

A Multi-Phase Brushless Direct Current Motor Design and Its Implementation in Medium-Altitude Long-Endurance Unmanned Aerial Vehicles


Abstract
1. Introduction
2. Methodology
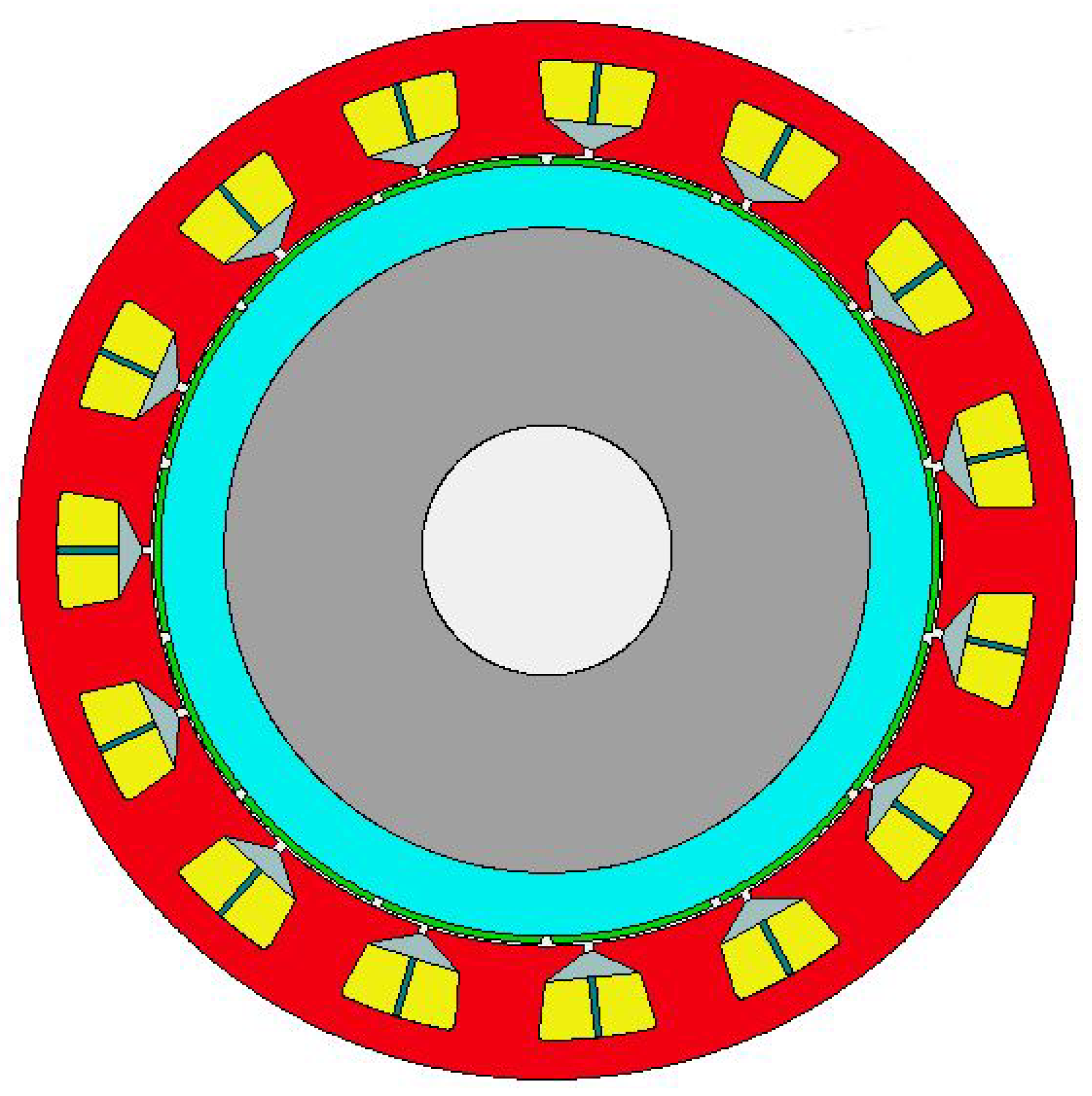
2.1. Multi-Phase BLDC Motor Design
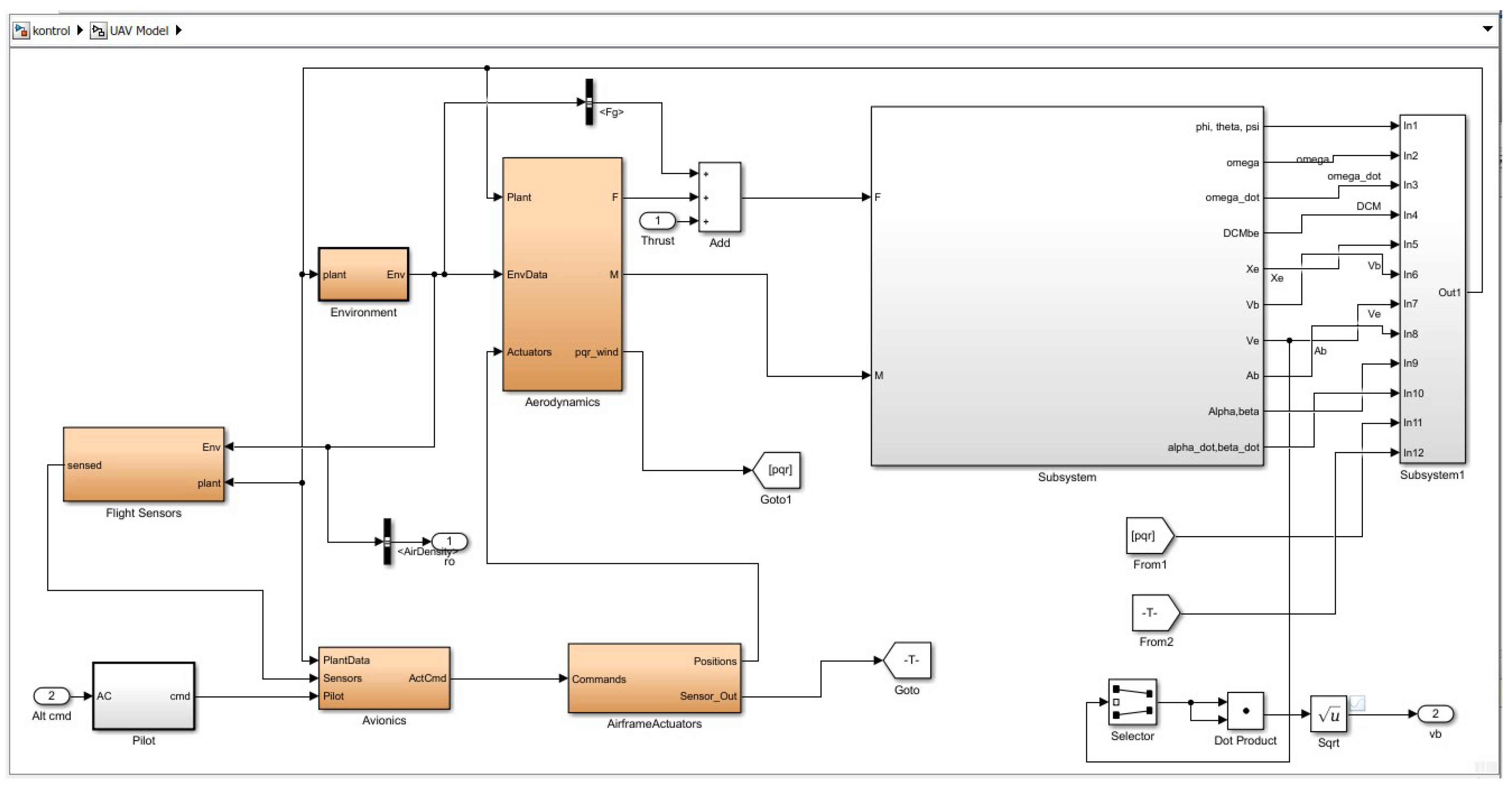
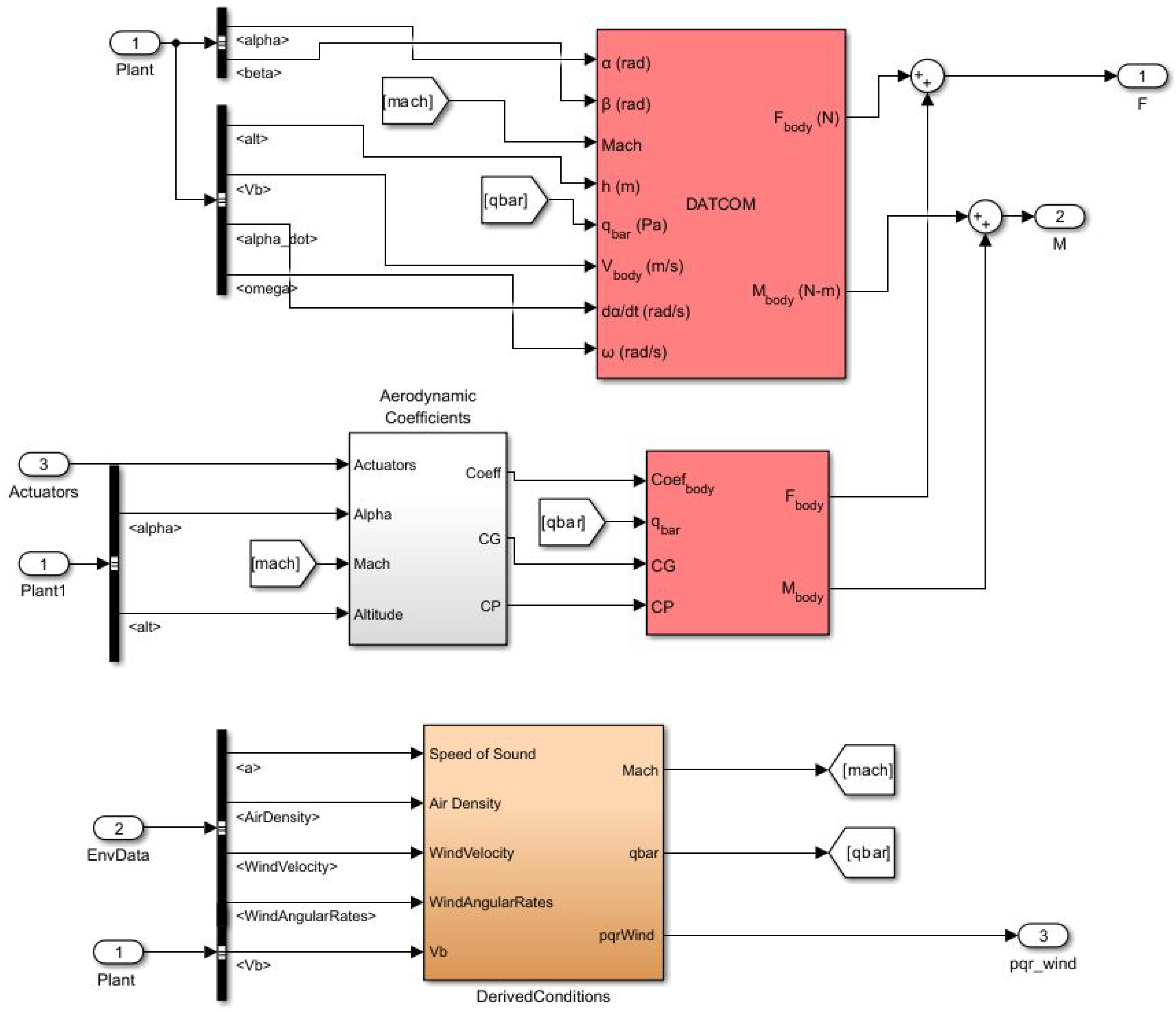
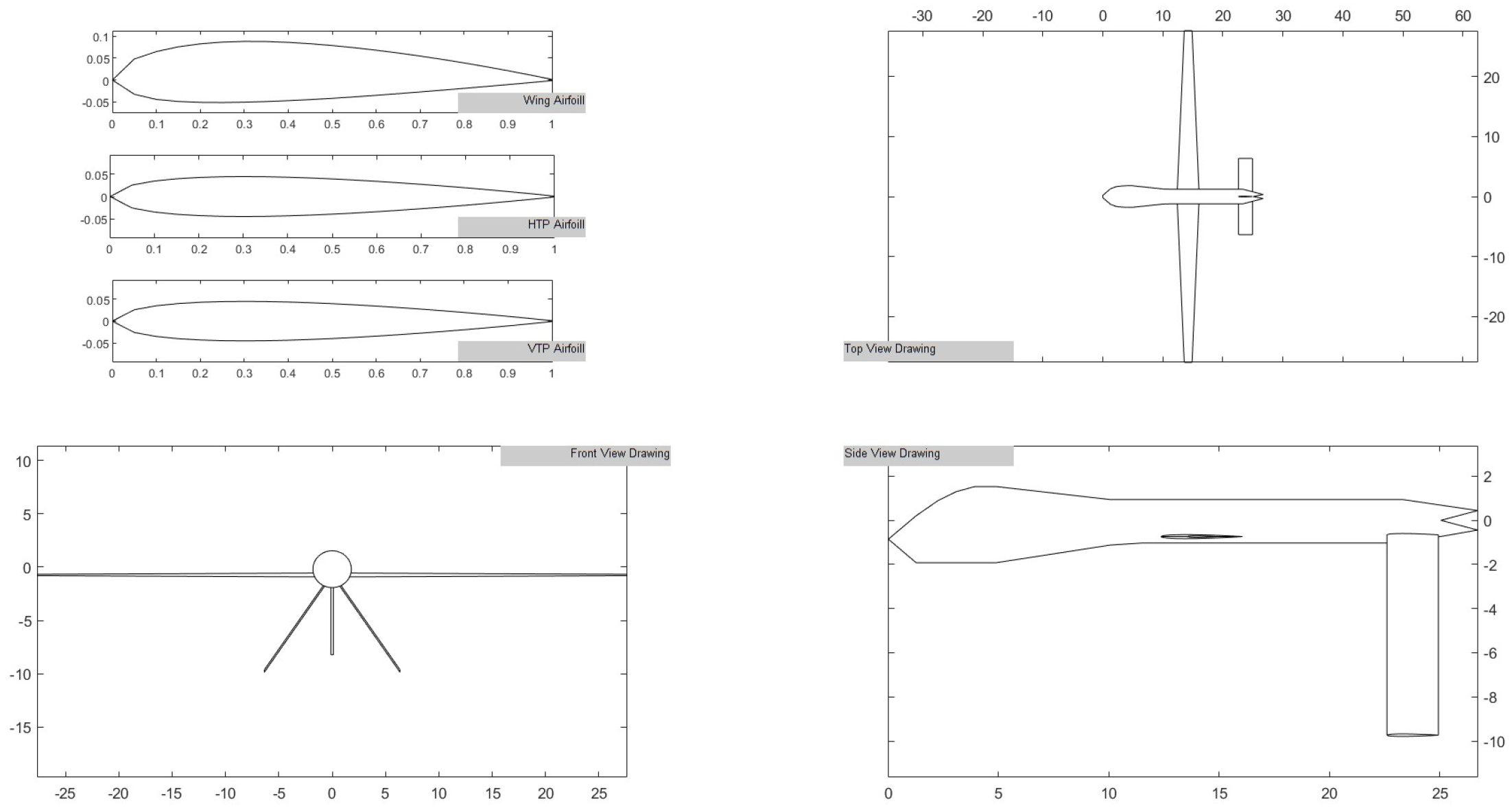
2.2. Development of UAV Model and Auxiliary Components
2.3. Integration of Battery Model
2.4. Flight Profile
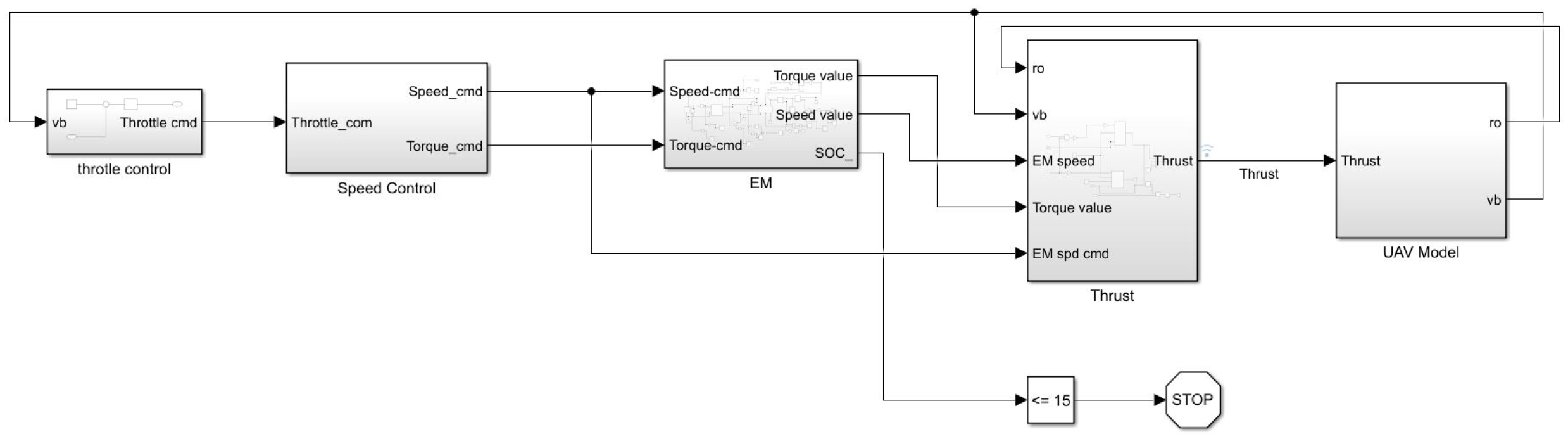
2.5. Combination of Separately Designed Blocks
3. Results
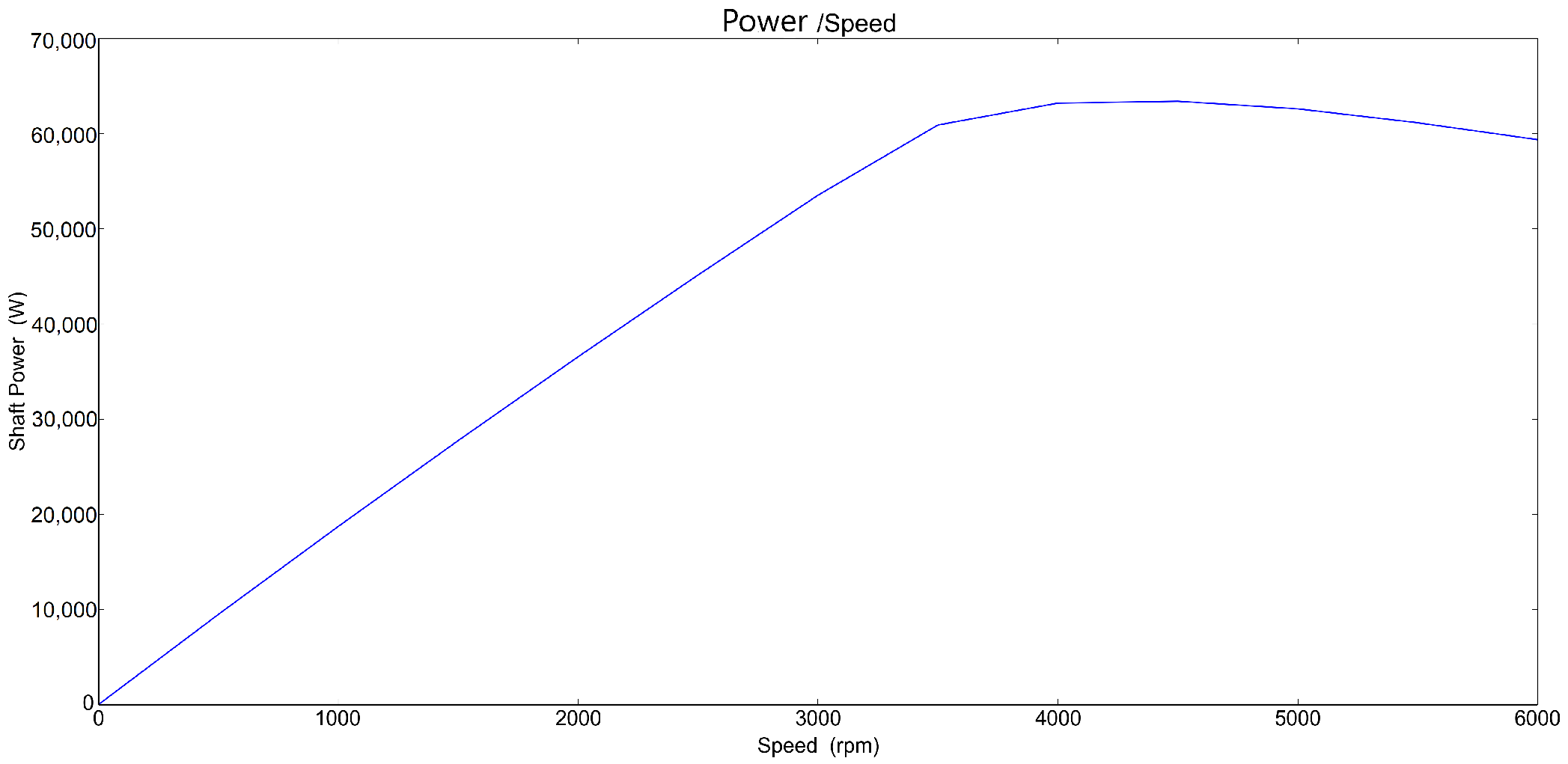
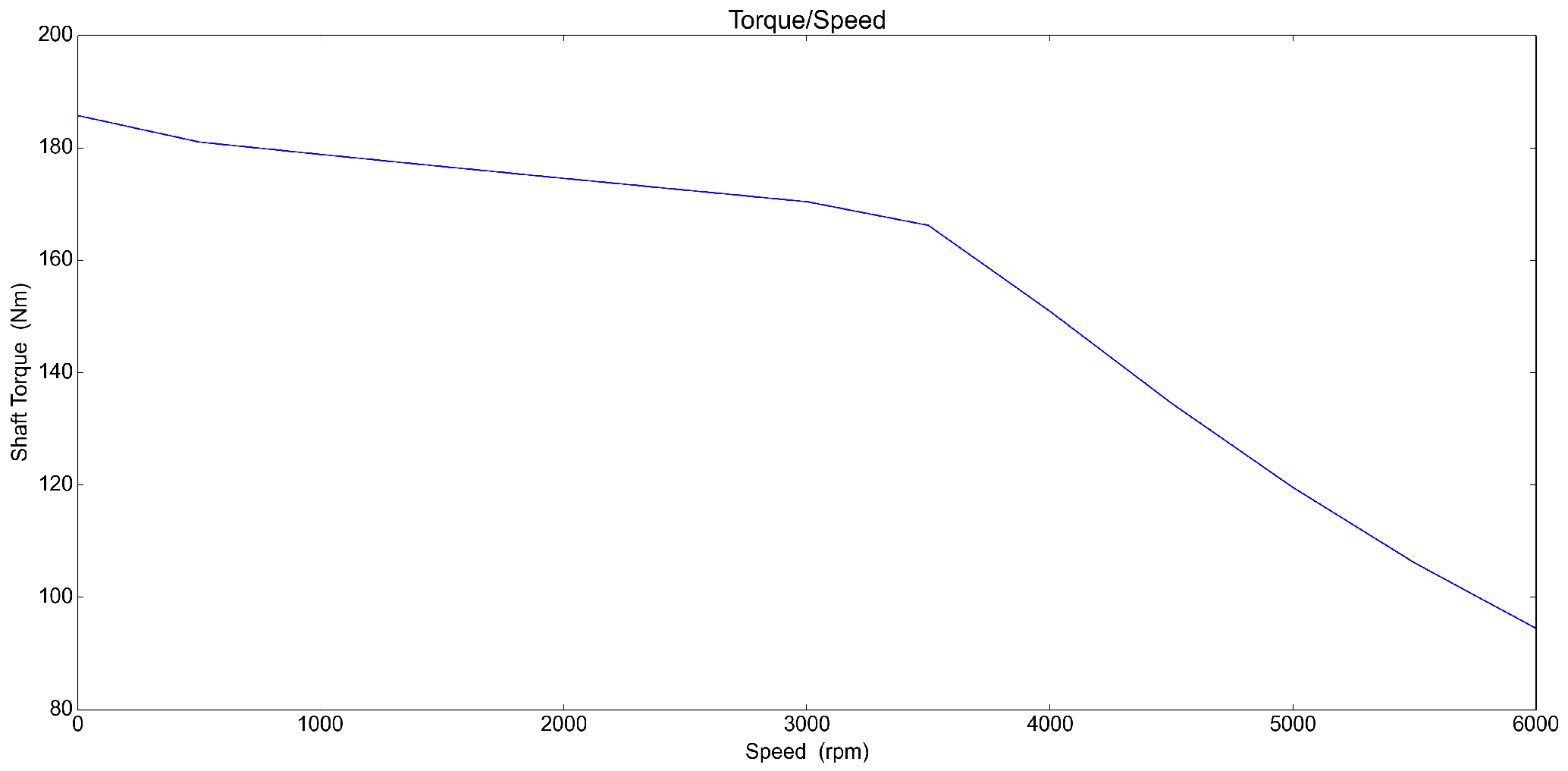
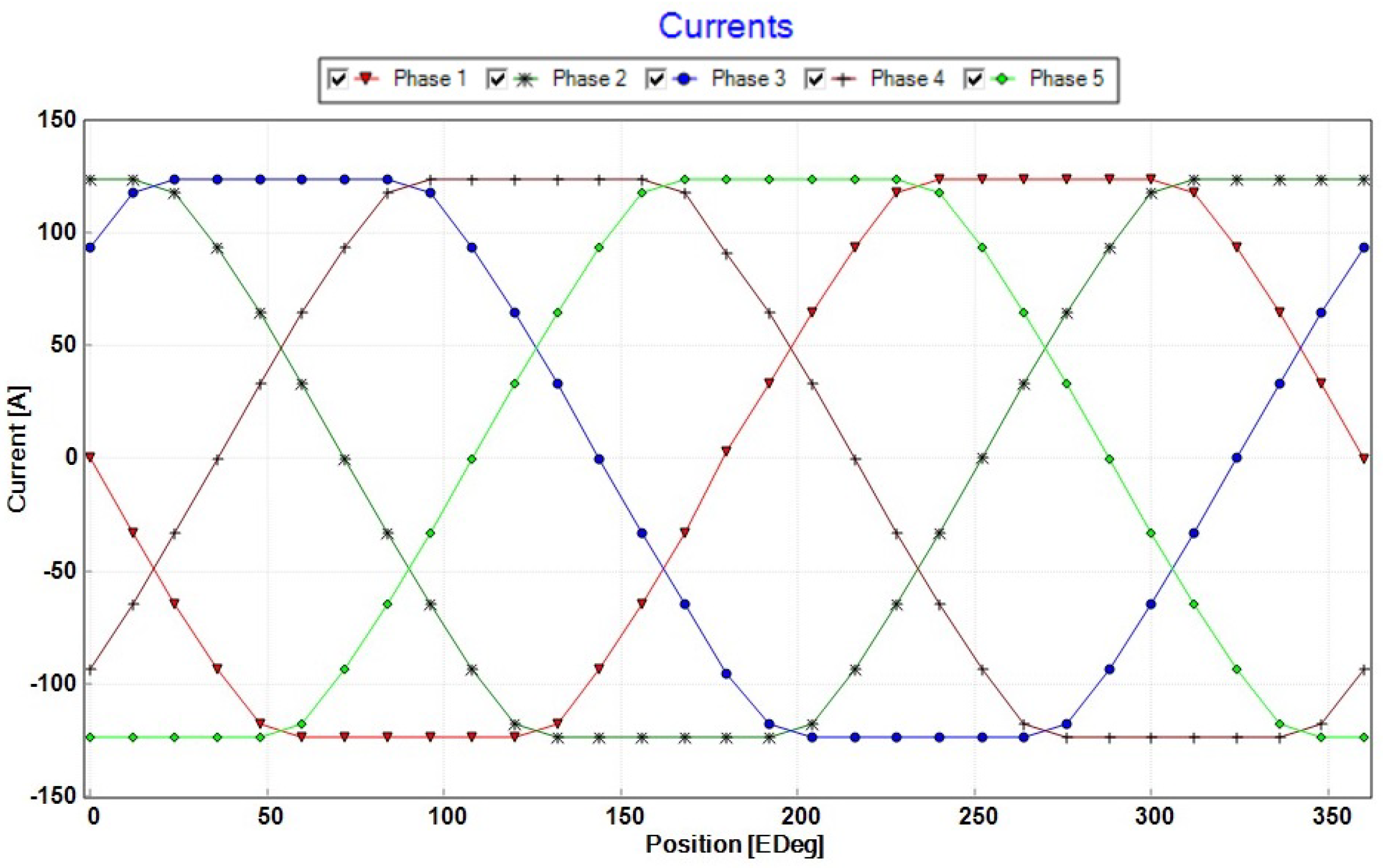
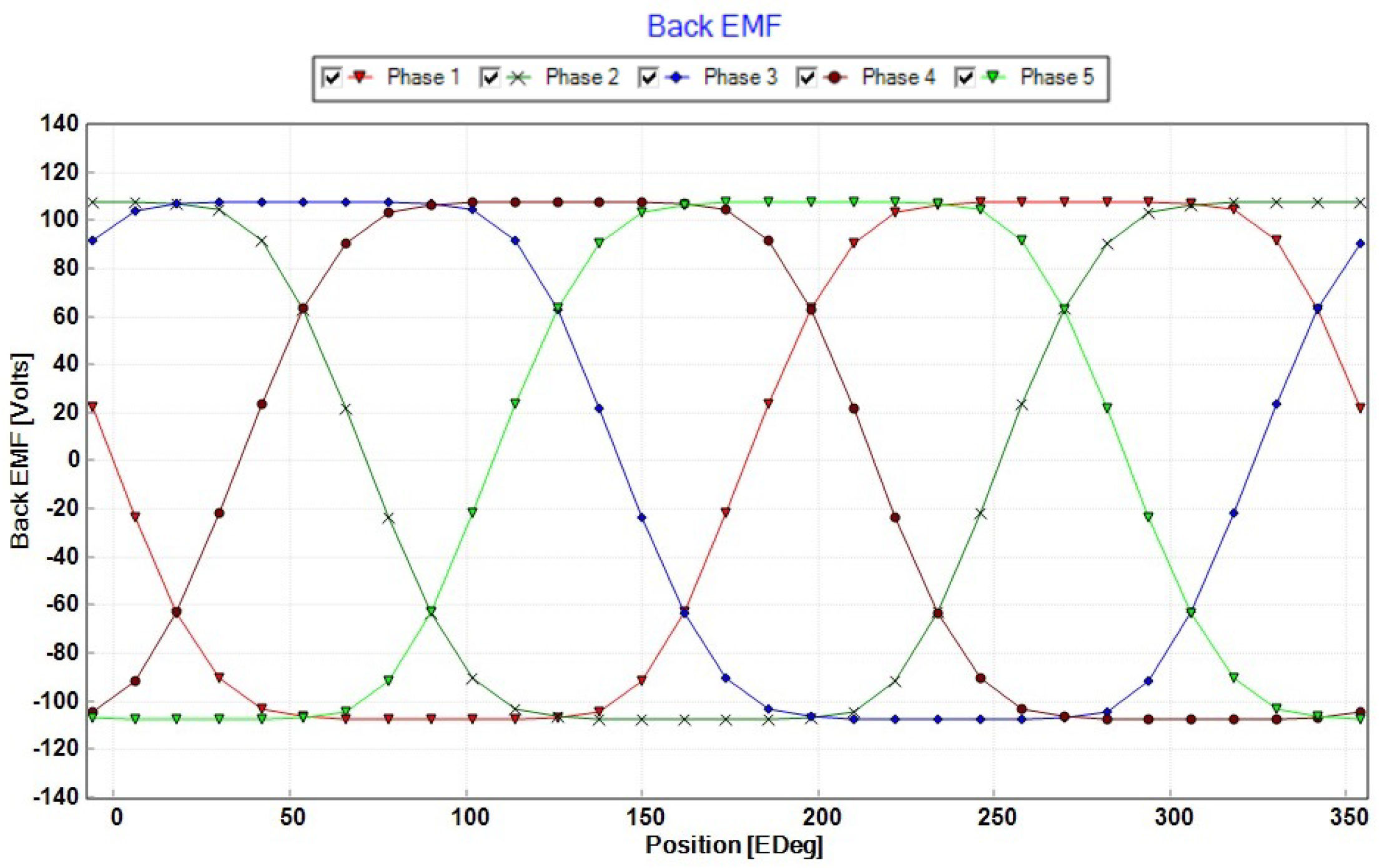
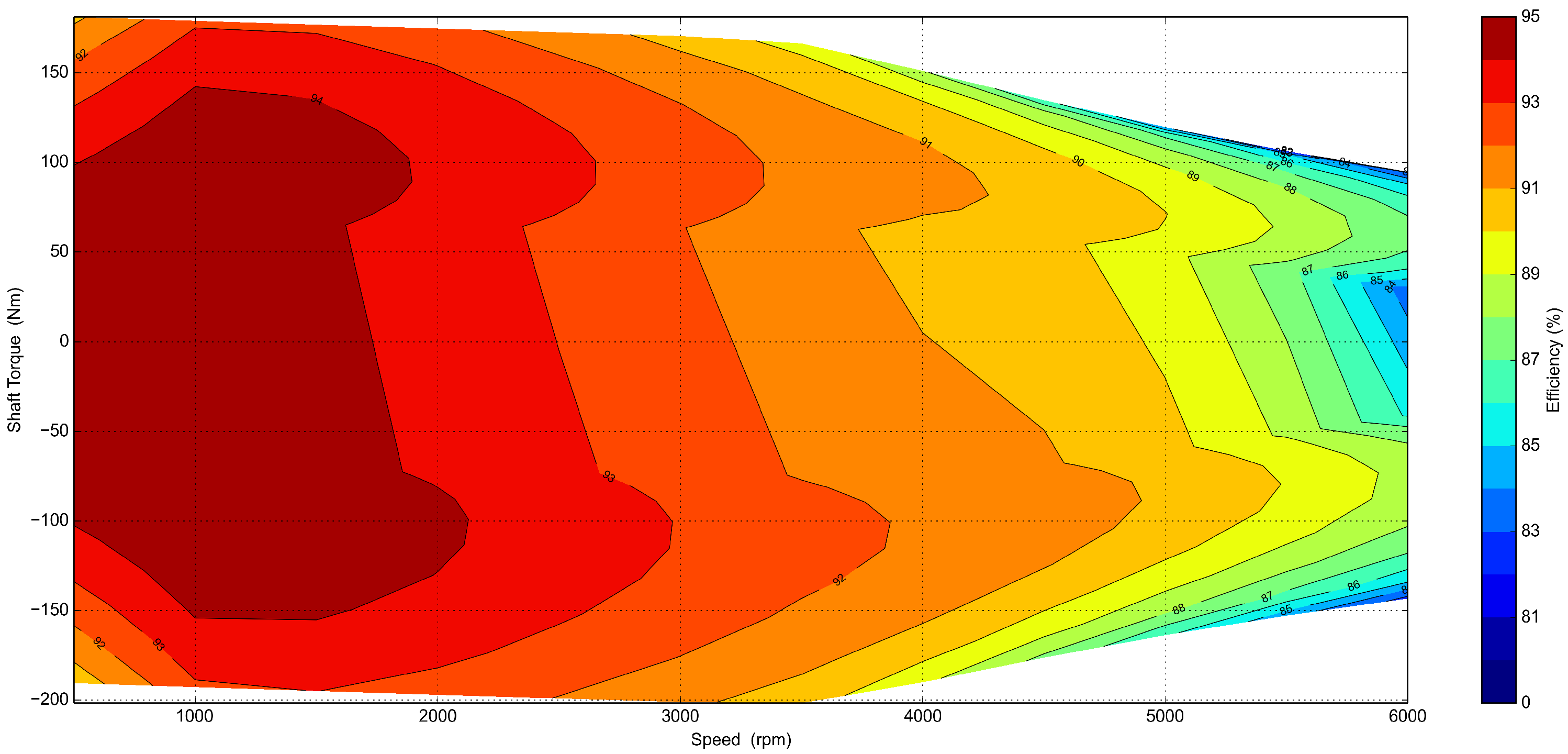
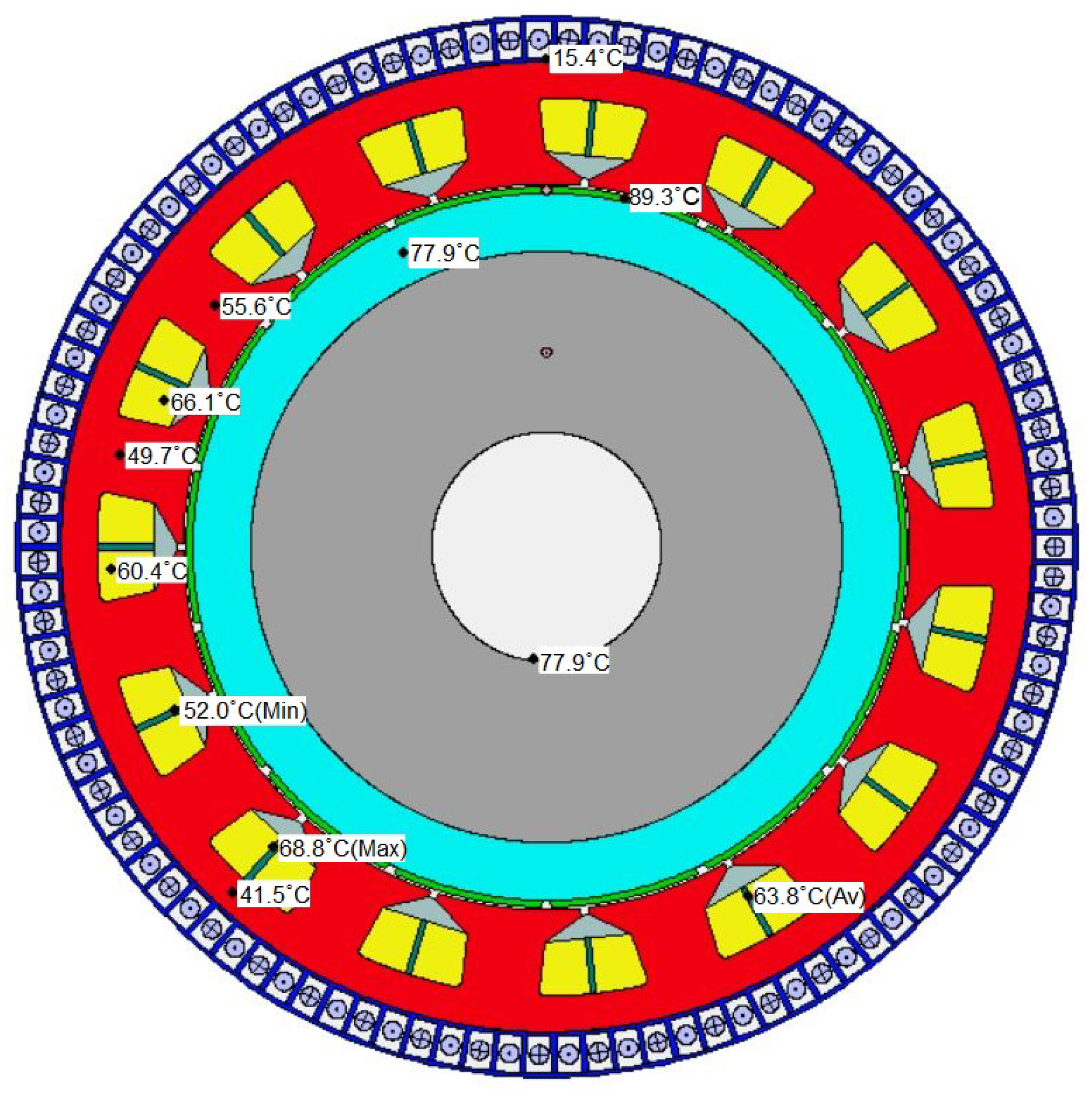
3.1. Results for Designed Five-Phase BLDC Motor
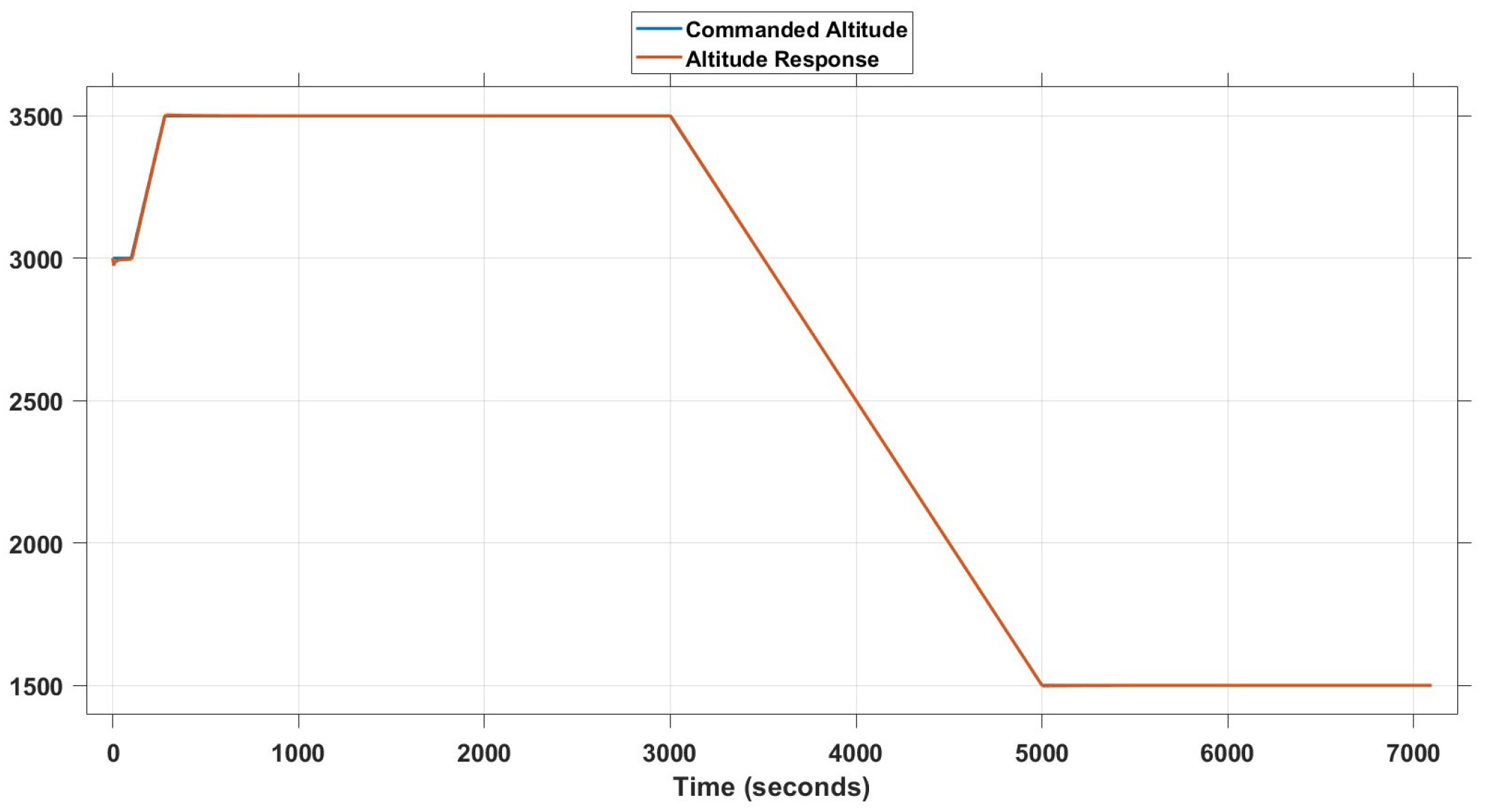
3.2. Simulation of Combined Models
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MEA | More Electric Aircraft |
| AEA | All Electric Aircraft |
| UAV | Unmanned Aerial Vehicle |
| ICE | Internal Combustion Engine |
| MALE | Medium-Altitude Long Endurance |
| DC | Direct Current |
| BLDC | Brushless DC |
| DoF | Degrees of Freedom |
| ft | feet |
| rpm | revolutions per minute |
| A | Ampere |
| Nm | Newton Meter |
| T | Tesla |
| V | Volt |
| Ah | Ampere-hour |
| W | Watt |
| kW | kilo-Watt |
| kg | kilogram |
| m/s | meters per second |
| mm | millimeter |
| SoC | State of Charge |
| MTOW | Maximum Take-Off Weight |
References
- Ye, X.; Savvarisal, A.; Tsourdos, A.; Zhang, D.; Jason, G. Review of hybrid electric powered aircraft, its conceptual design and energy management methodologies. Chin. J. Aeronaut. 2021, 34, 432–450. [Google Scholar]
- Fahimi, B.; Lewis, L.H.; Miller, J.M.; Pekarek, S.D.; Boldea, I.; Ozpineci, B.; Hameyer, K.; Schulz, S.; Ghaderi, A.; Popescu, M.; et al. Automotive Electric Propulsion Systems: A Technology Outlook. IEEE Trans. Transp. Electrif. 2023, 10, 5190–5214. [Google Scholar] [CrossRef]
- Milev, G. Power Quality Problems on Ships with Electrical Propulsion. In Proceedings of the 2023 15th Electrical Engineering Faculty Conference (BulEF), Varna, Bulgaria, 16–19 September 2023; pp. 1–4. [Google Scholar]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands; Heidelberg, Germany; New York, NY, USA; London, UK, 2015; Volume 1. [Google Scholar]
- Koster, J.; Humbargar, C.; Serani, E.; Velazco, A.; Hillery, D.; Makepeace, L. Hybrid electric integrated optimized system (HELIOS)-design of a hybrid propulsion system for aircraft. In Proceedings of the 49th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011; p. 1011. [Google Scholar]
- Sliwinski, J.; Gardi, A.; Marino, M.; Sabatini, R. Hybrid-electric propulsion integration in unmanned aircraft. Energy 2017, 140, 1407–1416. [Google Scholar] [CrossRef]
- Looney, B. Statistical review of world energy, 2020. Bp 2020, 69, 66. [Google Scholar]
- Rakhra, P.; Norman, P.; Galloway, S.; Burt, G. Modelling and simulation of a mea twin generator uav electrical power system. In Proceedings of the 2011 46th International Universities’ Power Engineering Conference (UPEC), Soest, Germany, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Zhang, G.; Ma, C.; Sun, H.; Zhang, L.; Liu, L.; Wang, K. Optimization design of interior PM starter-generator. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–5. [Google Scholar]
- Fugaro, F.; Palmieri, M.; Cascella, G.L.; Cupertino, F. Aeronautical hybrid propulsion for More Electric Aircraft: A case of study. In Proceedings of the 2018 AEIT International Annual Conference, Bari, Italy, 3–5 October 2018; pp. 1–6. [Google Scholar]
- Donateo, T.; De Pascalis, C.L.; Ficarella, A. Synergy effects in electric and hybrid electric aircraft. Aerospace 2019, 6, 32. [Google Scholar] [CrossRef]
- Arabul, A.Y.; Kurt, E.; Keskin Arabul, F.; Senol, İ.; Schrötter, M.; Bréda, R.; Megyesi, D. Perspectives and development of electrical systems in more electric aircraft. Int. J. Aerosp. Eng. 2021, 2021, 5519842. [Google Scholar] [CrossRef]
- Kaynak, B.; Arabul, A.Y. Aerodynamic Efficiency and Performance Development in an Electric Powered Fixed Wing Unmanned Aerial Vehicle. Electr. Power Components Syst. 2023, 51, 724–732. [Google Scholar] [CrossRef]
- Zhang, B.; Song, Z.; Zhao, F.; Liu, C. Overview of propulsion systems for unmanned aerial vehicles. Energies 2022, 15, 455. [Google Scholar] [CrossRef]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review. Preprints 2018. [Google Scholar] [CrossRef]
- Çoban, S.; Oktay, T. Unmanned Aerial Vehicles (UAVs) According to Engine Type. J. Aviat. 2018, 2, 177–184. [Google Scholar] [CrossRef]
- Xiao, C.; Wang, B.; Zhao, D.; Wang, C. Comprehensive investigation on Lithium batteries for electric and hybrid-electric unmanned aerial vehicle applications. Therm. Sci. Eng. Prog. 2023, 38, 101677. [Google Scholar] [CrossRef]
- Sahoo, S.; Zhao, X.; Kyprianidis, K. A review of concepts, benefits, and challenges for future electrical propulsion-based aircraft. Aerospace 2020, 7, 44. [Google Scholar] [CrossRef]
- Sziroczak, D.; Jankovics, I.; Gal, I.; Rohacs, D. Conceptual design of small aircraft with hybrid-electric propulsion systems. Energy 2020, 204, 117937. [Google Scholar] [CrossRef]
- González-Espasandín, Ó.; Leo, T.J.; Navarro-Arévalo, E. Corrigendum to “Fuel Cells: A Real Option for Unmanned Aerial Vehicles Propulsion”. Sci. World J. 2015, 2015, 419786. [Google Scholar] [CrossRef] [PubMed]
- Dantsker, O.D.; Caccamo, M.; Imtiaz, S. Electric propulsion system optimization for long-endurance and solar-powered unmanned aircraft. In Proceedings of the 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Indianapolis, IN, USA, 22–24 August 2019; pp. 1–24. [Google Scholar]
- Barrero, F.; Duran, M.J. Recent advances in the design, modeling, and control of multiphase machines—Part I. IEEE Trans. Ind. Electron. 2015, 63, 449–458. [Google Scholar] [CrossRef]
- Cavagnino, A.; Li, Z.; Tenconi, A.; Vaschetto, S. Integrated generator for more electric engine: Design and testing of a scaled-size prototype. IEEE Trans. Ind. Appl. 2013, 49, 2034–2043. [Google Scholar] [CrossRef]
- Iftikhar, M.H.; Park, B.G.; Kim, J.W. Design and analysis of a five-phase permanent-magnet synchronous motor for fault-tolerant drive. Energies 2021, 14, 514. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines; John Wiley & Sons Ltd.: Chichester, UK, 2013. [Google Scholar]
- Hendershot, J.R.; Miller, T.J.E. Design of Brushless Permanent-Magnet Motors; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Forces, U.S.A. MQ-1B Predator. 2015. Available online: https://www.af.mil/About-Us/Fact-Sheets/Display/Article/104469/mq-1b-predator/ (accessed on 28 April 2024).
- Vukelich, S.R.; Williams, J.E. The USAF Stability and Control Datcom Volume I, Users Manual McDonnell Douglas Astronautics Company St. Louis Division Public Domain Aeronautical Software. 1999. Available online: https://www.pdas.com/datcomrefs.html (accessed on 15 January 2023).
- Turevskiy, A.; Gage, S.; Buhr, C. Model-based design of a new light-weight aircraft. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6371. [Google Scholar]
- Frye, A.J.; Mehiel, E.A. Modeling and simulation of vehicle performance in a UAV swarm using horizon simulation framework. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1980. [Google Scholar]
- Pipistrel. Pipistrel Velis Electro Pilot’s Operating Handbook; POH-128-00-40-001, Rev:0; Pipistrel: Ajdovščina, Slovenia, 2020. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated power | 40 kW |
| Rated speed | 2500 rpm |
| Slot/pole combination | 15/14 |
| DC voltage | 400 V |
| Number of phases | 5 |
| Parameter | Value |
|---|---|
| Stator inner diameter | 253 mm |
| Stator outer diameter | 338 mm |
| Air-gap length | 0.953 mm |
| Stator lamination length | 74 mm |
| Rotor and magnet lamination length | 76 mm |
| Stator tooth height | 30 mm |
| Stator tooth width | 27 mm |
| Stator yoke height | 13 mm |
| Rotor yoke height | 13 mm |
| Shaft diameter | 208 mm |
| Magnet height | 2.3 mm |
| Number of turns in phase winding | 27 |
| Machine Section | Material |
|---|---|
| Stator back iron | M350-50A |
| Rotor back iron | M350-50A |
| Magnets | N42UH |
| Phase windings | Copper |
| Parameter | Value |
|---|---|
| Wingspan | 16.8 m (55 ft) |
| Length | 8.22 m (27 ft) |
| Height | 2.1 m (7 ft) |
| Maximum take-off weight (MTOW) | 1020 kg |
| Empty weight | 512 kg |
| Payload | 204 kg |
| Fuel capacity | 300 kg |
| Cruise speed | 36 m/s (up to 60 m/s) |
| Parameter | Value |
|---|---|
| Nominal voltage | 345 V |
| Cell capacity | 78 Ah |
| Cell configuration | 96S12P |
| Maximum continuous discharge power | 40 kW |
| Battery weight | 70 kg |
| Parameter | Value |
|---|---|
| Pitch | Fixed |
| Diameter | 72 inch |
| Blade Number | 2 |
| Parameter | Calculated Value | Simulation Results |
|---|---|---|
| Current | 107.52 A | 123.5 A |
| Shaft torque | 152 Nm | 150.32 Nm |
| Air-gap flux density | 0.8 T | 0.75 T |
| Stator yoke flux density | 1.4 T | 1.739 T |
| Stator tooth flux density | 1.6 T | 1.583 T |
| Rotor yoke flux density | 1.3 T | 1.21 T |
| Current density | 5.6 A/mm2 | 5.6 A/mm2 |
| Parameter | Value |
|---|---|
| Copper losses | 484.8 W |
| Magnet losses | 1490 W |
| Stator iron losses | 1150 W |
| Rotor iron losses | 93.04 W |
| Total loss | 3218 W |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurt, E.; Arabul, A.Y.; Keskin Arabul, F.; Senol, I. A Multi-Phase Brushless Direct Current Motor Design and Its Implementation in Medium-Altitude Long-Endurance Unmanned Aerial Vehicles. