Abstract
In the semiconductor industry, positioning accuracy and acceleration are critical parameters. To improve the acceleration speed of a motor, this paper proposes the moving-coil maglev planar motor with a concentric winding structure. The coordinate system has been built for the multiple degrees of freedom movement system. The Lorenz force method has been applied to solve its electromagnetic model. The real-time solving of the generalized inverse matrix of factors can realize the decoupling of the winding current. When the maglev height changes, the electromagnetic force and torque decreases exponentially with the increase of the air gap. To decrease the influence on control system performance by the internal model change and the external disturbance, this paper proposes an improved active disturbance rejection control (ADRC) to design the controller. This new controller overcomes the jitter phenomenon due to the turning point for the traditional ADRC, thus it is more suitable for the maglev control system. The comparison between ADRC and the improved ADRC has been conducted, the result of which shows the improved ADRC has greater robustness.
1. Introduction
Lithography is the most important and complicated aspect in integrated circuit manufacturing; the manufacturing accuracy determines the integration degree and performance of the manufactured chip. The highly-accurate two-dimensional stepper is the core element of lithography. The two-dimensional stepper driven directly by the maglev permanent magnet planar motor has many advantages, such as quick response, high accuracy, and simple structure [1,2,3,4]. It can also work in a vacuum environment, which can meet the requirement of next-generation ultraviolet lithography technology [5,6]. Thus, it has caught the attention of many researchers in the field of high-accuracy planar directly-driven lithography [7,8,9,10,11,12].
High thrust density is a very important factor in the design of the planar motor to achieve the goal of high acceleration. Meanwhile, the simple winding structure is needed for easy manufacturing. Therefore, a maglev core-less planar motor adopting the concentric winding structure is proposed in this paper. The most common structure of the primary of the planar motor consists of multiple sets of rectangular windings and the windings are deviated 90 degrees from each other [13]. The proposed maglev planar motor adopts concentric windings with a square structure. The primary section of the motor uses the same windings and they are arranged as a matrix. This motor has many advantages, such as high winding utilization rate, good dynamic performance, and no cogging force [14], thus a motor of this structure is very suitable for the application in high-accuracy two-dimensional movement. Meanwhile, the effective winding length is increased in the concentric winding structure. Thus, on the condition that the whole system is controllable, fewer phases are needed for the same mover area, reducing the required number of drive units accordingly. This is another significant advantage of the proposed concentric winding structure.
The electromagnetic model of the traditional rectangle winding is simple, but its short edge will not generate a horizontal force. As a result, to make this planar motor possible, other sets of rectangular windings rotated 90 degrees are needed [15,16], while the concentric winding in the proposed maglev planar motor adopts the square structure. The square structure leads to a more complex electromagnetic model and, therefore, the decoupling control of the current in the concentric winding is important for realizing the high-precision control of the whole drive system. It has to be controlled in six degrees of freedom because of the active magnetic bearing, even though the planar motor mover can only move relatively small distances in the x-y plane. Therefore, the maglev permanent magnet synchronous planar motor control system is a strong coupling, nonlinear, and multivariable system because the motion of the mover has multiple degrees of freedom and the magnetic field produced by the permanent magnet decreases nonlinearly in the vertical direction.
The classical PID controller is the most commonly used controller in industrial automation for its simple structure, high stability, high reliability, simple adjustment, etc. The extra external cable disturbance can impact the performance of the planar motor directly; therefore, the external disturbance force needs to be considered when designing the control system [17,18]. To solve this problem, active disturbance rejection control (ADRC) is proposed for designing the controller [19,20,21]. ADRC has low requirements for the modeling accuracy and it can observe the disturbance in multiple degrees of freedom through the extended state observer and implement compensation for it. Thus, it has been widely used in the control field.
The maglev planar motor system is a complex, multi-input, multi-output coupling system. The active disturbance rejection control (ADRC) is very suitable for this system because it demands a relatively low modeling accuracy, and the extended state observer can observe the coupling disturbance in different degrees of freedom. Thus, the compensation can be achieved to decrease the influence of the disturbance. The damping for the maglev system is close to 0, which requires the controller to realize smooth control for stability. The nonlinear function curve of the traditional ADRC inevitably causes the system jitter. The new nonlinear function can make the ADRC controller more suitable for the maglev system.
First, this paper explains the working principle of the moving-coil maglev planar motor with the winding structure, and then solves the planar motor electromagnetic model decoupling. Second, an improved active disturbance rejection control (ADRC) is designed, considering the control characteristic of the maglev planar motor. Finally, the disturbance is imposed on the traditional and advanced controllers, respectively, to test their robustness to random disturbance.
2. Motor Structure and Working Principle
2.1. Structure
Figure 1 shows the core-less moving-coil maglev permanent magnet planar motor which has the concentric winding structure. It consists of a mover, a stator, and the gap between them. The mover consists of the base plate and the winding array, and the stator consists of the yoke plate and the permanent magnet array. The winding array on the mover is made of 16 concentric windings, which are arranged as a 4 × 4 matrix. The distance between the adjacent winding centers is 6.5 times the pole pitch, which is the pole pitch of the permanent magnet array. An independent drive unit is applied to each set of the windings and power is supplied by cables. The stator permanent magnet is arranged in a Halbach structure, which can increase the flux density near the coils.
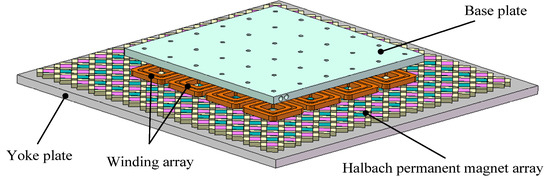
Figure 1.
The maglev planar motor structure.
2.2. Working Principle
The working principle of the proposed planar motor is described as follows: The permanent magnet generates a magnetic field, in which the windings with current in them will generate electromagnetic force and electromagnetic torque. There is no constraint on the motor mover, thus the mover can move in six degrees of freedom. The electromagnetic force and torque on the winding are not only related to the current in it, but also influenced by the relevant position change between the stator and the mover. To realize the full control of the movement in six degrees of freedom, all of the windings on the mover need to be controlled properly. After the 16 windings are fixed to the mover, the position of the 16 windings relevant to the stator can be known by the relevant position between the mover and the stator. Thus, the relationship between the electromagnetic forces (and torques) and the respective current in the winding can be derived. Through the decoupling calculation, we can obtain the needed current in each winding for the expected forces and torques. Therefore, the multiple-degrees-of-freedom control of the proposed maglev planar motor can be realized.
3. Electromagnetic Model and Current Decoupling
3.1. Electromagnetic Model Analysis
3.1.1. Parameter and Coordinate Definition
Figure 2 shows the model of the concentric winding in the Halbach magnetic field. This can be seen from Figure 2 that one set of concentric windings consists of the outer and inner coils. They are connected in series, but the currents circulating in them are in opposite directions. To simplify the calculation, each of them is simplified into four different cuboids. τn is the pole pitch; lw is the equivalent linear length of the outer coil; ln is the equivalent linear length of the inner coil; wc is the coil width; hc is the coil height; and ct and cb are the height coordinate positions of the coil.
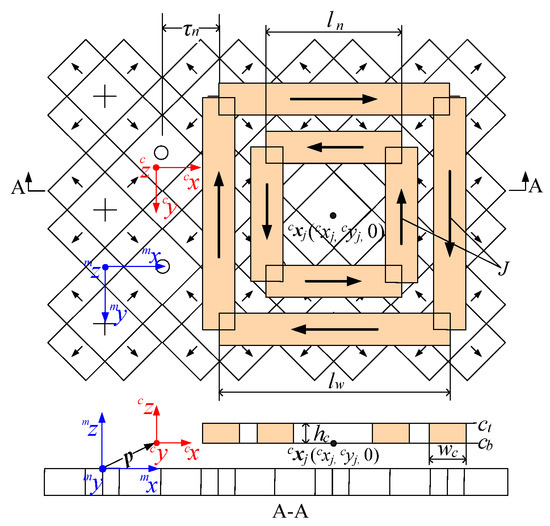
Figure 2.
Top views and A-A view of the components of a maglev planar motor: a Halbach array and a concentric structure winding.
