Abstract
With the increase of accidents and disasters occurring in the explosive environment, search-and-rescue activities are more and more essential. At present, explosive-proof robots can be designed for detection in the explosive environment. However, most robots only detect parameters of disaster scenes, and cannot go forward when they are blocked by obstacles. So, manipulators are needed in order for robots to finish search-and-rescue missions. However, few robots can meet these requirements, because it is difficult to design an explosive-proof manipulator. This paper introduces a method used for designing manipulators which can work in the explosive environment. The manipulator adopted in this design method can drive more than three joints, and only uses two motors. One motor is used to supply power for driving joints and the other is used for switching the power among joints. Both of them can be separated with a manipulator and mounted on a robot chassis with an explosive-proof box. In this way, the load capacity and explosion-proof security of manipulators can be improved. The development of this design method can provide a reference for designers to develop future search-and-rescue robots in explosive environments.
1. Introduction
Currently, manipulators act as “right hands”, assisting humans in areas such as industrial production, agricultural engineering, medical treatment and rehabilitation, aerospace engineering, search-and-rescue, etc. In recent years, disasters and industrial accidents have occurred with high frequency, and the need for manipulators for search-and-rescue missions has increased accordingly. Manipulators can be especially helpful in emergencies where human activity is made complicated. In the radiation leak at the Fukushima Daiichi nuclear plant, the pump truck made by SANY GROUP helped rescuers inject water into the reactor using its manipulator [1]. However, the pump truck was designed to build buildings, and the nuclear plant had no prepared plans or resources for a rescue operation of this nature or scale. Therefore, they asked the SANY GROUP for help and the pump truck was transported from Changsha, Hunan Provence, China to the accident scene. Therefore, it is important to develop and prepare search-and-rescue manipulators for the prevention of different crises before disasters and industrial accidents emerge, and they should be specially designed for different disaster environments—for example, working in earthquake [2], explosive ordnance disposal [3,4], and explosive environments.
Coal mine disasters have happened frequently in the last ten years, and search-and-rescue missions can be carried out by explosive-proof robots to improve the safety of rescuers. The robots [5,6,7,8] can only detect parameters of the explosive environment, because they are eventually blocked and become unable to continue detecting. Therefore, an explosive-proof manipulator is needed to help robots clear obstacles from their path. However, explosive-proof manipulators are very difficult to design. They should be specially designed in order to search and rescue in the explosive environment [9]. During operation, they should not ignite combustible gases by their electric components, making it is very difficult to ensure safety in the explosive environment. In an explosive environment, a working motor will lead to an explosion if it is not protected by an explosive-proof box. When a robot is searching and rescuing in an explosive environment, its explosive-proof boxes should not be damaged by an explosion caused by other factors. If the explosive-proof box is damaged, the motor or other electrical equipment will lead to a secondary explosion which will damage the environment again. After an explosion, the robot will be out of operation and will not affect the explosive environment, and the rescuers should use another new one to continue the search and rescue operation. Safer designs would make use of more mechanical components and fewer explosive-proof boxes for electric components.
The choices of manipulator drive methods are various, including motor drive, pneumatic drive, and hydraulic drive methods. The manipulators using the hydraulic drive method have the largest power among the three drive methods, and are always applied to large-scale equipment to finish hard work. In the application of engineering machinery for the architectural industry (e.g., the pump truck mentioned above), the hydraulic drive method is the best choice for manipulator design because of its high power capacity [10,11]. The pneumatic drive method is dexetrous and applied easily because it is light, but its power is lower than the others [12,13]. It is usually used in industrial assembly lines, and the supply of the air resource can be concentrated conveniently. In recent years, the pneumatic drive method has been applied to the research of artificial muscles which can drive a manipulator in a manner similar to the human hand [14]. The motor driving method is the most widely used, and can be used more skilfully than the others. The methods of power transmission from the motor to the actuator are various (usually motor–reducer–actuator or motor–pulley–actuator). These manipulators are essential, and can work more effectively and skillfully than humans. Artificial limb and rehabilitation manipulators are always driven by motors. In recent years, the transmission method of motor–wire–actuator has been widely used in artificial limbs [15] and palm rehabilitation [16]. Robot manipulators used in surgery adopt a motor–reducer–actuator structure because of its high precision. A manipulator can also be integrated with aerospace craft or satellites to maintain and aid in work in space. These manipulators must be anti-radiation and high-temperature-resistant [17].
If an explosive-proof manipulator adopts the hydraulic drive method, a hydraulic pump and hydraulic fluid must be included, which will dramatically increase the power consumption of its robot chassis. The pneumatic drive method will exhaust work gases, which can change the explosive environment [18]. When the pneumatic drive method is used, there is an unpredictability problem introduced by the work gases. Therefore, the motor drive method is preferred.
Every joint of manipulators and robots are usually driven directly by a motor. Therefore, the motor will move together with the manipulator arm [19]. In the explosive environment, every motor must be enveloped in an explosive-proof box made of steel. This will make the drive unit very heavy, and requires the adoption of a motor with greater power. Then, the steel box will become bigger with the increment of the motor dimensions. As a result, the manipulator will become very large and heavy in order to be explosive-proof. On the other hand, the electric wires which are used to connect every joint’s motor to the battery and controller are fixed on the manipulator, and will destroy the battery and result in an explosion when the wire is fired or in a high-temperature environment. So far, there are two robots which are assembled with an explosive-proof manipulator. One is the V2 robot [20], and one is its new edition prototype [21]. Both use motors to directly drive the joint. If the manipulator uses the motor–wire drive method [22,23], the motors used for drive joints can be assembled at the end of it and the motors can be separated from the manipulator [23]. In this way, the manipulator can improve its work capacity by reducing its mass. However, the angular displacement of the joint is determined by the storage capacity of the wire. If the joint needs to rotate unlimitedly, the problem of wire storage becomes very difficult. The characteristics of the motor–pulley transmission method [24,25] applied in manipulators are similar to the motor–wire structure, but its angular displacement has no limits. Both of the transmission methods can separate the motors from the manipulator, however, the number of motors is still the same as the number of joints. When there are many joints, it results in motors which are too numerous to be assembled on the robot chassis because of the limited space.
This paper introduces a novel design method for manipulators which can search and rescue in the explosive environment, especially in the underground coal mine environment. The manipulators adopted in this design method can ensure the security of the explosive environment. Finally, the paper describes the prototype that was developed and the experiments that were run to evaluate it. The prototype manipulator not only separates the motors from the manipulator, but also uses only two motors to drive three joints. One motor is a power motor which supplies the power for joint rotation. The other motor is a switch motor which is used to switch power among joints. The number of joints in the manipulator is determined by the dimensions of cams, not by the number of motors. Power switching among joints is realized by the switch motor and power switch units (PSUs) which are integrated into every joint. Under this design method, every joint can maintain its status independently of whether other joints are driven or not. If it is driven by the power motor, it will not influence the other joints because they can maintain their status with self-lock mechanisms.
In this paper, the PSU is introduced in Section 2.1, including power transmission to joints, the motion for switching power among joints, and the design of cam components. The power switch theory of the design method is introduced in Section 2.2. Section 3.1 presents the application of the design method to a manipulator prototype; Section 3.2 presents the experiments on the manipulator prototype, and the results are discussed in Section 4. Section 5 concludes.
