.047 | 16.794 | 0.003 | |
| Min. | 83.689 | 43.000 | −6.490 | −0.006 | −10.779 | −0.003 | |
| Center | Mean | 42.906 | 53.000 | −0.008 | −0.015 | −0.009 | 0.000 |
| STD. | 3.017 | 0.000 | 1.922 | 0.007 | 4.218 | 0.001 | |
| Max. | 48.873 | 53.000 | 6.058 | 0.004 | 14.112 | 0.003 | |
| Min. | 33.781 | 52.999 | −5.921 | −0.046 | −11.583 | −0.003 | |
| North | South | ||||||||
| Mean | STD. | Max. | Min. | Mean | STD. | Max. | Min. | ||
| Extreme | kN | 68.299 | 14.137 | 162.645 | −3.283 | 68.299 | 14.137 | 162.645 | −3.283 |
| West | East | ||||||||
| Mean | STD. | Max. | Min. | Mean | STD. | Max. | Min. | ||
| kN | 76.178 | 49.172 | 525.101 | 0.389 | 73.589 | 29.441 | 409.289 | 17.533 | |
| Before ML Failure | |||||||
|---|---|---|---|---|---|---|---|
| Surge | Sway | Heave | Roll | Pitch | Yaw | ||
| m | m | m | deg | deg | deg | ||
| North | Mean | 43.077 | 92.999 | −0.055 | −0.058 | 0.012 | 0.000 |
| STD. | 0.662 | 0.001 | 1.104 | 0.028 | 6.158 | 0.005 | |
| Max. | 45.055 | 93.000 | 3.278 | −0.011 | 20.550 | 0.017 | |
| Min. | 41.193 | 92.995 | −2.851 | −0.241 | −14.476 | −0.017 | |
| South | Mean | 43.077 | 3.001 | −0.055 | 0.058 | 0.012 | 0.000 |
| STD. | 0.662 | 0.001 | 1.104 | 0.028 | 6.158 | 0.005 | |
| Max. | 45.055 | 3.005 | 3.278 | 0.241 | 20.550 | 0.017 | |
| Min. | 41.193 | 3.000 | −2.851 | 0.011 | −14.476 | −0.017 | |
| West | Mean | 3.328 | 43.000 | −0.173 | 0.010 | −1.014 | 0.000 |
| STD. | 0.591 | 0.000 | 1.150 | 0.005 | 4.237 | 0.001 | |
| Max. | 5.212 | 43.001 | 3.117 | 0.040 | 12.698 | 0.002 | |
| Min. | 1.747 | 43.000 | −3.028 | −0.002 | −12.750 | −0.002 | |
| East | Mean | 92.815 | 43.000 | −0.171 | 0.010 | 0.588 | 0.000 |
| STD. | 0.660 | 0.000 | 1.092 | 0.005 | 5.495 | 0.001 | |
| Max. | 94.546 | 43.001 | 2.299 | 0.044 | 15.799 | 0.002 | |
| Min. | 90.754 | 43.000 | −3.914 | −0.007 | −12.875 | −0.002 | |
| Center | Mean | 43.077 | 53.000 | −0.027 | −0.009 | 0.012 | 0.000 |
| STD. | 0.662 | 0.000 | 1.105 | 0.005 | 6.158 | 0.001 | |
| Max. | 45.055 | 53.000 | 3.296 | 0.003 | 20.554 | 0.003 | |
| Min. | 41.195 | 52.999 | −2.841 | −0.040 | −14.476 | −0.002 | |
| After ML Failure | |||||||
|---|---|---|---|---|---|---|---|
| Surge | Sway | Heave | Roll | Pitch | Yaw | ||
| m | m | m | deg | deg | deg | ||
| North | Mean | 43.147 | 93.000 | −0.014 | −0.008 | 0.063 | 0.000 |
| STD. | 0.906 | 0.000 | 1.562 | 0.012 | 7.413 | 0.001 | |