Two different coordinate systems are defined in Figure 2. The first one is the stator global coordinate system denoted with the superscript m, which is fixed on the top face of the stator permanent magnet. It can be expressed as:
The second one is the mover local coordinate system denoted with the superscript c, which is fixed on the mover bottom surface center. It can be expressed as:
The coordinate position of the j-th winding center in the mover local coordinate system can be expressed as:
The position vector transformation between the mover local coordinate system and the stator global coordinate system is expressed as:
3.1.2. Magnetic Flux Density Distribution
In general, only the first harmonic component is taken into account in the maglev planar motor force and torque analytic model to realize the fast calculation. In Figure 2, under the stator global coordinate system the permanent magnet magnetic flux density function [13,22] is shown as:
where Bxy and Bz are the magnetic flux density in the horizontal and vertical, respectively.
The magnetic flux density function in the global coordinate system can be transformed into that of the mover local coordinate system, and it is expressed as:
where:
Combining Equations (5) and (6), we can obtain the magnetic flux density function in the mover local coordinate system, shown as:
3.1.3. Electromagnetic Force and Torque
According to Lorenz’s law of force, the electromagnetic force and torque on the winding can be derived as:
where B is the magnetic flux density of the magnet array , J is the volume current density in the coil, V is the volume of the coil, and r is the vector from the point about which the torque is calculated.
In the model of Figure 2, the winding can be simplified into four cuboids, and the volume current J can be equated into the surface current Js. The volume integral of the force and torque can be split into an integral over cz and a surface integral over cx and cy. In the mover local coordinate system, the electromagnetic force and torque can be derived as:
where:
and crz is the equivalent force arm in the cz-direction.
The positive current direction is assumed the same as the positive axis direction. The methods to calculate the forces on the inner and outer coils are the same. Taking the outer coil as an example, the force and torque can be calculated as:
Solving Equations (14) and (15), we can obtain the forces and torques on the winding as follows:
where:
3.2. Current Decoupling
From the system perspective, the input of the motor drive system is the current in each of the 16 windings, and the output is the force and torque in the six degrees of freedom. It is a multi-input and multi-output coupling system. Thus, the decoupling current control of each winding is particularly critical to realize the overall performance of the control system. In the proposed maglev planar motor, there are 16 sets of independent windings. Each set of windings can generate the forces and torques in different directions. The total force and torque on the mover mass center can be seen as the sum of those on the 16 sets of windings. The electromagnetic force and torque on each set of winding can be expressed as:
Based the above derived electromagnetic force and torque equation, the relation of them with the current can be expressed as:
where p is the position vector and K(p) is a coefficient matrix about the electromagnetic force and torque relevant to the position.
It can be seen from Equation (25) that the forces and the torques can be calculated when the current in the winding is known. In practical control, however, the current in each winding needs to be derived based on the expected forces and torques. The currents can be derived through the generalized inverse matrix method. In general, more than one answer can be obtained in the above process. To get only one answer for the practical control, we still need to add extra constraints. The heat loss has a significant impact on the performance of the control system and, therefore, we choose the answer that can generate the least heat loss. This extra constraint is expressed as:
The Moore-Penrose generalized inverse matrix of K(p) is shown as:
Thus, we can derive the current in each winding as:
From Equation (30) the needed current in each winding to obtain the desired forces and torques can be derived, and the derived current is the input of the maglev planar motor.
3.3. Dynamics Model
The dynamics model of the mover can be seen as linear. It can be simply expressed as:
where m is the mover mass; g is the gravitational acceleration; Ix, Iy, and Iz are the rotary inertia.
4. Control System Design
4.1. Control System Structure
To realize the control on the six degrees of freedom for the maglev planar motor control system, the closed loop control for each degree of freedom is needed. After adopting the above decoupling method to decouple the winding current, the six position inputs can control the six outputs independently with an independent controller, respectively, as shown in Figure 3a. In Figure 3a, pref is the given position vector; Wref is the needed force and torque on each degree of freedom; iref is the needed current in each of the 16 windings; W is the generated forces and torques on the six degrees of freedom; s is the disturbance on each degree of freedom; and p is the displacement vector of the planar motor.