2. Materials and Methods
2.1. Power Switch Unit
The PSU (power switch unit) is the most important unit in the design method proposed in this paper, and it is integrated into every joint. It can switch the power to the specified joint among manipulator joints and transmit the power to the specified joint. Although they are two different control processes, they take place at the same time to reduce the number of motors for the design method. The PSU can protect the status of the other joints from the rotation of the specified joint. The PSUs are designed the same in every joint for convenient control. In this part, the processes of power transmission to joints and the motion for switching among joints are presented, and the design method of cams used for controlling the processes is also introduced.
2.1.1. Transmitting Power to Joints
The structure of the PSU is shown in Figure 1a,b, and Figure 1b is a cross-sectional view of Figure 1a. Under the status in Figure 1, the PSU is neither transmitting the power to the current joint nor switching the power to the current joint. This status is named the “switched off” status in the remainder of this article. Furthermore, all the part numbers of the parts or groups in Figure 1 are described in the text. Group A and Group B in the PSU are used for switching the power among joints. Group C and Group D are used for transmitting the power from the power motor to the current joint.
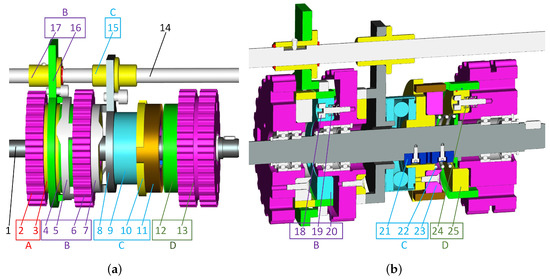
Figure 1.
The structure of the power switch unit (PSU) in “switched off” status. (a) The PSU structure in “switched off” status. (b) The PSU cross-sectional view is in “switched off” status. Part 1 is the transmission shaft used for transmitting the power to the current joint, and all the other parts of the PSU are assembled on it. Part 2 (SJPS) is the slave pulley used for transmitting the rotation of switch motor. Part 3 is the slave clutch used for switching power among joints. Part 4 is the master clutch used for switching power among joints; it can slide along the axis direction of Part 7. Part 5 (SJC) is the cam used for switching power among joints; it is fixed with Part 4, so it can slide along the axis direction of Part 7 together with Part 4. Part 6 (SJPM) is the master pulley used for switching power among joints. Part 7 (SPC) is the switch power cam used for transmitting power to the current joint. Part 8 (SPF) is the switch power cam follower of Part 7; it can slide along the direction of the axis of Part 1. Part 9 is thrust bearing. Part 10 is the slider. Part 11 is the master clutch used to transmit power to the current joint. Part 12 is the slave clutch used to transmit power to the current joint. Part 13 (SPP) is the power pulley. Part 14 is the guide rod. Part 15 is the guide sleeve of Part 8. Part 16 (SJF) is the cam follower for Part 5. Part 17 is the sleeve used for positioning Part 16.
In Figure 1, in order to transmit power from Part 12 (slave clutch used to transmit power to the current joint; fixed with Part 13, power pulley, which is driven by the power motor) to the transmission shaft (Part 1, used for driving the current joint), Group C is designed for switching on/off power from the power motor to the current joint which will be driven. Group C is a slider component (shown in Figure 2) and is used to switch on/off the power transmitted from the motor to current joint by sliding along the axis direction of the transmission shaft (Part 1). The joint is not driven in Figure 2. The distance from the master clutch (Part 11, used to transmit power to the current joint) to the slave clutch (Part 12) is at its farthest due to the spring (Part 22) pushing the slider (Part 10). The spring (Part 22) is initially preloaded, which makes the SPF (Part 8, the switch power cam follower of Part 7) contact with SPC (Part 7, the switch power cam used for transmitting power to the current joint) closely. Figure 3 shows the “switched on” status of PSU. The SPC (Part 7) pushes the SPF (Part 8) forward by its work area and the spring (Part 22) is compressed. When the height of the SPC’s work area reaches the maximum height, the two clutches (Part 11 and Part 12, used for switching on/off power transmitted from the power motor to the current joint) are meshed with each other and lead to the power from the motor being transmitted to the current joint. To make the two clutches mesh stably, the spring (Part 24) begins to be compressed at the last 1 mm of the process of the two clutches meshing with each other. At this moment, the spring (Part 22) is compressed to the shortest. Because the spring (Part 22) is at its shortest length to ensure the power transmission from the motor to the transmission shaft (Part 1), Part 9 as a thrust bearing is essential for protecting the SPF (Part 8) from the influence of the rotation of slider (Part 10), which transmits the rotation to transmission shaft (Part 1) by the guidance key (Part 21).
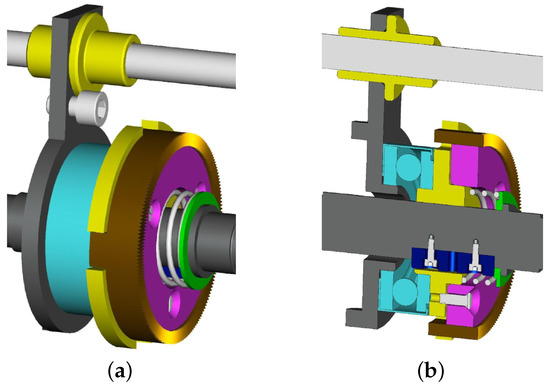
Figure 2.
The structure of Group C under switched off status. (a) Group C in the switched off status. (b) Cross-sectional view of Group C which in switched off status.
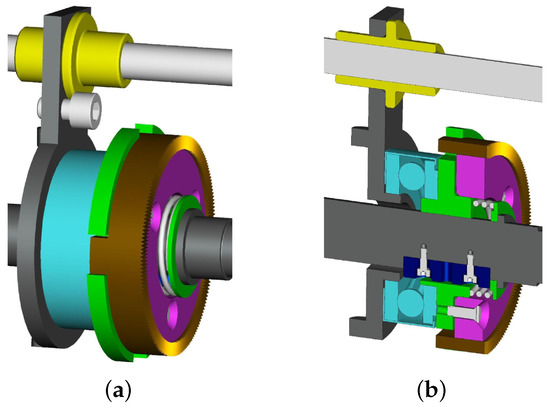
Figure 3.
The structure of the PSU in “switched on” status. The spring (Part 22) is compressed. (a) Group C in switched off status. (b) Cross-sectional view of Group C in switched off status.
In order for the manipulator to be driven by one motor, every joint is connected to the power motor by a pulley–belt mechanismGroup D is designed to connect the power motor with every joint and is driven synchronously. In order to avoid influencing the transmission shaft (Part 1) when any joint is rotating, Group D is assembled with Part 1 by bearings. In this way, the power can be transmitted stably from the power motor to the specified joint.
2.1.2. Motion of Switching Power among Manipulator Joints
In order to decrease the quantity of motors which are used for driving manipulator joints, the design method in this paper uses a switch motor to switch power among joints and transmit power to the specified joint. The cam work area of SJC and SPC are at the same phase in a circle (shown in Figure 4). If the power is transmitted to the current joint through the SPC pushing the SPF forward, the SJC (the cam used for switching power among joints) will be pushed away by the SJF which leads to the master clutch (Part 4) separating from the slave clutch (Part 3). At this moment, Group A and Group B (which are in other joints behind the current joint) will not influence the current joint (introduced in detail in Section 2.2). So, the joint can obtain the power from the power motor at the same time when the current joint is specified to be driven. In this way, the design method of this paper can use a switch motor to realize the two control processes.