| Max. | 45.518 | 93.001 | 3.927 | 0.032 | 27.326 | 0.006 | |
| Min. | 40.961 | 92.999 | −3.873 | −0.051 | −18.263 | −0.011 | |
| South | Mean | 43.147 | 3.000 | −0.014 | 0.008 | 0.063 | 0.000 |
| STD. | 0.906 | 0.000 | 1.562 | 0.012 | 7.413 | 0.001 | |
| Max. | 45.518 | 3.001 | 3.927 | 0.051 | 27.326 | 0.011 | |
| Min. | 40.961 | 2.999 | −3.873 | −0.032 | −18.263 | −0.006 | |
| West | Mean | 3.482 | 43.000 | −0.051 | −0.001 | 0.457 | 0.000 |
| STD. | 0.832 | 0.000 | 1.510 | 0.002 | 5.600 | 0.000 | |
| Max. | 5.996 | 43.000 | 3.929 | 0.011 | 17.705 | 0.001 | |
| Min. | 1.317 | 43.000 | −3.946 | −0.018 | −14.200 | −0.001 | |
| East | Mean | 92.805 | 43.000 | −0.032 | 0.000 | −0.977 | 0.000 |
| STD. | 0.907 | 0.000 | 1.559 | 0.002 | 6.879 | 0.000 | |
| Max. | 95.528 | 43.000 | 3.404 | 0.011 | 21.749 | 0.001 | |
| Min. | 90.748 | 43.000 | −4.532 | −0.010 | −23.192 | −0.001 | |
| Center | Mean | 43.148 | 53.000 | −0.009 | −0.002 | 0.061 | 0.000 |
| STD. | 0.906 | 0.000 | 1.563 | 0.002 | 7.413 | 0.000 | |
| Max. | 45.518 | 53.000 | 3.934 | 0.005 | 27.329 | 0.001 | |
| Min. | 40.962 | 53.000 | −3.873 | −0.010 | −18.264 | −0.002 | |
| North | South | ||||||||
| Mean | STD. | Max. | Min. | Mean | STD. | Max. | Min. | ||
| Before ML Failure | kN | 67.525 | 16.566 | 143.419 | −5.297 | 67.525 | 16.566 | 143.419 | −5.297 |
| After ML Failure | kN | 68.147 | 26.135 | 230.201 | −35.901 | 68.147 | 26.135 | 230.201 | −35.901 |
| West | East | ||||||||
| Mean | STD. | Max. | Min. | Mean | STD. | Max. | Min. | ||
| Before ML Failure | kN | 68.509 | 14.470 | 123.732 | −1.835 | 67.409 | 13.319 | 121.940 | 14.203 |
| After ML Failure | kN | 70.114 | 23.344 | 222.194 | −78.505 | 68.750 | 21.668 | 246.612 | −12.442 |
References
- Renewables 2020 Global Status Report. (Paris: REN21 Secretariat). 2020. Available online: https://www.globalwomennet.org/renewables-2020-global-status-report/ (accessed on 1 October 2021).
- Chung, W.C.; Pestana, G.R.; Kim, M. Structural health monitoring for TLP-FOWT (floating offshore wind turbine) tendon using sensors. Appl. Ocean Res. 2021, 113, 102740. [Google Scholar] [CrossRef]
- Bloomberg New Energy Finance. Global Trends in Renewable Energy Investment 2017. 2017. Available online: https://www.greengrowthknowledge.org/research/global-trends-renewable-energy-investment-2017/ (accessed on 1 October 2021).
