
Evolutionary Approach to the Euclidean Steiner Tree Problem in n-Space


Abstract
1. Introduction
1.1. Definitions
1.2. Related Work
1.3. The Contribution of This Work
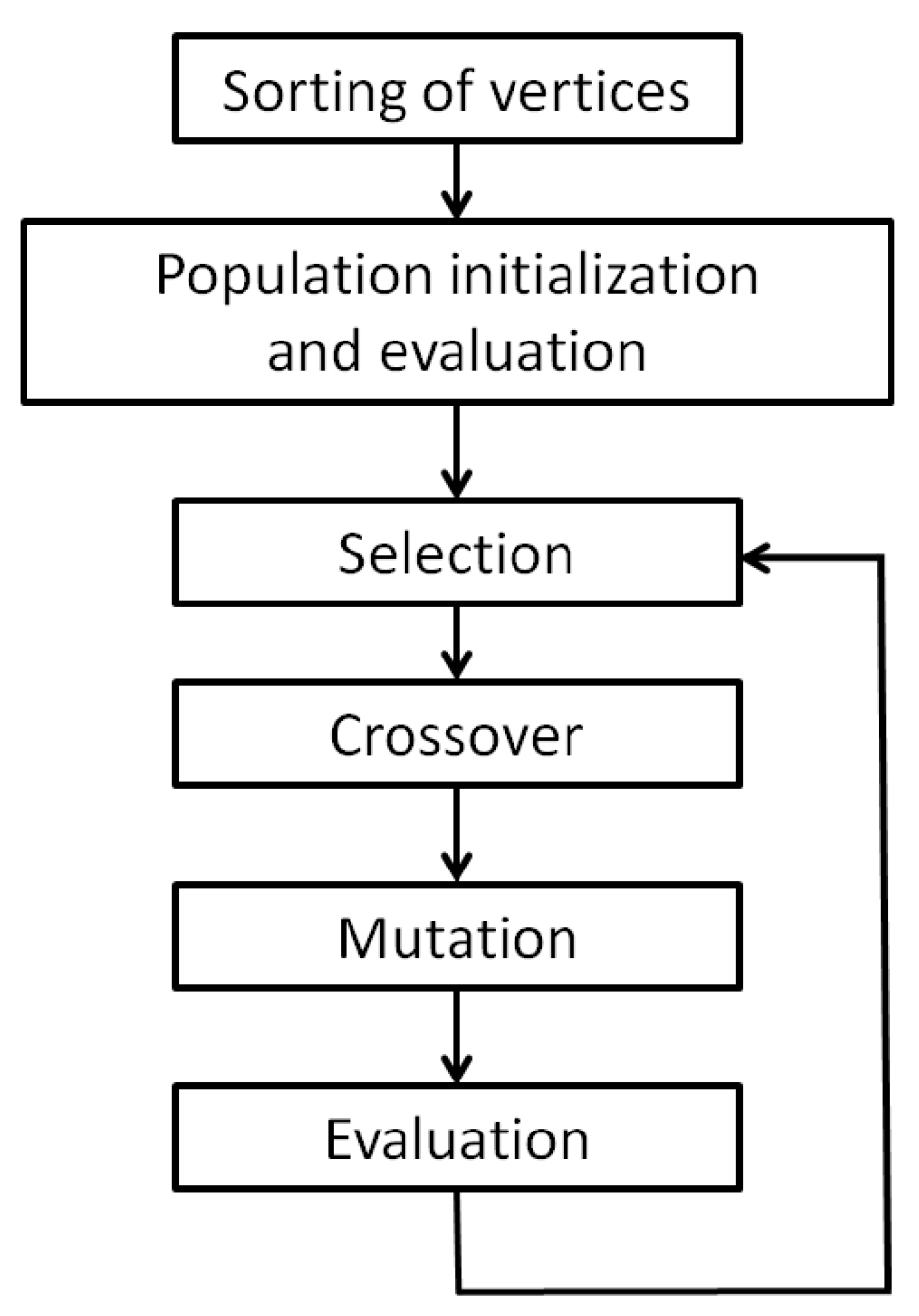
2. Proposed Algorithm
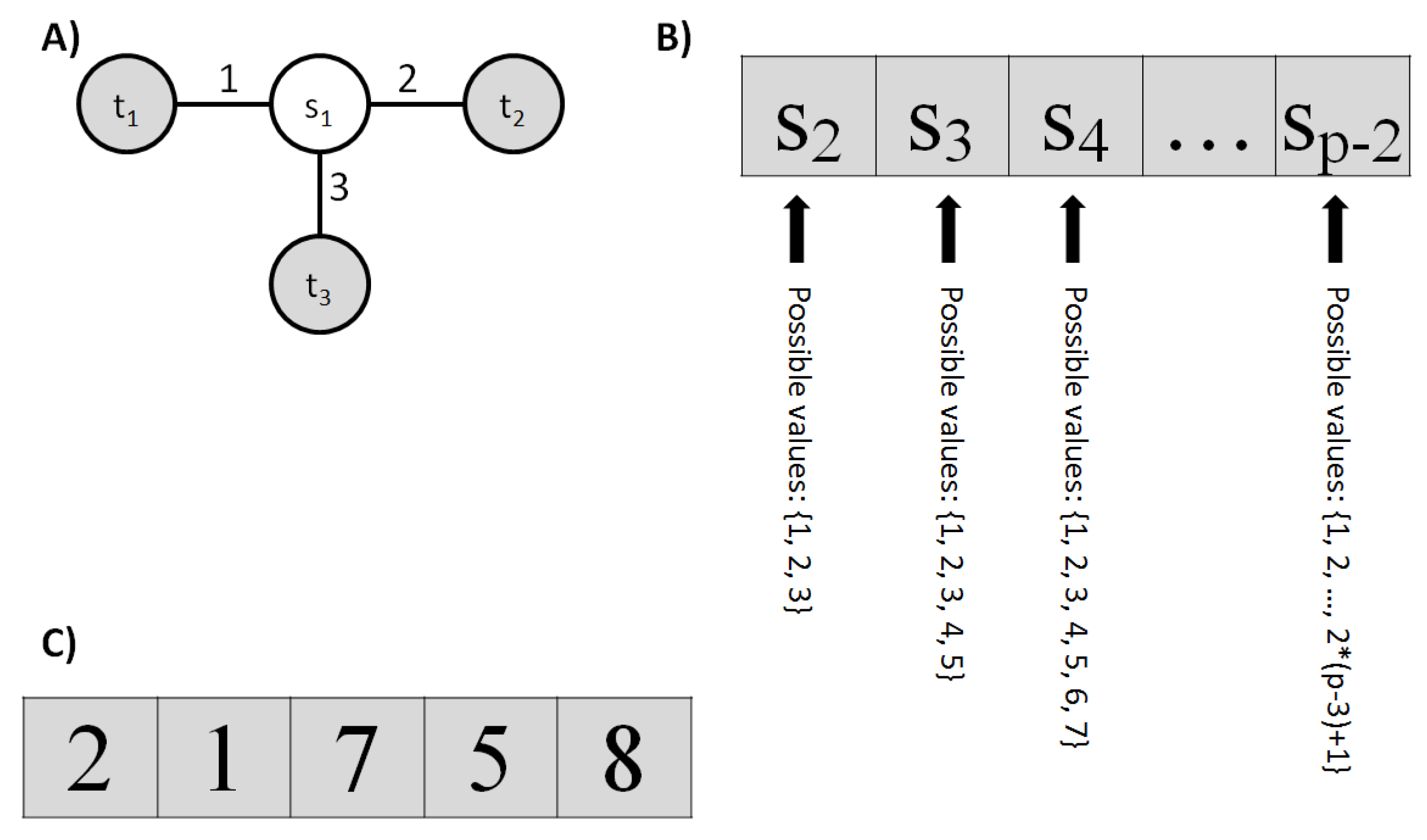
2.1. Data Structure
2.2. Population Initialization
2.3. Individual Evaluation
2.4. Selection
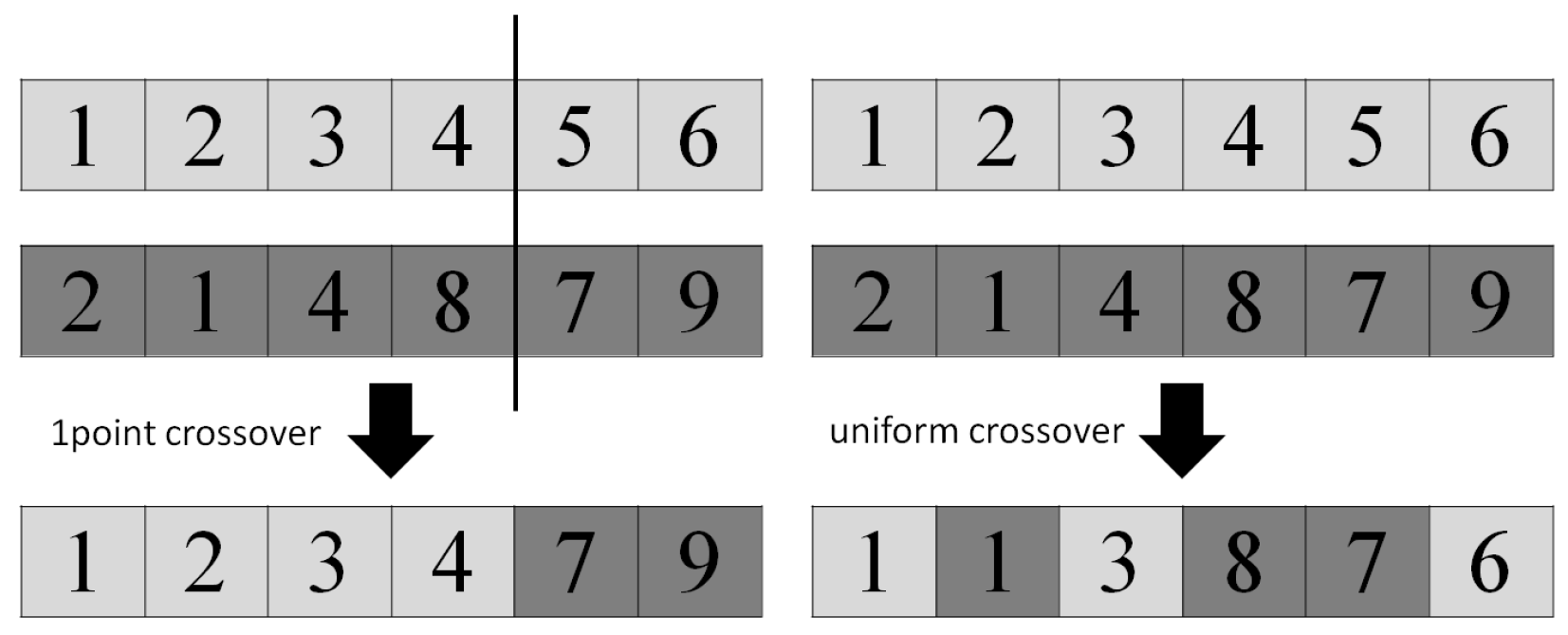
2.5. Crossover
2.6. Mutation
2.7. Computational Complexity
2.8. Summary
3. Results
- Population size—80;
- Number of generations—70;
- Tournament size—3;
- Crossover probability—0.8;
- Mutation probability—0.1.
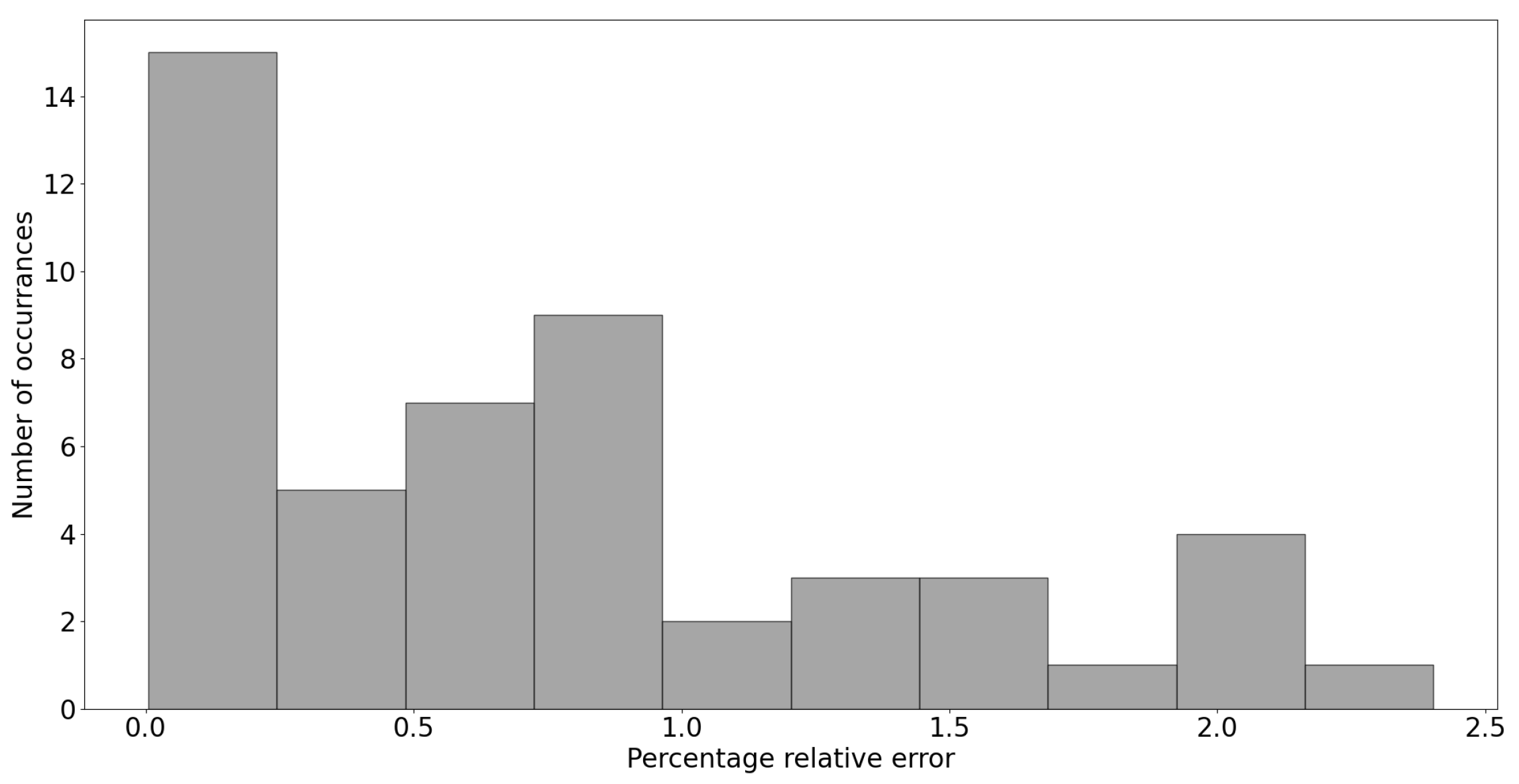
3.1. Results of the Basic Version of the Algorithm
3.2. Results for the Algorithm with Population Initialization Heuristics
4. Conclusions
- Addresses a Specific Gap. This publication tackles a gap in the usage of genetic algorithms for optimizing connection networks within multi-dimensional Euclidean space, particularly for the Euclidean Steiner Tree Problem (ESTP) in where .
