
Misalignment and Rub-Impact Coupling Dynamics of Power Turbine Rotor with Offset Disk

Abstract
1. Introduction
2. Misalignment and Rub-Impact Coupling Dynamic Modeling
2.1. Misalignment Model
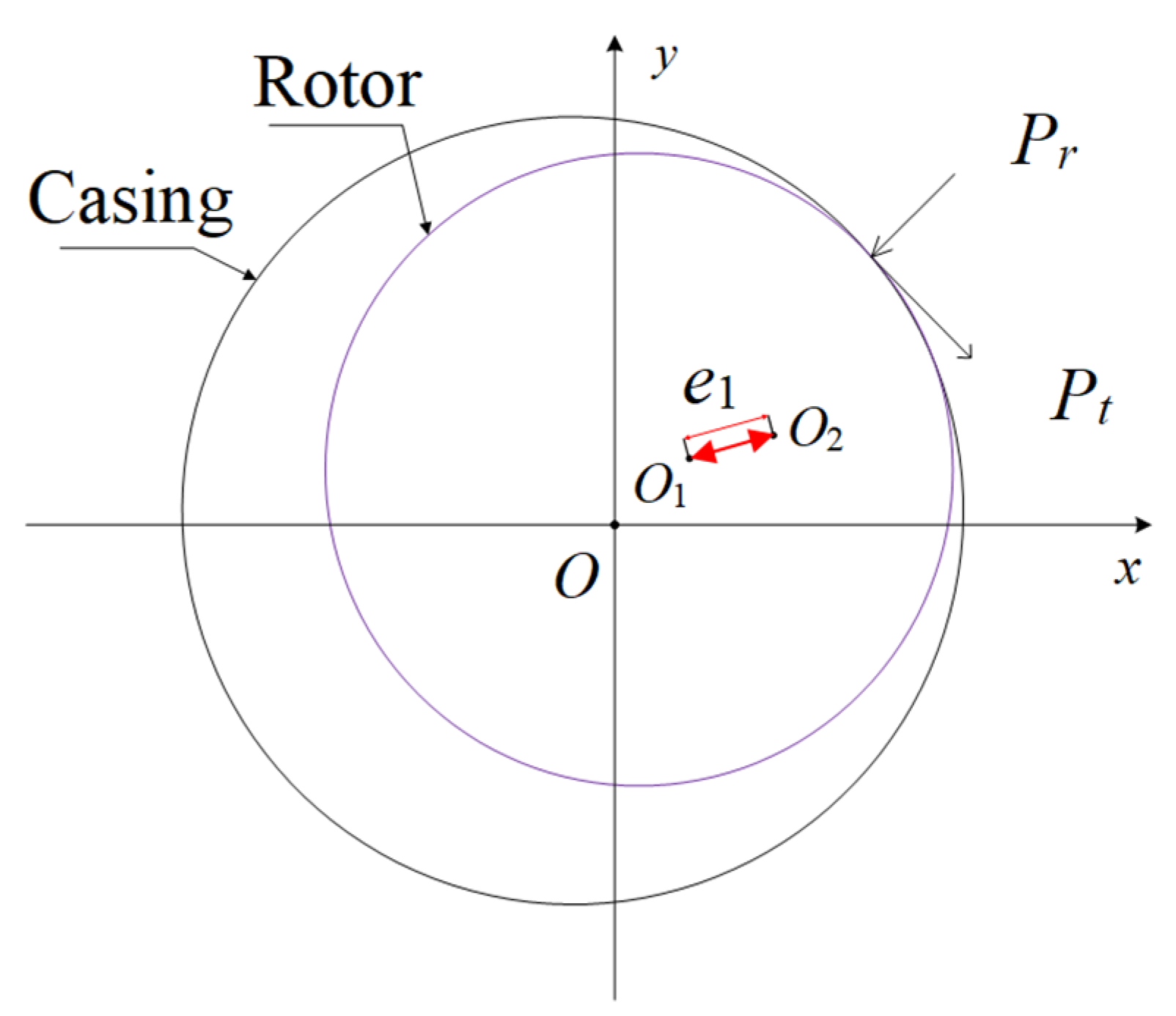
2.2. Rub-Impact Model
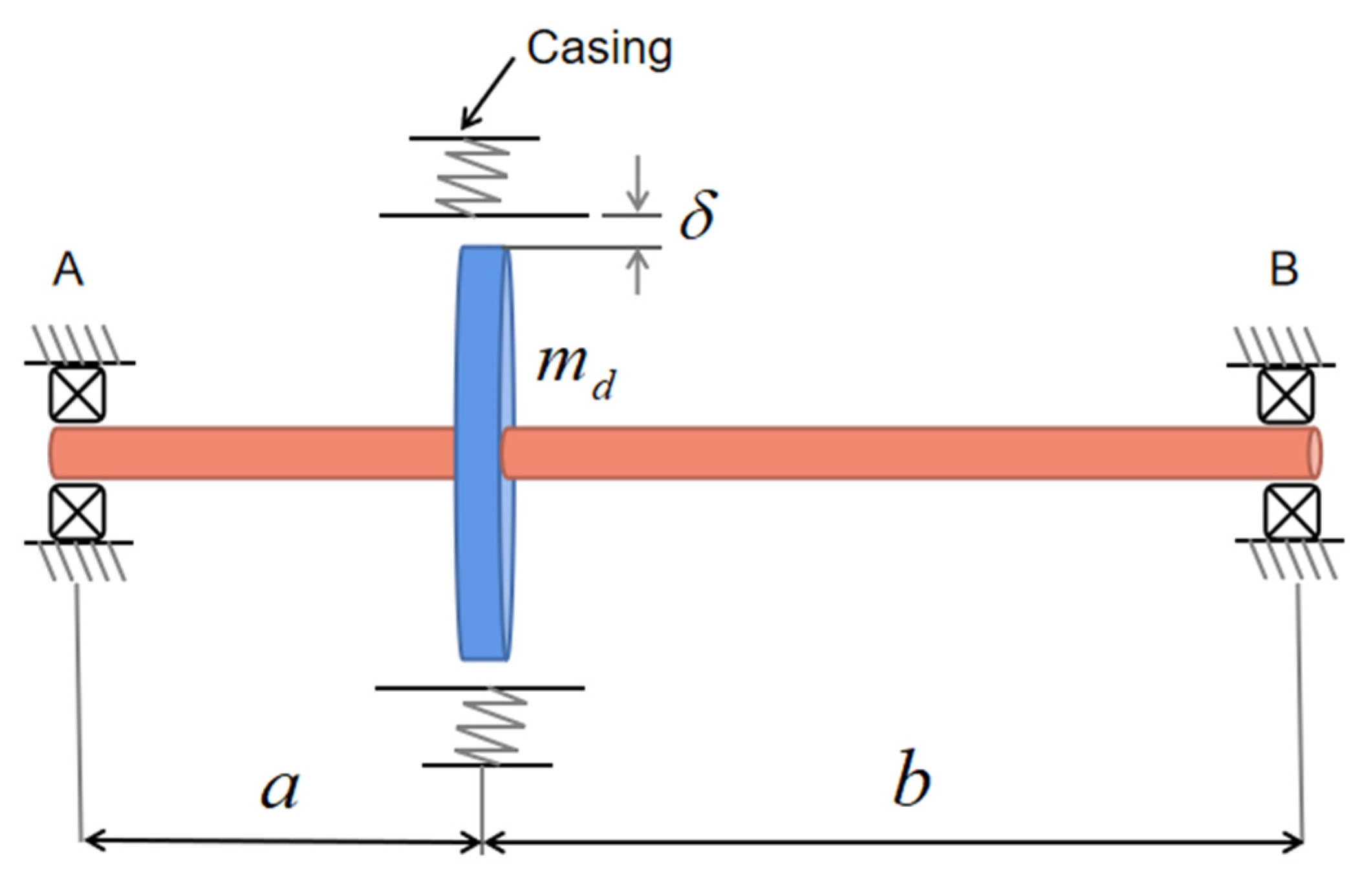
2.3. Dynamic Model of the Rotor System
3. Results and Analyses
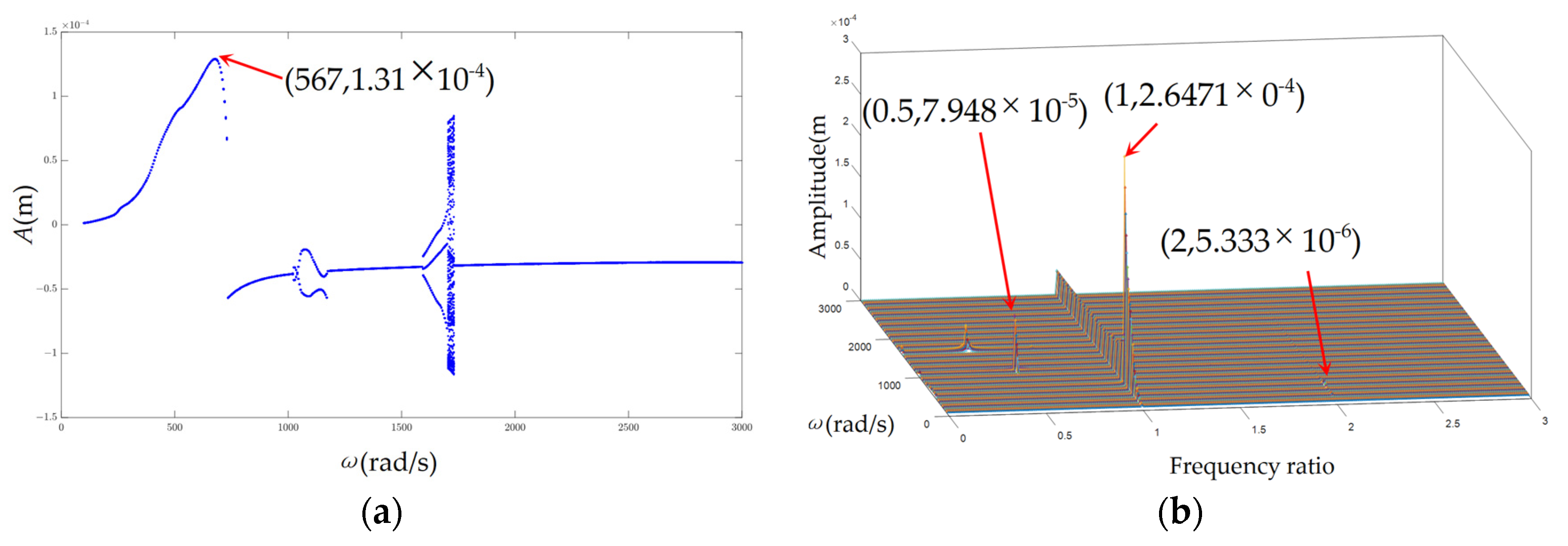
3.1. Rotating Speed
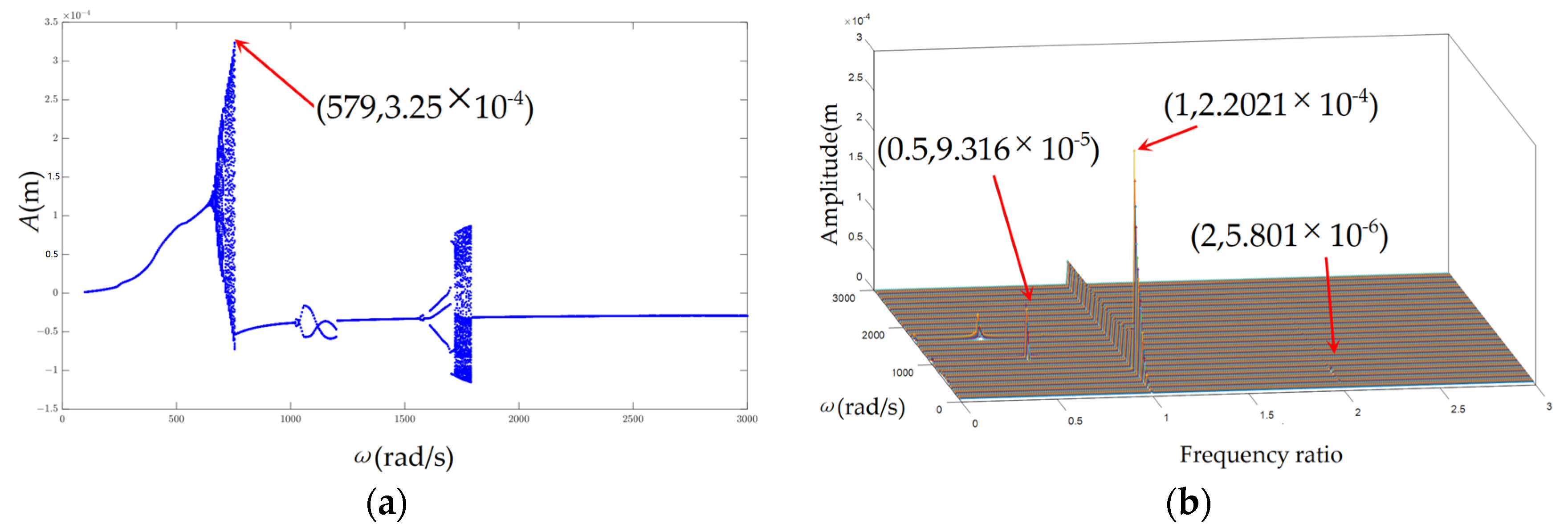
3.2. Misalignment Angle
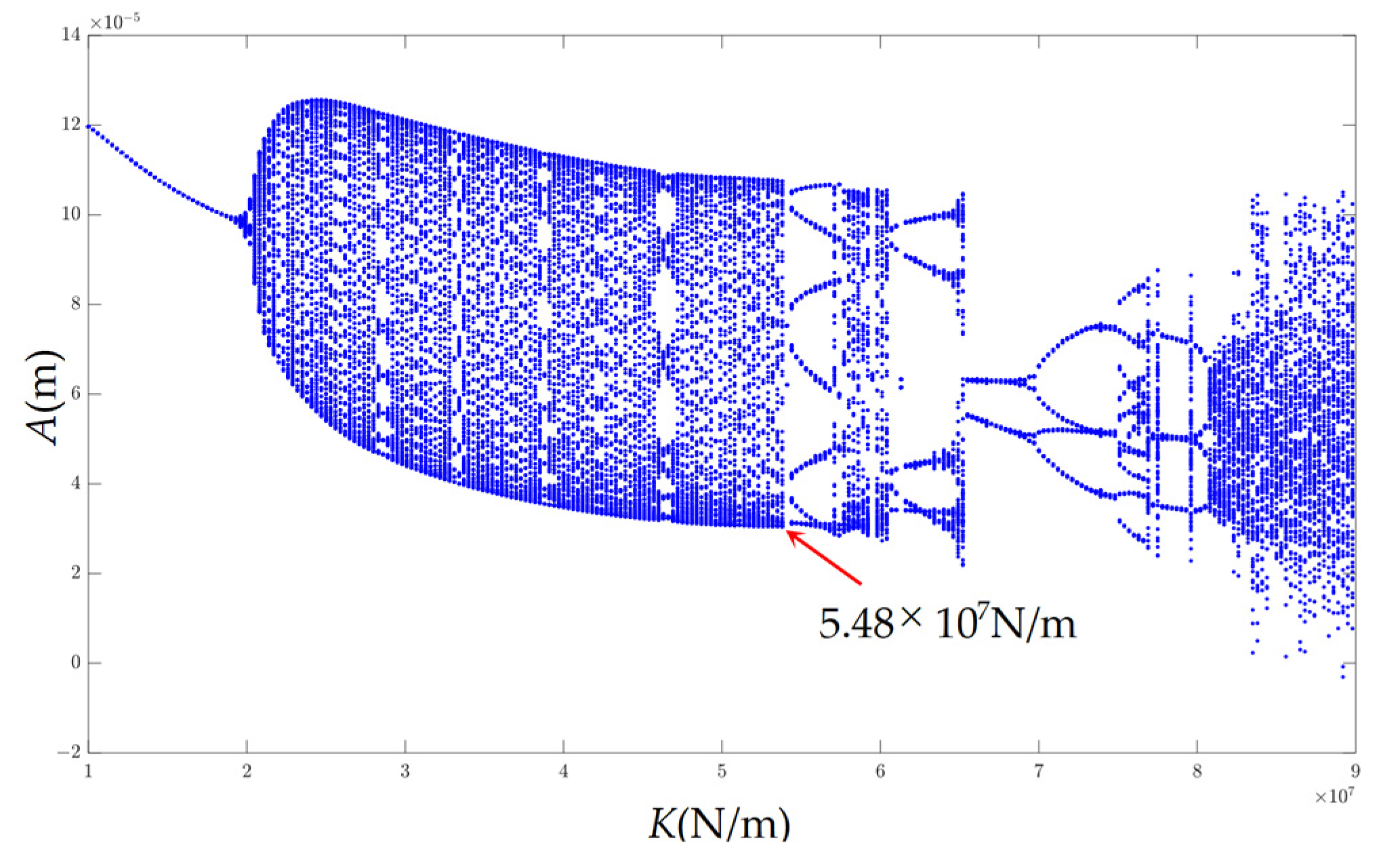
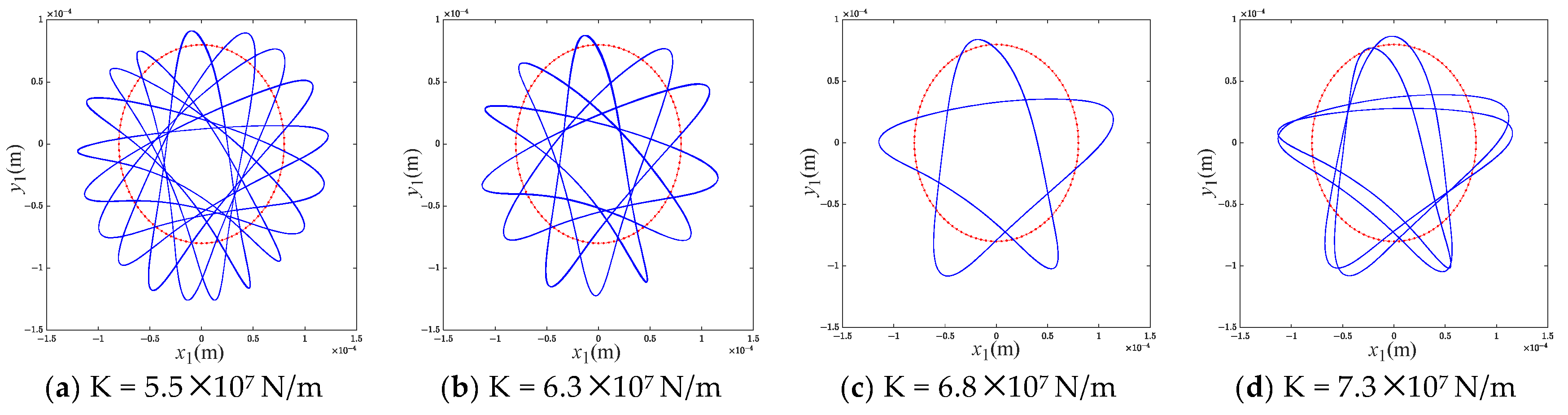
3.3. Stiffness of Rub-Impact
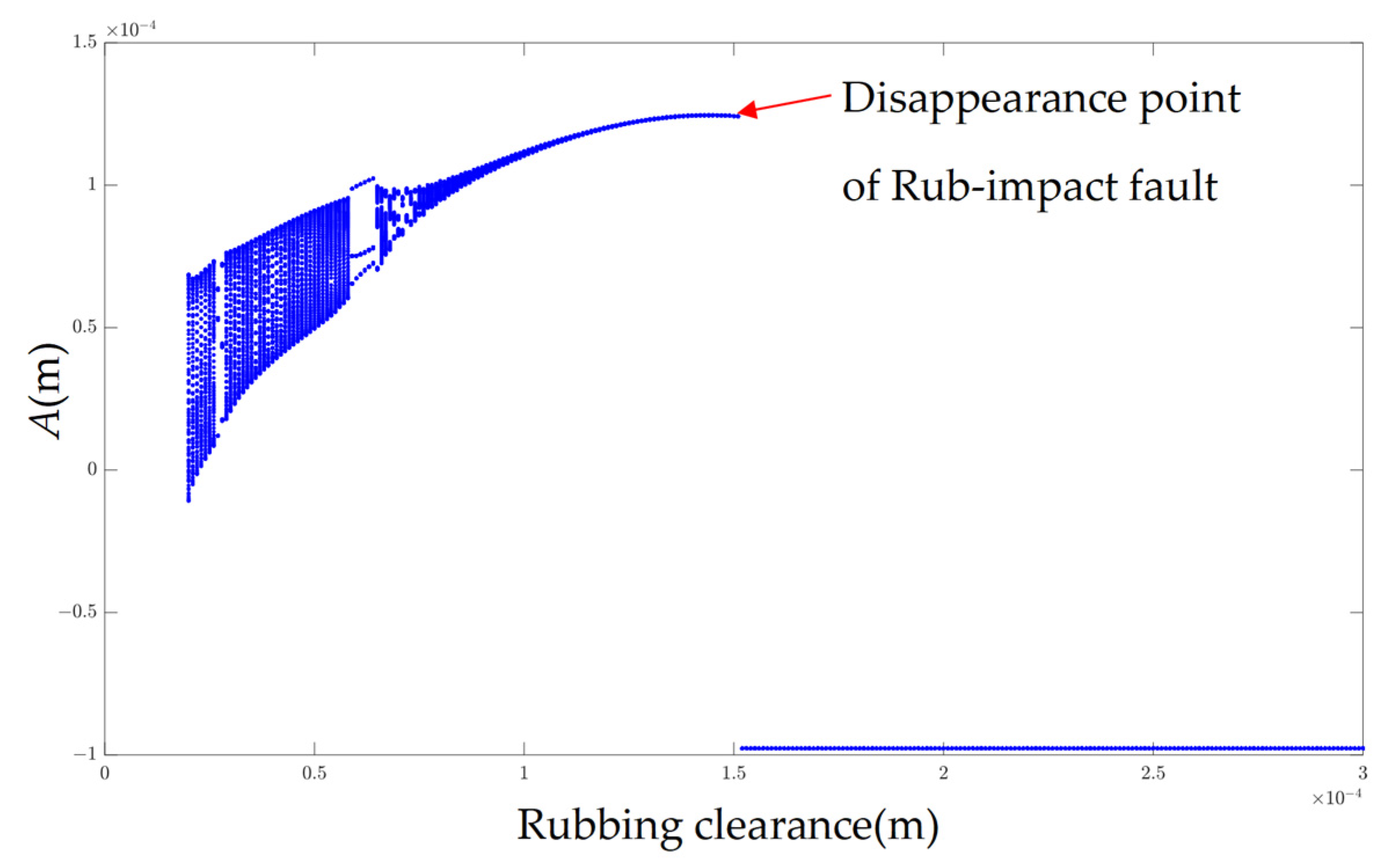
3.4. Clearance
4. Verification of the Theoretical Modeling Method
5. Conclusions
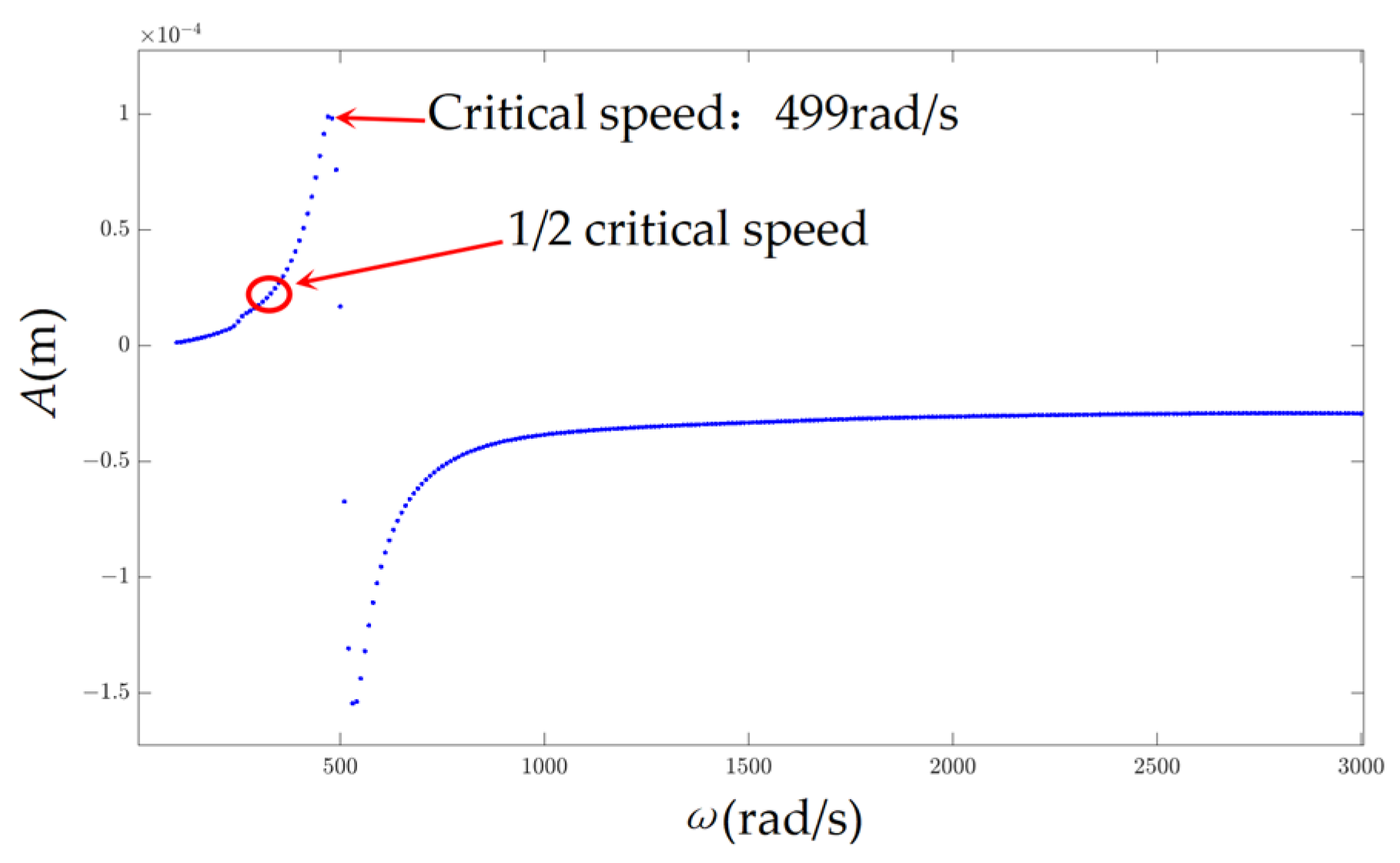
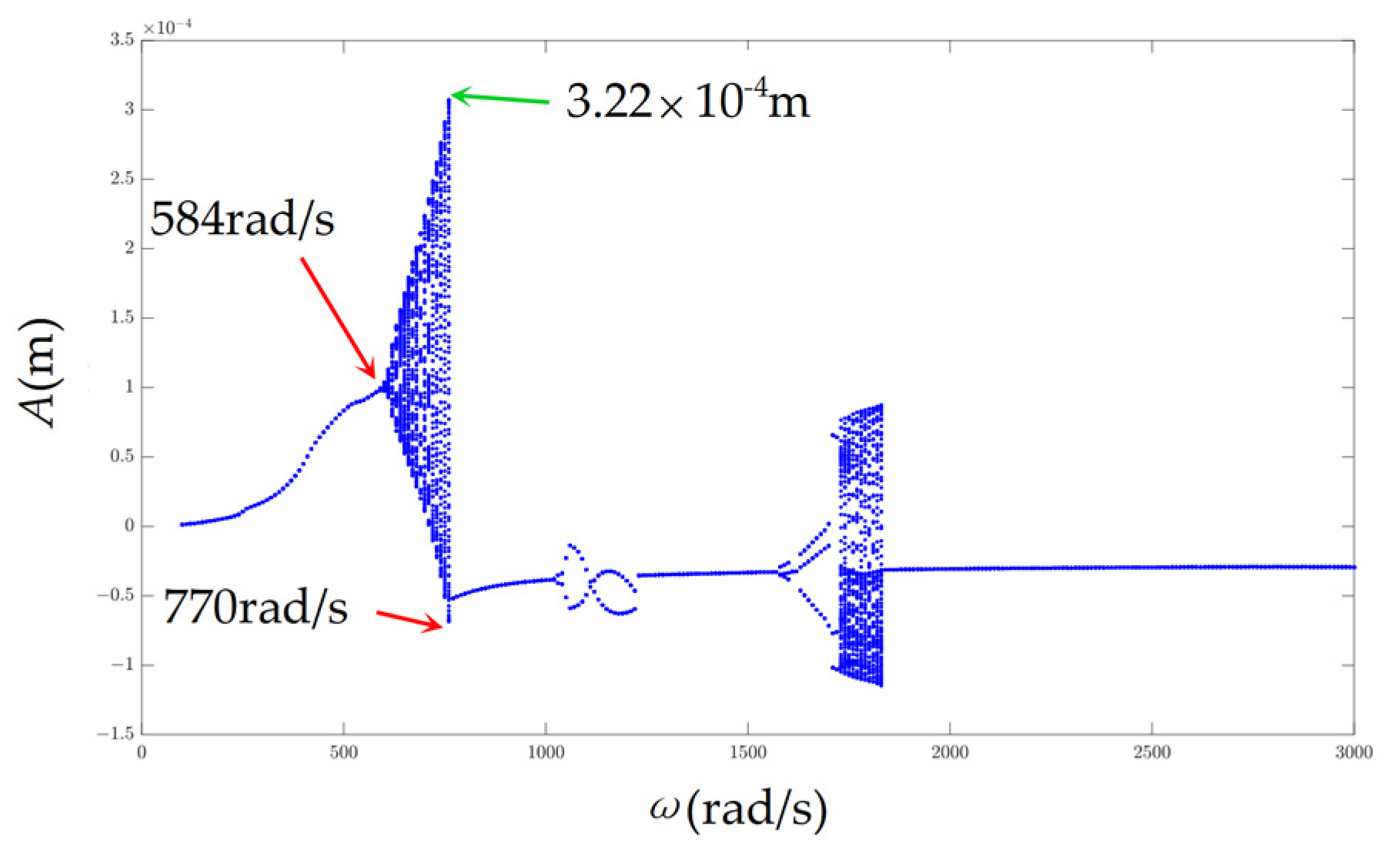
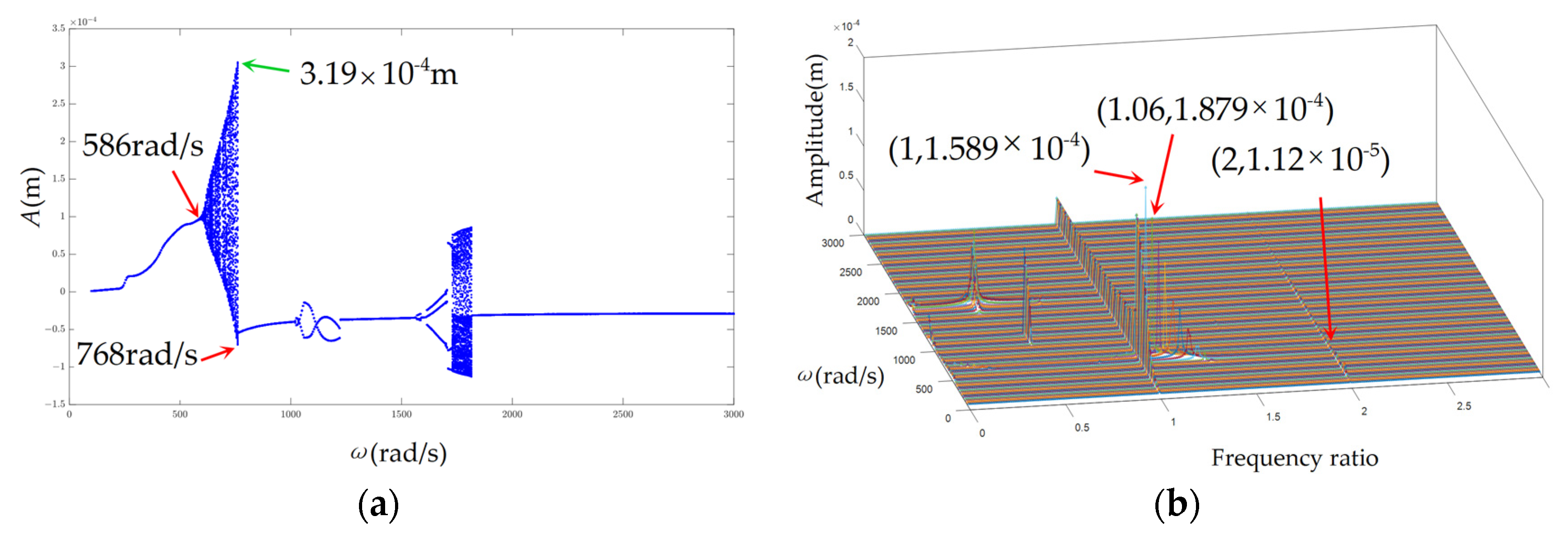
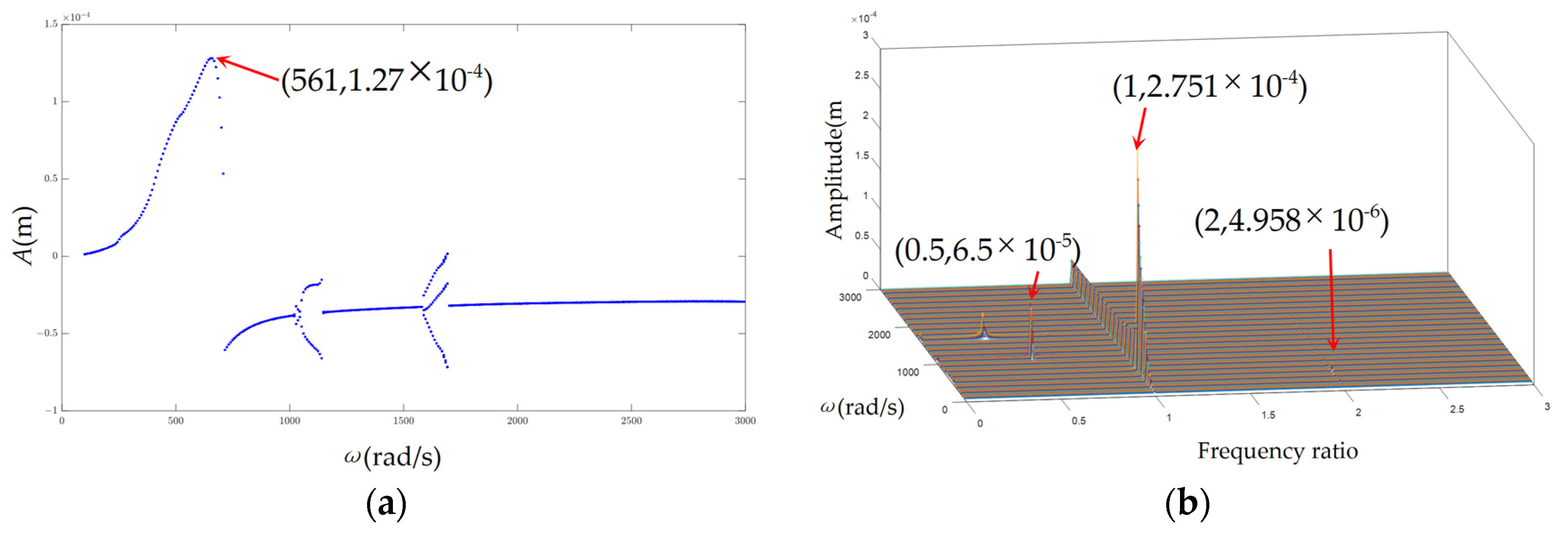
- The existence of the rub-impact increases the stiffness of the system, thereby increasing the critical speed. Compared with the system of the misalignment fault, the critical speed of the coupling fault system increases by 54%, and Hopf bifurcation occurs in the system.
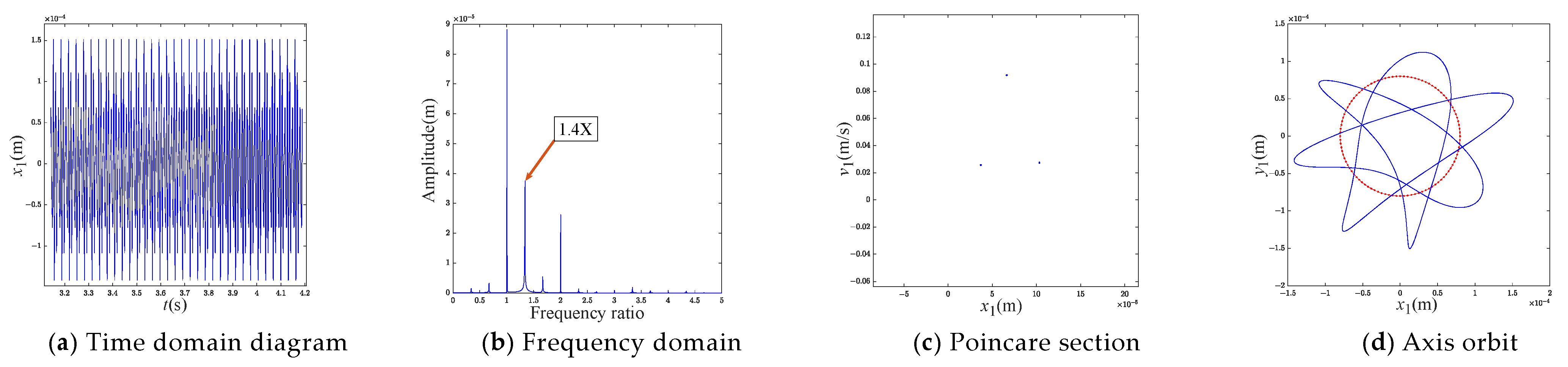
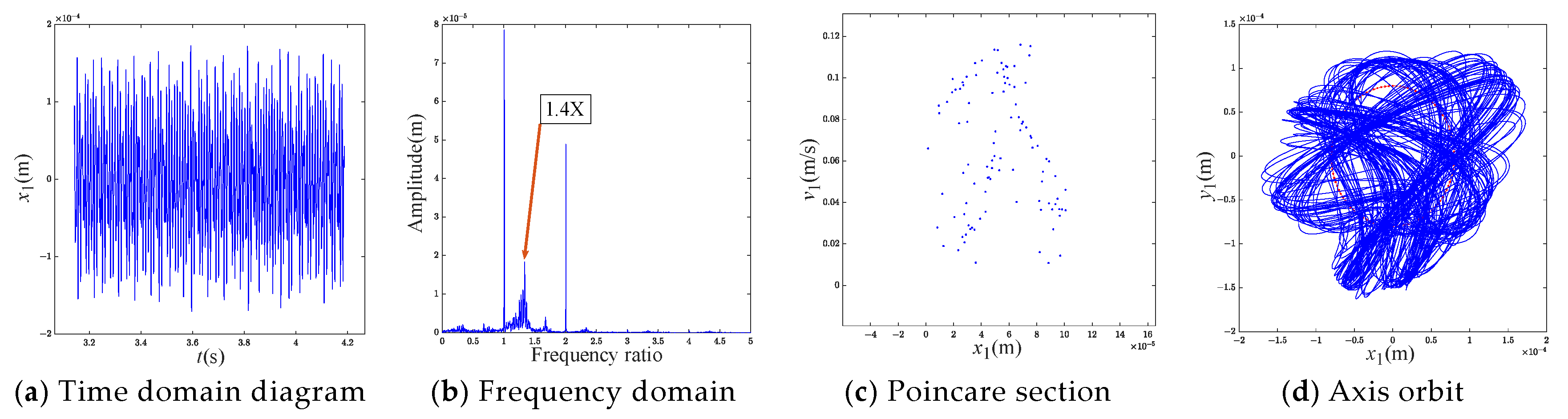
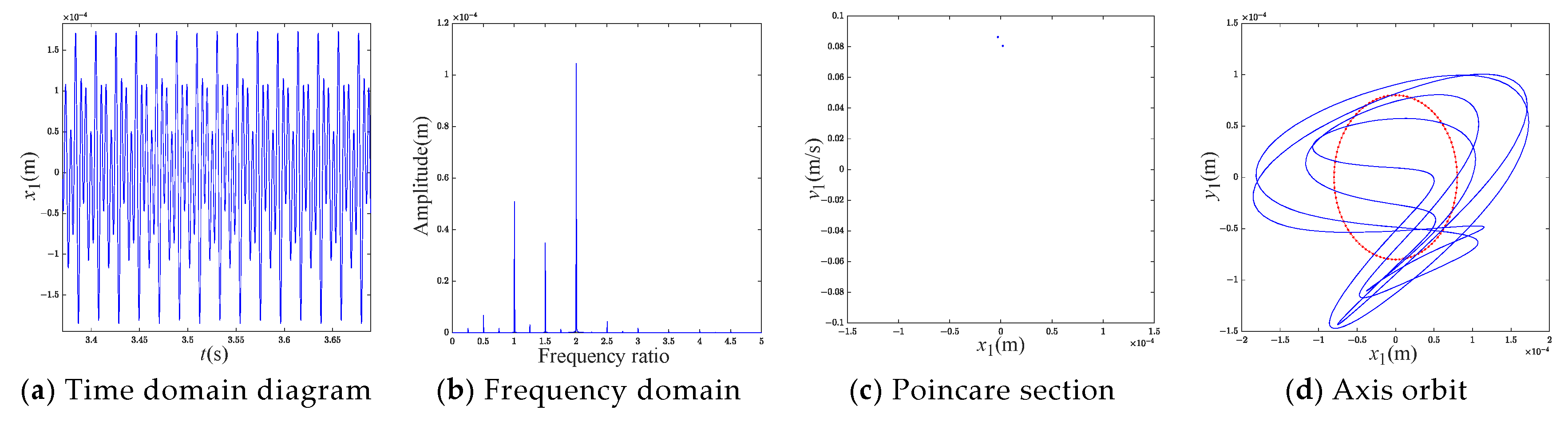