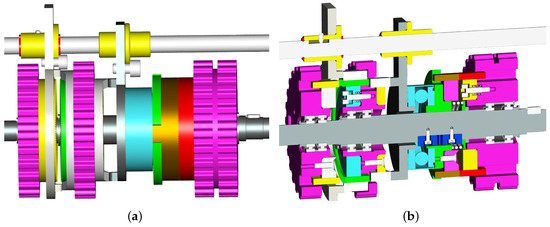
Figure 4.
The structure of the PSU in switched on status. (a) The PSU structure in switched on status. (b) The PSU cross-sectional view in switched on status. Part 18 is the limit screw. Part 19 is the spring with initial preload used to push Part 4 for meshing with Part 3 when the current joint is not driven. There are three Part 19s in a circle. Part 20 is the guide sleeve which can slide along the axis direction of Part 7 together with Part 4. Part 21 is the guide key fixed in Part 1 to make the slider (Part 10) slide along it and rotate together with Part 1. Part 22 is the spring with initial preload used to make Part 10 and Part 11 separate from each other to switch off the power transmitting from the power motor to Part 1 when the current joint is not driven. Part 23 is a connector used for organizing Part 10 and Part 11 as a rigid part. Part 24 is a spring, compressed to make the Part 11 and Part 12 mesh stably when they mesh with each other. There are three Part 24s in a circle. Part 25 is a connector which can slide along Part 13 together with Part 12.
2.1.3. Cams Design Method
The two cam components play the most important role in the PSU—they determine the power switching and transmission among the joints. So, the SPC and SJC should be designed with utmost care. Figure 5 shows the two cam components.
Figure 5.
The cam components. (a,b) SPC and SPF cam components. (c,d) SJC and SJF cam components.
The cams are responsible for transferring the precise angular displacement of the switch motor to the precise linear displacement of cam followers for realizing power transmission and joint switching. Therefore, the work areas of the cams should be designed carefully to ensure that SPF and SJC components are driven smoothly and accurately. To drive their followers stably, every cam has two work areas which are distributed approximately in a circle to push followers.
In order to make the cam followers SPF and SJC slide smoothly, a sine law curve was adopted for the design of the cams’ work area. In order to activate the motions of switching power among joints and transmitting power to joints at the same time, the work area distribution of SPC and SJC in the circle were designed as the same and differ only in work radius. The sine law curve of the cam work area is composed of eight segments to make the SPF and SJC slide smoothly for improving the stability.
Equation (1) gives the height law of SPC and SJC from 0–180 deg in a circle. In the equation, s represents the height of the cam work area and it is also the linear displacement of the SPC and SJF. – (listed in Figure 6a) represent the height of the cam work area and are also the linear displacement of the SPC and SJF in the eight segments. h represents the maximum height of the cam work area. represents the maximum height of the and of the cam law curve. represents the maximum height of the and of the cam law curve. represents the angular position of the cam in the region of 0 to . – represent the partition point of – segments in the whole region. Accumulations of SPC and SJF by Equation (1) are shown in Figure 6a,b.
Figure 6.
The height curves of SPC and SJC. (a) The work height of SPC’s work area. (b) The work height of SJC’s work area.
Equation (2) and Figure 7 give the velocity of the SPF and SJC when they are pushed from 0 mm to 3 mm by SPC and SJF. In the equation, v represents the linear velocity of the SPC and SJF along their axis directions. – represent the linear velocity of the SPC and SJF in the eight segments along their axis directions. r represents the working radius of the cam. represents the angular velocity of the cam.
Figure 7.
The velocity curves of SPC and SJF. (a) The velocity of SPF pushed by SPC. (b) The velocity of SJC pushed by SJF.
Equation (3) give the acceleration of the SPF and SJC when they are pushed from 0 mm to 3 mm by SPC and SJF. In the equation, a represents the linear acceleration of the SPC and SJF along their axis directions. – represent the linear acceleration of the SPC and SJF in the eight segments along their axis directions.
The –s segments are the motion region, and are the sine law curve, the return region is designed to be the same as the motion region. In Figure 8, the accelerations of SPF and SJC are consistent and smooth without a discontinuity point. This will make the SJPM (Part 6) rotate smoothly without impact when the velocities of SPF and SJC are changed.
Figure 8.
The velocity of SPC pushed by SJF. (a) The acceleration of SPF pushed by SPC. (b) The acceleration of SJC pushed by SJF.
Equation (4) and Figure 9 give the pressure angle of the cam mechanism. In the equation, represents the pressure angle between the cam and its follower. – represent the pressure angle between the cam and its follower in the eight segments.
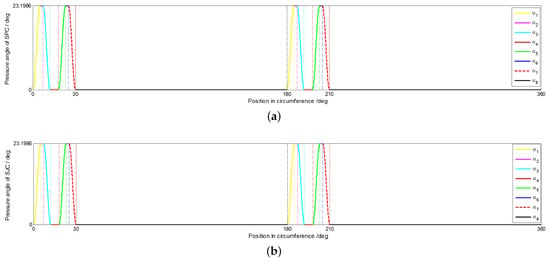
Figure 9.
The pressure angle curves of SPC and SJF. (a)The pressure angle between SPF for SPC. (b) The pressure angle between SJF for SJC.
The contact surfaces between cams (SPC, SJC) and their followers (SPF, SJF) are not consistent. In segment of the cam curve, the contact surface should be particularly rough to ensure the friction force is higher than the damping force of SJPM (the master pulley used for switching power among joints) and SJPS (the slave pulley used for transmitting the rotation of the switch motor) for maintaining the phase between the work areas of cams (it will be introduced in detail in Section 2.1.2). In segment –, the contact surfaces between cams and their followers are very smooth and can be ignored to reduce the resistance of driving. Equations (5) and (6) give the calculation method of the driving force of the SPF and SJC by SPC and SJF. As a result, the cams are designed suitably and the SPF and SJC can slide smoothly in this design method.
2.2. Motion Theory of the Manipulator
2.2.1. Phase Difference Caused by Joint Rotation
To introduce the motion theory of the manipulator clearly and comprehensively, three joints are organized as an illustration model (shown in Figure 10 and Figure 11). This section will introduce how the manipulator switches power among joints. In Figure 10, the PSU of is in switched off status, and it is switched on in Figure 11a. In Figure 11b, the is driven to rotate for . During this process, the phase of every joint’s cam work area is still maintained and not influenced by the motion of .
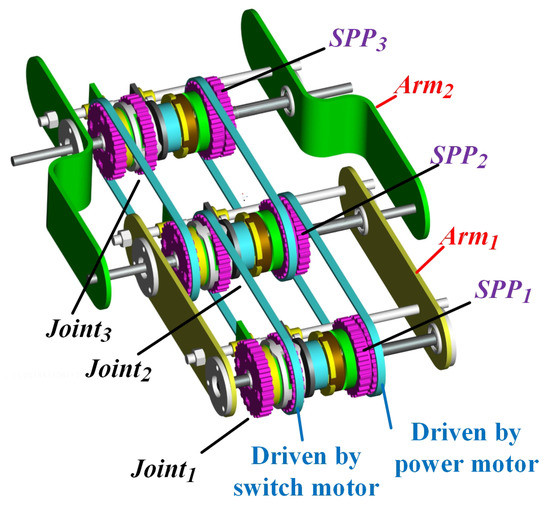
Figure 10.