- Tailored Heuristic. A specialized evolutionary heuristic is introduced, adapted to ESTP. The problem is reformulated as a discrete optimization task, where Steiner points are added to minimize the total connection length between a given set of points.
- Significance of Initialization. A key finding is the high impact of the initial population generation method. In particular, sorting points based on their addition order in Prim’s MST algorithm significantly improves solution quality compared to purely random initialization.
- Statistical Validation. Different algorithm configurations were tested on problems with 17 and 100 points. The resulting solutions underwent statistical significance analysis, confirming that appropriate parameter settings and initialization strategies lead to better convergence and higher-quality solutions.
- Extension to Higher Dimensions. While the study presents detailed results for , the method is applicable to any-dimensional Euclidean space. Preliminary tests in confirm analogous improvements in solution quality, thus supporting the broader utility of the proposed approach.
- Practical Relevance. Given the computational complexity of exact methods for dimensions higher than two, this heuristic offers a practical compromise. It provides near-optimal solutions for moderate-sized problems and significantly benefits from well-chosen genetic algorithm parameters, especially the initialization procedure based on Prim’s MST.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GA | Genetic algorithm |
| ESTP | Euclidean Steiner Tree Problem |
| MST | Minimal spanning tree |
| SMT | Steiner Minimal Tree |
| FST | Full Steiner topology |
| RMT | Relative minimal tree |
References
- Fampa, M.; Lee, J.; Maculan, N. An overview of exact algorithms for the Euclidean Steiner tree problem in n-space. Int. Trans. Oper. Res. 2016, 23, 861–874. [Google Scholar] [CrossRef]
- Hwang, F.K.; Richards, D.S.; Winter, P. The Steiner Tree Problem, Annals of Discrete Mathematics 53; Elsevier: Amsterdam, The Netherlands, 1992. [Google Scholar]
- Kahng, A.B.; Robins, G. On Optimal Interconnections for VLSI; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1994. [Google Scholar]
- Cavalli-Sforza, L.L.; Edwards, A.W. Phylogenetic analysis. Models and estimation procedures. Am. J. Hum. Genet. 1967, 19, 233–257. [Google Scholar] [PubMed]
- Cheng, X.Z.; Du, D.Z. (Eds.) Steiner Trees in Industry; Combinatorial Optimization; Springer: Boston, MA, USA, 2002; Volume 11. [Google Scholar] [CrossRef]
- Rodríguez-Pereira, J.; Fernández, E.; Laporte, G.; Benavent, E.; Martínez-Sykora, A. The Steiner Traveling Salesman Problem and its extensions. Eur. J. Oper. Res. 2019, 278, 615–628. [Google Scholar] [CrossRef]
- Melzak, Z.A. On the problem of Steiner. Can. Math. Bull. 1961, 4, 143–148. [Google Scholar] [CrossRef]
- Warme, D.; Winter, P.; Zachariasen, M. Exact Algorithms for Plane Steiner Tree Problems: A Computational Study. In Advances in Steiner Trees; Du, D.Z., Smith, J., Rubinstein, J., Eds.; Springer: Boston, MA, USA, 2000; pp. 81–116. [Google Scholar] [CrossRef]
- Gilbert, E.N.; Pollak, H.O. Steiner Minimal Trees. SIAM J. Appl. Math. 1968, 16, 1–29. [Google Scholar] [CrossRef]
- Smith, W.D. How to find Steiner Minimal Trees in euclideand-space. Algorithmica 1992, 7, 137–177. [Google Scholar] [CrossRef]
- Fampa, M.; Anstreicher, K.M. An improved algorithm for computing Steiner Minimal Trees in Euclidean d-space. Discret. Optim. 2008, 5, 530–540. [Google Scholar] [CrossRef]
- Fonseca, R.; Brazil, M.; Winter, P.; Zachariasen, M. Faster exact algorithms for computing Steiner trees in higher dimensional Euclidean spaces. In Proceedings of the Workshop of the 11th Dimacs Implementation Challenge, Providence, RI, USA, 4–5 December 2014. [Google Scholar]
- Fampa, M.; Lee, J.; Melo, W. A specialized branch-and-bound algorithm for the Euclidean Steiner tree problem in n-space. Comput. Optim. Appl. 2016, 65, 47–71. [Google Scholar] [CrossRef]
- Fampa, M. Insight into the computation of Steiner Minimal Trees in Euclidean space of general dimension. Discret. Appl. Math. 2022, 308, 4–19. [Google Scholar] [CrossRef]
- do Forte, V.L.; Montenegro, F.M.T.; Brito, J.A.d.M.; Maculan, N. Iterated Local Search algorithms for the Euclidean Steiner tree problem in n dimensions. Int. Trans. Oper. Res. 2015, 23, 1185–1199. [Google Scholar] [CrossRef]
- Jones, J.; Harris, F.C.J. A Genetic Algorithm for the Steiner Minimal Tree Problem. In Proceedings of the ISCA’s International Conference on Intelligent Systems, Reno, NV, USA, 19–21 June 1996. [Google Scholar]
- Chakraborty, G. Genetic Algorithm Approaches to Solve Various Steiner Tree Problems. In Steiner Trees in Industry SE—2; Combinatorial Optimization; Cheng, X., Du, D.Z., Eds.; Springer: Boston, MA, USA, 2001; Volume 11, pp. 29–69. [Google Scholar]
- Barreiros, J. A Hierarchic Genetic Algorithm for Computing (near) Optimal Euclidean Steiner Trees. In Proceedings of the GECCO 2003: Proceedings of the Bird of a Feather Workshops, Genetic and Evolutionary Computation Conference, Chigaco, IL, USA, 11 July 2003; pp. 56–65. [Google Scholar]
- Frommer, I.; Golden, B. A Genetic Algorithm for Solving the Euclidean Non-Uniform Steiner Tree Problem. In Extending the Horizons: Advances in Computing, Optimization, and Decision Technologies SE—3; Operations Research/Computer Science Interfaces Series; Baker, E., Joseph, A., Mehrotra, A., Trick, M., Eds.; Springer: Boston, MA, USA, 2007; Volume 37, pp. 31–48. [Google Scholar] [CrossRef]
- Bereta, M. Baldwin effect and Lamarckian evolution in a memetic algorithm for Euclidean Steiner Tree Problem. Memetic Comput. 2019, 11, 35–52. [Google Scholar] [CrossRef]
- Cao, S.; Chen, J.; Gou, J. Binary Particle Swarm Optimization Algorithm for Euclidean Steiner Tree. In Proceedings of the 2024 4th International Conference on Computer Science and Blockchain (CCSB), Shenzhen, China, 6–8 September 2024; pp. 417–422. [Google Scholar] [CrossRef]
- Bereta, M. Monte Carlo Tree Search Algorithm for the Euclidean Steiner Tree Problem. J. Telecommun. Inf. Technol. 2017, 4, 71–81. [Google Scholar] [CrossRef]
- Julstrom, B.A. A scalable genetic algorithm for the rectilinear Steiner problem. In Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No.02TH8600), Honolulu, HI, USA, 12–17 May 2002. [Google Scholar] [CrossRef]
- Klau, G.W.; Ljubić, I.; Moser, A.; Mutzel, P.; Neuner, P.; Pferschy, U.; Raidl, G.; Weiskircher, R. Combining a Memetic Algorithm with Integer Programming to Solve the Prize-Collecting Steiner Tree Problem. In Genetic and Evolutionary Computation—GECCO 2004; Deb, K., Ed.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 1304–1315. [Google Scholar]
- Pinto, R.V.; Maculan, N. A new heuristic for the Euclidean Steiner Tree Problem in . Top 2023, 31, 391–413. [Google Scholar] [CrossRef]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Alcalá-Fdez, J.; Sánchez, L.; García, S.; del Jesus, M.J.; Ventura, S.; Garrell, J.M.; Otero, J.; Romero, C.; Bacardit, J.; Rivas, V.M.; et al. KEEL: A software tool to assess evolutionary algorithms for data mining problems. Soft Comput. 2008, 13, 307–318. [Google Scholar] [CrossRef]
- Alcalá-Fdez, J.; Fernández, A.; Luengo, J.; Derrac, J.; García, S.; Sánchez, L.; Herrera, F. KEEL data-mining software tool: Data set repository, integration of algorithms and experimental analysis framework. J. Mult.-Valued Log. Soft Comput. 2011, 17, 255–287. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problem | 1point | uniform | ||||
|---|---|---|---|---|---|---|
| min | Mean (std) | max | min | Mean (std) | max | |
| 3d17-01 | 4.333 | 4.474 (0.091) | 4.643 | 4.396 | 4.477 (0.068) | 4.595 |
| 3d17-02 | 4.545 | 4.636 (0.074) | 4.757 | 4.535 | 4.572 (0.045) | 4.665 |
| 3d17-03 | 4.466 | 4.619 (0.098) | 4.798 | 4.495 | 4.570 (0.048) | 4.676 |
| 3d17-04 | 4.355 | 4.466 (0.052) | 4.540 | 4.399 | 4.447 (0.039) | 4.533 |
| 3d17-05 | 3.768 | 3.829 (0.043) | 3.902 | 3.750 | 3.811 (0.037) | 3.881 |
| 3d17-06 | 4.921 | 5.011 (0.046) | 5.100 | 4.900 | 4.955 (0.049) | 5.057 |