- The vibration stability near half of the switching speed slumps with the increase of the misalignment angle, the maximum amplitude of the vibration response decreases, the range of the quasi-periodic motion is widening; the frequency 2X is the characteristic frequency of the misalignment. Besides, when α = 11°, the system is in the chaotic state, which is so unpredictable that this misalignment angle should be avoided in design.
- Increasing the rub-impact stiffness reduces the stability of the system. The rotor system with rub-impact is actually a nonlinear system with a non-smooth clearance. Rub-impact stiffness has important effects on the nonlinear characteristics of the system. With the increase of stiffness, the number of the chaotic zone increases; and the range of the chaos is widening; the maximum amplitude of the frequency at the critical speed decreases.
- Increasing the rubbing clearance is beneficial to reduce the degree of the rub-impact and enhance the stability of the system. With an increase in clearance, the interval of the quasi-periodic motion decreases, the maximum amplitude of the vibration decreases; the fluctuation range of the vibration gradually narrows. With an increase in clearance up to 0.15 mm, the rub-impact disappears and there is a reverse jumping phenomenon.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Kij | Element of ith row, jth column of the stiffness matrix |
| x, y | Displacement of the wheel in the x and y directions |
| xa, ya | Displacement of the bearing at the left end in the x and y directions |
| xb, yb | Displacement of the bearing at the right end in the x and y directions |
| Kx, Ky | Stiffness matrix of the o’xz plane and o’yz plane of the rotor system |
| Kc | Stiffness matrix considering the axial bending deformation without elastic support |
| θx, θy | Yaw angle of the wheel around the x axis and the y axis |
| Tx, Ty | Torsional moment in the x and y directions |
| ω | Rotational angular velocity of the rotor |
| ωd | Angular velocity of the air-excited turbine disk |
| px, py | Rub-impact force in the x and y directions |
| md, ma, mb | Mass of disk, left and right support |
| c, ca, cb | Damping of disk, left and right support |
| ka, kb | Support stiffness at left and right end |
| l, a, b | Shaft length and length between left, right ends and wheel |
| Acceleration of the wheel in the x and y directions | |
| Velocity of the wheel in the x and y directions | |
| Acceleration of the bearing at the left end in the x and y directions | |
| Velocity of the bearing at the right end in the x and y directions | |
| Acceleration of the bearing at the left end in the x and y directions | |
| Velocity of the bearing at the right end in the x and y directions | |
| Yaw angles acceleration of the wheel around the x axis and the y axis | |
| Yaw angles velocity of the wheel around the x axis and the y axis |
References