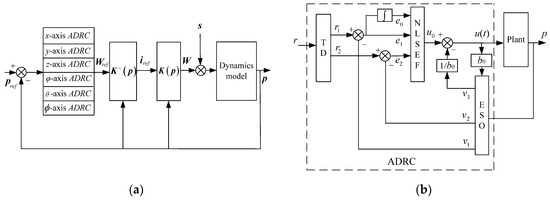
Figure 3.
Control system diagram: (a) control system structure of the maglev planar motor; and (b) configuration of a second-order ADRC.
ADRC is an advanced new non-linear control technology developed in recent years based on the nonlinear PID control [23,24,25]. ADRC mainly consists of a tracking differentiator (TD), extended state observer (ESO), and nonlinear states error feedback (NLSEF). To realize the position parameter adjusting, this paper adopts the second-order ADRC controller shown in Figure 3b.
4.2. ADRC Controller Design
A TD is used to handle the transient process and obtain the differential signal. This paper adopts the fastest discrete state observer and the algorithm is shown as:
where r is the input signal, r1 is the tracking signal of r, r2 is the differential signal of r1, and R is the speed factor.
The ESO is the core part of the ADRC. The function of it is to estimate the object state based on the system output. The system external disturbance and the model internal disturbance are treated as the total disturbance; ESO can observe the extended state of the nonlinear uncertain object to realize the feedback control and disturbance compensation. The second-order ADRC adopts the third-order ESO, the mathematic model of which is shown as:
where p is the system output, v1 is the tracking signal of p, v2 is the differential signal of v1, v3 is the tracking signal of the system disturbance, ε is the deviation signal, b0 is the disturbance compensation coefficient, u(t) is the compensation control input, α is the nonlinear factor, and δ is the filtering factor (δ > 0).
The nonlinear factor α is normally 0.5, 0.25, or 0.125. The parameters β1, β2, and β3 are determined by the sampling step. They can be set as:
where h is sampling step length.
The core point of the feedback is to eliminate the deviation through the deviation feedback. NLSEF adopts the deviation nonlinear combination instead of the linear combination in the traditional PID, which can increase the control accuracy of the control system. The algorithm is shown as:
where k0, k1, and k2 are the deviation, differential, and integration gains, respectively.
4.3. Improved ADRC Controller
In the traditional ADRC, the function fal(•) is shown as Equation (37). When δ is equal to 0.3, and α is equal to 0.3, 0.4, and 0.5, the characteristic of the function fal(•) is shown in Figure 4a. fal(•) is a nonlinear function; the gain decreases when the deviation increases. It can be seen from Figure 4a that the function fal(•) characteristic curve is not smooth with turning points. A lot of simulation result has shown that this non-smooth characteristic will cause the vibration.
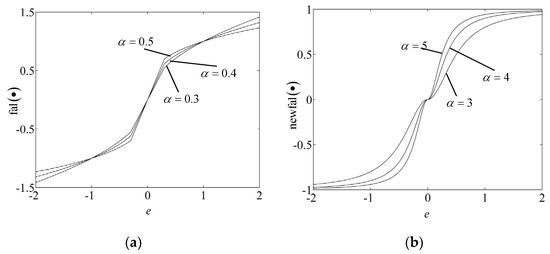
Figure 4.
Function characteristic curve: (a) the characteristic curve of function fal(•) varied with when ; and (b) the characteristic curve of function newfal(•)varied with when .
It can be seen from Equation (13) that the electromagnetic force and torque decrease exponentially with the increase of the relative air gap height. Thus, the stable control of the air gap height is essential for the planar motor performance. Considering the electromagnetic force and torque characteristics of the maglev planar motor, this paper proposes a new function newfal(•), which is shown in Figure 4b. For the new function, the deviation decreases with the increase of the gain; the characteristic curve is also very smooth. The new function is shown as:
where , , and are the adjusting factors.
5. Validation and Analysis
The calculation results of this electromagnetic model can be validated by using the harmonic model [26,27], and the characteristics of the control system are verified in MATLAB/Simulink (2014a, Mathworks, Natick, MA, USA)with motor parameters shown in Table 1. There are three main purposes for the validation. The first is to validate the electromagnetic model. The second is to validate the decoupling control of the improved ADRC. The third is to compare the control performance of the improved ADRC and the traditional ADRC when there is an external disturbance.