| 3d17-07 | 4.644 | 4.693 (0.033) | 4.742 | 4.624 | 4.686 (0.071) | 4.863 |
| 3d17-08 | 4.599 | 4.708 (0.054) | 4.816 | 4.593 | 4.681 (0.041) | 4.758 |
| 3d17-09 | 4.185 | 4.225 (0.038) | 4.294 | 4.129 | 4.185 (0.022) | 4.213 |
| 3d17-10 | 4.200 | 4.281 (0.054) | 4.398 | 4.171 | 4.243 (0.044) | 4.319 |
| 3d17-11 | 4.534 | 4.670 (0.113) | 4.918 | 4.492 | 4.598 (0.059) | 4.692 |
| 3d17-12 | 4.069 | 4.185 (0.064) | 4.291 | 4.043 | 4.138 (0.050) | 4.238 |
| 3d17-13 | 4.868 | 4.962 (0.066) | 5.090 | 4.833 | 4.907 (0.053) | 5.016 |
| 3d17-14 | 4.405 | 4.473 (0.057) | 4.615 | 4.390 | 4.435 (0.032) | 4.490 |
| 3d17-15 | 4.846 | 4.929 (0.050) | 4.994 | 4.845 | 4.916 (0.101) | 5.195 |
| 3d17-16 | 4.663 | 4.768 (0.065) | 4.888 | 4.617 | 4.695 (0.035) | 4.745 |
| 3d17-17 | 4.581 | 4.739 (0.083) | 4.881 | 4.561 | 4.696 (0.072) | 4.817 |
| 3d17-18 | 4.183 | 4.255 (0.048) | 4.305 | 4.140 | 4.227 (0.071) | 4.373 |
| 3d17-19 | 4.314 | 4.376 (0.030) | 4.429 | 4.299 | 4.359 (0.048) | 4.473 |
| 3d17-20 | 4.329 | 4.389 (0.060) | 4.507 | 4.330 | 4.379 (0.052) | 4.485 |
| 3d17-21 | 4.461 | 4.513 (0.045) | 4.590 | 4.451 | 4.471 (0.014) | 4.491 |
| 3d17-22 | 4.020 | 4.070 (0.033) | 4.138 | 4.022 | 4.056 (0.031) | 4.114 |
| 3d17-23 | 4.441 | 4.612 (0.096) | 4.777 | 4.373 | 4.578 (0.083) | 4.687 |
| 3d17-24 | 3.943 | 4.009 (0.042) | 4.078 | 3.943 | 3.977 (0.015) | 3.995 |
| 3d17-25 | 4.659 | 4.747 (0.062) | 4.864 | 4.649 | 4.682 (0.043) | 4.788 |
| 3d17-26 | 4.795 | 4.964 (0.109) | 5.161 | 4.762 | 4.887 (0.081) | 5.013 |
| 3d17-27 | 4.782 | 4.905 (0.058) | 4.991 | 4.806 | 4.857 (0.039) | 4.914 |
| 3d17-28 | 4.272 | 4.404 (0.133) | 4.746 | 4.316 | 4.406 (0.060) | 4.494 |
| 3d17-29 | 4.321 | 4.388 (0.047) | 4.463 | 4.230 | 4.333 (0.070) | 4.476 |
| 3d17-30 | 4.750 | 4.793 (0.027) | 4.835 | 4.728 | 4.767 (0.044) | 4.890 |
| 3d17-31 | 4.332 | 4.422 (0.062) | 4.518 | 4.326 | 4.368 (0.038) | 4.455 |
| 3d17-32 | 4.506 | 4.607 (0.102) | 4.847 | 4.528 | 4.605 (0.064) | 4.723 |
| 3d17-33 | 4.504 | 4.599 (0.063) | 4.738 | 4.475 | 4.626 (0.093) | 4.774 |
| 3d17-34 | 4.335 | 4.382 (0.029) | 4.437 | 4.339 | 4.381 (0.042) | 4.488 |
| 3d17-35 | 4.941 | 5.049 (0.049) | 5.135 | 4.892 | 4.962 (0.044) | 5.058 |
| 3d17-36 | 4.343 | 4.412 (0.051) | 4.503 | 4.311 | 4.394 (0.061) | 4.537 |
| 3d17-37 | 4.592 | 4.687 (0.063) | 4.799 | 4.562 | 4.644 (0.068) | 4.741 |
| 3d17-38 | 5.055 | 5.132 (0.041) | 5.203 | 5.011 | 5.088 (0.058) | 5.190 |
| 3d17-39 | 4.371 | 4.425 (0.040) | 4.493 | 4.373 | 4.439 (0.051) | 4.555 |
| 3d17-40 | 4.147 | 4.205 (0.036) | 4.251 | 4.162 | 4.192 (0.014) | 4.210 |
| 3d17-41 | 4.522 | 4.591 (0.036) | 4.643 | 4.516 | 4.570 (0.047) | 4.691 |
| 3d17-42 | 4.292 | 4.347 (0.046) | 4.429 | 4.221 | 4.287 (0.040) | 4.349 |
| 3d17-43 | 4.492 | 4.611 (0.069) | 4.728 | 4.480 | 4.550 (0.048) | 4.667 |
| 3d17-44 | 5.096 | 5.152 (0.062) | 5.266 | 5.072 | 5.123 (0.038) | 5.185 |
| 3d17-45 | 3.999 | 4.063 (0.040) | 4.118 | 3.997 | 4.030 (0.024) | 4.084 |
| 3d17-46 | 4.704 | 4.776 (0.042) | 4.863 | 4.723 | 4.762 (0.027) | 4.816 |
| 3d17-47 | 4.951 | 5.000 (0.034) | 5.051 | 4.841 | 4.927 (0.065) | 5.040 |
| 3d17-48 | 3.928 | 3.992 (0.036) | 4.040 | 3.884 | 3.972 (0.061) | 4.091 |
| 3d17-49 | 4.946 | 5.074 (0.077) | 5.223 | 4.921 | 5.004 (0.047) | 5.089 |
| 3d17-50 | 4.143 | 4.193 (0.035) | 4.251 | 4.128 | 4.196 (0.050) | 4.270 |
| Problem | 1point | uniform | ||||
|---|---|---|---|---|---|---|
| min | Mean (std) | max | min | Mean (std) | max | |
| 3d100-01 | 36.232 | 36.855 (0.395) | 37.376 | 34.854 | 35.897 (0.561) | 36.740 |
| 3d100-02 | 34.573 | 35.245 (0.402) | 35.775 | 33.259 | 34.240 (0.438) | 34.718 |
| 3d100-03 | 35.802 | 36.390 (0.357) | 37.078 | 34.479 | 35.202 (0.471) | 36.183 |
| 3d100-04 | 33.835 | 34.493 (0.384) | 35.154 | 32.816 | 33.498 (0.375) | 33.992 |
| 3d100-05 | 35.439 | 36.365 (0.524) | 36.966 | 34.515 | 35.141 (0.517) | 36.113 |
| 3d100-06 | 34.906 | 35.732 (0.489) | 36.445 | 34.197 | 34.515 (0.261) | 35.054 |
| 3d100-07 | 34.889 | 35.470 (0.446) | 36.129 | 33.410 | 34.168 (0.414) | 34.856 |
| 3d100-08 | 33.928 | 34.551 (0.409) | 35.111 | 32.689 | 33.375 (0.441) | 34.175 |
| 3d100-09 | 35.050 | 36.036 (0.487) | 36.936 | 34.024 | 34.718 (0.374) | 35.369 |
| 3d100-10 | 35.292 | 35.886 (0.377) | 36.380 | 32.833 | 34.036 (0.643) | 35.070 |
| 3d100-11 | 34.838 | 35.691 (0.500) | 36.756 | 33.584 | 34.300 (0.432) | 34.879 |
| 3d100-12 | 33.839 | 35.142 (0.547) | 35.837 | 33.462 | 34.182 (0.360) | 34.758 |
| 3d100-13 | 35.436 | 36.015 (0.436) | 36.642 | 33.792 | 34.422 (0.283) | 34.797 |
| 3d100-14 | 34.308 | 35.267 (0.531) | 36.174 | 33.354 | 33.951 (0.608) | 35.404 |
| 3d100-15 | 34.479 | 34.978 (0.371) | 35.690 | 33.109 | 33.959 (0.484) | 34.859 |
| 3d100-16 | 35.579 | 36.195 (0.344) | 36.799 | 33.642 | 34.811 (0.683) | 35.930 |
| 3d100-17 | 34.960 | 36.114 (0.453) | 36.502 | 34.154 | 34.730 (0.504) | 35.577 |
| 3d100-18 | 36.004 | 36.495 (0.297) | 36.955 | 34.701 | 35.410 (0.550) | 36.593 |
| 3d100-19 | 35.328 | 36.135 (0.586) | 37.138 | 34.601 | 35.004 (0.316) | 35.590 |
| 3d100-20 | 35.438 | 36.122 (0.297) | 36.584 | 34.038 | 35.551 (0.569) | 36.140 |
| 3d100-21 | 35.134 | 36.515 (0.616) | 37.268 | 34.114 | 35.263 (0.596) | 35.756 |
| 3d100-22 | 33.946 | 34.601 (0.442) | 35.360 | 32.796 | 33.377 (0.369) | 34.109 |
| 3d100-23 | 35.531 | 35.938 (0.368) | 36.462 | 34.181 | 34.823 (0.312) | 35.204 |
| 3d100-24 | 33.234 | 34.137 (0.457) | 34.692 | 32.337 | 32.914 (0.412) | 33.616 |
| 3d100-25 | 34.558 | 35.704 (0.524) | 36.549 | 33.984 | 34.635 (0.394) | 35.160 |
| 3d100-26 | 33.877 | 34.642 (0.569) | 35.983 | 32.575 | 33.547 (0.496) | 34.336 |
| 3d100-27 | 35.414 | 36.308 (0.463) | 36.923 | 34.134 | 35.013 (0.508) | 35.932 |
| 3d100-28 | 34.098 | 35.306 (0.503) | 35.933 | 33.535 | 34.006 (0.370) | 34.697 |
| 3d100-29 | 34.637 | 35.599 (0.477) | 36.415 | 33.643 | 34.477 (0.642) | 35.483 |
| 3d100-30 | 33.250 | 34.408 (0.720) | 35.407 | 32.719 | 33.590 (0.455) | 34.455 |
| 3d100-31 | 35.197 | 35.964 (0.439) | 36.639 | 34.159 | 34.686 (0.344) | 35.109 |
| 3d100-32 | 35.621 | 36.647 (0.593) | 37.772 | 34.771 | 35.322 (0.352) | 35.934 |
| 3d100-33 | 35.027 | 35.910 (0.554) | 36.565 | 33.440 | 34.547 (0.596) | 35.336 |
| 3d100-34 | 35.470 | 35.965 (0.298) | 36.394 | 33.719 | 34.526 (0.378) | 35.031 |
| 3d100-35 | 35.405 | 36.607 (0.558) | 37.251 | 33.807 | 35.265 (0.719) | 36.228 |
| 3d100-36 | 33.498 | 34.154 (0.455) | 34.640 | 32.354 | 32.804 (0.391) | 33.654 |
| 3d100-37 | 34.724 | 35.145 (0.322) | 35.945 | 33.408 | 33.767 (0.364) | 34.641 |
| 3d100-38 | 35.973 | 36.743 (0.622) | 37.942 | 34.461 | 35.920 (0.649) | 37.169 |
| 3d100-39 | 33.648 | 33.923 (0.171) | 34.231 | 31.600 | 32.404 (0.523) | 33.211 |
| 3d100-40 | 35.333 | 36.134 (0.421) | 36.759 | 34.191 | 34.829 (0.474) | 35.574 |
| 3d100-41 | 34.658 | 35.773 (0.494) | 36.418 | 33.960 | 34.509 (0.304) | 34.944 |
| 3d100-42 | 33.927 | 34.812 (0.410) | 35.394 | 33.164 | 33.695 (0.291) | 34.218 |
| 3d100-43 | 35.062 | 36.208 (0.524) | 37.178 | 33.914 | 34.551 (0.504) | 35.664 |
| 3d100-44 | 36.050 | 36.548 (0.380) | 37.379 | 33.875 | 34.686 (0.528) | 35.312 |
| 3d100-45 | 35.893 | 36.235 (0.342) | 36.944 | 34.190 | 34.881 (0.444) | 35.642 |
| 3d100-46 | 35.284 | 36.006 (0.446) | 36.775 | 33.162 | 34.878 (0.804) | 35.858 |
| 3d100-47 | 33.986 | 34.665 (0.458) | 35.326 | 32.761 | 33.584 (0.435) | 34.075 |
| 3d100-48 | 35.787 | 36.367 (0.273) | 36.784 | 34.452 | 35.053 (0.374) | 35.596 |
| 3d100-49 | 35.566 | 36.724 (0.637) | 37.565 | 33.847 | 35.492 (0.587) | 36.042 |
| 3d100-50 | 34.048 | 35.201 (0.502) | 35.748 | 32.914 | 33.867 (0.627) | 34.773 |
| Problem | 1point | uniform | nn2-1p | nn2-u | nn3-1p | nn3-u | nn4-1p | nn4-u | nn5-1p | nn5-u |
|---|---|---|---|---|---|---|---|---|---|---|
| 3d17-01 | 4.333 | 4.396 | 4.390 | 4.348 | 4.339 | 4.333 | 4.421 | 4.339 | 4.339 | 4.391 |
| 3d17-02 | 4.545 | 4.535 | 4.496 | 4.504 | 4.535 | 4.531 | 4.535 | 4.525 | 4.543 | 4.535 |
| 3d17-03 | 4.466 | 4.495 | 4.460 | 4.514 | 4.452 | 4.430 | 4.483 | 4.465 | 4.508 | 4.519 |
| 3d17-04 | 4.355 | 4.399 | 4.344 | 4.374 | 4.366 | 4.387 | 4.344 | 4.320 | 4.325 | 4.336 |