- Wang, P.; Xu, H.; Yang, Y.; Ma, H.; He, D.; Zhao, X. Dynamic characteristics of ball bearing-coupling-rotor system with angular misalignment fault. Nonlinear Dyn. 2022, 108, 3391–3415. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, L.; Li, X.; Jiang, L.; Yang, D.; Zhang, F.; Miao, J. Spectrum Analysis of a Coaxial Dual-Rotor System with Coupling Misalignment. Shock. Vib. 2020, 2020, 5856341. [Google Scholar] [CrossRef]
- Lu, X.; Zhang, J.; Ma, L.; Lin, J.; Wang, J.; Wang, J.; Dai, H. Effects of misalignment on the nonlinear dynamics of a two-shaft rotor-bearing-gear coupling system with rub-impact fault. J. Vibroeng. 2017, 19, 5960–5977. [Google Scholar] [CrossRef]
- Fu, C.; Lu, K.; Yang, Y.; Xie, Z.; Ming, A. Nonlinear vibrations of an uncertain dual-rotor rolling bearings system with coupling misalignment. J. Nonlinear Math. Phys. 2022, 29, 388–402. [Google Scholar] [CrossRef]
- Kuan, L.; Hui, C.; Wentao, Z.; Haopeng, Z.; Kaifu, Z.; Chao, F. Nonlinear dynamic behavior of a dual-rotor bearing system with coupling misalignment and rubbing faults. J. Meas. Sci. Technol. 2023, 34, 014005. [Google Scholar] [CrossRef]
- Yang, L.H.; He, K.T.; Guo, Y.L. Reliability analysis of a nonlinear rotor/stator contact system in the presence of aleatory and epistemic uncertainty. J. Mech. Sci. Technol. 2018, 32, 4089–4101. [Google Scholar] [CrossRef]
- Hou, L.; Chen, Y.; Fu, Y.; Li, Z. Nonlinear response and bifurcation analysis of a Duffing type rotor model under sine maneuver load. J. Nonliner Mech. 2016, 78, 133–141. [Google Scholar] [CrossRef]