The is in switched off status before being driven. – is Part 13 (power pulley) of the PSU of –. will be driven by relative to .
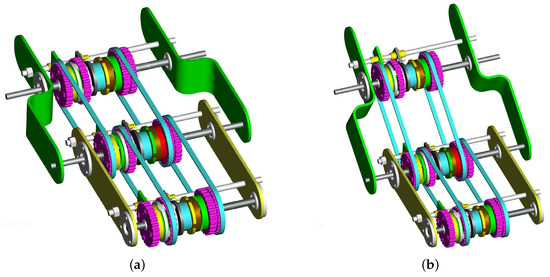
Figure 11.
The drives the to rotate for . (a) The is in switched on status. (b) The is after having been driven for .
The – in Figure 10 is shown in detail in Figure 12. The – are connected in series, and they are driven by power motors synchronously. The mark points of – are in the same phase (shown in Figure 12a–(2)) before the is rotated. When the is driven to rotate for , the will revolve around which leads to it rotating for (shown in Figure 12b–(2), calculated in Equation (7)) around its own axis.
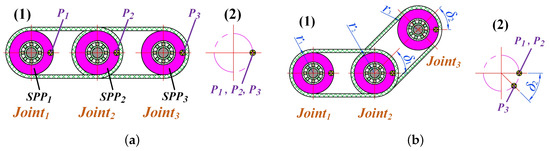
Figure 12.
(a) The status of power pulleys before the is driven to rotate. (b) The status of power pulleys after the is driven to rotate. (b) is the phase difference of the after the is rotated relative to (a). – are the radii of the –. – are the mark points of –. The (a)–2 and (b)–2 is the phase relationship of –.
2.2.2. Power Switching among Joints
The SJPM and SJPS of every joint’s PSU are organized by belts (shown in Figure 10); the SJC is driven by SJPM and they are shown in detail in Figure 13a (the same as – in Figure 12). They are driven by the switch motor synchronously and their work areas are evenly distributed on the circumference (shown in Figure 14). In Figure 13, – rotate around a circle and – will push the – only once per circle. Figure 13f is the status of the PSU in Figure 11a.
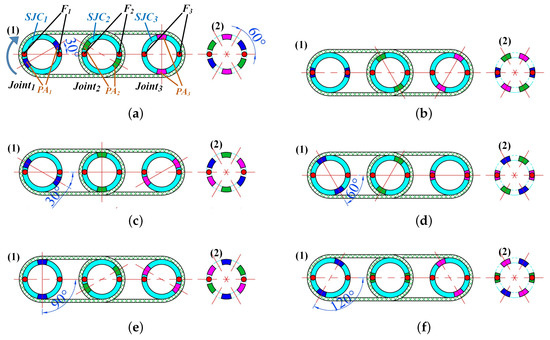
Figure 13.
The phase relations of work areas of 3 cams which are driven to rotate clockwise by the switch motor. – are cam work areas of –. – are the contact points between the SJC and SJF of –. The right sub-sub-figure of every sub-figure is the current phase of cams’ work areas. (a) The initial status of –. (b) – rotate 30 deg synchronously relative to (a). (c) – rotate 30 deg synchronously relative to (b). (d) – rotate 30 deg synchronously relative to (c). (e) – rotate 30 deg synchronously relative to (d). (f) – rotate 30 deg synchronously relative to (e).
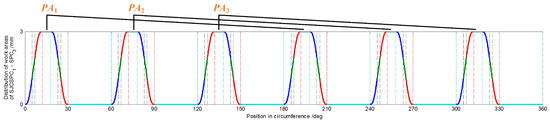
Figure 14.
The phase among work areas – of – is driven synchronously by a switch motor. The phase among work areas – of – is the same as –.
If the is driven, the difference will also occur between the SJC and SJF without any measures. Figure 15 shows the influence of the differences () in the phase of when the is driven to rotate for . The phase relationship among the cams of PSUs is changed, and leads to the manipulator driving two joints ( and ) at the same time (shown in Figure 15). It will result in the manipulator being out of control.
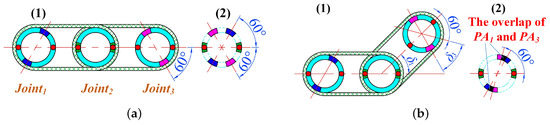
Figure 15.
The phase difference for the after the is rotated . (a) The iniational status of three joints. (b) The work areas of the and will be driven at the same time. The work areas of the and overlap. If the switch motor driving the cams makes the contact the , then may contact the at the same time. So the and will be driven at the same time.
Therefore, a pair of clutches (Part 3 and Part 4 in Figure 1) are adopted to separate the rotation between SJPM and SJPS when the is driven (shown in Figure 16). If the is in switched on status (Figure 11a), its SJPS will be driven to rotate by the and the phase difference will occur between SJPM and SJPS. When the finishes rotating, the phase of every SJC is unchanged because the SJPM separates from SJPS. Finally, the phase difference occurred only on the two clutches; the initial phase among – and – is maintained. So, the other two joints are not influenced by the motion of the current joint. If the manipulator continues switching power among joints, then the switch motor will rotate the SJPM to return along the original road and SJPS will be together with SJPM as before (the separating motion has been presented in Section 2.1.2). As a result, the phases of all the cams in every joint’s PSU can maintain their initial relations in this way (compare Figure 16a–(2) with Figure 16b–(2)).
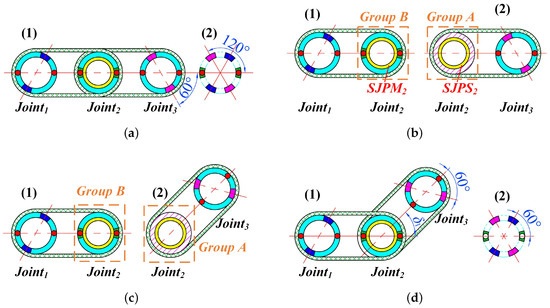
Figure 16.
There is no phase difference for the after the rotates by the two clutches that are used for separating the power transmission of cams’ rotation when the joint is driven. The structures of , , and are shown in Figure 1. (a) The iniational status of three joints. (b) The is divided into Group A and Group B. (c) The rotates . (d) The recover to the original status.
3. Results
In order to prove the feasibility of the design method proposed in this paper, a manipulator prototype is developed and tested, as an example, by being mounted on a robot chassis [9]. The manipulator prototype rotates three joints with two motors which separate from the manipulator. Then, the shoulder joint can be added easily. This section will present the design results of the manipulator prototype and its experimental results.
3.1. The Manipulator Prototype as an Example for Applying the Design Method
The prototype includes three joints: a shoulder joint (), a wrist joint () and a scissors joint () (illustrated in Figure 17 and Figure 18a). The scissors joint is designed as an executive mechanism for finishing missions. The wrist joint is used for adjusting the angular posture of the scissors joint to ensure that the scissors aim at targets accurately. The shoulder joint can adjust the scissors joint’s height, and it can be added easily as in Figure 11. As a result, the switch motor and power motor are assembled on the robot chassis and separated from the manipulator. If the prototype can realize the motions mentioned above, the design method can be considered a suitable manipulator by two motors because the number of joints is more than the number of motors.