| 3d17-05 | 3.768 | 3.750 | 3.765 | 3.750 | 3.768 | 3.750 | 3.771 | 3.766 | 3.780 | 3.766 |
| 3d17-06 | 4.921 | 4.900 | 4.852 | 4.876 | 4.901 | 4.867 | 4.865 | 4.885 | 4.930 | 4.854 |
| 3d17-07 | 4.644 | 4.624 | 4.562 | 4.576 | 4.607 | 4.605 | 4.579 | 4.585 | 4.603 | 4.611 |
| 3d17-08 | 4.599 | 4.593 | 4.620 | 4.609 | 4.595 | 4.609 | 4.613 | 4.607 | 4.613 | 4.621 |
| 3d17-09 | 4.185 | 4.129 | 4.153 | 4.124 | 4.159 | 4.159 | 4.164 | 4.129 | 4.164 | 4.129 |
| 3d17-10 | 4.200 | 4.171 | 4.178 | 4.239 | 4.196 | 4.191 | 4.226 | 4.175 | 4.231 | 4.185 |
| 3d17-11 | 4.534 | 4.492 | 4.552 | 4.555 | 4.443 | 4.564 | 4.557 | 4.564 | 4.562 | 4.564 |
| 3d17-12 | 4.069 | 4.043 | 4.100 | 4.062 | 4.108 | 4.018 | 4.071 | 4.087 | 4.045 | 4.086 |
| 3d17-13 | 4.868 | 4.833 | 4.801 | 4.789 | 4.830 | 4.795 | 4.788 | 4.799 | 4.817 | 4.801 |
| 3d17-14 | 4.405 | 4.390 | 4.377 | 4.387 | 4.395 | 4.387 | 4.410 | 4.369 | 4.415 | 4.395 |
| 3d17-15 | 4.846 | 4.845 | 4.863 | 4.845 | 4.842 | 4.847 | 4.881 | 4.860 | 4.883 | 4.846 |
| 3d17-16 | 4.663 | 4.617 | 4.643 | 4.633 | 4.665 | 4.617 | 4.617 | 4.645 | 4.657 | 4.645 |
| 3d17-17 | 4.581 | 4.561 | 4.594 | 4.594 | 4.506 | 4.506 | 4.559 | 4.594 | 4.588 | 4.572 |
| 3d17-18 | 4.183 | 4.140 | 4.167 | 4.185 | 4.182 | 4.152 | 4.184 | 4.156 | 4.133 | 4.188 |
| 3d17-19 | 4.314 | 4.299 | 4.312 | 4.331 | 4.308 | 4.296 | 4.338 | 4.319 | 4.330 | 4.296 |
| 3d17-20 | 4.329 | 4.330 | 4.326 | 4.306 | 4.321 | 4.311 | 4.326 | 4.306 | 4.338 | 4.310 |
| 3d17-21 | 4.461 | 4.451 | 4.463 | 4.451 | 4.452 | 4.451 | 4.461 | 4.451 | 4.452 | 4.452 |
| 3d17-22 | 4.020 | 4.022 | 3.995 | 4.007 | 4.010 | 3.992 | 3.982 | 3.994 | 3.985 | 3.995 |
| 3d17-23 | 4.441 | 4.373 | 4.400 | 4.420 | 4.483 | 4.430 | 4.407 | 4.411 | 4.462 | 4.403 |
| 3d17-24 | 3.943 | 3.943 | 3.949 | 3.943 | 3.949 | 3.943 | 3.970 | 3.949 | 3.943 | 3.963 |
| 3d17-25 | 4.659 | 4.649 | 4.643 | 4.649 | 4.643 | 4.638 | 4.652 | 4.644 | 4.638 | 4.638 |
| 3d17-26 | 4.795 | 4.762 | 4.685 | 4.747 | 4.754 | 4.744 | 4.898 | 4.671 | 4.809 | 4.647 |
| 3d17-27 | 4.782 | 4.806 | 4.755 | 4.774 | 4.785 | 4.783 | 4.798 | 4.763 | 4.755 | 4.755 |
| 3d17-28 | 4.272 | 4.316 | 4.351 | 4.320 | 4.354 | 4.318 | 4.329 | 4.289 | 4.312 | 4.308 |
| 3d17-29 | 4.321 | 4.230 | 4.276 | 4.230 | 4.241 | 4.214 | 4.227 | 4.265 | 4.233 | 4.230 |
| 3d17-30 | 4.750 | 4.728 | 4.734 | 4.700 | 4.734 | 4.686 | 4.728 | 4.717 | 4.716 | 4.720 |
| 3d17-31 | 4.332 | 4.326 | 4.307 | 4.293 | 4.314 | 4.286 | 4.312 | 4.321 | 4.301 | 4.335 |
| 3d17-32 | 4.506 | 4.528 | 4.505 | 4.508 | 4.524 | 4.512 | 4.519 | 4.509 | 4.518 | 4.497 |
| 3d17-33 | 4.504 | 4.475 | 4.547 | 4.475 | 4.536 | 4.506 | 4.550 | 4.550 | 4.554 | 4.492 |
| 3d17-34 | 4.335 | 4.339 | 4.329 | 4.295 | 4.295 | 4.326 | 4.286 | 4.289 | 4.300 | 4.307 |
| 3d17-35 | 4.941 | 4.892 | 4.923 | 4.907 | 4.963 | 4.917 | 4.893 | 4.902 | 4.907 | 4.907 |
| 3d17-36 | 4.343 | 4.311 | 4.358 | 4.348 | 4.251 | 4.343 | 4.311 | 4.305 | 4.324 | 4.344 |
| 3d17-37 | 4.592 | 4.562 | 4.621 | 4.484 | 4.559 | 4.531 | 4.615 | 4.563 | 4.596 | 4.560 |
| 3d17-38 | 5.055 | 5.011 | 5.009 | 5.034 | 5.037 | 5.063 | 4.989 | 5.028 | 5.087 | 5.007 |
| 3d17-39 | 4.371 | 4.373 | 4.351 | 4.345 | 4.406 | 4.352 | 4.354 | 4.388 | 4.388 | 4.375 |
| 3d17-40 | 4.147 | 4.162 | 4.141 | 4.128 | 4.144 | 4.128 | 4.144 | 4.107 | 4.152 | 4.129 |
| 3d17-41 | 4.522 | 4.516 | 4.511 | 4.504 | 4.540 | 4.504 | 4.522 | 4.478 | 4.526 | 4.479 |
| 3d17-42 | 4.292 | 4.221 | 4.219 | 4.183 | 4.218 | 4.209 | 4.207 | 4.201 | 4.218 | 4.263 |
| 3d17-43 | 4.492 | 4.480 | 4.536 | 4.499 | 4.452 | 4.494 | 4.490 | 4.503 | 4.484 | 4.463 |
| 3d17-44 | 5.096 | 5.072 | 5.026 | 5.031 | 5.042 | 4.967 | 5.039 | 5.031 | 5.041 | 4.995 |
| 3d17-45 | 3.999 | 3.997 | 3.998 | 3.998 | 4.000 | 3.998 | 3.998 | 3.994 | 3.979 | 3.978 |
| 3d17-46 | 4.704 | 4.723 | 4.726 | 4.704 | 4.745 | 4.705 | 4.727 | 4.704 | 4.743 | 4.709 |
| 3d17-47 | 4.951 | 4.841 | 4.841 | 4.844 | 4.854 | 4.832 | 4.869 | 4.842 | 4.824 | 4.832 |
| 3d17-48 | 3.928 | 3.884 | 3.884 | 3.887 | 3.893 | 3.893 | 3.906 | 3.885 | 3.902 | 3.896 |
| 3d17-49 | 4.946 | 4.921 | 4.899 | 4.838 | 4.888 | 4.876 | 4.960 | 4.931 | 4.960 | 4.880 |
| 3d17-50 | 4.143 | 4.128 | 4.127 | 4.133 | 4.115 | 4.124 | 4.109 | 4.106 | 4.123 | 4.128 |
| Problem | 1point | uniform | nn2-1p | nn2-u | nn3-1p | nn3-u | nn4-1p | nn4-u | nn5-1p | nn5-u |
|---|---|---|---|---|---|---|---|---|---|---|
| 3d17-01 | 4.474 | 4.477 | 4.447 | 4.415 | 4.461 | 4.416 | 4.514 | 4.425 | 4.473 | 4.458 |
| 3d17-02 | 4.636 | 4.572 | 4.605 | 4.558 | 4.569 | 4.556 | 4.587 | 4.554 | 4.600 | 4.578 |
| 3d17-03 | 4.619 | 4.570 | 4.569 | 4.577 | 4.557 | 4.557 | 4.607 | 4.556 | 4.582 | 4.578 |
| 3d17-04 | 4.466 | 4.447 | 4.407 | 4.406 | 4.439 | 4.412 | 4.406 | 4.404 | 4.445 | 4.400 |
| 3d17-05 | 3.829 | 3.811 | 3.797 | 3.787 | 3.810 | 3.789 | 3.829 | 3.804 | 3.854 | 3.824 |
| 3d17-06 | 5.011 | 4.955 | 4.942 | 4.936 | 4.967 | 4.922 | 4.957 | 4.936 | 4.983 | 4.916 |
| 3d17-07 | 4.693 | 4.686 | 4.632 | 4.638 | 4.647 | 4.654 | 4.662 | 4.635 | 4.662 | 4.635 |
| 3d17-08 | 4.708 | 4.681 | 4.679 | 4.641 | 4.665 | 4.646 | 4.695 | 4.647 | 4.684 | 4.659 |
| 3d17-09 | 4.225 | 4.185 | 4.194 | 4.177 | 4.194 | 4.174 | 4.189 | 4.167 | 4.205 | 4.170 |
| 3d17-10 | 4.281 | 4.243 | 4.259 | 4.274 | 4.305 | 4.267 | 4.307 | 4.253 | 4.289 | 4.256 |
| 3d17-11 | 4.670 | 4.598 | 4.621 | 4.594 | 4.654 | 4.599 | 4.630 | 4.652 | 4.660 | 4.602 |
| 3d17-12 | 4.185 | 4.138 | 4.159 | 4.153 | 4.176 | 4.119 | 4.195 | 4.137 | 4.165 | 4.118 |
| 3d17-13 | 4.962 | 4.907 | 4.866 | 4.838 | 4.883 | 4.862 | 4.911 | 4.870 | 4.884 | 4.861 |
| 3d17-14 | 4.473 | 4.435 | 4.424 | 4.417 | 4.432 | 4.417 | 4.454 | 4.408 | 4.442 | 4.426 |
| 3d17-15 | 4.929 | 4.916 | 4.892 | 4.876 | 4.897 | 4.873 | 4.921 | 4.894 | 4.931 | 4.905 |
| 3d17-16 | 4.768 | 4.695 | 4.722 | 4.667 | 4.744 | 4.688 | 4.733 | 4.688 | 4.743 | 4.694 |
| 3d17-17 | 4.739 | 4.696 | 4.705 | 4.693 | 4.697 | 4.647 | 4.655 | 4.676 | 4.679 | 4.667 |
| 3d17-18 | 4.255 | 4.227 | 4.228 | 4.234 | 4.230 | 4.211 | 4.233 | 4.216 | 4.230 | 4.227 |
| 3d17-19 | 4.376 | 4.359 | 4.371 | 4.366 | 4.387 | 4.339 | 4.383 | 4.356 | 4.372 | 4.346 |
| 3d17-20 | 4.389 | 4.379 | 4.360 | 4.339 | 4.367 | 4.338 | 4.386 | 4.357 | 4.378 | 4.354 |
| 3d17-21 | 4.513 | 4.471 | 4.499 | 4.470 | 4.504 | 4.468 | 4.500 | 4.469 | 4.495 | 4.472 |
| 3d17-22 | 4.070 | 4.056 | 4.053 | 4.034 | 4.037 | 4.022 | 4.033 | 4.023 | 4.060 | 4.040 |
| 3d17-23 | 4.612 | 4.578 | 4.525 | 4.571 | 4.613 | 4.593 | 4.590 | 4.527 | 4.582 | 4.596 |
| 3d17-24 | 4.009 | 3.977 | 3.997 | 3.987 | 4.002 | 3.975 | 3.989 | 3.986 | 3.995 | 3.993 |
| 3d17-25 | 4.747 | 4.682 | 4.672 | 4.677 | 4.689 | 4.688 | 4.714 | 4.668 | 4.667 | 4.679 |
| 3d17-26 | 4.964 | 4.887 | 4.895 | 4.879 | 4.912 | 4.874 | 5.001 | 4.929 | 4.920 | 4.902 |
| 3d17-27 | 4.905 | 4.857 | 4.816 | 4.817 | 4.881 | 4.824 | 4.910 | 4.835 | 4.868 | 4.816 |
| 3d17-28 | 4.404 | 4.406 | 4.409 | 4.392 | 4.430 | 4.374 | 4.387 | 4.365 | 4.389 | 4.376 |
| 3d17-29 | 4.388 | 4.333 | 4.333 | 4.282 | 4.339 | 4.290 | 4.335 | 4.298 | 4.329 | 4.330 |
| 3d17-30 | 4.793 | 4.767 | 4.763 | 4.733 | 4.770 | 4.749 | 4.772 | 4.739 | 4.786 | 4.743 |
| 3d17-31 | 4.422 | 4.368 | 4.388 | 4.369 | 4.408 | 4.378 | 4.390 | 4.398 | 4.402 | 4.383 |
| 3d17-32 | 4.607 | 4.605 | 4.562 | 4.549 | 4.575 | 4.578 | 4.572 | 4.563 | 4.584 | 4.552 |
| 3d17-33 | 4.599 | 4.626 | 4.616 | 4.561 | 4.602 | 4.591 | 4.610 | 4.613 | 4.621 | 4.593 |
| 3d17-34 | 4.382 | 4.381 | 4.387 | 4.362 | 4.367 | 4.377 | 4.361 | 4.351 | 4.374 | 4.355 |
| 3d17-35 | 5.049 | 4.962 | 4.968 | 4.935 | 5.015 | 4.954 | 4.999 | 4.955 | 4.978 | 4.958 |
| 3d17-36 | 4.412 | 4.394 | 4.391 | 4.380 | 4.383 | 4.391 | 4.399 | 4.380 | 4.418 | 4.380 |
| 3d17-37 | 4.687 | 4.644 | 4.678 | 4.599 | 4.656 | 4.621 | 4.677 | 4.650 | 4.673 | 4.638 |
| 3d17-38 | 5.132 | 5.088 | 5.077 | 5.078 | 5.138 | 5.091 | 5.126 | 5.087 | 5.126 | 5.100 |
| 3d17-39 | 4.425 | 4.439 | 4.412 | 4.392 | 4.448 | 4.406 | 4.420 | 4.417 | 4.424 | 4.413 |
| 3d17-40 | 4.205 | 4.192 | 4.183 | 4.172 | 4.192 | 4.184 | 4.191 | 4.178 | 4.204 | 4.183 |
| 3d17-41 | 4.591 | 4.570 | 4.544 | 4.538 | 4.570 | 4.534 | 4.566 | 4.530 | 4.571 | 4.552 |