- Ma, H.; Tai, X.; Han, Q.; Wu, Z.; Wang, D.; Wen, B. A revised model for rubbing between rotating blade and elastic casing. J. Sound Vib. 2015, 337, 301–320. [Google Scholar] [CrossRef]
- Li, B.; Ma, H.; Zeng, J.; Guo, X.; Wen, B. Rotating blade-casing rubbing simulation considering casing flexibility. Int. J. Mech. Sci. 2018, 148, 118–134. [Google Scholar] [CrossRef]
- Zeng, J.; Ma, H.; Yu, K.; Guo, X.; Wen, B. Rubbing response comparisons between single blade and flexible ring using different rubbing force models. Int. J. Mech. Sci. 2019, 164, 105164. [Google Scholar] [CrossRef]
- Guo, X.; Zeng, J.; Ma, H.; Zhao, C.; Yu, X.; Wen, B. A dynamic model for simulating rubbing between blade and flexible casing. J. Sound Vib. 2019, 466, 115036. [Google Scholar] [CrossRef]
- Chen, G.; Li, X.Y. Study on imbalance-misalignment-rubbing coupling faults in aero-engine vibration. J. Aerosp. Power 2009, 24, 2277–2284. [Google Scholar]
- Chen, G. Simulation of casing vibration resulting from blade–casing rubbing and its verifications. J. Sound Vib. 2016, 361, 190–209. [Google Scholar] [CrossRef]
- Prabith, K.; Krishna, I.R.P. Response and stability analysis of a two-spool aero-engine rotor system undergoing multi-disk rub-impact. Int. J. Mech. Sci. 2022, 213, 106861. [Google Scholar] [CrossRef]
- Prabith, K. A dual-shaft aero-engine rotor system, performs the response and stability analysis of multi-disc friction impact. J. Mach. Sci. Sci. 2022, 213, 106861. [Google Scholar]
