1. Introduction
A realistic and stable real-time representation of fluid has been a long-standing research issue in the field of Computer Graphics [
1,
2,
3,
4]. MC (Marching Cubes), a representative method for representing the surface of fluids, has the disadvantage of losing the model’s sharp features [
5]. DC (Dual Contouring), which overcomes this drawback, can accurately represent sharp features of objects using QEF (Quadratic Error Function), but surface normalization must precede to calculate the appropriate vertex positions [
6]. Consequently, approaches that implicitly generate surfaces need to find suitable data structures to identify more accurate vertex positions and solve optimization functions, and this process requires increasing resources and computation time as the number of polygons increases.
Fluids simulated using the SPH (Smoothed Particle Hydrodynamics) technique, unlike typical 3D models with point cloud structures, require visually representing only the surface of the fluid’s point cloud, excluding the interior [
7,
8]. This necessitates an additional process of extracting fluid surfaces. The reconstruction of fluid surfaces can only be done after calculations involving the fluid particles’ position, density, viscosity, pressure, surface tension, and external forces are completed. The time and resources needed for simulation and surface extraction depend on the dimension of the space and the number of particles [
9]. Unlike standard 3D models, which usually remain static over time, fluids continuously change their surfaces and interiors due to particle movement, requiring constant tracking of the surface in each frame. Consequently, these processes demand significant resources and computation time. Although advancements in hardware and CG technology have made realistic graphics widely accessible, mobile devices like smartphones, with limited resources, struggle to represent high-quality fluids in real time. The increased computation time due to limited resources forces a reduction in content quality to maintain real-time continuity in rendering. This quality reduction can decrease user engagement and make continuous use of the content challenging. Therefore, from a commercial perspective, it is essential to maximize graphics quality with limited resources to ensure sustained user engagement with the content.
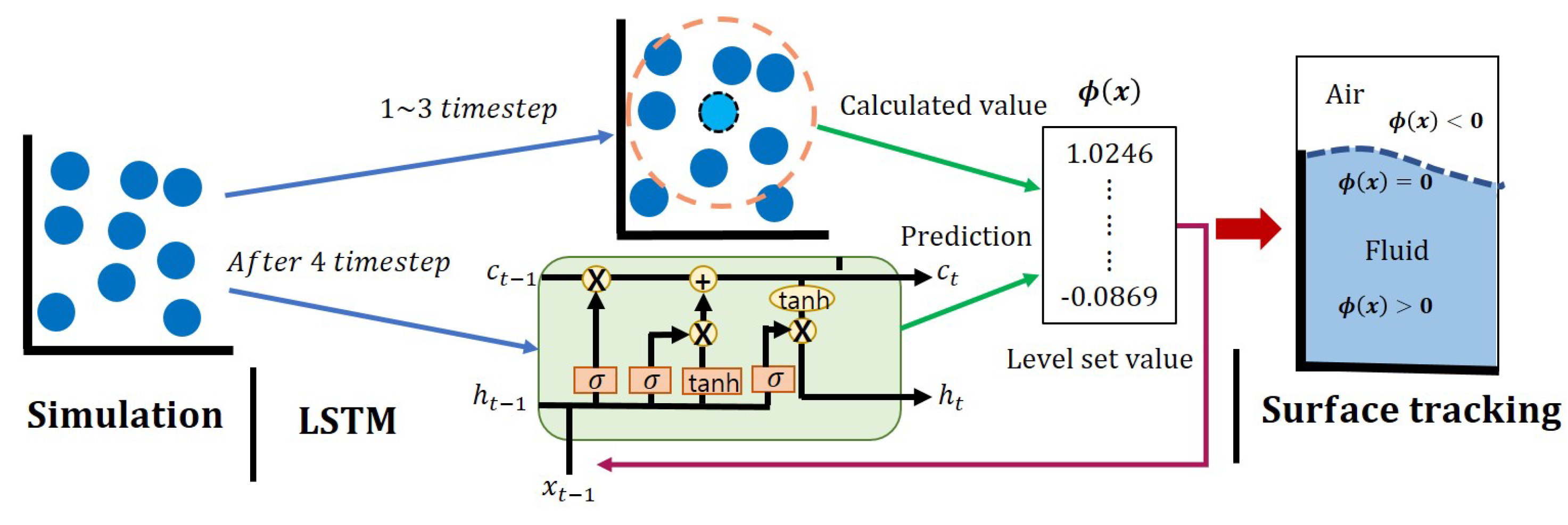
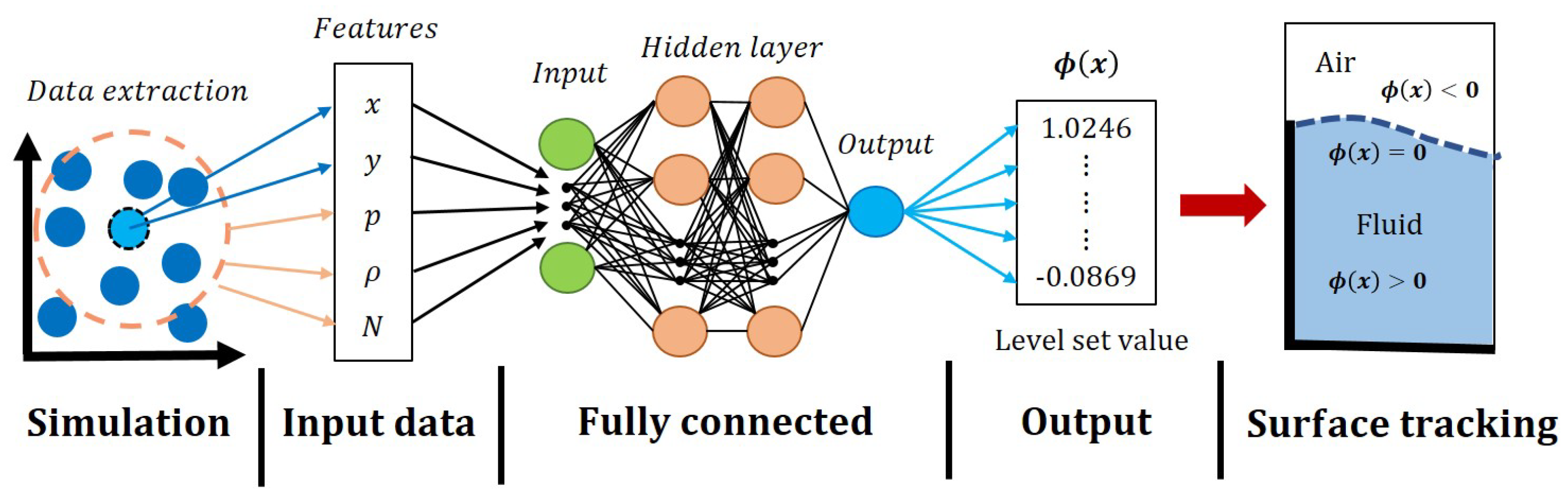
In this paper, we propose a learning model based on the physical properties of fluid particles obtained from SPH (Smoothed Particle Hydrodynamics)-based fluid simulations for tracking the surface of these particles. The proposed model reconstructs surfaces in real time with quality similar to ground truth in middleware environments. It learns physical properties such as position, density, the number of neighboring particles, and pressure used in SPH-based fluid simulations during preprocessing, thus avoiding additional resource consumption for surface tracking during runtime. Our method, by inferring level-set values used in surface tracking through the trained model, eliminates the level-set calculation process included in traditional methods, enabling real-time surface tracking of fluids in SPH-based simulations with fewer resources.