| 3d17-42 | 4.347 | 4.287 | 4.284 | 4.296 | 4.291 | 4.276 | 4.307 | 4.292 | 4.349 | 4.303 |
| 3d17-43 | 4.611 | 4.550 | 4.592 | 4.546 | 4.593 | 4.588 | 4.578 | 4.578 | 4.617 | 4.549 |
| 3d17-44 | 5.152 | 5.123 | 5.096 | 5.111 | 5.134 | 5.081 | 5.129 | 5.116 | 5.130 | 5.115 |
| 3d17-45 | 4.063 | 4.030 | 4.031 | 4.031 | 4.044 | 4.032 | 4.041 | 4.023 | 4.060 | 4.023 |
| 3d17-46 | 4.776 | 4.762 | 4.761 | 4.756 | 4.770 | 4.740 | 4.763 | 4.737 | 4.782 | 4.750 |
| 3d17-47 | 5.000 | 4.927 | 4.920 | 4.889 | 4.939 | 4.870 | 4.933 | 4.897 | 4.926 | 4.898 |
| 3d17-48 | 3.992 | 3.972 | 3.918 | 3.929 | 3.952 | 3.921 | 3.957 | 3.934 | 3.964 | 3.929 |
| 3d17-49 | 5.074 | 5.004 | 5.002 | 4.960 | 5.034 | 4.967 | 5.034 | 5.001 | 5.075 | 4.966 |
| 3d17-50 | 4.193 | 4.196 | 4.168 | 4.159 | 4.211 | 4.137 | 4.179 | 4.150 | 4.165 | 4.164 |
| Problem | 1point | uniform | nn2-1p | nn2-u | nn3-1p | nn3-u | nn4-1p | nn4-u | nn5-1p | nn5-u |
|---|---|---|---|---|---|---|---|---|---|---|
| 3d100-01 | 36.232 | 34.854 | 18.671 | 18.835 | 20.142 | 20.292 | 21.720 | 21.207 | 21.765 | 22.679 |
| 3d100-02 | 34.573 | 33.259 | 19.037 | 18.979 | 20.215 | 20.157 | 21.198 | 21.007 | 22.456 | 22.480 |
| 3d100-03 | 35.802 | 34.479 | 18.935 | 18.634 | 20.033 | 19.909 | 21.135 | 21.499 | 22.705 | 22.570 |
| 3d100-04 | 33.835 | 32.816 | 17.176 | 17.576 | 18.806 | 18.783 | 19.906 | 19.971 | 21.118 | 20.862 |
| 3d100-05 | 35.439 | 34.515 | 18.144 | 18.296 | 19.703 | 19.857 | 21.286 | 20.969 | 22.481 | 22.182 |
| 3d100-06 | 34.906 | 34.197 | 17.886 | 18.141 | 19.252 | 19.495 | 20.757 | 20.658 | 21.686 | 21.700 |
| 3d100-07 | 34.889 | 33.410 | 17.982 | 17.743 | 19.440 | 18.709 | 20.965 | 20.878 | 22.414 | 21.857 |
| 3d100-08 | 33.928 | 32.689 | 18.042 | 17.980 | 19.393 | 19.423 | 20.729 | 20.367 | 21.616 | 21.773 |
| 3d100-09 | 35.050 | 34.024 | 18.073 | 18.072 | 19.736 | 19.372 | 20.981 | 20.456 | 21.787 | 22.139 |
| 3d100-10 | 35.292 | 32.833 | 17.997 | 17.894 | 19.283 | 19.097 | 20.796 | 20.359 | 21.756 | 22.023 |
| 3d100-11 | 34.838 | 33.584 | 17.702 | 17.546 | 19.265 | 19.097 | 20.200 | 20.629 | 21.544 | 21.610 |
| 3d100-12 | 33.839 | 33.462 | 18.466 | 18.402 | 19.544 | 19.859 | 20.764 | 21.208 | 22.516 | 22.441 |
| 3d100-13 | 35.436 | 33.792 | 17.825 | 17.850 | 19.602 | 19.391 | 21.016 | 20.466 | 22.102 | 22.038 |
| 3d100-14 | 34.308 | 33.354 | 17.842 | 17.667 | 19.306 | 19.167 | 19.822 | 20.117 | 20.821 | 20.814 |
| 3d100-15 | 34.479 | 33.109 | 18.264 | 18.312 | 19.281 | 19.249 | 20.385 | 20.365 | 21.470 | 21.495 |
| 3d100-16 | 35.579 | 33.642 | 18.598 | 18.639 | 19.480 | 20.189 | 20.920 | 21.424 | 22.436 | 22.192 |
| 3d100-17 | 34.960 | 34.154 | 18.377 | 18.451 | 19.597 | 19.663 | 20.825 | 20.850 | 22.147 | 22.154 |
| 3d100-18 | 36.004 | 34.701 | 17.759 | 17.922 | 19.678 | 19.419 | 21.024 | 20.486 | 21.726 | 22.168 |
| 3d100-19 | 35.328 | 34.601 | 17.964 | 18.068 | 19.857 | 19.660 | 20.951 | 21.051 | 22.450 | 22.366 |
| 3d100-20 | 35.438 | 34.038 | 18.875 | 18.565 | 20.011 | 19.939 | 21.420 | 21.157 | 22.702 | 22.586 |
| 3d100-21 | 35.134 | 34.114 | 18.301 | 18.266 | 19.425 | 19.722 | 20.962 | 21.000 | 21.798 | 22.150 |
| 3d100-22 | 33.946 | 32.796 | 17.389 | 17.135 | 19.125 | 18.923 | 20.092 | 20.202 | 21.201 | 20.957 |
| 3d100-23 | 35.531 | 34.181 | 17.942 | 17.902 | 19.693 | 19.750 | 21.381 | 20.711 | 22.452 | 22.274 |
| 3d100-24 | 33.234 | 32.337 | 17.132 | 17.195 | 18.563 | 18.665 | 20.222 | 20.109 | 21.234 | 20.838 |
| 3d100-25 | 34.558 | 33.984 | 18.624 | 18.525 | 19.941 | 19.625 | 20.969 | 20.974 | 22.463 | 22.197 |
| 3d100-26 | 33.877 | 32.575 | 18.112 | 17.771 | 19.145 | 19.268 | 20.933 | 20.603 | 22.044 | 22.099 |
| 3d100-27 | 35.414 | 34.134 | 18.517 | 18.616 | 19.954 | 19.691 | 21.027 | 21.058 | 22.288 | 22.372 |
| 3d100-28 | 34.098 | 33.535 | 17.802 | 17.928 | 19.526 | 19.737 | 21.096 | 20.898 | 22.425 | 22.447 |
| 3d100-29 | 34.637 | 33.643 | 17.555 | 17.752 | 18.839 | 18.834 | 20.208 | 19.829 | 21.685 | 21.184 |
| 3d100-30 | 33.250 | 32.719 | 17.682 | 17.629 | 19.069 | 18.870 | 20.410 | 20.265 | 21.208 | 20.963 |
| 3d100-31 | 35.197 | 34.159 | 18.591 | 18.531 | 19.780 | 20.071 | 21.098 | 20.920 | 21.958 | 21.970 |
| 3d100-32 | 35.621 | 34.771 | 18.660 | 18.726 | 20.215 | 20.124 | 21.783 | 21.729 | 22.487 | 22.528 |
| 3d100-33 | 35.027 | 33.440 | 18.103 | 18.155 | 19.855 | 19.893 | 20.849 | 20.893 | 22.339 | 21.992 |
| 3d100-34 | 35.470 | 33.719 | 18.799 | 18.757 | 20.354 | 20.158 | 21.615 | 21.289 | 22.214 | 22.555 |
| 3d100-35 | 35.405 | 33.807 | 17.881 | 17.835 | 19.287 | 19.264 | 20.743 | 21.083 | 22.077 | 22.201 |
| 3d100-36 | 33.498 | 32.354 | 17.310 | 17.293 | 19.286 | 18.756 | 20.276 | 20.505 | 21.327 | 21.321 |
| 3d100-37 | 34.724 | 33.408 | 17.739 | 17.850 | 18.788 | 19.392 | 20.675 | 20.588 | 21.692 | 21.419 |
| 3d100-38 | 35.973 | 34.461 | 18.442 | 18.585 | 19.932 | 19.801 | 20.706 | 20.954 | 22.540 | 22.515 |
| 3d100-39 | 33.648 | 31.600 | 16.778 | 16.562 | 17.796 | 18.284 | 19.070 | 18.870 | 20.182 | 20.235 |
| 3d100-40 | 35.333 | 34.191 | 17.704 | 17.731 | 19.155 | 18.984 | 20.364 | 20.853 | 21.880 | 21.966 |
| 3d100-41 | 34.658 | 33.960 | 18.531 | 18.307 | 19.581 | 19.746 | 20.774 | 20.791 | 22.419 | 21.561 |
| 3d100-42 | 33.927 | 33.164 | 17.354 | 17.267 | 19.087 | 19.334 | 20.480 | 20.693 | 21.510 | 21.811 |
| 3d100-43 | 35.062 | 33.914 | 17.156 | 17.221 | 18.617 | 18.860 | 19.559 | 20.427 | 21.471 | 21.299 |
| 3d100-44 | 36.050 | 33.875 | 17.554 | 17.716 | 19.120 | 19.210 | 20.493 | 20.657 | 21.709 | 21.369 |
| 3d100-45 | 35.893 | 34.190 | 18.197 | 18.539 | 19.972 | 20.104 | 21.253 | 21.255 | 22.566 | 22.602 |
| 3d100-46 | 35.284 | 33.162 | 18.807 | 18.833 | 20.014 | 19.780 | 20.884 | 21.418 | 22.502 | 22.673 |
| 3d100-47 | 33.986 | 32.761 | 17.416 | 17.423 | 19.092 | 19.063 | 20.364 | 20.542 | 21.425 | 21.211 |
| 3d100-48 | 35.787 | 34.452 | 18.298 | 18.409 | 19.827 | 19.582 | 21.309 | 21.169 | 21.738 | 22.309 |
| 3d100-49 | 35.566 | 33.847 | 18.105 | 18.152 | 19.653 | 19.434 | 20.817 | 21.024 | 21.973 | 22.134 |
| 3d100-50 | 34.048 | 32.914 | 17.549 | 17.541 | 18.979 | 18.887 | 19.638 | 20.280 | 21.402 | 20.783 |
| Problem | 1point | uniform | nn2-1p | nn2-u | nn3-1p | nn3-u | nn4-1p | nn4-u | nn5-1p | nn5-u |
|---|---|---|---|---|---|---|---|---|---|---|
| 3d100-01 | 36.855 | 35.897 | 19.161 | 19.212 | 20.638 | 20.656 | 21.998 | 21.979 | 22.994 | 23.138 |
| 3d100-02 | 35.245 | 34.240 | 19.189 | 19.257 | 20.521 | 20.462 | 21.590 | 21.642 | 22.886 | 22.897 |
| 3d100-03 | 36.390 | 35.202 | 19.048 | 19.037 | 20.383 | 20.478 | 21.853 | 21.882 | 23.048 | 23.159 |
| 3d100-04 | 34.493 | 33.498 | 17.700 | 17.864 | 19.309 | 19.298 | 20.374 | 20.268 | 21.523 | 21.619 |
| 3d100-05 | 36.365 | 35.141 | 18.415 | 18.476 | 20.111 | 20.177 | 21.571 | 21.729 | 22.924 | 22.819 |
| 3d100-06 | 35.732 | 34.515 | 18.338 | 18.298 | 19.644 | 19.734 | 20.992 | 20.982 | 22.305 | 22.169 |
| 3d100-07 | 35.470 | 34.168 | 18.244 | 18.103 | 19.636 | 19.470 | 21.258 | 21.390 | 22.583 | 22.511 |
| 3d100-08 | 34.551 | 33.375 | 18.398 | 18.272 | 19.795 | 19.751 | 21.152 | 21.036 | 22.093 | 22.209 |
| 3d100-09 | 36.036 | 34.718 | 18.343 | 18.343 | 20.033 | 19.934 | 21.106 | 20.996 | 22.389 | 22.490 |
| 3d100-10 | 35.886 | 34.036 | 18.261 | 18.222 | 19.733 | 19.649 | 21.010 | 20.906 | 22.302 | 22.237 |
| 3d100-11 | 35.691 | 34.300 | 17.982 | 18.018 | 19.676 | 19.398 | 20.980 | 21.045 | 22.161 | 22.152 |
| 3d100-12 | 35.142 | 34.182 | 18.793 | 18.839 | 20.248 | 20.337 | 21.630 | 21.516 | 22.790 | 22.651 |
| 3d100-13 | 36.015 | 34.422 | 18.334 | 18.235 | 19.780 | 19.702 | 21.190 | 21.043 | 22.503 | 22.464 |
| 3d100-14 | 35.267 | 33.951 | 18.021 | 17.966 | 19.518 | 19.512 | 20.609 | 20.571 | 21.741 | 21.623 |
| 3d100-15 | 34.978 | 33.959 | 18.498 | 18.518 | 19.600 | 19.604 | 20.627 | 20.747 | 21.730 | 21.890 |
| 3d100-16 | 36.195 | 34.811 | 18.769 | 18.829 | 20.361 | 20.575 | 21.705 | 21.945 | 22.957 | 22.950 |
| 3d100-17 | 36.114 | 34.730 | 18.685 | 18.627 | 20.009 | 19.998 | 21.282 | 21.301 | 22.468 | 22.580 |
| 3d100-18 | 36.495 | 35.410 | 18.238 | 18.176 | 19.897 | 19.980 | 21.443 | 21.430 | 22.597 | 22.853 |