- Xie, W.; Liu, C.; Wang, N.; Jiang, D. Numerical and experimental analysis of rubbing–misalignment mixed fault in a dual-rotor system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 235, 3179–3198. [Google Scholar] [CrossRef]
- Liu, Y.; Xin, X.; Zhao, Y.; Ming, S.; Ma, Y.; Han, J. Study on Coupling Fault Dynamics of Sliding Bearing-Rotor System. J. Comput. Nonlinear Dyn. 2019, 14, 041005. [Google Scholar] [CrossRef]
- Yu, J.J.; Goldman, P.; Bently, D.E.; Muzynska, A. Rotor/Seal Experimental and Analytical Study on Full Annular Rub. J. Eng. Gas Turbines Power 2002, 124, 340–350. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, X.; Hua, H.; Liang, X. Nonlinear stochastic dynamics of a rub-impact rotor system with probabilistic uncertainties. Nonlinear Dyn. 2020, 102, 2229–2246. [Google Scholar] [CrossRef]
- Sun, W.; Yan, Z.; Tan, T.; Zhao, D.; Luo, X. Nonlinear characterization of the rotor-bearing system with the oil-film and unbalance forces considering the effect of the oil-film temperature. Nonlinear Dyn. 2018, 92, 1119–1145. [Google Scholar] [CrossRef]
- Liu, Y.; Dou, J.X.; Wen, B.C. Identification technique of misalignment-rubbing coupling fault in dual-disk rotor system supported by rolling bearing. J. Vibroeng. 2015, 17, 287–299. [Google Scholar]
- Liu, Y.P.; Tai, X.Y. Dynamic characteristics of misalignment-rubbing coupling fault for rotor system. J. Dongb Daxue Xuebao/J. Northeastern Univ. 2013, 34, 564–568. [Google Scholar]