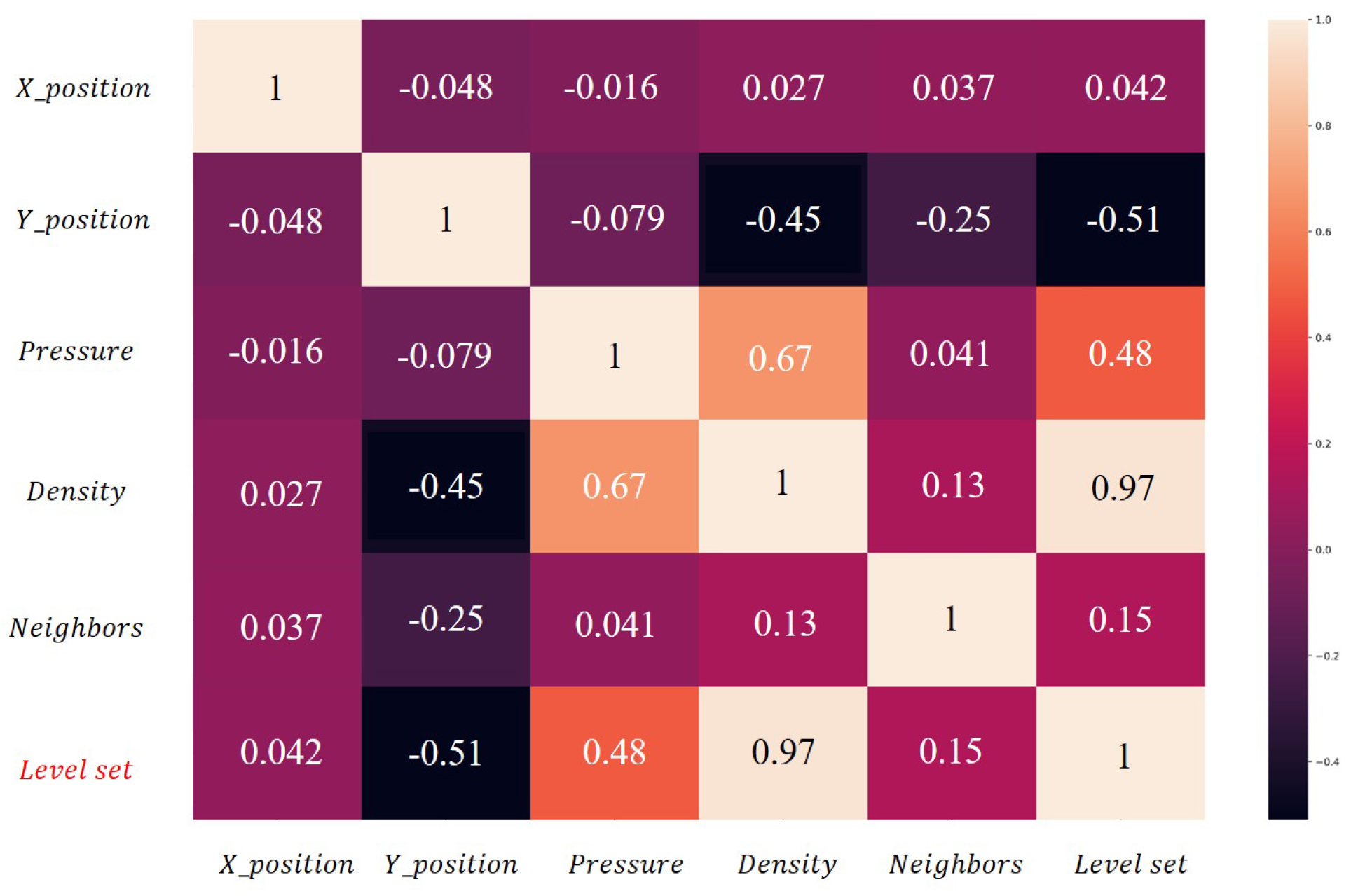
To explore if similar quality can be achieved with fewer resources and a simpler structure than our proposed method, we implemented linear regression and learning models. We also integrated an LSTM (Long Short-Term Memory) model into the surface tracking structure of SPH-based fluid simulations to see if learning and predicting time-dependent characteristics of fluid could improve surface tracking accuracy. To prevent unnecessary learning in our model, we used a heat map to extract correlations among features used in input, thus identifying feature trends for surface tracking predictions. We also examined the error changes after sequentially removing and retraining each input feature, to identify which ones most significantly influence learning.
To evaluate the generalizability of our proposed model, we conducted tests in five different scenes, excluding the scenes used for training. By eliminating the level-set calculation process included in traditional surface reconstruction techniques, we were able to track and reconstruct the surface of fluids in real time using fewer resources. Consequently, we visually confirmed that our method could reconstruct fluid isolines of similar quality to those found in existing research.
4. Experiments
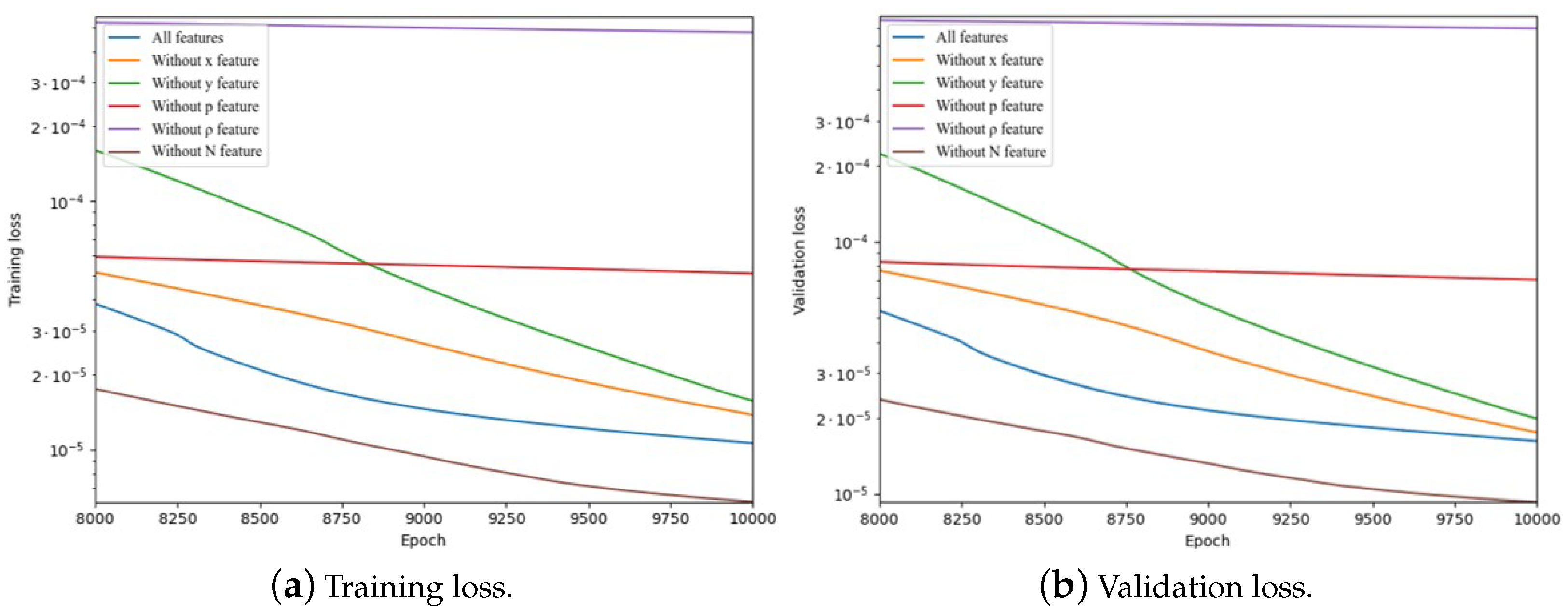
This section investigates the changes in loss when certain input values are excluded from the learning process.
Table 2 compares loss values by sequentially removing each feature used in training. The lowest loss occurred when
x, which had the lowest correlation with the level-set value, was removed from the input features. Although the model trained without
x showed the smallest loss, it was determined that the difference between validation loss and training loss was not significantly meaningful. Furthermore, it cannot be assured that excluding
x always results in the smallest loss across various scenes when calculating validation loss, so the paper opts to train the model using all features. The most significant change in loss occurred when density was removed from the input features. Based on these results, it was conjectured that density might be an essential element that must be included in learning for level-set inference. “None” in
Table 2 refers to the results when all features were used as training data.
During the model training process, the decrease in training loss is an important indicator for monitoring progress. However, to evaluate the model’s performance, it is necessary to examine its generalizability through the validation loss and check for overfitting issues. Through heat map analysis, the correlation between level-set values and input features was examined, and the theoretical influence on training was experimentally verified (see
Figure 3). Although the experiments were set for 100,000 epochs, the graph shows the range of 8000 to 10,000 epochs, making the visual differences quite apparent (see
Figure 5).
Table 2 presents the final loss values obtained by preventing an increase in loss through early stopping. Therefore, the loss values in
Table 2 can have different epoch numbers.
From the graph concerning validation and training loss, we can confirm that among all input features, density is the most critical factor for inferring fluid isolines (see purple line in
Figure 5). Density varies with the distribution of fluid particles, and to represent fluid isolines, it is essential to determine the interior/exterior of the fluid based on the level set. Density serves as a key metric for dividing these criteria, and consequently, during the training process, the loss for density was the greatest. Compared to other input features, the loss variation for density showed a significant difference, which is clearly illustrated in the chart (see
Figure 5).