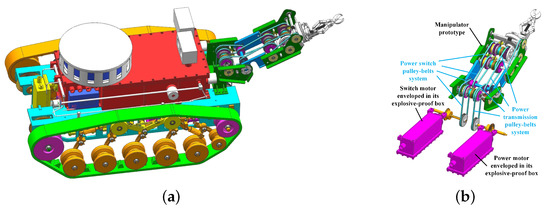
Figure 17.
A 3D model of the manipulator. (a) The manipulator is assembled on a mobile chassis. (b) The manipulator structure and its power transmission system.
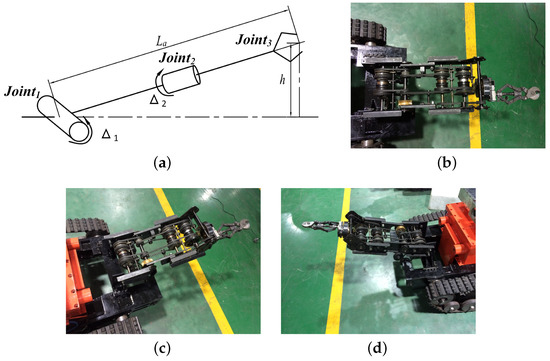
Figure 18.
In figure (a), represents the shoulder joint; represents the wrist joint; and represents the scissors joint. and represent the rotation angle of the shoulder and wrist joints, respectively; h represents the current height of the scissors; represents the length of the manipulator; the length of the prototype is 0.664 m. (b–c) show the manipulator prototype. (d) Left view of the manipulator prototype.
3.1.1. Shoulder Joint of the Manipulator Prototype
In order to maintain the posture of the shoulder joint without the power driven, the executive mechanism of the shoulder joint uses a worm component. The worm gear is fixed to the next arm relative to current arm (shown in Figure 19). When the worm is driven by Part 1 (in Figure 1) of the shoulder joint’s PSU through a pair of bevel gears, the next arm will rotate together with the worm gear. If the shoulder joint is not driven by the power motor, the worm component will still maintain its posture because of its own self-lock function.
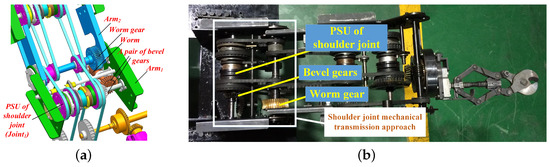
Figure 19.
Illustration of the shoulder joint. When the worm is driven by the power motor, the worm gear will be rotated together with the next arm. (a) The 3D model of shoulder joint. (b) The prototype of shoulder joint.
3.1.2. Wrist Joint of the Manipulator Prototype
The Figure 20 shows the structure of wrist joint. The executive mechanism of the wrist joint is also a worm component for maintaining the posture of the scissors joint by its own self-lock function when it is not driven by the power motor. The worm is driven by Part 1 of the wrist joint’s PSU by a pair of pulleys. The worm can drive the worm gear to rotate without limits.
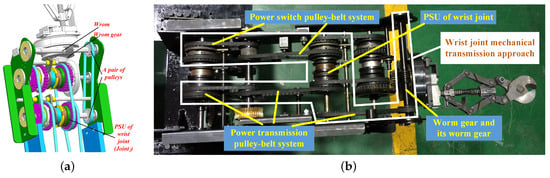
Figure 20.
Illustration of the scissors joint. The scissors joint (in ) is assembled on the worm gear which is driven by the worm. The power is transmitted from the transmission shaft (Part 1, driven by the power motor) of the PSU to the worm by a pair of pulleys. (a) The 3D model of wrist joint. (b) The prototype of wrist joint.
3.1.3. Scissors Joint of the Manipulator Prototype
To improve the ability of cutting cables and steel roll bars, the power is transmitted to the scissors joint by a pair of bevel gears from its own joint’s PSU (shown in Figure 21). The joint can cut or catch targets to clean the obstacles and carry out some other missions by changing the scissors to a suitable tool. The scissors (shown in Figure 22a) are driven by a thread screw which has two helix sections: the former is right-handed, and the other is left-handed (shown in Figure 22b). When the thread screw is turned in a clockwise direction, the two nuts will be close to each other, and the blades of the scissors will cut or catch a target. This joint can also maintain its posture by the self-lock function of the thread screw for holding targets. The scissors prototype in this paper can cut steel bars (diameter not more than 12 mm) and cables (diameter not more than 30 mm).
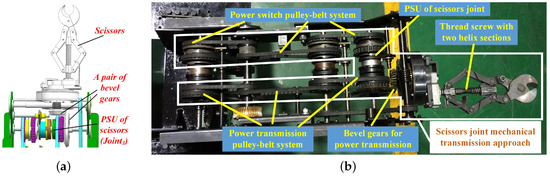
Figure 21.
Illustration of the scissor joint. (a) The 3D model of scissors joint. (b) The prototype of scissors joint.
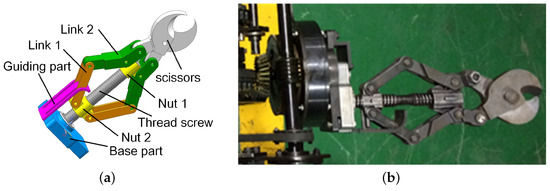
Figure 22.
Structure of the scissors [9]. (a) The 3D model of the scissors. (b) The prototype of the scissors.
3.1.4. Design of the Control System of the Manipulator Prototype
An illustration of the manipulator control system is shown in Figure 23. In order to drive the SPJ, SJC and SPP accurately, both motors have encoders. To choose motors [26,27,28], the work torque of the switch motor and the power motor should be estimated. Equations (8) and (9) can be used to calculate the working torque for the switch motor and power motor. Where is the reduction ratio from the switch motor to the cam, is the reduction ratio from the power motor to the SPP. Finally, the output rate torques of the chosen motor are 3.5 Nm (power motor) and 0.05 Nm. The reduction ratio from the switch motor to the cam is 480. The reduction ratio from the power motor to the shoulder joint is 720; the reduction ratio from the power motor to the wrist joint is 480; the reduction ratio from the power motor to the scissor joint is 1312. Because of the large reduction ratio of every joint in the manipulator prototype, the dynamic characteristics of the manipulator joint are not important and not obvious. The switch motor and power motor are enveloped in an explosive-proof box of their own (shown in Figure 24) for working in an underground coal mine which is an explosive environment. The other electrical components can be enveloped in the robot chassis’s electric box [9].
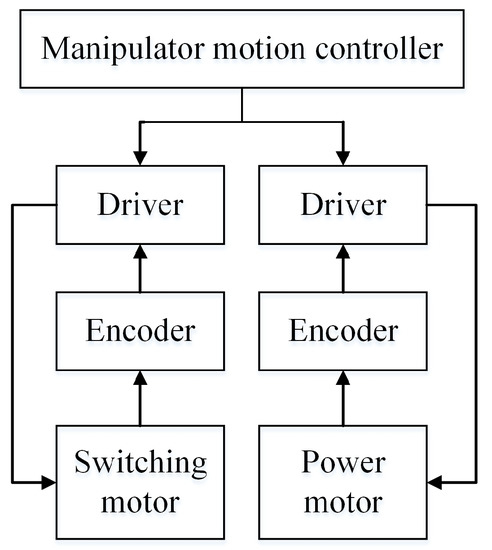
Figure 23.
Illustration of the manipulator control system.
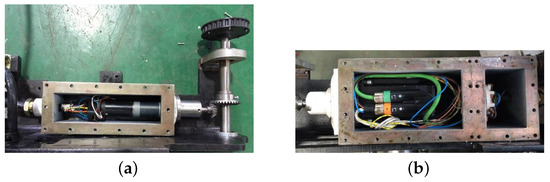
Figure 24.
The motors are enveloped in their explosive-proof boxes. (a) The swich motor with its explosive-proof box. (b) The power motor with its explosive-proof box.
3.2. Experiment
This section will present the experiments of the manipulator prototype, including the PSU, shoulder joint, wrist joint, and scissor joint on a table (shown in Figure 25). Furthermore, the manipulator prototype is assembled on the mobile chassis and tested in an underground coal mine environment to test its security in an explosive environment.
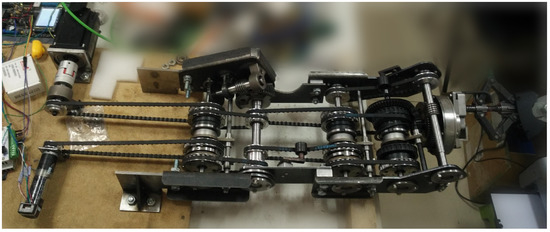
Figure 25.
The manipulator is tested on a table.
3.2.1. Experiment of the PSU
The PSU is tested on an experimental table (shown in Figure 26). It can be driven accurately to switch power on and off. Figure 26 shows that Part 11 and Part 12 are meshed by Part 7 (SPC) pushing Part 8 (SPF). At this time, Part 5 (SJC) is pushed by Part 16 (SJF) and Part 4 is separated from Part 3. So the PSU is in switched on status and is ready to service the power motor to drive the joint.
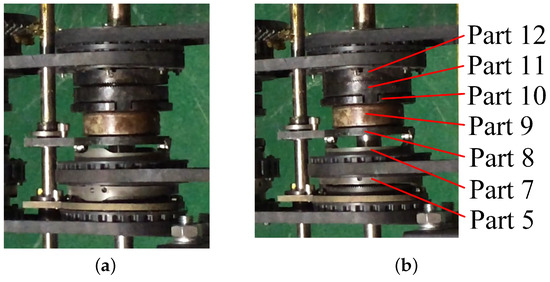
Figure 26.
The experiment of the PSU. (a) The PSU is in switched off status. (b) The PSU is in switched on status.
3.2.2. Experiment of the Shoulder Joint
The experiment of the shoulder joint is shown in Figure 27. The shoulder joint bears the largest load among the three joints. The mass distribution is shown in Figure 27a. The shoulder joint can bear about 112.5 Nm (shown in Figure 27b). and the detailed parameters are listed in Table 1.
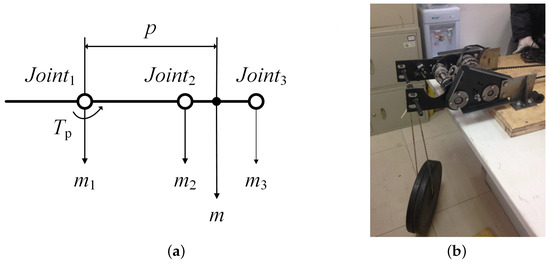
Figure 27.
The experiment of the shoulder joint. (a) The load illustration of the shoulder joint. (b) The experiment of the shoulder joint on a table [9].

Table 1.
General parameters of the manipulator. represents the mass of the shoulder joint; represents the mass of the wrist joint; represents the mass of the scissors joint; m represents the mass of the manipulator; p represents the location of the mass center; represents the maximum torque that the shoulder joint can bear; represents the motion range of the shoulder joint.
Table 1.
General parameters of the manipulator. represents the mass of the shoulder joint; represents the mass of the wrist joint; represents the mass of the scissors joint; m represents the mass of the manipulator; p represents the location of the mass center; represents the maximum torque that the shoulder joint can bear; represents the motion range of the shoulder joint.
| Items | Values | Units | Items | Values | Units |
|---|---|---|---|---|---|
| 7.5 | kg | p | 0.361 | m | |
| 7.5 | kg | 112.5 | Nm | ||
| 5.5 | kg | −20 to 90 | deg | ||
| m | 20.5 | kg |
3.2.3. Experiment of the Wrist Joint
The wrist joint is used for adjusting the posture angle of scissors to aim at the targets for cutting or catching. During the experiment (shown in Figure 28), the wrist joint can rotate smoothly. The worm and its gear can maintain its posture stably. The scissors can be driven to rotate counterclockwise or clockwise without limits. The joint can bear about 50 Nm.
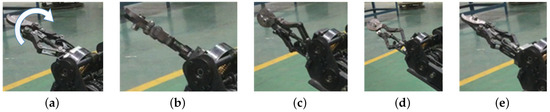
Figure 28.
(a–e) show the process of the scissors rotating 360 deg counterclockwise, which is driven by the wrist joint [9].
3.2.4. Experiment of the Scissors Joint
The scissors joint, cutting cable and a steel roll bar, is shown in Figure 29. The cutting speed of the manipulator is not very quick because the reduction ratio of the scissors reducer is very large. Therefore, the working ability of the scissors is sufficient.
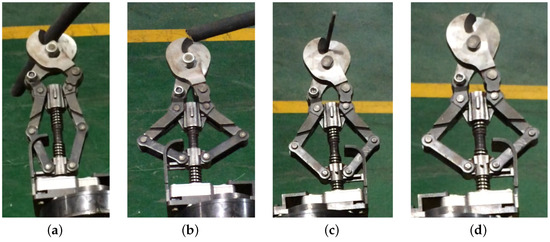
Figure 29.
The cutting performance of the scissors joint assembly unit; (a–b) scissors cutting cable; (c–d) scissors cutting a steel roll bar.
3.2.5. Experiment of the Manipulator
The manipulator is assembled on a robot chassis and tested in a coal mine and Rescue Team Center in Datong, Shanxi Provence, China (shown in Figure 30 and Figure 31) [9]. The manipulator is controlled remotely to finish cutting the cable and steel roll bar during the experiment. If the cables are tightened, the scissors can aim at them easily. When the cable and roll bar are swaying, the operator would spend more time adjusting the scissors to aim at them. When cutting the steel wire ropes, more time is required unless they are tightened.
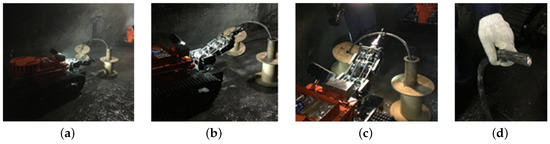
Figure 30.
(a–d) show the manipulator prototype assembled on a mobile chassis and cutting out a cable controlled remotely [9]. (a) shows the manipulator preparing to aim at the cable. (b) shows the scissors aimed at the cable. (c) shows the scissors cutting the cable. (d) shows the cable being cut by the scissors.
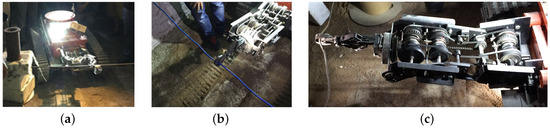
Figure 31.
(a–c) show the manipulator cutting the steel roll bar, a thin cable and a steel tire operated remotely in the training center [9].