- Sahu, A.; Yadav, N.; Sudhakar, K. Floating photovoltaic power plant: A review. Renew. Sustain. Energy Rev. 2016, 66, 815–824. [Google Scholar] [CrossRef]
- Oliveira-Pinto, S.; Stokkermans, J. Marine floating solar plants: An overview of potential, challenges and feasibility. Proc. Inst. Civ. Eng. Marit. Eng. 2020, 173, 120–135. [Google Scholar] [CrossRef]
- Jamalludin, M.A.S.; Muhammad-Sukki, F.; Abu-Bakar, S.H.; Ramlee, F.; Munir, A.B.; Bani, N.A.; Muhtazaruddin, M.N.; Mas’ud, A.A.; Ardila-Rey, J.A.; Ayub, A.S. Potential of floating solar technology in Malaysia. Int. J. Power Electron. Drive Syst. 2019, 10, 1638–1644. [Google Scholar] [CrossRef] [Green Version]
- Rosa-Clot, M.; Rosa-Clot, P.; Tina, G.; Scandura, P. Submerged photovoltaic solar panel: Sp2. Renew. Energy 2010, 35, 1862–1865. [Google Scholar] [CrossRef]
- Friel, D.; Karimirad, M.; Whittaker, T.; Doran, W.; Howlin, E. A review of floating photovoltaic design concepts and installed variations. In Proceedings of the 4th International Conference on Renewable Energies Offshore, Lisbon, Portugal, 12–15 October 2020; pp. 1–10. [Google Scholar]
- Friel, D.; Karimirad, M.; Whittaker, T.; Doran, J. Hydrodynamic investigation of design parameters for a cylindrical type floating solar system. In Proceedings of the 4th International Conference on Renewable Energies Offshore, Lisbon, Portugal, 12–15 October 2020; pp. 763–770. [Google Scholar]
- Cazzaniga, R.; Cicu, M.; Rosa-Clot, M.; Rosa-Clot, P.; Tina, G.; Ventura, C. Floating photovoltaic plants: Performance analysis and design solutions. Renew. Sustain. Energy Rev. 2018, 81, 1730–1741. [Google Scholar] [CrossRef]
- Dai, J.; Zhang, C.; Lim, H.V.; Ang, K.K.; Qian, X.; Wong, J.L.H.; Tan, S.T.; Wang, C.L. Design and construction of floating modular photovoltaic system for water reservoirs. Energy 2020, 191, 116549. [Google Scholar] [CrossRef]
- Clemons, S.K.C.; Salloum, C.R.; Herdegen, K.G.; Kamens, R.M.; Gheewala, S.H. Life cycle assessment of a floating photovoltaic system and feasibility for application in Thailand. Renew. Energy 2021, 168, 448–462. [Google Scholar] [CrossRef]
- Temiz, M.; Javani, N. Design and analysis of a combined floating photovoltaic system for electricity and hydrogen production. Int. J. Hydrogen Energy 2020, 45, 3457–3469. [Google Scholar] [CrossRef]
- Al-Yacouby, A.; Halim, E.R.B.A.; Liew, M. Hydrodynamic analysis of floating offshore solar farms subjected to regular waves. In Advances in Manufacturing Engineering; Springer: Berlin, Germany, 2020; pp. 375–390. [Google Scholar]
- Ravichandran, N.; Ravichandran, N.; Panneerselvam, B. Performance analysis of a floating photovoltaic covering system in an Indian reservoir. Clean Energy 2021, 5, 208–228. [Google Scholar] [CrossRef]
- Michailides, C.; Loukogeorgaki, E.; Angelides, D.C. Response analysis and optimum configuration of a modular floating structure with flexible connectors. Appl. Ocean Res. 2013, 43, 112–130. [Google Scholar] [CrossRef]
- Ikhennicheu, M.; Danglade, B.; Pascal, R.; Arramounet, V.; Trébaol, Q.; Gorintin, F. Analytical method for loads determination on floating solar farms in three typical environments. Sol. Energy 2021, 219, 34–41. [Google Scholar] [CrossRef]
- Kim, S.-H.; Baek, S.-C.; Choi, K.-B.; Park, S.-J. Design and installation of 500-kW floating photovoltaic structures using high-durability steel. Energies 2020, 13, 4996. [Google Scholar] [CrossRef]
- Kim, S.-H.; Yoon, S.-J.; Choi, W. Design and construction of 1 MW class floating PV generation structural system using FRP members. Energies 2017, 10, 1142. [Google Scholar] [CrossRef] [Green Version]
- Choi, J.-Y.; Hwang, S.-T.; Kim, S.-H. Evaluation of a 3.5-MW floating photovoltaic power generation system on a thermal power plant ash pond. Sustainability 2020, 12, 2298. [Google Scholar] [CrossRef] [Green Version]
- Trapani, K.; Millar, D.L. Floating photovoltaic arrays to power the mining industry: A case study for the McFaulds lake (ring of fire). Environ. Prog. Sustain. Energy 2016, 35, 898–905. [Google Scholar] [CrossRef]
- Choi, Y.-K.; Lee, N.-H.; Lee, A.-K.; Kim, K.-J. A study on major design elements of tracking-type floating photovoltaic systems. Int. J. Smart Grid Clean Energy 2014, 3, 70–74. [Google Scholar] [CrossRef] [Green Version]
- Orcina. Orcawave User Manual; Orcina: Ulverston, UK, 2021. [Google Scholar]
- Orcina. Orcaflex User Manual; Orcina: Ulverston, UK, 2006. [Google Scholar]







| Name | Unit | Value | |
|---|---|---|---|
| Mass | ton | 3.0578 | |
| Center of gravity | X | m | 0 |
| Y | m | 0 | |
| Z | m | 0.5481 | |
| Moment of inertia | Roll | ton-m2 | 19.068 |
| Pitch | ton-m2 | 19.068 | |
| Yaw | ton-m2 | 35.063 | |
| Heave | Roll | Pitch |
|---|---|---|
| 283.1 | 0 | 0 |
| 0 | 1610.7 | 0 |
| 0 | 0 | 1610.7 |
| Steel Wire | ||
|---|---|---|
| Type | [-] | 6 × 19 Wire with Fiber Core |
| Nominal diameter | [m] | 0.15 |
| Mass in air | [kg/m] | 81.3 |
| Displaced mass | [kg/m] | 12.2 |
| Axial stiffness (EA) | [MN] | 825.8 |
| Arc length | [m] | 90 |
| MBL (minimum breaking load) | [kN] | 11,812.5 |
| Connecting Structure | ||
|---|---|---|
| Type | [-] | Steel Pipe |
| Outer diameter | [m] | 0.6 |
| Wall thickness | [m] | 0.2 |
| Mass in air | [kg/m] | 1972.9 |
| Axial stiffness (EA) | [MN] | 53,281.4 |
| Bending stiffness (EI) | [MN-m2] | 1332.0 |
| Wave | ||||
|---|---|---|---|---|
| Spectrum | Gamma | Significant Wave (Hs) | Spectral Period (Tp) | |
| (-) | (-) | (m) | (s/Hz) | |
| Normal operating | JONSWAP | 2.2 | 5.5 | 10.2/0.098 |
| Extreme | JONSWAP | 2.2 | 8.7 | 17.2/0.058 |
| 1st (Surge, Sway Governed) | 2nd (Yaw Governed) | |
|---|---|---|
| Unit | Hz | Hz |
| Value | 0.04248 | 0.05306 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Kim, J.; Lee, J.; Kim, S.; Chung, W. Dynamic Response of Multiconnected Floating Solar Panel Systems with Vertical Cylinders. J. Mar. Sci. Eng. 2022, 10, 189. https://doi.org/10.3390/jmse10020189
Song J, Kim J, Lee J, Kim S, Chung W. Dynamic Response of Multiconnected Floating Solar Panel Systems with Vertical Cylinders. Journal of Marine Science and Engineering. 2022; 10(2):189. https://doi.org/10.3390/jmse10020189
Chicago/Turabian StyleSong, Jihun, Joonseob Kim, Jeonghwa Lee, Seungjun Kim, and Woochul Chung. 2022. "Dynamic Response of Multiconnected Floating Solar Panel Systems with Vertical Cylinders" Journal of Marine Science and Engineering 10, no. 2: 189. https://doi.org/10.3390/jmse10020189
APA StyleSong, J., Kim, J., Lee, J., Kim, S., & Chung, W. (2022). Dynamic Response of Multiconnected Floating Solar Panel Systems with Vertical Cylinders. Journal of Marine Science and Engineering, 10(2), 189. https://doi.org/10.3390/jmse10020189