Experimental Environment
The SPH fluid simulation environment was implemented using Python version 3.9.7, and for training, Pytorch version 1.11.0 and CUDA were utilized. The computer environment used was Windows 11, AMD CPU 5800X, NVIDIA GPU RTX 3080 with 12 GB VRAM, and 64 GB RAM.
The dataset comprised 5,672,400 particles (3912 frames × 1450 particles), with 70% used for training and 30% for validation. Four models were set as comparison groups: LR, LSTM, learning representation (1-layer), and our method, where LR is the linear regression model from Lazypredict.
The learning representation (1-layer) was trained with a learning rate of 0.0001, after 50,000 epochs, and applied early stopping at 100,000 epochs. The optimizer used was Adam, with the layer configuration being linear with 5 inputs, 32 in the hidden layer, and 1 output. The loss function used was MSE, and the activation function was LeakyReLU to include negative values in the learning process.
The LSTM was trained with a learning rate of 0.0001 and applied early stopping at 500 epochs. The optimizer used was Adam, with the layer configuration set to 6 inputs for LSTM, 1000 in the hidden layers, and a linear layer with 1000 inputs, with the output set to 1. The loss function used was MSE, and the number of input frames was set to 3.
The method proposed in this paper was trained with a learning rate of 0.0001, after 50,000 epochs, and applied early stopping at 100,000 epochs. The optimizer used was Adam, with the layer configuration being linear with 5 inputs, 64 and 32 in the hidden layers, and the output set to 1. The activation function was LeakyReLU, used to include negative values in the learning process. Dropout was not used in any of the models.
Experiments were conducted in a total of five scenes for the comparison of each model and to verify the performance of the proposed model. Information will be explained in detail in the following section.
5. Results and Analysis
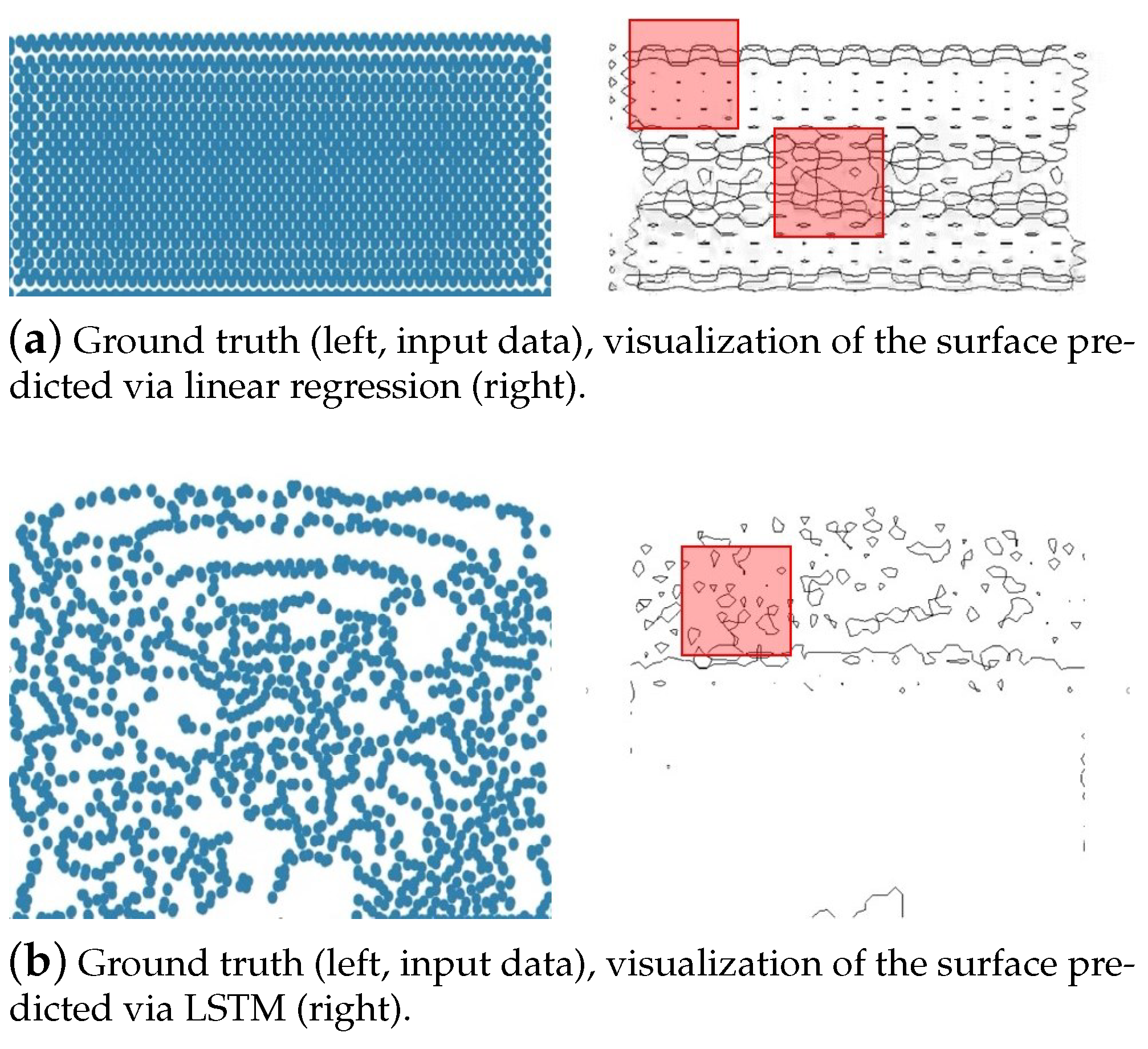
Figure 6 shows the visualization after reconstructing the surface based on the level-set inference results using linear regression and LSTM models.
Figure 6a illustrates that the surface reconstruction experienced artifacts due to the divergence of the level-set values predicted via linear regression. This divergence occurs because linear regression, typically used to learn linear structures of data, fails to learn the nonlinear data structure of the level set.
Figure 6a shows the first frame of the simulation, and in subsequent frames, the predicted level-set values diverge, resulting in an inaccurate representation of the fluid surfaces (see
Figure 6b).
Figure 6b shows the visualization of the surface reconstruction based on the inference results from the LSTM model. Similar to linear regression, the figure shows the divergence of the predicted level-set values using LSTM. Unlike linear regression, it is visually apparent that the level set of the initial frames can somewhat predict the surface compared to later frames. The structural characteristic of LSTM, which ensures temporal continuity by using the level-set values of previous frames as input, leads to the accumulation of errors in the predicted level-set values. This accumulation results in an increasing error as the simulation progresses, which can be visually confirmed.
Figure 7 shows a chart that calculates error values through RMSE for the level-set values inferred via the LSTM model for each frame. As previously mentioned, the error is small for the initial frames, but as the simulation progresses, the error values gradually increase, indicating a trend of growing discrepancies.
Figure 8a shows the results of surface reconstruction using level-set values inferred via the learning representation (1-layer) model. Contrary to other results depicted in
Figure 6, it can be visually confirmed that the surface has been somewhat tracked. However, there are artifacts where parts that should be connected are disjointed, or areas inside the fluid are incorrectly represented as the surface. Additionally, due to the lack of temporal continuity, flickering occurred when external forces not included in the training were applied during the simulation. The term “flickering” refers to the phenomenon where significant discrepancies in the reconstructed surfaces between consecutive frames lead to visually noticeable structural inconsistencies.
Figure 8b shows the surface reconstruction using level-set values inferred from the model proposed in this paper. Visually improved results can be seen compared to the learning representation (1-layer) model shown in
Figure 8a, but errors still exist in the surface reconstruction. It was also confirmed that the flickering phenomenon, which appeared in
Figure 8a, occurs in the proposed model as well.
This issue arises when the range of level-set values corresponding to the surface is lower than the allowed threshold. In traditional algorithms, surfaces above a certain threshold around a particle are directly represented during surface reconstruction. However, since the level-set values inferred from our method slightly differ from the ground truth, it is necessary to adjust the surface restoration using a threshold within an acceptable range. To address this issue, values had to be determined experimentally, and in this paper, 0.1 was added to the inferred
value. As a result, the problem was resolved, and issues where the interior of the fluid was mistakenly represented as the surface, as shown in
Figure 9, were corrected, allowing for the creation of smooth surfaces.