Table 1.
The planar motor parameters.
5.1. Electromagnetic Model Validation
The computation model of the maglev planar motor is verified by comparison with the harmonic model. The harmonic coefficient is set to be 1, the current of ±1 A is imposed on certain groups of windings and the range of motion is set be ±37.56 mm in both x and y direction.
The peak values calculated by the harmonic model are 59.78 N for Fx and Fy, 119.56 N for Fz, 7.47 N·m for Tx and Ty, and 2.49 N·m for Tz. It can be seen from Figure 5 that the error of the deduced model of the maglev planar motor in this paper is minor, and the maximum of the error is 1.33% for the force and torque. Compared with the well-known harmonic model, the proposed model has high accuracy and can easily realize practical application, as well.
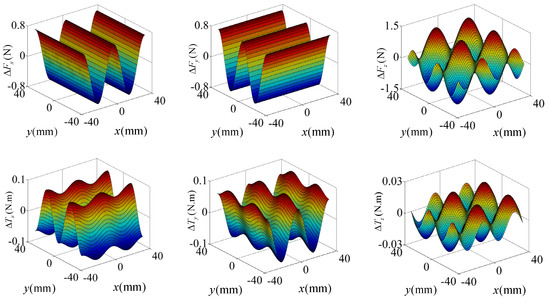
Figure 5.
The force and torque errors between the deduced model and the harmonic model.
5.2. Decoupling Validation
The position step signal is given as the reference signal into the six inputs of the control system, respectively. The decoupling can be validated by observing the influence of one input reference signal on the other five degrees of freedom. The simulation time is set to be 0.07 s. One millimeter or 1 mrad is given as the reference signal and they are provided at 0 s, 0.01 s, 0.02 s, 0.03 s, 0.04 s, and 0.05 s, respectively. The simulation result is shown in Figure 6.
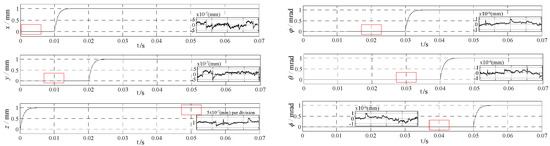
Figure 6.
The displacement/angle curve with step response.
It can be seen from the simulation result that when the position of each axis changes, other sets of axes show little fluctuation. For instance, when the y-axis increases from 0 mm to 1 mm at 0.02 s, the position of φ-axis fluctuates between 10−6 mm intervals according to its angle curve with step response. When φ-axis increases from 0 mrad to 1 mrad at 0.03 s, the position of θ-axis fluctuates between 10−6 mm intervals seen from its angle curve with step response. Thus, it can be seen that the output of each degree of freedom only responds to its respective input and, thus, the decoupling of the proposed developed ADRC is validated.
5.3. Disturbance Analysis
To compare the performance under external disturbance of the improved ADRC and the traditional ADRC controller, a random disturbance with the amplitude of 10 N or 1 N·m is put into the control system. The simulation time is set to be 0.1 s; the six reference signals are all kept constant at 0. The simulation result is shown in Figure 7.

Figure 7.
Position response curve: (a) the response curve under external disturbance with ADRC; and (b) the response curve under external disturbance with improved ADRC.
It can be seen from Figure 7 that under the random external disturbance, the position fluctuation for the developed ADRC is much smaller than that of the traditional ADRC. The root mean square deviation method is applied to make the quantitative analysis for the data in Figure 7a. The value of the x-axis is 0.0386 μm, y-axis is 0.0351 μm, z-axis is 0.0336 μm, φ-axis is 0.0588 μrad, θ-axis is 0.0612 μrad, and the -axis is 0.0768 μrad. The same method is applied for the data in Figure 7b, the value of the x-axis is 0.0149 μm, y-axis is 0.0132 μm, z-axis is 0.0121 μm, φ-axis is 0.0382 μrad, θ-axis is 0.0335 μrad, and the -axis is 0.0481 μrad. It can be seen that, through the deviation analysis, the influence on the planar motor position from force and torque disturbances is weakened by applying the improved ADRC. Thus, it can be concluded that the proposed developed ADRC has better anti-disturbance performance compared with the traditional ADRC.