| 3d100-19 | 36.135 | 35.004 | 18.200 | 18.301 | 20.137 | 20.208 | 21.373 | 21.382 | 22.793 | 22.645 |
| 3d100-20 | 36.122 | 35.551 | 19.068 | 18.902 | 20.300 | 20.453 | 21.923 | 21.840 | 23.119 | 23.285 |
| 3d100-21 | 36.515 | 35.263 | 18.606 | 18.573 | 20.045 | 20.130 | 21.512 | 21.428 | 22.545 | 22.615 |
| 3d100-22 | 34.601 | 33.377 | 17.599 | 17.571 | 19.340 | 19.263 | 20.374 | 20.587 | 21.694 | 21.507 |
| 3d100-23 | 35.938 | 34.823 | 18.214 | 18.165 | 20.009 | 19.979 | 21.636 | 21.524 | 22.746 | 22.803 |
| 3d100-24 | 34.137 | 32.914 | 17.438 | 17.456 | 19.093 | 19.144 | 20.660 | 20.598 | 21.841 | 21.738 |
| 3d100-25 | 35.704 | 34.635 | 18.828 | 18.784 | 20.320 | 20.242 | 21.612 | 21.446 | 22.910 | 22.744 |
| 3d100-26 | 34.642 | 33.547 | 18.297 | 18.304 | 19.744 | 19.867 | 21.350 | 21.194 | 22.278 | 22.562 |
| 3d100-27 | 36.308 | 35.013 | 18.788 | 18.735 | 20.155 | 19.987 | 21.504 | 21.515 | 22.854 | 22.843 |
| 3d100-28 | 35.306 | 34.006 | 18.335 | 18.419 | 19.978 | 20.101 | 21.546 | 21.362 | 22.619 | 22.619 |
| 3d100-29 | 35.599 | 34.477 | 17.881 | 17.921 | 19.198 | 19.168 | 20.602 | 20.545 | 21.969 | 21.803 |
| 3d100-30 | 34.408 | 33.590 | 17.997 | 17.909 | 19.309 | 19.268 | 20.557 | 20.624 | 21.629 | 21.598 |
| 3d100-31 | 35.964 | 34.686 | 18.842 | 18.862 | 20.137 | 20.272 | 21.359 | 21.359 | 22.448 | 22.501 |
| 3d100-32 | 36.647 | 35.322 | 18.830 | 18.925 | 20.635 | 20.584 | 22.055 | 22.053 | 23.262 | 23.077 |
| 3d100-33 | 35.910 | 34.547 | 18.342 | 18.434 | 19.979 | 19.993 | 21.212 | 21.240 | 22.569 | 22.495 |
| 3d100-34 | 35.965 | 34.526 | 19.018 | 18.912 | 20.605 | 20.444 | 21.947 | 21.829 | 23.103 | 23.277 |
| 3d100-35 | 36.607 | 35.265 | 18.022 | 18.099 | 19.589 | 19.606 | 21.015 | 21.192 | 22.306 | 22.487 |
| 3d100-36 | 34.154 | 32.804 | 17.678 | 17.780 | 19.523 | 19.409 | 20.638 | 20.805 | 21.782 | 21.763 |
| 3d100-37 | 35.145 | 33.767 | 18.013 | 18.124 | 19.575 | 19.608 | 20.978 | 21.006 | 22.179 | 22.208 |
| 3d100-38 | 36.743 | 35.920 | 18.844 | 18.863 | 20.415 | 20.207 | 21.682 | 21.737 | 22.973 | 22.859 |
| 3d100-39 | 33.923 | 32.404 | 16.983 | 16.940 | 18.350 | 18.454 | 19.507 | 19.405 | 20.758 | 20.980 |
| 3d100-40 | 36.134 | 34.829 | 18.019 | 18.011 | 19.592 | 19.459 | 21.033 | 21.145 | 22.334 | 22.342 |
| 3d100-41 | 35.773 | 34.509 | 18.720 | 18.632 | 19.929 | 19.984 | 21.049 | 21.188 | 22.673 | 22.532 |
| 3d100-42 | 34.812 | 33.695 | 17.734 | 17.707 | 19.497 | 19.563 | 20.922 | 20.922 | 22.178 | 22.228 |
| 3d100-43 | 36.208 | 34.551 | 17.393 | 17.469 | 19.072 | 19.270 | 20.351 | 20.643 | 21.863 | 21.795 |
| 3d100-44 | 36.548 | 34.686 | 17.923 | 17.903 | 19.515 | 19.598 | 20.945 | 20.877 | 22.053 | 22.083 |
| 3d100-45 | 36.235 | 34.881 | 18.758 | 18.813 | 20.436 | 20.494 | 21.815 | 21.772 | 23.110 | 23.291 |
| 3d100-46 | 36.006 | 34.878 | 19.111 | 19.008 | 20.343 | 20.456 | 21.635 | 21.675 | 22.812 | 22.940 |
| 3d100-47 | 34.665 | 33.584 | 17.751 | 17.673 | 19.341 | 19.309 | 20.865 | 20.892 | 22.014 | 21.755 |
| 3d100-48 | 36.367 | 35.053 | 18.705 | 18.748 | 20.157 | 20.156 | 21.664 | 21.602 | 22.613 | 22.855 |
| 3d100-49 | 36.724 | 35.492 | 18.389 | 18.473 | 20.030 | 20.040 | 21.326 | 21.412 | 22.606 | 22.586 |
| 3d100-50 | 35.201 | 33.867 | 17.886 | 17.832 | 19.406 | 19.317 | 20.303 | 20.558 | 21.730 | 21.483 |
| Problem | mst2-1p | mst2-u | mst3-1p | mst3-u | mst4-1p | mst4-u | mst5-1p | mst5-u |
|---|---|---|---|---|---|---|---|---|
| 3d17-01 | 4.329 | 4.329 | 4.329 | 4.337 | 4.333 | 4.329 | 4.340 | 4.329 |
| 3d17-02 | 4.496 | 4.493 | 4.493 | 4.493 | 4.496 | 4.493 | 4.529 | 4.493 |
| 3d17-03 | 4.373 | 4.373 | 4.373 | 4.373 | 4.374 | 4.373 | 4.405 | 4.373 |
| 3d17-04 | 4.236 | 4.235 | 4.273 | 4.236 | 4.257 | 4.236 | 4.283 | 4.235 |
| 3d17-05 | 3.768 | 3.750 | 3.750 | 3.750 | 3.768 | 3.750 | 3.795 | 3.750 |
| 3d17-06 | 4.705 | 4.705 | 4.705 | 4.705 | 4.731 | 4.705 | 4.705 | 4.705 |
| 3d17-07 | 4.544 | 4.545 | 4.526 | 4.522 | 4.562 | 4.549 | 4.551 | 4.544 |
| 3d17-08 | 4.560 | 4.560 | 4.571 | 4.560 | 4.560 | 4.560 | 4.560 | 4.570 |
| 3d17-09 | 4.124 | 4.124 | 4.124 | 4.124 | 4.124 | 4.124 | 4.124 | 4.124 |
| 3d17-10 | 4.144 | 4.125 | 4.125 | 4.125 | 4.155 | 4.125 | 4.143 | 4.125 |
| 3d17-11 | 4.434 | 4.434 | 4.434 | 4.434 | 4.433 | 4.434 | 4.434 | 4.434 |
| 3d17-12 | 4.018 | 4.016 | 4.016 | 4.017 | 4.043 | 4.016 | 4.016 | 4.016 |
| 3d17-13 | 4.789 | 4.783 | 4.799 | 4.783 | 4.788 | 4.786 | 4.797 | 4.786 |
| 3d17-14 | 4.384 | 4.383 | 4.394 | 4.393 | 4.378 | 4.375 | 4.400 | 4.375 |
| 3d17-15 | 4.845 | 4.844 | 4.844 | 4.844 | 4.843 | 4.856 | 4.845 | 4.848 |
| 3d17-16 | 4.613 | 4.613 | 4.612 | 4.612 | 4.612 | 4.613 | 4.613 | 4.612 |
| 3d17-17 | 4.484 | 4.484 | 4.485 | 4.485 | 4.506 | 4.484 | 4.533 | 4.498 |
| 3d17-18 | 4.152 | 4.113 | 4.146 | 4.116 | 4.130 | 4.116 | 4.157 | 4.113 |
| 3d17-19 | 4.297 | 4.298 | 4.300 | 4.288 | 4.282 | 4.286 | 4.288 | 4.298 |
| 3d17-20 | 4.301 | 4.296 | 4.300 | 4.296 | 4.296 | 4.296 | 4.301 | 4.296 |
| 3d17-21 | 4.452 | 4.451 | 4.451 | 4.452 | 4.455 | 4.451 | 4.461 | 4.451 |
| 3d17-22 | 3.971 | 3.961 | 3.979 | 3.968 | 3.968 | 3.968 | 3.961 | 3.970 |
| 3d17-23 | 4.310 | 4.310 | 4.350 | 4.339 | 4.329 | 4.339 | 4.310 | 4.310 |
| 3d17-24 | 3.949 | 3.943 | 3.937 | 3.949 | 3.949 | 3.943 | 3.949 | 3.943 |
| 3d17-25 | 4.625 | 4.625 | 4.627 | 4.625 | 4.627 | 4.625 | 4.625 | 4.625 |
| 3d17-26 | 4.614 | 4.607 | 4.618 | 4.607 | 4.639 | 4.607 | 4.655 | 4.618 |
| 3d17-27 | 4.763 | 4.763 | 4.759 | 4.755 | 4.765 | 4.755 | 4.763 | 4.756 |
| 3d17-28 | 4.246 | 4.246 | 4.247 | 4.246 | 4.251 | 4.246 | 4.247 | 4.247 |
| 3d17-29 | 4.225 | 4.217 | 4.224 | 4.217 | 4.218 | 4.214 | 4.218 | 4.221 |
| 3d17-30 | 4.684 | 4.657 | 4.666 | 4.656 | 4.662 | 4.684 | 4.700 | 4.662 |
| 3d17-31 | 4.260 | 4.248 | 4.259 | 4.257 | 4.257 | 4.268 | 4.258 | 4.248 |
| 3d17-32 | 4.389 | 4.389 | 4.389 | 4.389 | 4.389 | 4.389 | 4.415 | 4.389 |
| 3d17-33 | 4.477 | 4.474 | 4.474 | 4.474 | 4.487 | 4.475 | 4.489 | 4.475 |
| 3d17-34 | 4.286 | 4.282 | 4.280 | 4.280 | 4.308 | 4.282 | 4.282 | 4.282 |
| 3d17-35 | 4.888 | 4.878 | 4.878 | 4.878 | 4.888 | 4.878 | 4.893 | 4.878 |
| 3d17-36 | 4.277 | 4.288 | 4.287 | 4.287 | 4.277 | 4.269 | 4.272 | 4.287 |
| 3d17-37 | 4.453 | 4.453 | 4.453 | 4.453 | 4.467 | 4.466 | 4.453 | 4.453 |
| 3d17-38 | 4.938 | 4.943 | 4.938 | 4.943 | 4.959 | 4.938 | 4.949 | 4.948 |
| 3d17-39 | 4.344 | 4.341 | 4.349 | 4.343 | 4.345 | 4.341 | 4.345 | 4.344 |
| 3d17-40 | 4.105 | 4.103 | 4.103 | 4.099 | 4.103 | 4.103 | 4.130 | 4.101 |
| 3d17-41 | 4.466 | 4.466 | 4.466 | 4.466 | 4.466 | 4.466 | 4.470 | 4.466 |
| 3d17-42 | 4.107 | 4.107 | 4.108 | 4.107 | 4.109 | 4.108 | 4.107 | 4.107 |
| 3d17-43 | 4.408 | 4.403 | 4.408 | 4.403 | 4.432 | 4.410 | 4.408 | 4.410 |
| 3d17-44 | 4.947 | 4.947 | 4.947 | 4.947 | 4.947 | 4.947 | 4.961 | 4.947 |
| 3d17-45 | 3.979 | 3.978 | 3.995 | 3.994 | 3.979 | 3.994 | 4.009 | 3.979 |
| 3d17-46 | 4.704 | 4.704 | 4.706 | 4.704 | 4.727 | 4.709 | 4.735 | 4.711 |
| 3d17-47 | 4.741 | 4.738 | 4.741 | 4.741 | 4.741 | 4.738 | 4.760 | 4.738 |
| 3d17-48 | 3.899 | 3.899 | 3.891 | 3.867 | 3.913 | 3.875 | 3.911 | 3.891 |
| 3d17-49 | 4.820 | 4.805 | 4.838 | 4.805 | 4.805 | 4.820 | 4.827 | 4.805 |
| 3d17-50 | 4.109 | 4.128 | 4.145 | 4.128 | 4.128 | 4.128 | 4.124 | 4.132 |
| Problem | mst2-1p | mst2-u | mst3-1p | mst3-u | mst4-1p | mst4-u | mst5-1p | mst5-u |
|---|---|---|---|---|---|---|---|---|
| 3d17-01 | 4.359 | 4.342 | 4.385 | 4.367 | 4.388 | 4.356 | 4.417 | 4.374 |
| 3d17-02 | 4.551 | 4.522 | 4.541 | 4.521 | 4.561 | 4.536 | 4.564 | 4.541 |
| 3d17-03 | 4.422 | 4.397 | 4.415 | 4.408 | 4.428 | 4.391 | 4.450 | 4.404 |
| 3d17-04 | 4.284 | 4.301 | 4.319 | 4.303 | 4.348 | 4.306 | 4.344 | 4.276 |
| 3d17-05 | 3.817 | 3.794 | 3.805 | 3.794 | 3.833 | 3.797 | 3.832 | 3.791 |
| 3d17-06 | 4.755 | 4.739 | 4.753 | 4.725 | 4.760 | 4.733 | 4.765 | 4.741 |
| 3d17-07 | 4.581 | 4.584 | 4.579 | 4.566 | 4.603 | 4.577 | 4.618 | 4.580 |
| 3d17-08 | 4.605 | 4.581 | 4.632 | 4.585 | 4.623 | 4.589 | 4.655 | 4.610 |
| 3d17-09 | 4.131 | 4.124 | 4.165 | 4.144 | 4.175 | 4.133 | 4.185 | 4.147 |
| 3d17-10 | 4.163 | 4.155 | 4.181 | 4.149 | 4.198 | 4.154 | 4.197 | 4.143 |
| 3d17-11 | 4.480 | 4.457 | 4.503 | 4.448 | 4.477 | 4.477 | 4.523 | 4.474 |