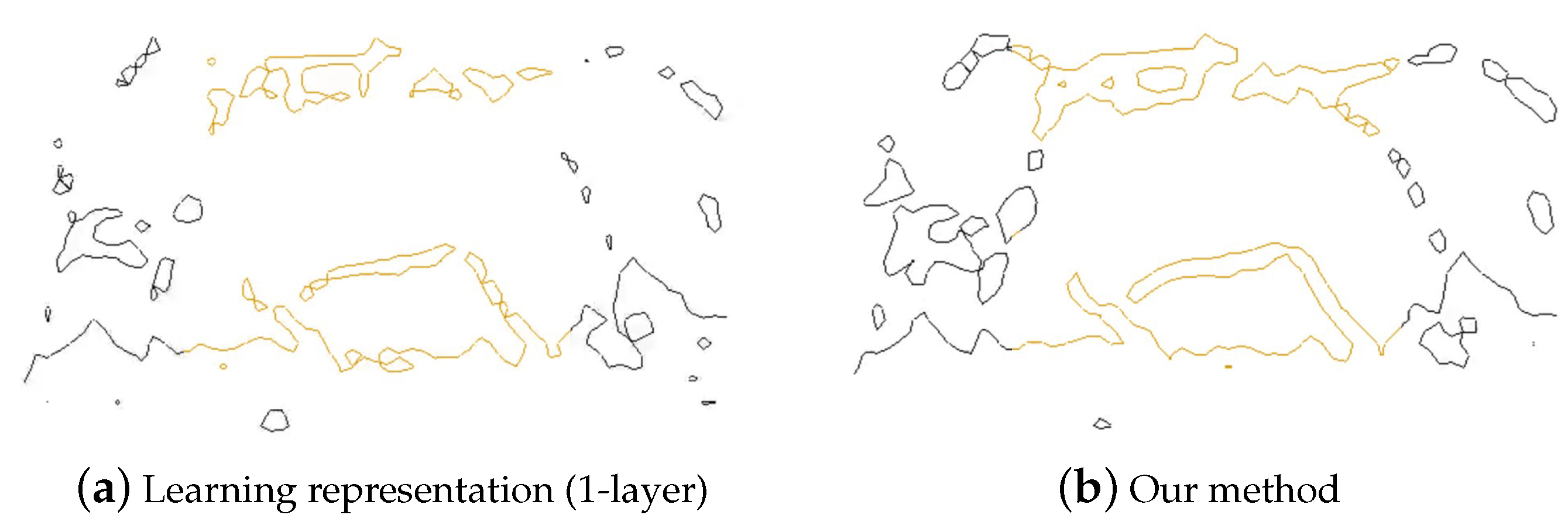
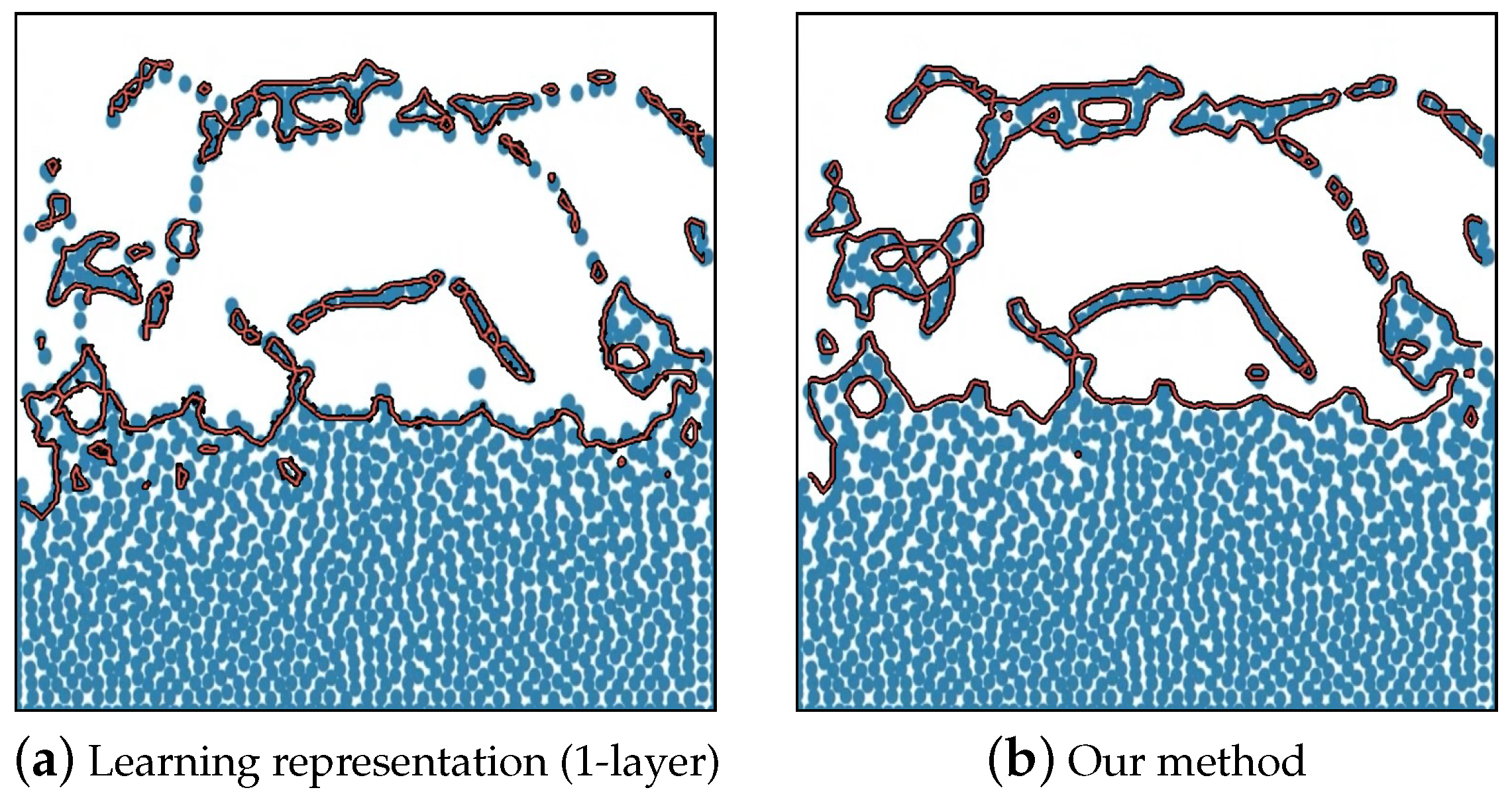
Figure 10 illustrates the differences in underestimation and overestimation of fluid isolines. In
Figure 10a, the surface inferred via the 1-layer model tends to predict the surface isoline above the actual particle positions when there is significant particle movement. Additionally, the surfaces represented inside the fluid are often inferred below the particle positions, or sometimes surfaces disappear despite the presence of particles (see
Figure 10a). On the other hand, the surface inferred via our method does not exhibit the problems seen with the 1-layer model’s inferred surface and accurately represents the fluid’s isolines.