6. Conclusions
This paper builds a multi-degree, real-time electromagnetic model for a maglev planar motor with concentric windings. Decoupling the 16 input winding current allows the control system possible to work in the six degrees of freedom independently. After the decoupling, the position controller can be designed for each degree of freedom. To improve the system robustness to the disturbance, this paper proposes an improved ADRC controller taking the maglev characteristics into account. It overcomes the non-smooth characteristics of the nonlinear function and decreases the amount of the system jitter. Thus, it is more suitable for the control of the maglev planar motor system. The step disturbance signal is imposed on one degree of freedom to test the influence on the other five degrees of freedom. Furthermore, the disturbance has been applied on the load side to test the robustness of the traditional ADRC and the improved ADRC. The result shows that the improved maglev control system has higher robustness than that of the traditional ADRC. The proposed maglev planar motor is applied in position servo systems. Further study will be focused on the trajectory planning of this system and the optimization of the dynamic performance of the controller.
Acknowledgments
This work was supported in part by the National Science and Technology Major Project (2009ZX02207-001), in part by the China Postdoctoral Science Foundation Funded Project (2015M80262), in part by the State Key Program of National Natural Science of China under Grant (51537002), the National Natural Science Foundation of China (51607044), and in part by “the Fundamental Research Funds for the Central Universities” (Grant No. HIT. NSRIF. 2017010).
Author Contributions
Design of the research scheme and research supervision: Baoquan Kou, Feng Xing and Lu Zhang; Performing of the research and writing of the manuscript: Chaoning Zhang, Yiheng Zhou and Tiecheng Wang.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rovers, J.M.M.; Jansen, J.W.; Compter, J.C.; Lomonova, E.A. Analysis Method of the Dynamic Force and Torque Distribution in the Magnet Array of a Commutated Magnetically Levitated Planar Actuator. IEEE Trans. Ind. Electron. 2012, 59, 2157–2166. [Google Scholar] [CrossRef]
- Kim, W.J.; Trumper, D.L. High-precision magnetic levitation stage for photolithography. J. Precis. Eng. 1998, 22, 66–77. [Google Scholar] [CrossRef]
- Zhang, L.; Kou, B.Q.; Zhang, H.; Guo, S.L. Characteristic Analysis of a Long-Stroke Synchronous Permanent Magnet Planar Motor. IEEE Trans. Magn. 2012, 48, 4658–4661. [Google Scholar] [CrossRef]
- Achtenberg, J.; Rovers, J.M.M.; van Lierop, C.M.M.; Jansen, J.W.; van den Bosch, P.P.J.; Lomonova, E.A. Model based commutation containing edge coils for a moving magnet planar actuator. IEEE Trans. Ind. Appl. 2010, 130, 1147–1152. [Google Scholar] [CrossRef]
- Compter, J.C. Electro-dynamic planar motor. J. Precis. Eng. 2004, 28, 171–180. [Google Scholar] [CrossRef]
- Min, W.; Zhang, M.; Zhu, Y.; Chen, B.D.; Duan, G.H.; Hu, J.C.; Yin, W.S. Analysis and optimization of a new 2-D magnet array for planar motor. IEEE Trans. Magn. 2010, 46, 1167–1171. [Google Scholar] [CrossRef]
- Overboom, T.T.; Smeets, J.P.C.; Jansen, J.W.; Lomonova, E. Semianalytical calculation of the torque in a linear permanent-magnet motor with finite yoke length. IEEE Trans. Magn. 2012, 48, 3575–3578. [Google Scholar] [CrossRef]
- Choi, J.H.; Park, J.H.; Baek, Y.S. Design and Experimental Validation of Performance for a Maglev Moving-Magnet-Type Synchronous PM Planar Moto. IEEE Trans. Magn. 2006, 42, 3419–3421. [Google Scholar] [CrossRef]
- Overboom, T.T.; Smeets, J.P.C.; Jansen, J.W.; Lomonova, E. Topology comparison for a magnetically suspended ceiling actuator. In Proceedings of the IEEE International Electric Machines & Drives Conference, Niagara Falls, ON, Canada, 15–18 May 2011; pp. 296–301.