- Han, T.; Xie, W.Z.; Pei, Z.Y. Semi-supervised adversarial discriminative learning approach for intelligent fault diagnosis of wind turbine. J. Inf. Sci. 2023, 648, 119496. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awrejcewicz, J.; Hafez, S.T.; Hou, L.; Aboudaif, M.K. Stability, bifurcation, and vibration control of a discontinuous nonlinear rotor model under rub-impact effect. Nonlinear Dyn. 2023, 111, 20661–20697. [Google Scholar] [CrossRef]
- Jin, M.; Wang, A.L.; Wang, Q.; Wang, L. Rub-impact dynamic analysis of the central tie rod rotor-blade-casing coupling system with the Hirth couplings connection. J. Vib. Eng. Technol. 2023, 1–25. [Google Scholar] [CrossRef]
- Abouelanouar, B.; Elkihel, A.; Gziri, H. Experimental study on energy consumption in rotating machinery caused by misalignment. J. SN Appl. Sci. 2020, 2, 1215. [Google Scholar] [CrossRef]
- Fu, C.; Zhu, W.; Zheng, Z.; Sun, C.; Yang, Y.; Lu, K. Nonlinear responses of a dual-rotor system with rub-impact fault subject to interval uncertain parameters. J. Mech Syst Signal Process. 2022, 170, 108827. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Mass of disk, left and right support md, ma, mb (kg) | 34.6, 2, 2 |
| Damping of disk, left and right support c, ca, cb (N·s/m) | 2100, 1050, 1050 |
| Support stiffness at left and right end ka, kb (N/m) | 1 × 107, 1 × 107 |