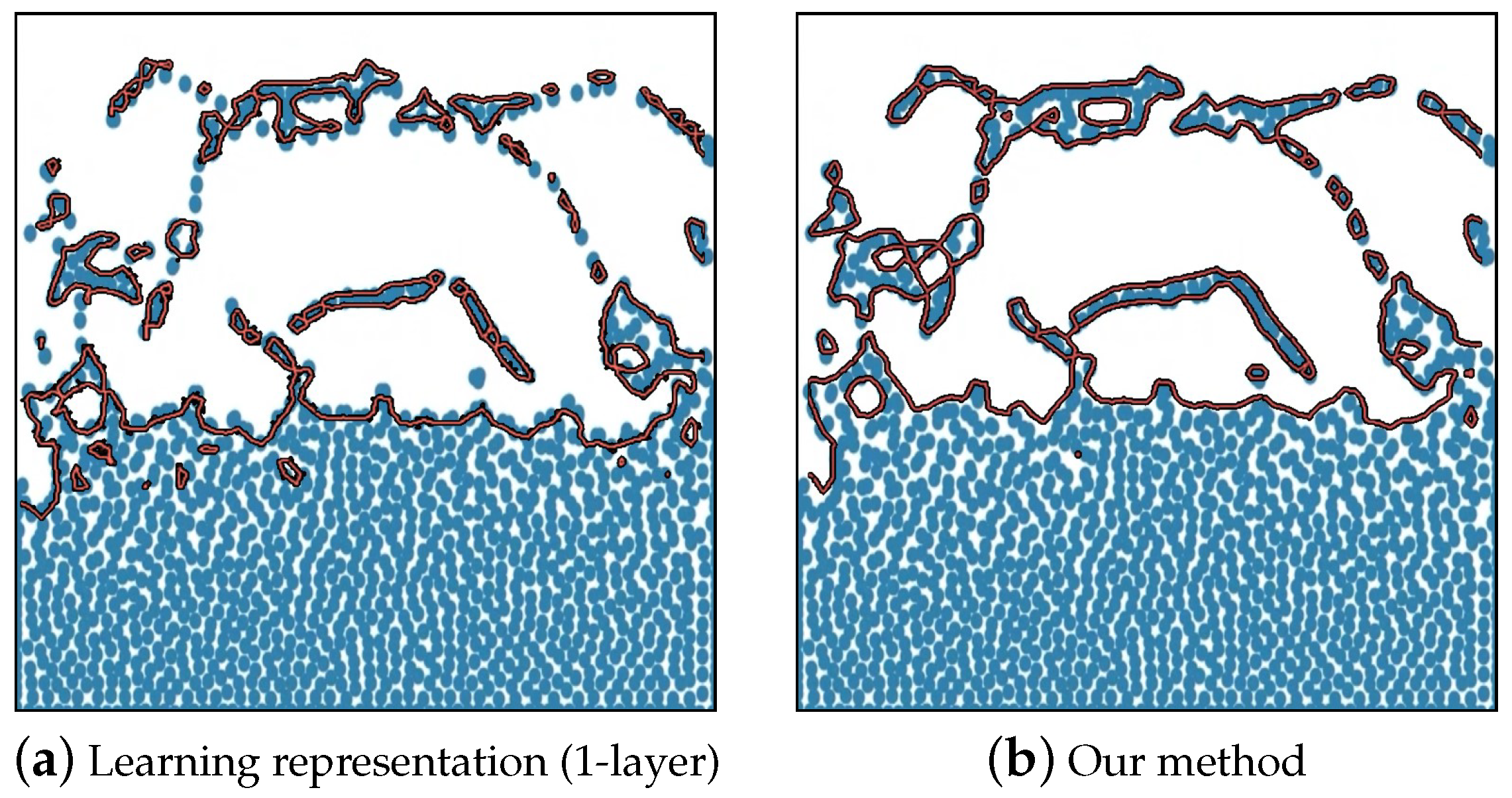
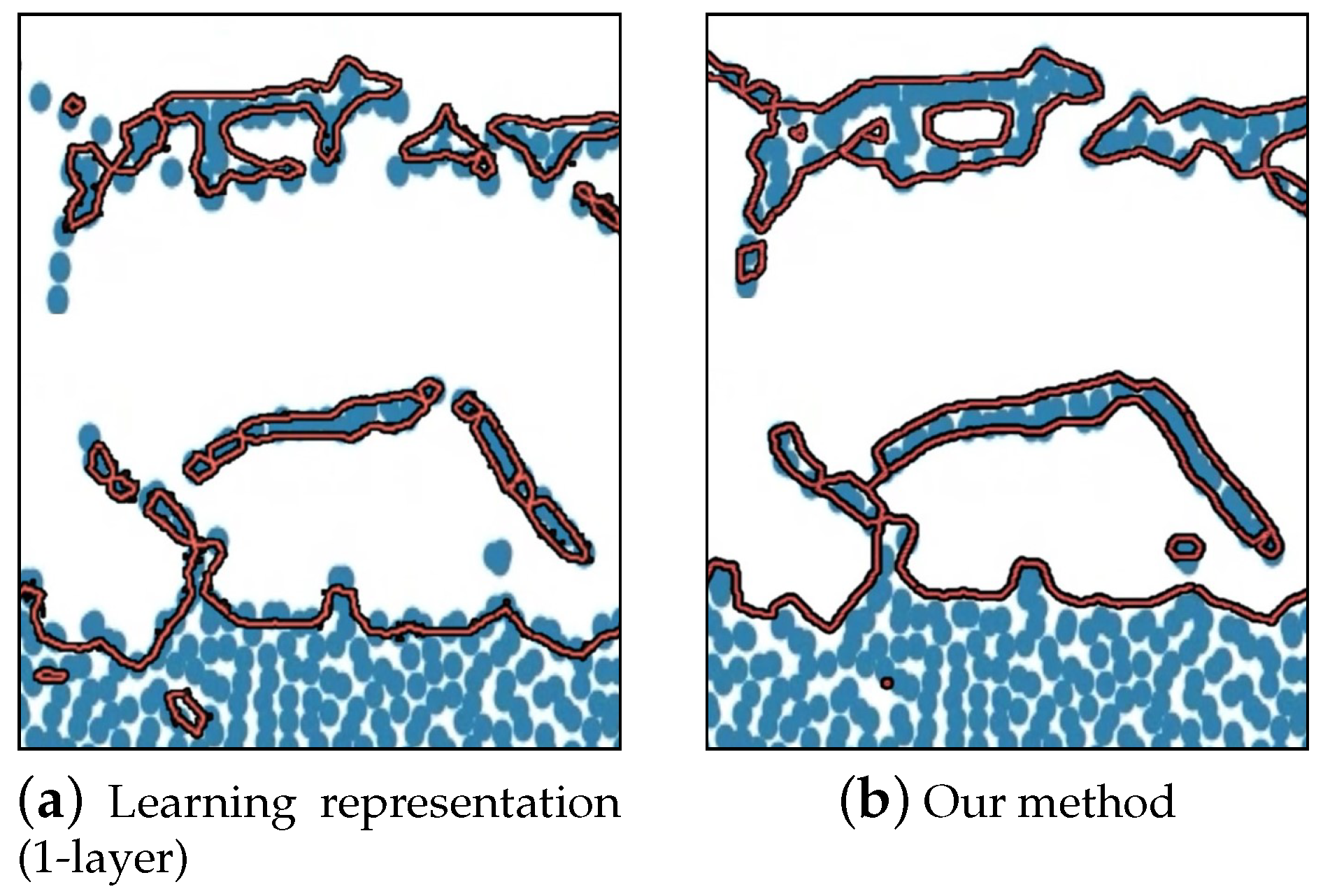
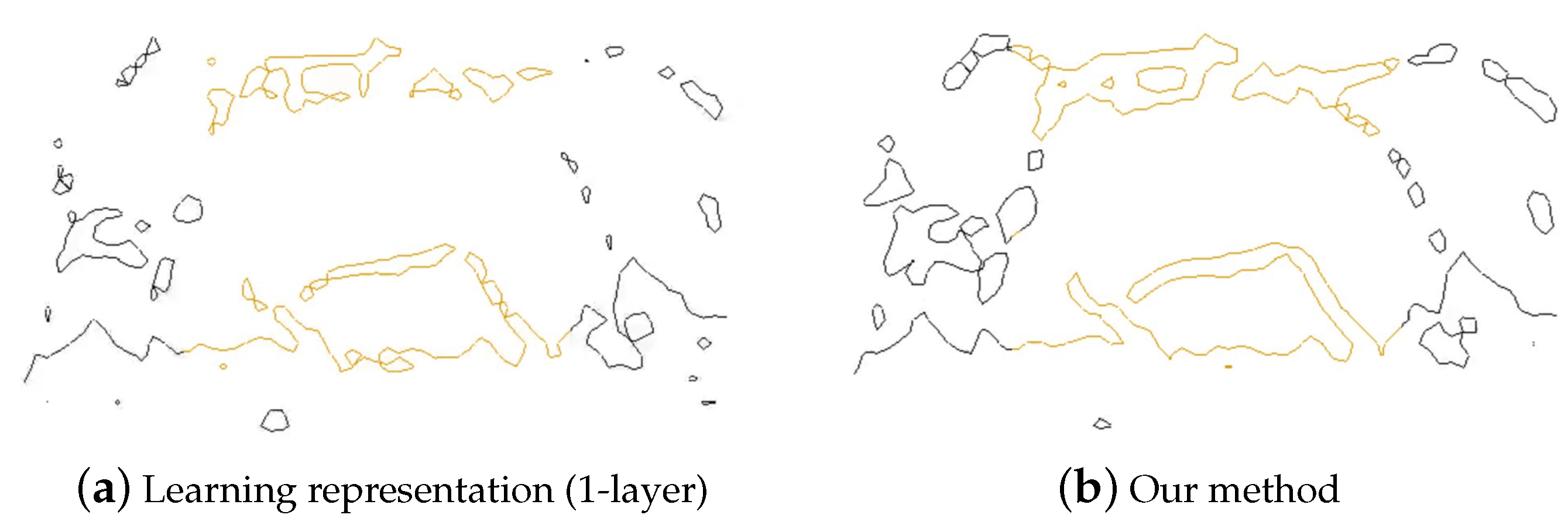
Figure 11 compares the surfaces inferred by the 1-layer model and our method. As seen in
Figure 11a, the surface inferred via the 1-layer model restores the surface as if it were disconnected despite the particles being connected, and even biases the position of that surface upwards. In contrast, the surface inferred using our method is accurately and stably reconstructed near where the particles exist, without bias in any direction. Similarly, in
Figure 11b, the 1-layer model restores the surface of connected particles as if they were disconnected, showing a result biased downwards. On the other hand, our method stably restores the surface at the particle positions.