- Kou, B.Q.; Zhang, H.; Li, L.Y. Analysis and Design of a Novel 3-DOF Lorentz-Force-Driven DC Planar Motor. IEEE Trans. Magn. 2011, 47, 2118–2126. [Google Scholar]
- Nguyen, V.H.; Kim, J.W. Design and control of a compact lightweight planar position moving over a concentrated-Field Magnet Matrix. IEEE Trans. Mech. 2013, 18, 1090–1099. [Google Scholar] [CrossRef]
- Jansen, J.W.; Smeets, J.P.C.; Overboom, T.T. Overview of Analytical Models for the Design of Linear and Planar Motors. IEEE Trans. Magn. 2014, 50, 39–52. [Google Scholar] [CrossRef]
- Min, W.; Zhang, M.; Zhu, Y.; Liu, F.; Duan, G.; Hu, J.; Yin, W. Analysis and design of novel overlapping ironless windings for planar motors. IEEE Trans. Magn. 2011, 47, 4635–4642. [Google Scholar] [CrossRef]
- Zhang, L.; Kou, B.Q.; Li, L.Y. Modeling and Design of an Integrated Winding Synchronous Permanent Magnet Planar Motor. IEEE Trans. Plasma Sci. 2013, 41, 1214–1219. [Google Scholar] [CrossRef]
- Van Lierop, C.M.M.; Jansen, J.W.; Damen, A.A.H.; Lomonova, E.A.; van den Bosch, P.P.J.; Vandenput, A.J.A. Model-Based Commutation of a Long-Stroke Magnetically Levitated Linear Actuator. IEEE Trans. Ind. Appl. 2009, 45, 1982–1990. [Google Scholar] [CrossRef]
- Jansen, J.W.; Van Lierop, C.M.M.; Lomonova, E.A.; Vandenput, A.J.A. Modeling of Magnetically Levitated Planar Actuators With Moving Magnets. IEEE Trans. Magn. 2007, 43, 15–25. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Contr. Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Singhal, R.; Padhee, S.; Kaur, G. Design of fractional order PID controller for speed control of DC motor. Int. J. Sci. Res. Publ. 2012, 2, 1–8. [Google Scholar]
- Han, J.Q. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Xia, Y.Q.; Pu, F.; Li, S.F.; Gao, Y. Lateral Path Tracking Control of Autonomous Land Vehicle Based on ADRC and Differential Flatness. IEEE Trans. Ind. Electron. 2016, 63, 3091–3099. [Google Scholar] [CrossRef]
- Han, J.Q. Disturbance Rejection Controller and its Application. Control Decis. 1998, 13, 19–23. [Google Scholar]
- Zhang, L.; Kou, B.Q.; Xing, F.; Luo, J. Modeling and Analysis of a Magnetically Levitated Synchronous Permanent Magnet Planar Motor with Concentric Structure Winding. In Proceedings of the Electromagnetic Launch Technology, La Jolla, CA, USA, 7–11 July 2014; pp. 1–6.
- Li, S.Q.; Li, J.; Mo, Y.P. Piezoelectric Multimode Vibration Control for Stiffened Plate Using ADRC-Based Acceleration Compensation. IEEE Trans. Ind. Electron. 2014, 61, 6892–6902. [Google Scholar] [CrossRef]
- Chen, Q.M.; Li, L.Y.; Wang, M.Y.; Pei, L. The precise modeling and active disturbance rejection control of voice coil motor in high precision motion control system. Appl. Math. Model. 2015, 39, 5936–5948. [Google Scholar] [CrossRef]
- Rahman, M.M.; Chowdhury, A.H. Comparative study of ADRC and PID based Load Frequency Control. In Proceedings of the International Conference on Electrical Engineering and Information Communication Technology, Dubai, UAE, 23–24 December 2015; pp. 1–5.
- Jansen, J.W. Magnetically Levitated Planar Actuator with Moving Magnets: Electromechanical Analysis and Design. Ph.D. Thesis, Eindhoven Univ. Technol., Eindhoven, The Netherlands, November 2007. [Google Scholar]
- Peng, J.; Zhou, Y.F.; Liu, G.D. Calculation of a New Real-Time Control Model for the Magnetically Levitated Ironless Planar Motor. IEEE Trans. Magn. 2013, 49, 1416–1422. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).