| Shaft length and wheel position l, a, b (m) | 0.5, 0.5/3, 1/3 |
| Polar and diameter moment of inertia of the disk Jp, Jd (kg·m2) | 0.7, 0.35 |
| Wheel eccentricity e (m) | 3 × 10−5 |
| Elastic modulus of shaft E (kg·m2) | 2.09 × 1011 |
| Moment of inertia of cross section of shaft I (m4) | 1.2566 × 10−7 |
| Speed Range (rad/s) | Motion Type | Speed Range (rad/s) | Motion Type |
|---|---|---|---|
| 1~584 | Period-1 | 584~770 | Quasi-periodic |
| 770~1018 | Period-1 | 1028~1225 | Period-2 |
| 1225~1571 | Period-1 | 1571~1726 | Period-3 |
| 1726~1832 | Quasi-periodic | 1832~3000 | Period-1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nan, G.; Yang, S.; Yu, D. Misalignment and Rub-Impact Coupling Dynamics of Power Turbine Rotor with Offset Disk. Appl. Sci. 2024, 14, 1298. https://doi.org/10.3390/app14031298
Nan G, Yang S, Yu D. Misalignment and Rub-Impact Coupling Dynamics of Power Turbine Rotor with Offset Disk. Applied Sciences. 2024; 14(3):1298. https://doi.org/10.3390/app14031298
Chicago/Turabian StyleNan, Guofang, Sirui Yang, and Dengliang Yu. 2024. "Misalignment and Rub-Impact Coupling Dynamics of Power Turbine Rotor with Offset Disk" Applied Sciences 14, no. 3: 1298. https://doi.org/10.3390/app14031298
APA StyleNan, G., Yang, S., & Yu, D. (2024). Misalignment and Rub-Impact Coupling Dynamics of Power Turbine Rotor with Offset Disk. Applied Sciences, 14(3), 1298. https://doi.org/10.3390/app14031298