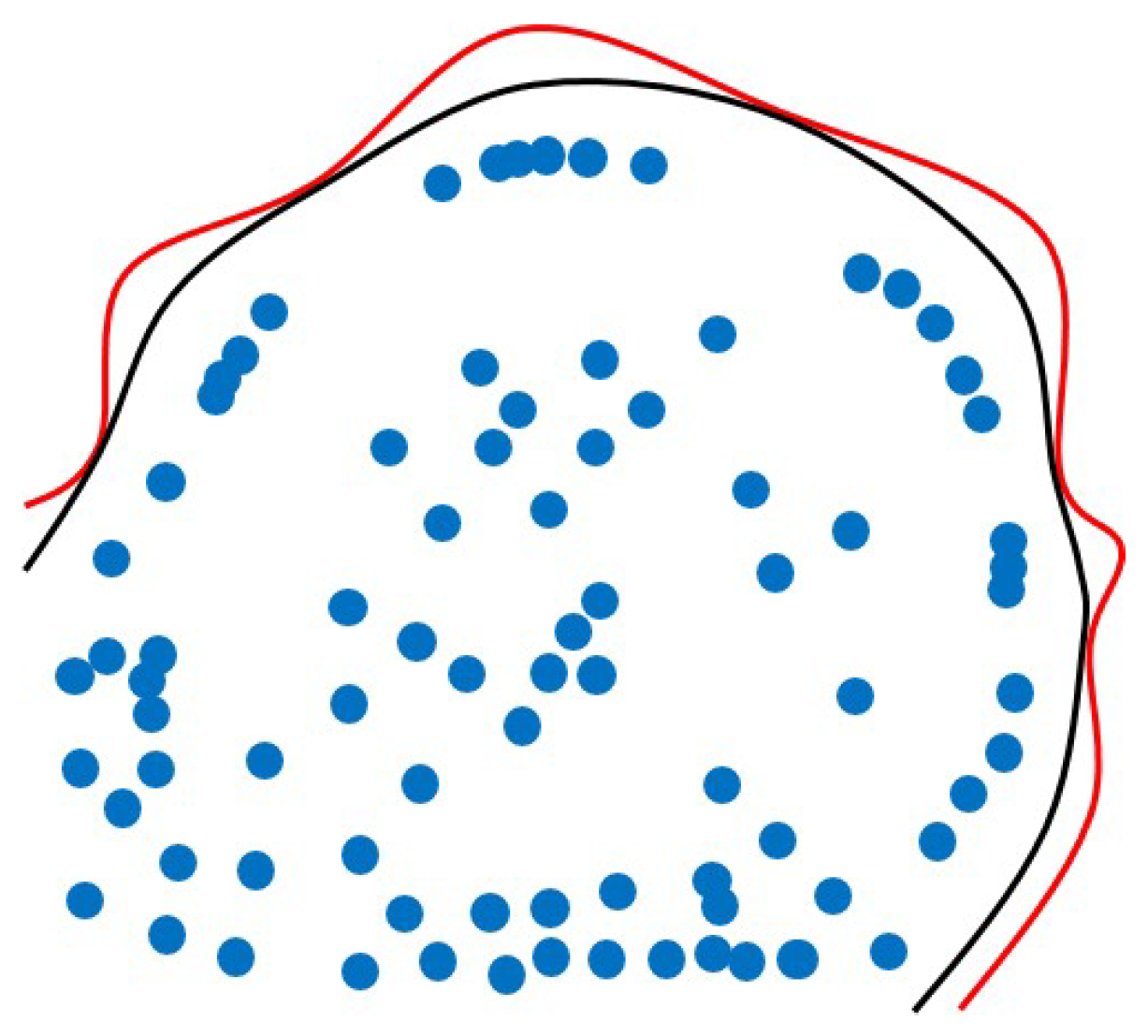
Figure 12 shows the results of extracting the isolines of fluid fluctuating due to mouse interaction on flat fluid surfaces. As depicted in the figure, there was not a significant difference in quality between the original surfaces and the isolines tracked via our method. The proposed approach is efficient as it represents isolines through learning without going through the explicit level-set calculation process, and it not only accurately represents flat water but also stably captures the shapes of bubbles exhibited in splashing effects.
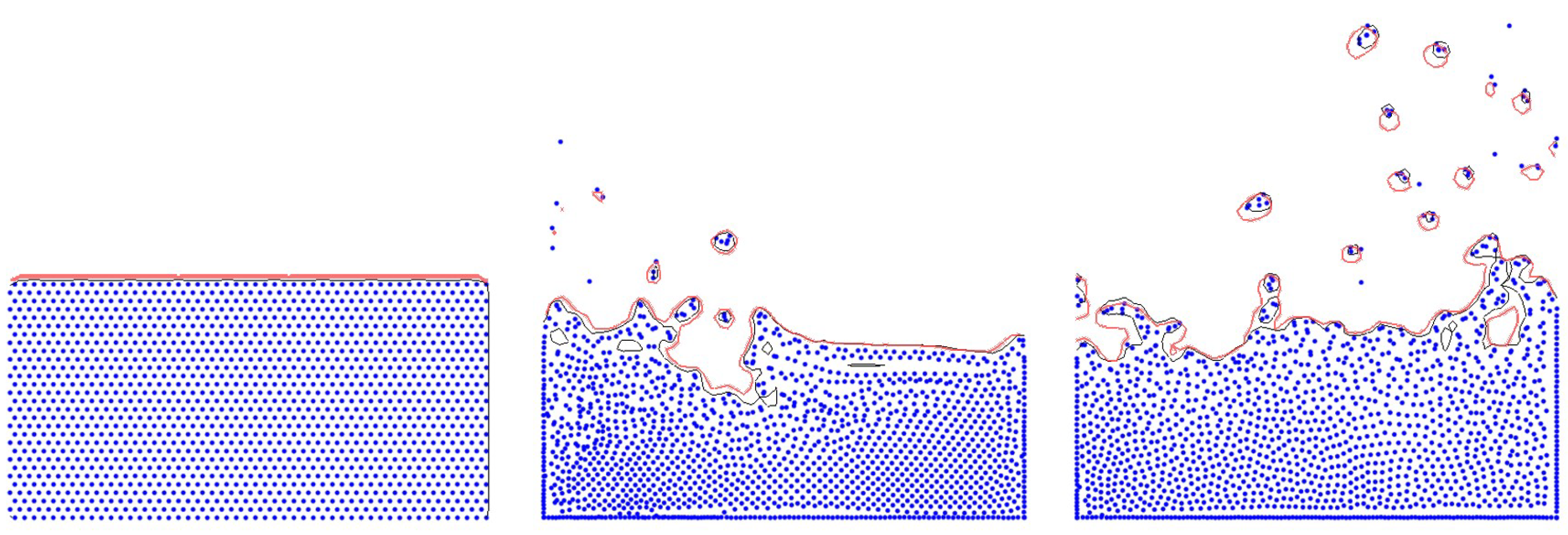
Figure 13 depicts a dam breaking scene, where the fluid’s isolines moving to the right due to the wave crest are well represented, showing no significant difference when compared with the original surfaces.
Figure 14 presents a falling water scene, where the isolines in the splash caused by the strong impact due to gravity are accurately captured without any omissions. While the learning representation (1-layer) produced somewhat noisy results with jagged surfaces, our method successfully represented the surfaces smoothly even in splash particles.
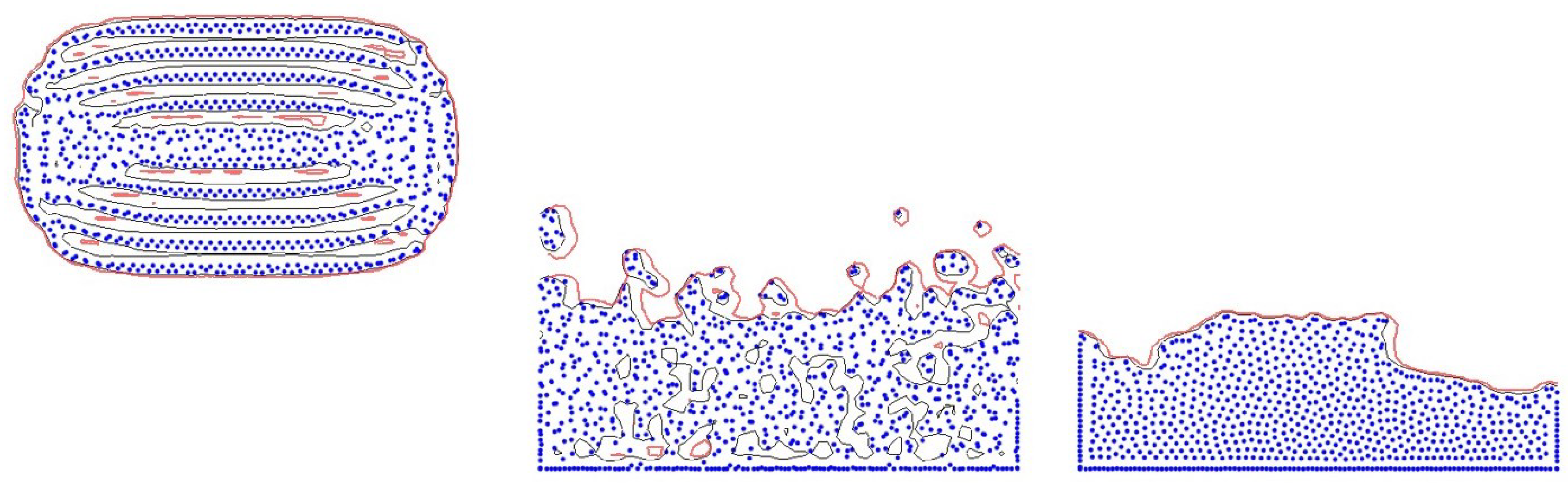
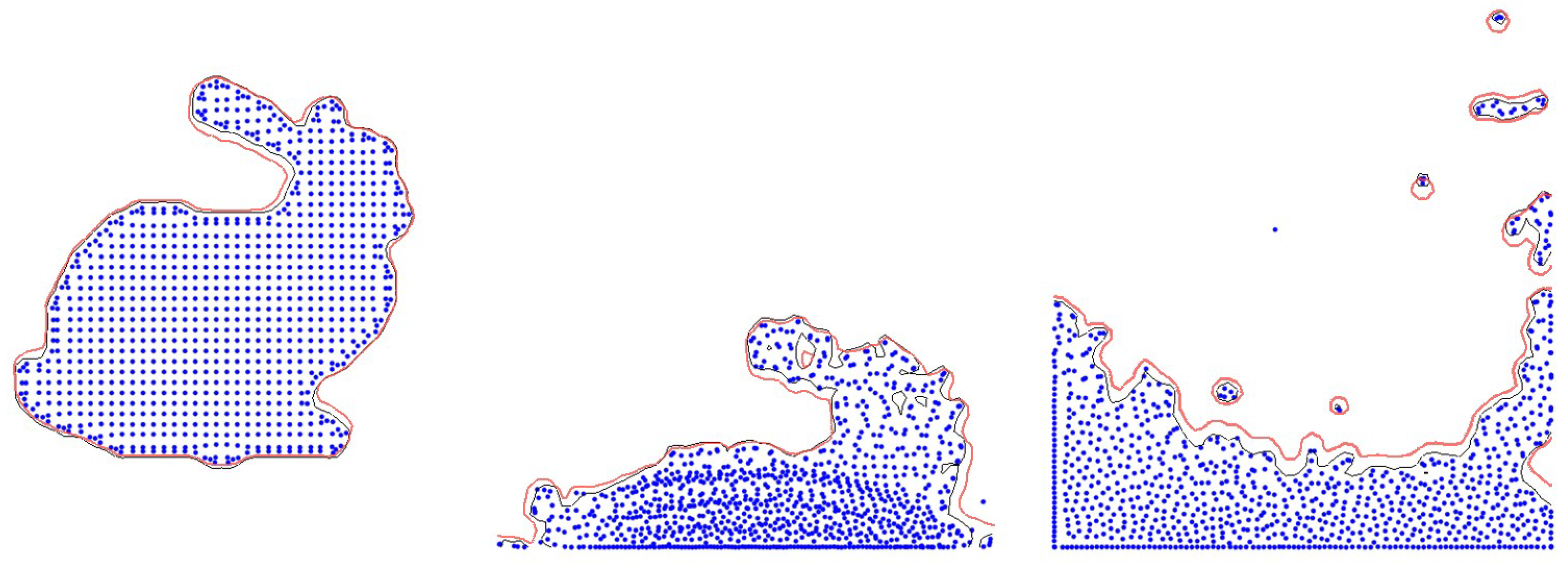
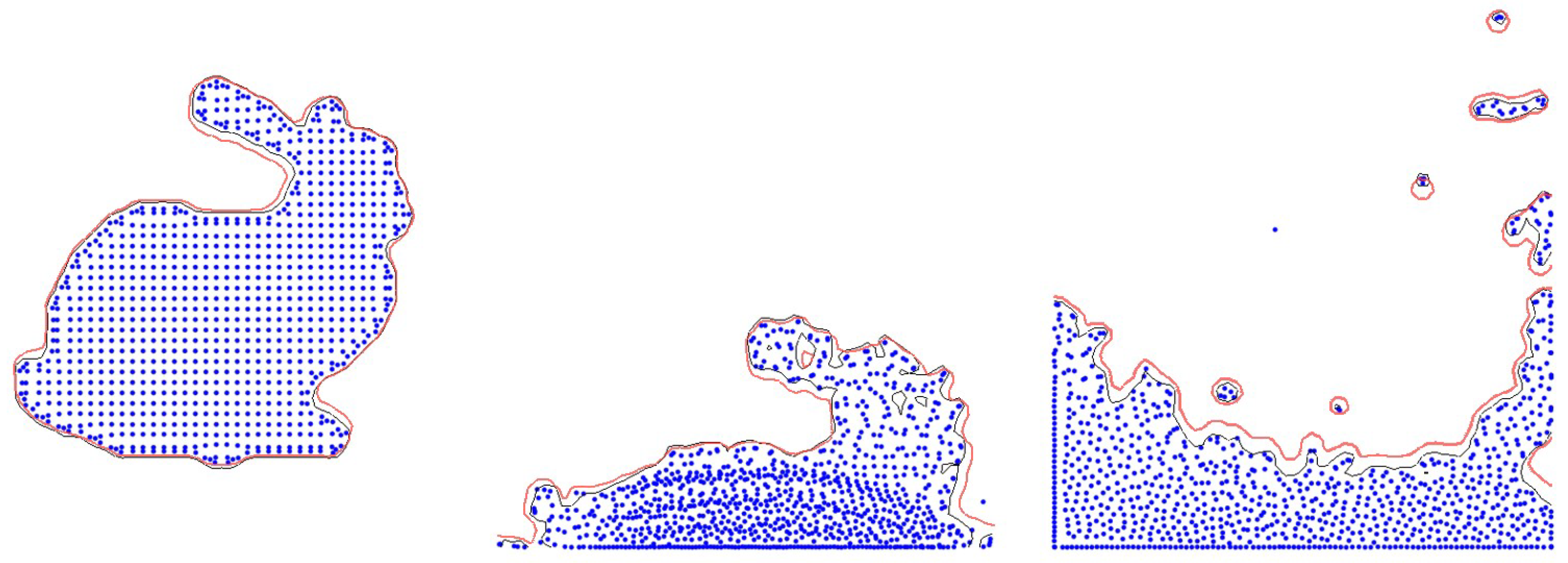
Figure 15 shows the results of tracking the isolines of fluid after dropping water particles in the shape of a bunny, to test on surfaces with more complex boundaries. Similar to previous results, it represented surfaces almost identical to the original surfaces and also stably represented the fluid’s isolines in scattering particles, like splashes. Lastly,
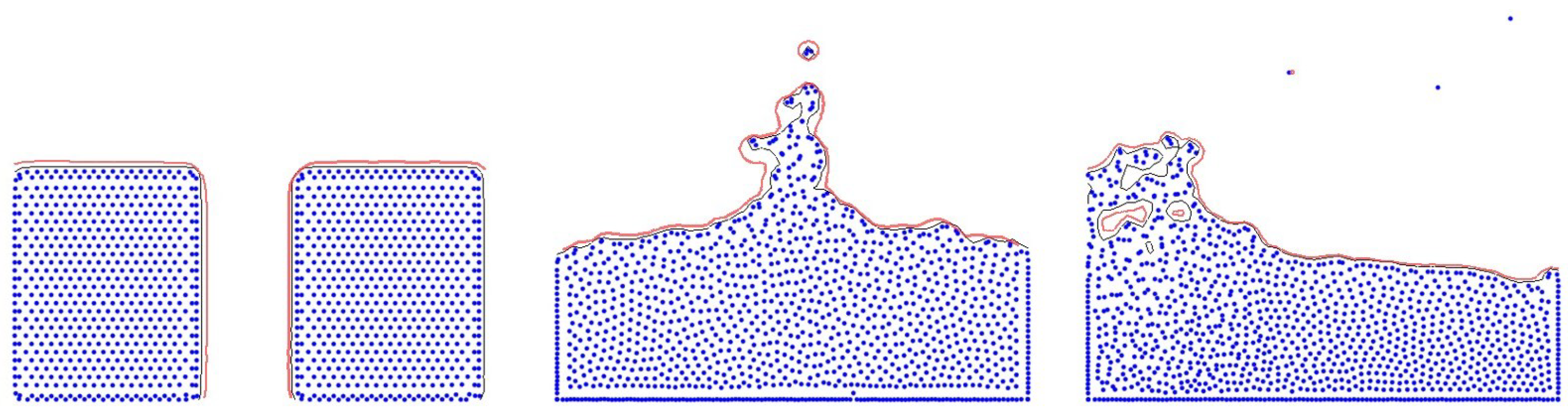
Figure 16 depicts a double dam breaking scene, where it accurately represented the fluid isolines in high splashes caused by the collision of two water columns and wave crests, consistent with the results shown earlier. This paper demonstrated the restoration of complex fluid surfaces across various scenarios through experiments, consistently learning the representation of fluid surfaces in all results, not limited to specific scenes.