When the shoulder joint rotates to , the scissors will touch the ground. Due to the shoulder joint driving and which are about 13 kg, the worm should be given enough power to activate the shoulder joint. In the experiment, the power motor speed should be operated in the range of 850 to 1100 rpm to drive the worm of the shoulder joint. Furthermore, the power motor should below 600 rpm when the shoulder joint descends the manipulator.
3.3. Summarized
- The belts and pulleys used for the manipulator are made of flame-retardant rubber and nonmetallic material which are tested as antistatic materials, and all the other parts are made of steel. As such, the manipulator can ensure security when working in an explosive environment.
- The manipulator is mounted on a robot chassis for cleaning obstacles. It can be swung left and right by the mobile chassis turning left and right. So, it will help the scissor to conveniently aim at targets.
- The three manipulator joints in our paper are not parallel, as shown in Figure 18a. The shoulder joint and wrist joint are orthogonal, and the wrist joint and scissors joint are also not parallel, because the scissors are a linkage mechanism. Then, the shoulder joints can be added easily, because they are parallel joints (the adding method can be seen in Figure 10). The wrist joint cannot be added easily among shoulder joints. The scissor joint does not need to added.
- The switch motor and power motor are separated from the manipulator and assembled on the mobile chassis and their weights are 5.5 kg and 12 kg together with their explosive-box. So, the effect of reducing the manipulator weight by the design method proposed in this paper is obvious. In addition, the motor cables for driving manipulator joints are not assembled on the manipulator. If every joint had a driving motor, the cable of the scissors joint motor would catch fire and the battery would be destroyed when the scissors work in a high temperature environment.
- The manipulators that used the pneumatic drive method will be loose because the gas in the pneumatic cylinder can be compressed like a spring when the robot chassis is moving, which will make it difficult for the scissors joint to aim at the targets. On the other hand, the gas discharged by the pneumatic cylinder may influence the explosive environment. The manipulators that used the hydraulic drive method should protect their hydraulic tubing from being seriously damaged when they work in a high temperature environment. Furthermore, the assembly of the hydraulic pump is a big problem for designers. Therefore, the manipulator in this paper can be more conveniently and securely assembled on a robot or other mobile chassis than others that used the pneumatic and hydraulic drive method.
3.4. Practical Procedure
In practice, the design of explosive-proof manipulators that used the design method in this paper requires the following steps.
- Design the PSU for transmitting and switching power among joints of the manipulator; the work radius of clutches SJPM and SJPS in this paper is determined by the cams’ SJC and SPC requirements; it can be changed according readers’ environment requirements.
- Design the cams’ SJC and SJC for switching on/off the power and separating from the next arm of the manipulator.
- Accumulate the spring stiffness , and of the PSU.
- Design the mechanical transmission mechanism for the whole manipulator.
4. Discussion
- The height of the manipulator prototype can be reduced by reducing the volumes of the PSU and the other parts, such as the worm component and bevel gears.
- When the SJC is pushed by SJF, the phase difference will occur if SJC does not return along the original direction. So, the controller should plan the switch program to compensate for the phase difference.
- If the manipulator adds a shoulder joint as a pitch joint between the shoulder joint and wrist joint ( and ), the pitching angle of the scissors can be adjusted and can aim at valves for opening and closing.
- The three joints cannot move at the same time. If they could, the motion among the three joints must be constant and they would not be not flexible enough to clean obstacles, such as cables and steel roll bars.
- During the cutting of cables and steel roll bars by scissors, the speed is not quick enough because of the large reduction ratio. In order to clean obstacles powerfully, the cutting speed can be considered secondary. However, it will be improved in future work.
- The scissors joint can replace other tools for cleaning obstacles, and it will be designed for switch valves to carry out search-and-rescue in gas-leak environments.
- In the future, the control and communication method between the manipulator and the remote control center, the dynamical network interactions [29], simple fuzzy controller [30] and single PD plus gravity compensation control [31] will be good choices.
5. Conclusions
This paper presented a design method for helping designers to develop manipulators which can be used for search-and-rescue in an explosive environment with the ability to add joints conveniently. Furthermore, the manipulator only uses two motors which can be separated from the manipulator and mounted on the robot chassis. So, the two motors can be protected comprehensively without worrying about assembly on the manipulator. Generally speaking, the development of this design method can provide a reference for developing future search-and-rescue missions in an explosive environment.
6. Patents
There are two patents (CN204997668U and CN104924303A) that resulted from the work reported in this paper.
Author Contributions
Jingchao Zhao conceived the idea and designed all the experiments under the direction of Junyao Gao. Jingchao Zhao wrote and Junyao Gao revised the paper. Fangzhou Zhao, Zhe Xu and Yi Liu participated in the robot manufacturing and experiments with Jingchao Zhao.
Acknowledgments
This work is supported by the National High Technology Research and Development Program of China (No.2012AA041504, No.2015AA042201); B2220132014.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| PSU | Power Switch Unit |
| Power motor | The motor for supplying the power for joint rotation. |
| Switch motor | The motor for switching power among all the joints. |
| Group A | The Group A (shown in in Figure 1) are used for switch the power among joints. |
| Group B | The Group B (shown in in Figure 1) are used for switch the power among joints. |
| Group C | The parts in Group C (shown in in Figure 1) are used for transmitting the power from the motor to the current joint. |
| Group D | The parts in Group D (shown in in Figure 1) are used for transmitting the power from the power motor to the current joint. |
| SJC | Part 5 in Figure 1, the cam used for switching power among joints. |
| SJPS | Part 2 in Figure 1, the slave pulley used for transmitting rotation of switch motor. |
| SPC | Part 7 in Figure 1, the cam used for transmitting power to the current joint. |
| SJPM | Part 6 in Figure 1, the master pulley used for switching power among joint. |
| SPF | Part 8 in Figure 1, the cam follower of the Part 7. |
| SJF | Part 16 in Figure 1, the cam follower for the Part 5. |
| s | In Equation (1), the height of the cam work area and it is also the linear displacement of the SPC and SJF. |
| – | The height of the cam work area and it is also the linear displacement of the SPC and SJF in the 8 segments. |
| h | The maximum height of the cam wrok area. |
| The maximum height of the and of the cam law curve. | |
| The maximum height of the and of the cam law curve. | |
| The angular position of the cam, in the region of 0 to . | |
| – | The partition point of – segments in whole region. |
| v | The linear velocitiy of the SPC and SJF along their axis direction. |
| – | The linear velocity of the SPC and SJF in the 8 segments along their axis direction. |
| r | The working radius of the cam. |
| The angular velocity of the cam. | |
| a | The linear acceleration of the SPC and SJF along their axis direction. |
| – | The linear acceleration of the SPC and SJF in the 8 segments along their axis direction. |
| The pressure angle between the cam its follower. | |
| – | The pressure angle between the cam its follower in the 8 segments. |
| The force of SPF pushed by SPC. | |
| The force of SJC pushed by SJF. | |
| The spring stiffness coefficient of Part 22. | |
| The spring stiffness coefficient of Part 24. | |
| The spring stiffness coefficient of Part 19. | |
| The dynamic friction coefficient between the cam and its followers. | |
| The preload of spring (Part 22) | |
| The preload of Spring (Part 24) | |
| The torque of switch motor for working | |
| The torque of power motor for working | |
| DOF | Degree of Freedom. |
References
- Fukushima Nuclear Disaster Rescue in 2011. Available online: http://www.sanyglobal.com/csr.html (accessed on 20 December 2017).