| 3d17-12 | 4.065 | 4.042 | 4.048 | 4.042 | 4.082 | 4.050 | 4.063 | 4.035 |
| 3d17-13 | 4.812 | 4.799 | 4.818 | 4.797 | 4.816 | 4.812 | 4.824 | 4.811 |
| 3d17-14 | 4.413 | 4.405 | 4.418 | 4.413 | 4.431 | 4.402 | 4.428 | 4.407 |
| 3d17-15 | 4.877 | 4.866 | 4.891 | 4.865 | 4.885 | 4.882 | 4.884 | 4.863 |
| 3d17-16 | 4.637 | 4.625 | 4.634 | 4.624 | 4.678 | 4.644 | 4.674 | 4.648 |
| 3d17-17 | 4.519 | 4.510 | 4.532 | 4.510 | 4.562 | 4.515 | 4.601 | 4.530 |
| 3d17-18 | 4.194 | 4.171 | 4.192 | 4.168 | 4.180 | 4.193 | 4.216 | 4.170 |
| 3d17-19 | 4.323 | 4.321 | 4.327 | 4.320 | 4.332 | 4.322 | 4.329 | 4.335 |
| 3d17-20 | 4.319 | 4.306 | 4.320 | 4.305 | 4.324 | 4.312 | 4.346 | 4.309 |
| 3d17-21 | 4.481 | 4.463 | 4.483 | 4.464 | 4.482 | 4.470 | 4.496 | 4.470 |
| 3d17-22 | 3.998 | 3.983 | 4.006 | 3.981 | 4.015 | 4.006 | 4.012 | 3.988 |
| 3d17-23 | 4.348 | 4.344 | 4.368 | 4.372 | 4.372 | 4.363 | 4.383 | 4.353 |
| 3d17-24 | 3.972 | 3.962 | 3.965 | 3.965 | 3.978 | 3.964 | 3.988 | 3.959 |
| 3d17-25 | 4.653 | 4.641 | 4.665 | 4.648 | 4.650 | 4.648 | 4.665 | 4.656 |
| 3d17-26 | 4.655 | 4.638 | 4.699 | 4.661 | 4.742 | 4.683 | 4.735 | 4.690 |
| 3d17-27 | 4.811 | 4.786 | 4.822 | 4.785 | 4.821 | 4.801 | 4.843 | 4.805 |
| 3d17-28 | 4.264 | 4.257 | 4.272 | 4.266 | 4.276 | 4.267 | 4.284 | 4.270 |
| 3d17-29 | 4.259 | 4.226 | 4.249 | 4.242 | 4.266 | 4.227 | 4.266 | 4.233 |
| 3d17-30 | 4.707 | 4.696 | 4.708 | 4.690 | 4.725 | 4.705 | 4.719 | 4.697 |
| 3d17-31 | 4.292 | 4.283 | 4.296 | 4.296 | 4.296 | 4.302 | 4.311 | 4.265 |
| 3d17-32 | 4.429 | 4.399 | 4.429 | 4.411 | 4.477 | 4.402 | 4.446 | 4.421 |
| 3d17-33 | 4.504 | 4.489 | 4.496 | 4.498 | 4.512 | 4.492 | 4.516 | 4.496 |
| 3d17-34 | 4.303 | 4.298 | 4.331 | 4.295 | 4.335 | 4.304 | 4.332 | 4.300 |
| 3d17-35 | 4.914 | 4.908 | 4.919 | 4.899 | 4.923 | 4.905 | 4.925 | 4.923 |
| 3d17-36 | 4.326 | 4.328 | 4.339 | 4.311 | 4.342 | 4.324 | 4.340 | 4.339 |
| 3d17-37 | 4.498 | 4.478 | 4.518 | 4.510 | 4.536 | 4.496 | 4.529 | 4.499 |
| 3d17-38 | 5.012 | 4.984 | 4.992 | 4.997 | 5.010 | 4.975 | 5.008 | 5.005 |
| 3d17-39 | 4.362 | 4.348 | 4.364 | 4.354 | 4.376 | 4.351 | 4.368 | 4.350 |
| 3d17-40 | 4.131 | 4.116 | 4.145 | 4.113 | 4.138 | 4.131 | 4.150 | 4.117 |
| 3d17-41 | 4.478 | 4.475 | 4.496 | 4.470 | 4.494 | 4.475 | 4.486 | 4.479 |
| 3d17-42 | 4.125 | 4.113 | 4.166 | 4.119 | 4.156 | 4.123 | 4.177 | 4.127 |
| 3d17-43 | 4.471 | 4.439 | 4.489 | 4.440 | 4.495 | 4.460 | 4.473 | 4.456 |
| 3d17-44 | 4.968 | 4.955 | 4.993 | 4.971 | 5.003 | 4.964 | 5.019 | 4.994 |
| 3d17-45 | 4.014 | 4.006 | 4.018 | 4.012 | 4.015 | 4.024 | 4.036 | 4.018 |
| 3d17-46 | 4.745 | 4.745 | 4.752 | 4.743 | 4.767 | 4.740 | 4.773 | 4.751 |
| 3d17-47 | 4.776 | 4.789 | 4.847 | 4.797 | 4.809 | 4.817 | 4.864 | 4.793 |
| 3d17-48 | 3.938 | 3.938 | 3.937 | 3.923 | 3.948 | 3.926 | 3.957 | 3.933 |
| 3d17-49 | 4.854 | 4.856 | 4.910 | 4.851 | 4.879 | 4.883 | 4.911 | 4.834 |
| 3d17-50 | 4.147 | 4.143 | 4.169 | 4.143 | 4.170 | 4.146 | 4.164 | 4.150 |
| Problem | mst2-1p | mst2-u | mst3-1p | mst3-u | mst4-1p | mst4-u | mst5-1p | mst5-u |
|---|---|---|---|---|---|---|---|---|
| 3d100-01 | 16.980 | 16.853 | 18.651 | 18.752 | 20.025 | 20.112 | 21.283 | 21.361 |
| 3d100-02 | 16.181 | 16.428 | 17.569 | 17.815 | 19.023 | 19.134 | 20.451 | 19.906 |
| 3d100-03 | 16.680 | 16.823 | 18.611 | 18.512 | 20.088 | 19.675 | 21.074 | 20.465 |
| 3d100-04 | 15.102 | 14.921 | 16.762 | 16.790 | 18.136 | 17.982 | 18.978 | 19.092 |
| 3d100-05 | 16.311 | 16.375 | 17.942 | 18.183 | 19.365 | 19.611 | 20.937 | 21.268 |
| 3d100-06 | 15.784 | 16.056 | 17.466 | 17.871 | 19.168 | 19.161 | 20.570 | 20.344 |
| 3d100-07 | 15.839 | 16.073 | 17.544 | 17.130 | 19.013 | 18.367 | 20.138 | 20.576 |
| 3d100-08 | 16.062 | 16.233 | 17.678 | 17.726 | 19.079 | 18.978 | 20.167 | 20.149 |
| 3d100-09 | 16.296 | 16.155 | 18.188 | 17.753 | 19.407 | 18.906 | 19.896 | 20.650 |
| 3d100-10 | 15.753 | 15.838 | 17.290 | 17.030 | 19.192 | 18.825 | 19.683 | 19.946 |
| 3d100-11 | 15.751 | 15.813 | 17.273 | 17.367 | 18.801 | 19.115 | 20.553 | 20.210 |
| 3d100-12 | 16.237 | 16.150 | 17.761 | 18.066 | 19.440 | 19.668 | 20.663 | 20.535 |
| 3d100-13 | 15.912 | 15.944 | 17.497 | 17.812 | 19.250 | 19.707 | 20.724 | 20.729 |
| 3d100-14 | 15.462 | 15.506 | 16.890 | 17.161 | 18.472 | 18.581 | 19.601 | 19.309 |
| 3d100-15 | 16.362 | 16.110 | 17.688 | 17.817 | 19.134 | 19.312 | 20.125 | 19.969 |
| 3d100-16 | 16.831 | 16.822 | 18.463 | 18.472 | 19.868 | 19.473 | 21.300 | 21.401 |
| 3d100-17 | 16.373 | 16.336 | 17.759 | 17.856 | 19.599 | 19.570 | 20.913 | 20.455 |
| 3d100-18 | 16.165 | 15.943 | 17.418 | 17.496 | 19.122 | 19.438 | 20.069 | 20.312 |
| 3d100-19 | 16.137 | 16.016 | 18.017 | 17.868 | 19.368 | 19.539 | 20.294 | 19.991 |
| 3d100-20 | 16.196 | 16.456 | 17.889 | 18.201 | 19.564 | 19.308 | 20.916 | 21.152 |
| 3d100-21 | 15.997 | 15.582 | 17.743 | 17.795 | 19.241 | 19.352 | 20.414 | 20.757 |
| 3d100-22 | 15.593 | 15.474 | 17.043 | 16.975 | 18.489 | 18.535 | 19.214 | 19.602 |
| 3d100-23 | 16.146 | 16.133 | 17.021 | 17.842 | 19.613 | 19.526 | 20.274 | 19.946 |
| 3d100-24 | 15.040 | 15.500 | 17.110 | 16.978 | 18.674 | 18.805 | 20.014 | 19.908 |
| 3d100-25 | 16.513 | 16.212 | 17.670 | 18.206 | 19.413 | 19.438 | 20.304 | 20.632 |
| 3d100-26 | 15.973 | 15.929 | 17.712 | 17.844 | 19.269 | 19.059 | 20.598 | 20.370 |
| 3d100-27 | 16.365 | 16.030 | 17.789 | 18.016 | 19.590 | 19.837 | 20.974 | 20.966 |
| 3d100-28 | 16.247 | 16.109 | 17.804 | 17.762 | 18.750 | 18.837 | 20.274 | 20.342 |
| 3d100-29 | 15.612 | 15.552 | 17.270 | 17.100 | 18.794 | 18.805 | 20.093 | 19.673 |
| 3d100-30 | 15.858 | 16.153 | 17.788 | 17.551 | 18.940 | 18.775 | 19.863 | 19.889 |
| 3d100-31 | 16.657 | 16.590 | 17.939 | 18.186 | 19.596 | 19.270 | 20.722 | 20.618 |
| 3d100-32 | 16.132 | 15.883 | 17.491 | 17.753 | 18.950 | 19.232 | 20.295 | 20.529 |
| 3d100-33 | 16.609 | 16.779 | 18.544 | 18.454 | 19.847 | 20.107 | 20.861 | 21.040 |
| 3d100-34 | 16.770 | 16.771 | 18.616 | 18.095 | 20.263 | 20.019 | 21.144 | 21.165 |
| 3d100-35 | 15.998 | 15.992 | 17.368 | 17.582 | 18.526 | 18.949 | 20.222 | 20.155 |
| 3d100-36 | 14.953 | 15.153 | 16.881 | 16.821 | 17.925 | 18.627 | 20.064 | 19.859 |
| 3d100-37 | 16.155 | 16.002 | 17.875 | 17.771 | 19.230 | 18.783 | 20.262 | 20.008 |
| 3d100-38 | 16.021 | 16.206 | 17.649 | 17.456 | 19.085 | 19.043 | 20.515 | 20.953 |
| 3d100-39 | 15.033 | 14.838 | 16.447 | 16.370 | 17.534 | 17.847 | 18.610 | 18.979 |
| 3d100-40 | 15.853 | 15.887 | 17.554 | 17.470 | 19.362 | 18.951 | 20.708 | 20.344 |
| 3d100-41 | 16.166 | 16.164 | 17.824 | 17.767 | 19.157 | 19.572 | 20.253 | 20.783 |
| 3d100-42 | 15.957 | 15.995 | 17.253 | 17.630 | 19.260 | 19.267 | 20.322 | 19.813 |
| 3d100-43 | 15.261 | 15.279 | 17.280 | 17.490 | 18.665 | 18.653 | 20.314 | 20.209 |
| 3d100-44 | 15.916 | 15.969 | 17.374 | 17.336 | 19.146 | 19.005 | 20.453 | 20.621 |
| 3d100-45 | 16.087 | 16.143 | 17.573 | 17.648 | 19.429 | 19.248 | 20.683 | 20.532 |
| 3d100-46 | 16.584 | 16.501 | 17.839 | 18.106 | 19.644 | 19.780 | 21.290 | 21.165 |
| 3d100-47 | 15.816 | 15.728 | 17.290 | 16.862 | 18.411 | 18.822 | 19.667 | 20.021 |
| 3d100-48 | 16.148 | 16.299 | 17.945 | 17.816 | 19.494 | 19.578 | 20.893 | 20.273 |
| 3d100-49 | 15.985 | 16.047 | 17.814 | 18.046 | 18.994 | 19.255 | 20.998 | 21.088 |
| 3d100-50 | 15.705 | 15.979 | 17.387 | 17.570 | 18.754 | 18.776 | 20.147 | 20.277 |
| Problem | mst2-1p | mst2-u | mst3-1p | mst3-u | mst4-1p | mst4-u | mst5-1p | mst5-u |
|---|---|---|---|---|---|---|---|---|
| 3d100-01 | 17.123 | 17.164 | 19.052 | 19.076 | 20.413 | 20.500 | 21.839 | 21.789 |
| 3d100-02 | 16.515 | 16.592 | 18.145 | 18.245 | 19.525 | 19.540 | 20.915 | 20.636 |
| 3d100-03 | 16.901 | 16.987 | 18.868 | 18.798 | 20.415 | 20.237 | 21.583 | 21.446 |
| 3d100-04 | 15.367 | 15.287 | 16.975 | 17.036 | 18.476 | 18.358 | 19.524 | 19.622 |
| 3d100-05 | 16.711 | 16.624 | 18.336 | 18.448 | 19.881 | 19.960 | 21.276 | 21.433 |
| 3d100-06 | 16.194 | 16.287 | 17.865 | 18.132 | 19.540 | 19.569 | 21.036 | 21.050 |
| 3d100-07 | 16.028 | 16.222 | 17.828 | 17.762 | 19.326 | 19.464 | 20.867 | 20.890 |
| 3d100-08 | 16.292 | 16.394 | 18.045 | 18.044 | 19.445 | 19.433 | 20.803 | 20.695 |
| 3d100-09 | 16.573 | 16.505 | 18.425 | 18.202 | 19.794 | 19.881 | 20.972 | 21.091 |
| 3d100-10 | 16.085 | 16.089 | 17.764 | 17.730 | 19.361 | 19.313 | 20.454 | 20.569 |
| 3d100-11 | 16.024 | 15.971 | 17.678 | 17.760 | 19.327 | 19.367 | 20.841 | 20.691 |
| 3d100-12 | 16.575 | 16.432 | 18.305 | 18.327 | 19.735 | 19.840 | 20.898 | 20.959 |
| 3d100-13 | 16.146 | 16.186 | 18.050 | 18.244 | 19.744 | 19.900 | 21.182 | 21.228 |
| 3d100-14 | 15.699 | 15.648 | 17.413 | 17.335 | 18.887 | 18.940 | 20.090 | 19.800 |
| 3d100-15 | 16.533 | 16.457 | 18.095 | 18.234 | 19.614 | 19.604 | 20.803 | 20.709 |
| 3d100-16 | 17.002 | 17.066 | 18.769 | 18.781 | 20.134 | 20.020 | 21.601 | 21.746 |
| 3d100-17 | 16.586 | 16.557 | 18.297 | 18.417 | 19.883 | 19.923 | 21.227 | 21.144 |
| 3d100-18 | 16.330 | 16.271 | 17.903 | 17.942 | 19.588 | 19.661 | 21.003 | 20.905 |
| 3d100-19 | 16.442 | 16.467 | 18.312 | 18.286 | 19.815 | 19.703 | 21.090 | 20.838 |
| 3d100-20 | 16.617 | 16.641 | 18.487 | 18.530 | 20.093 | 20.036 | 21.400 | 21.467 |
| 3d100-21 | 16.343 | 16.302 | 18.177 | 18.151 | 19.745 | 19.802 | 20.901 | 21.081 |
| 3d100-22 | 15.766 | 15.751 | 17.251 | 17.230 | 18.849 | 18.763 | 19.876 | 20.013 |
| 3d100-23 | 16.412 | 16.423 | 18.041 | 18.186 | 19.945 | 19.765 | 21.253 | 21.138 |
| 3d100-24 | 15.586 | 15.758 | 17.486 | 17.518 | 19.219 | 19.229 | 20.560 | 20.431 |
| 3d100-25 | 16.679 | 16.510 | 18.242 | 18.357 | 19.841 | 19.691 | 20.970 | 21.068 |
| 3d100-26 | 16.276 | 16.212 | 18.040 | 18.227 | 19.725 | 19.548 | 21.006 | 20.796 |
| 3d100-27 | 16.484 | 16.379 | 18.421 | 18.365 | 19.929 | 20.085 | 21.429 | 21.268 |
| 3d100-28 | 16.387 | 16.416 | 17.976 | 17.965 | 19.351 | 19.309 | 20.685 | 20.672 |
| 3d100-29 | 15.786 | 15.732 | 17.518 | 17.445 | 18.976 | 19.130 | 20.436 | 20.347 |
| 3d100-30 | 16.278 | 16.340 | 18.010 | 17.886 | 19.384 | 19.239 | 20.497 | 20.486 |
| 3d100-31 | 16.802 | 16.788 | 18.515 | 18.636 | 19.928 | 19.949 | 21.400 | 21.353 |
| 3d100-32 | 16.283 | 16.234 | 17.993 | 17.969 | 19.695 | 19.793 | 21.056 | 21.137 |
| 3d100-33 | 16.909 | 17.052 | 18.883 | 18.907 | 20.447 | 20.443 | 21.744 | 21.757 |
| 3d100-34 | 16.953 | 16.927 | 18.951 | 18.729 | 20.498 | 20.425 | 21.755 | 21.633 |
| 3d100-35 | 16.167 | 16.182 | 17.920 | 17.859 | 19.324 | 19.329 | 20.814 | 20.728 |
| 3d100-36 | 15.228 | 15.275 | 17.342 | 17.208 | 18.694 | 18.857 | 20.281 | 20.268 |
| 3d100-37 | 16.227 | 16.254 | 18.096 | 18.090 | 19.482 | 19.498 | 20.858 | 20.606 |
| 3d100-38 | 16.311 | 16.457 | 18.222 | 18.109 | 19.905 | 19.854 | 21.241 | 21.325 |
| 3d100-39 | 15.166 | 15.112 | 16.754 | 16.685 | 18.115 | 18.213 | 19.308 | 19.524 |
| 3d100-40 | 16.054 | 16.102 | 17.921 | 17.908 | 19.706 | 19.397 | 21.137 | 20.867 |
| 3d100-41 | 16.313 | 16.405 | 18.082 | 18.136 | 19.586 | 19.804 | 21.121 | 21.102 |
| 3d100-42 | 16.173 | 16.216 | 17.734 | 17.784 | 19.470 | 19.404 | 20.741 | 20.543 |
| 3d100-43 | 15.619 | 15.739 | 17.550 | 17.648 | 19.188 | 19.259 | 20.635 | 20.742 |
| 3d100-44 | 16.155 | 16.070 | 17.828 | 17.808 | 19.458 | 19.468 | 20.786 | 21.005 |
| 3d100-45 | 16.430 | 16.394 | 18.089 | 18.104 | 19.686 | 19.549 | 21.077 | 21.218 |
| 3d100-46 | 16.745 | 16.703 | 18.386 | 18.534 | 20.095 | 20.119 | 21.693 | 21.616 |
| 3d100-47 | 15.909 | 15.841 | 17.592 | 17.402 | 18.932 | 19.062 | 20.225 | 20.288 |
| 3d100-48 | 16.573 | 16.572 | 18.435 | 18.299 | 19.876 | 19.937 | 21.212 | 21.204 |
| 3d100-49 | 16.255 | 16.455 | 18.144 | 18.237 | 19.650 | 19.754 | 21.318 | 21.261 |
| 3d100-50 | 16.126 | 16.185 | 17.898 | 17.882 | 19.333 | 19.333 | 20.458 | 20.631 |
| Algorithm | min std | max std |
|---|---|---|
| default-1point | 0.027 | 0.133 |
| default-uniform | 0.014 | 0.101 |
| nn2-1point | 0.016 | 0.116 |
| nn2-uniform | 0.014 | 0.082 |
| nn3-1point | 0.020 | 0.102 |
| nn3-uniform | 0.009 | 0.119 |
| nn4-1point | 0.018 | 0.095 |
| nn4-uniform | 0.015 | 0.133 |
| nn5-1point | 0.019 | 0.108 |
| nn5-uniform | 0.011 | 0.121 |
| mst2-1point | 0.011 | 0.092 |
| mst2-uniform | 0.000 | 0.054 |
| mst3-1point | 0.013 | 0.073 |
| mst3-uniform | 0.005 | 0.058 |
| mst4-1point | 0.012 | 0.091 |
| mst4-uniform | 0.008 | 0.066 |
| mst5-1point | 0.014 | 0.095 |
| mst5-uniform | 0.006 | 0.062 |
| Algorithm | min std | max std |
|---|---|---|
| default-1point | 0.171 | 0.720 |
| default-uniform | 0.261 | 0.804 |
| nn2-1point | 0.081 | 0.231 |
| nn2-uniform | 0.094 | 0.233 |
| nn3-1point | 0.092 | 0.405 |
| nn3-uniform | 0.071 | 0.342 |
| nn4-1point | 0.088 | 0.425 |
| nn4-uniform | 0.092 | 0.418 |
| nn5-1point | 0.131 | 0.511 |
| nn5-uniform | 0.136 | 0.415 |
| mst2-1point | 0.073 | 0.262 |
| mst2-uniform | 0.081 | 0.285 |
| mst3-1point | 0.112 | 0.361 |
| mst3-uniform | 0.105 | 0.362 |
| mst4-1point | 0.140 | 0.370 |
| mst4-uniform | 0.108 | 0.430 |
| mst5-1point | 0.154 | 0.546 |
| mst5-uniform | 0.101 | 0.451 |
| Algorithm | Ranking |
|---|---|
| mst2-uniform | 2.28 |
| mst3-uniform | 2.56 |
| mst4-uniform | 3.64 |
| mst5-uniform | 4 |
| mst2-1point | 4.84 |
| mst3-1point | 6.36 |
| mst4-1point | 7.84 |
| mst5-1point | 8.88 |
| nn3-uniform | 9.76 |
| nn2-uniform | 10.02 |
| nn4-uniform | 10.38 |
| nn5-uniform | 11.22 |
| nn2-1point | 12.54 |
| default-uniform | 13.62 |
| nn4-1point | 15.1 |
| nn3-1point | 15.12 |
| nn5-1point | 15.56 |
| default-1point | 17.28 |
| Algorithm | p-Value (Post Hoc) |
|---|---|
| mst3-uniform | 0.793133 |
| mst4-uniform | 0.20275 |
| mst5-uniform | 0.107196 |
| mst2-1point | 0.0165 |
| mst3-1point | 0.000133 |
| mst4-1point | 0 |
| mst5-1point | 0 |
| nn3-uniform | 0 |
| nn2-uniform | 0 |
| nn4-uniform | 0 |
| nn5-uniform | 0 |
| nn2-1point | 0 |
| default-uniform | 0 |
| nn4-1point | 0 |
| nn3-1point | 0 |
| nn5-1point | 0 |
| default-1point | 0 |
| Algorithm | p-Value (Post Hoc) |
|---|---|
| mst4-uniform | 0.311771 |
| mst5-uniform | 0.177439 |
| mst2-1point | 0.032727 |
| mst3-1point | 0.000372 |
| mst4-1point | 0.000001 |
| mst5-1point | 0 |
| nn3-uniform | 0 |
| nn2-uniform | 0 |
| nn4-uniform | 0 |
| nn5-uniform | 0 |
| nn2-1point | 0 |
| default-uniform | 0 |
| nn4-1point | 0 |
| nn3-1point | 0 |
| nn5-1point | 0 |
| default-1point | 0 |
| Algorithm | Ranking |
|---|---|
| mst2-1point | 1.48 |
| mst2-uniform | 1.52 |
| mst3-uniform | 3.8 |
| mst3-1point | 3.88 |
| nn2-1point | 5.14 |
| nn2-uniform | 5.18 |
| mst4-1point | 7.72 |
| mst4-uniform | 7.78 |
| nn3-1point | 9.24 |
| nn3-uniform | 9.26 |
| mst5-uniform | 11.8 |
| mst5-1point | 11.86 |
| nn4-1point | 13.12 |
| nn4-uniform | 13.22 |
| nn5-1point | 15.5 |
| nn5-uniform | 15.5 |
| default-uniform | 17 |
| default-1point | 18 |
| Algorithm | p-Value (Post Hoc) |
|---|---|
| mst2-uniform | 0.970115 |
| mst3-uniform | 0.029789 |
| mst3-1point | 0.024589 |
| nn2-1point | 0.000608 |
| nn2-uniform | 0.00053 |
| mst4-1point | 0 |
| mst4-uniform | 0 |
| nn3-1point | 0 |
| nn3-uniform | 0 |
| mst5-uniform | 0 |
| mst5-1point | 0 |
| nn4-1point | 0 |
| nn4-uniform | 0 |
| nn5-1point | 0 |
| nn5-uniform | 0 |
| default-uniform | 0 |
| default-1point | 0 |
| Algorithm | p-Value (Post Hoc) |
|---|---|
| mst3-uniform | 0.032727 |
| mst3-1point | 0.027081 |
| nn2-1point | 0.000698 |
| nn2-uniform | 0.000608 |
| default-1point | 0 |
| default-uniform | 0 |
| nn5-1point | 0 |
| nn5-uniform | 0 |
| nn4-uniform | 0 |
| nn4-1point | 0 |
| mst5-1point | 0 |
| mst5-uniform | 0 |
| nn3-uniform | 0 |
| nn3-1point | 0 |
| mst4-uniform | 0 |
| mst4-1point | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bereta, M. Evolutionary Approach to the Euclidean Steiner Tree Problem in n-Space. Appl. Sci. 2025, 15, 1413. https://doi.org/10.3390/app15031413
Bereta M. Evolutionary Approach to the Euclidean Steiner Tree Problem in n-Space. Applied Sciences. 2025; 15(3):1413. https://doi.org/10.3390/app15031413
Chicago/Turabian StyleBereta, Michał. 2025. "Evolutionary Approach to the Euclidean Steiner Tree Problem in n-Space" Applied Sciences 15, no. 3: 1413. https://doi.org/10.3390/app15031413
APA StyleBereta, M. (2025). Evolutionary Approach to the Euclidean Steiner Tree Problem in n-Space. Applied Sciences, 15(3), 1413. https://doi.org/10.3390/app15031413