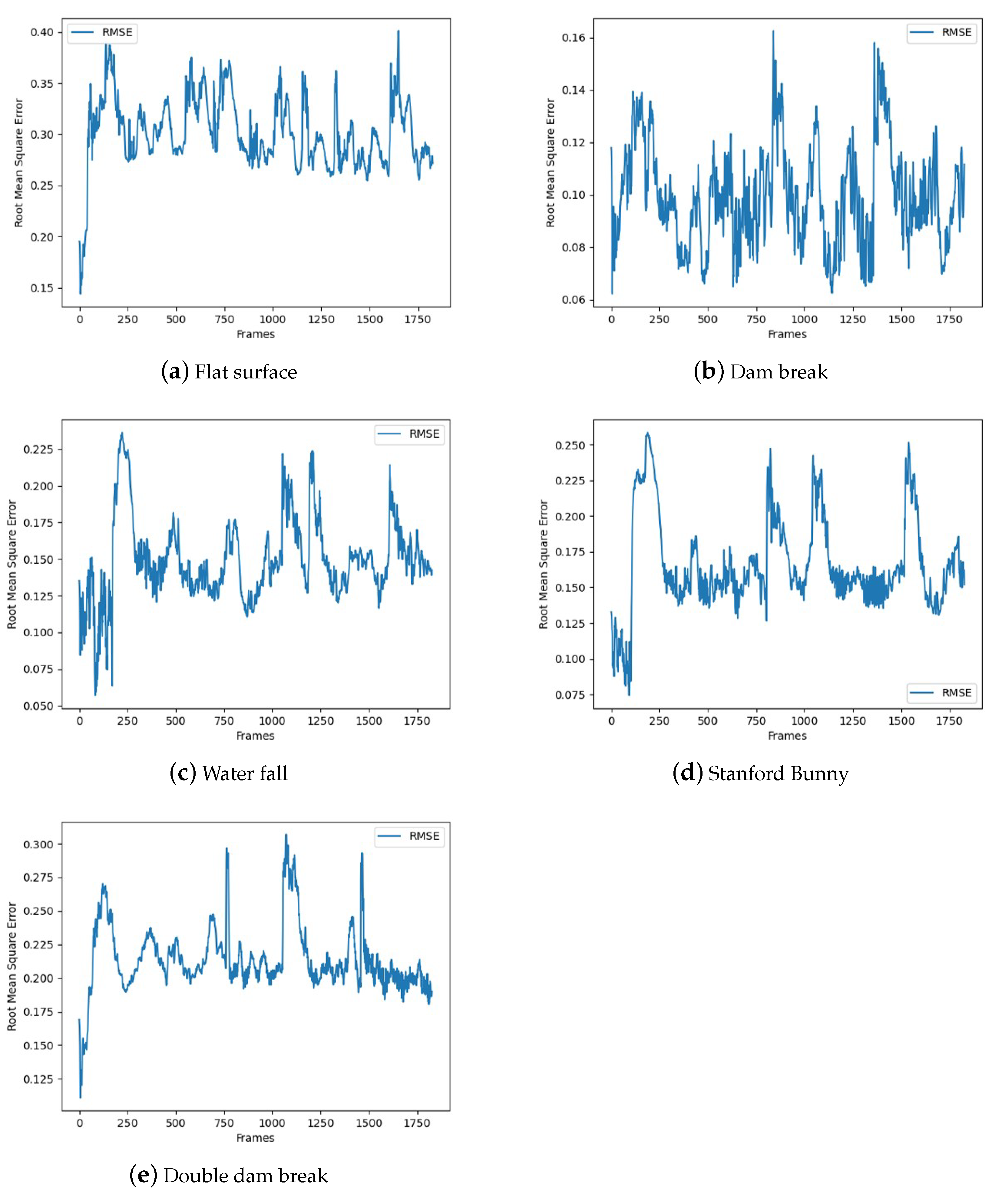
As indicated by the test results in
Figure 18, it was observed that values with high peaks in certain sections are generated due to the influence of gravity and external forces not included in the training data. The peaks that appear between 0 and 250 frames are caused by particles falling due to gravity and then moving in the opposite direction of their initial velocity due to the rebound effect when colliding with boundaries or other particles. The remaining peaks appeared when the user dragged with the mouse, demonstrating that the method can stably track the fluid isoline even when user interaction occurs.
Figure 17 shows the result of the user interfering in the fluid simulation using mouse interaction. In this scene, our method also stably tracked the surface without any flickering or missing surfaces.
In particle-based simulations, a level-set function is typically required to extract surfaces or isolines. Due to the absence of connectivity information inherent in conventional meshes, accessing neighboring particles is necessary to calculate the level set of a target particle, requiring about 15∼20 neighbor particles for stable surface computation. As the total number of simulation particles increases, so does the computational load for this process. Acceleration data structures such as hash tables, K-d trees, and quadtrees are needed to solve the Nearest Neighbor Particle (NNP) problem. Moreover, kernel-based various operators are required to compute the level set from neighbor particles, making the extraction of fluid surfaces from scenes with many particles a computationally intensive task. The method proposed in this paper eliminates the need for acceleration data structures and the process of calculating level set, relying solely on the testing phase with weights learned through neural networks. This approach demands fewer resources and guarantees real-time performance in representing fluid isolines. So it can be efficiently utilized in resource-constrained environments like middleware and devices based on Android/iOS.
6. Conclusions and Future Research
In this paper, we proposed a learning model designed to track the isolines of a 2D fluid based on its physical properties as inputs. Compared models such as linear regression and LSTM resulted in unnatural surfaces due to the divergence of inferred level-set values. While the surface represented by the learning representation (1-layer) model was visually significant, it was not as smooth as the surface produced by the proposed model. The LSTM model, designed to ensure temporal continuity between consecutive frames, suffered from the structural characteristic of LSTM, where previous errors continuously accumulate, leading to divergence in later frames. Experiments with linear regression and learning representation (1-layer) models were conducted to see if they could reflect the data trained with a simpler structure compared to our method, but they were less accurate than the proposed model. Training with networks having a more complex structure (3-layer, Hidden layer 256, 128, 64, etc.) than our method was also attempted, but it resulted in increased training and validation loss without convergence. To verify the generality of our method, tests were conducted in a total of five scenes, and in all test scenes, visually natural fluid isolines were successfully represented.
The model proposed in this paper is independent of time, thus preventing the accumulation of errors in the level set, enabling surface reconstruction with uniform quality. Additionally, by eliminating the computational process of traditional algorithms, it saves time and resources, making it suitable for real-time isoline tracking and use in middleware.
In the future, we plan to reduce training time and improve the accuracy of the model through correlation analysis with physical properties in anisotropic forms, in addition to the input features used in this paper. Furthermore, we plan to extend our research to efficiently learn level-set inference and surface tension using models such as GNN and CNN, which were not utilized in this paper.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}