- Wolf, A.; Choset, H.H.; Brown, B.H.; Casciola, R.W. Design and control of a mobile hyper-redundant urban search and rescue robot. Adv. Robot. 2005, 19, 221–248. [Google Scholar] [CrossRef]
- Wei, B.; Gao, J.; Zhu, J.; Li, K. (Eds.) Design of a Large Explosive Ordnance Disposal Robot. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology & Automation, Changsha, China, 10–11 October 2009; Volume 3. [Google Scholar]
- Motaleb, A.K.B.; Hoque, M.B.; Hoque, M.A. (Eds.) Bomb disposal robot. In Proceedings of the 2016 International Conference on Innovations in Science, Engineering and Technology (ICISET), Dhaka, Bangladesh, 28–29 October 2016. [Google Scholar]
- Sandia National Laboratories: News Releases: Sandia Labs’ Gemini-Scout Robot Likely to Reach Trapped Miners Ahead of Rescuers. Available online: https://share-ng.sandia.gov/news/resources/news$_$releases\/miner-scou/$#$.WK46z1V95pg (accessed on 26 May 2015).
- Wang, W.; Dong, W.; Su, Y.; Wu, D.; Du, Z. Development of Search-and-rescue Robots for Underground Coal Mine Applications. J. Field Robot. 2014, 31, 386–407. [Google Scholar] [CrossRef]
- Yu-tan, L.; Hua, Z.; Meng-Gang, L.; Peng, L. A novel explosion-proof walking system: Twin dual-motor drive tracked units for coal mine rescue robots. J. Cent. South Univ. 2016, 23, 2570–2577. [Google Scholar]
- Novák, P.; Babjak, J.; Kot, T.; Olivka, P.; Moczulski, W. Exploration Mobile Robot for Coal Mines. In Modelling and Simulation for Autonomous Systems; Hodicky, J., Ed.; LNCS sublibrary: SL 3—Information Systems and Applications, Incl. Internet/Web, and HCI; Springer: Cham, Switzerland, 2015; Volume 9055, pp. 209–215. [Google Scholar]
- Zhao, J.; Gao, J.; Zhao, F.; Liu, Y. A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment. Sensors 2017, 17, 2426. [Google Scholar] [CrossRef] [PubMed]
- Kamezaki, M.; Hashimoto, S.; Iwata, H.; Sugano, S. (Eds.) Development of a dual robotic arm system to evaluate intelligent system for advanced construction machinery. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010. [Google Scholar]
- Liyanage, M.H.; Krouglicof, N.; Gosine, R. (Eds.) Design and control of a high performance SCARA type robotic arm with rotary hydraulic actuators. In Proceedings of the 2009 Canadian Conference on Electrical and Computer Engineering, St. John’s, NL, Canada, 3–6 May 2009. [Google Scholar]
- PLC Control for Pneumatic Pick and Place Robot-YouTube. Available online: https://www.youtube.com/watch?v=8ZiVKduLUkY (accessed on 16 August 2015).
- Maeda, S.; Tsujiuchi, N.; Koizumi, T.; Sugiura, M.; Kojima, H. Development and Control of a Pneumatic Robot Arm for Industrial Fields. Int. J. Adv. Robot. Syst. 2012, 9, 59. [Google Scholar] [CrossRef]
- Tondu, B.; Ippolito, S.; Guiochet, J.; Daidie, A. A Seven-degrees-of-freedom Robot-arm Driven by Pneumatic Artificial Muscles for Humanoid Robots. Int. J. Robot. Res. 2005, 24, 257–274. [Google Scholar] [CrossRef]
- The Robot-Arm Prosthetic Controlled by Thought-YouTube. Available online: https://www.youtube.com/watch?v=sk1NkWl$_$W2Y (accessed on 12 November 2015).
- Madhani, A.J. Robot Hand with Humanoid Fingers. U.S. Patent No. 8,052,185, 14 October 2011. [Google Scholar]
- Yoshida, K.; Hashizume, K.; Abiko, S. (Eds.) Zero reaction maneuver: Flight validation with ETS-VII space robot and extension to kinematically redundant arm. In Proceedings of the Proceedings 2001 ICRA IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Korea, 21–26 May 2001; Volume 1. [Google Scholar]
- Kasprzyczak, L.; Trenczek, S.; Cader, M. Robot for monitoring hazardous environments as a mechatronic product. J. Autom. Mobile Robot. Intell. Syst. 2012, 6, 57–64. [Google Scholar]
- Yu, Z.; Huang, Q.; Ma, G.; Chen, X.; Zhang, W.; Li, J.; Gao, J. Design and Development of the Humanoid Robot BHR-5. Adv. Mech. Eng. 2014, 6, 852937. [Google Scholar] [CrossRef]
- Today’s Technology Needs Tomorrow’s Heroes-YouTube. Available online: https://www.youtube.com/watc\h?v=xqriTomnOeI (accsessed on 5 July 2015).
- Russia: EMERCOM Enlist Robots to Help After Vorkuta Mine Explosions-YouTube. Available online: https://www.youtube.com/watch?v=OHH1p3$_$Zs2w (accessed on 29 February 2016).
- Beira, R.; Clavel, R.; Bleuler, H. Mechanical Manipulator for Surgical Instruments. U.S. Patent Application No. 13/878,924, 14 November 2013. [Google Scholar]
- Salisbury, J.K.; Townsend, W.T. Compact Cable Transmission with Cable Differential. U.S. Patent No. 5,207,114, 4 May 1993. [Google Scholar]
- Robot Arm on How It’s Made-YouTube. Available online: https://www.youtube.com/watch?v=tkDbmWAy\HYw (accessed on 3 March 2008).
- ABB Robotics-Weldguide IV-YouTube. Available online: https://www.youtube.com/watch?v=80cNPwtKH7\A (accessed on 21 March 2016).
- De Straete, H.J.; Degezelle, P.; De Schutter, J.; Belmans, R.J.M. Servo motor selection criterion for mechatronic applications. Appl. Sci. Technol. 2001, 3, 43–50. [Google Scholar] [CrossRef]
- Giberti, H.; Cinquemani, S.; Legnani, G. Effects of transmission mechanical characteristics on the choice of a motor-reducer. Mechatronics 2010, 20, 604–610. [Google Scholar] [CrossRef]
- Roos, F.; Johansson, H.; Wikander, J. Optimal selection of motor and gearhead in mechatronic applications. Mechatronics 2006, 16, 63–72. [Google Scholar] [CrossRef]
- Buscarino, A.; Fortuna, L.; Frasca, M.; Rizzo, A. Dynamical network interactions in distributed control of robots. Chaos Interdiscip. J. Nonlinear Sci. 2006, 16, 015116. [Google Scholar] [CrossRef] [PubMed]
- Zheng, C.; Su, Y.; Mercorelli, P.; Zheng, C.; Su, Y.; Mercorelli, P. A simple fuzzy controller for robot manipulators with bounded inputs. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany, 3–7 July 2017; pp. 1737–1742. [Google Scholar]
- Su, Y.; Zheng, C.; Mercorelli, P. A single PD plus gravity compensation control for global asymptotic regulation of robot manipulators with actuator constraints. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany, 3–7 July 2017; pp. 130–135. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).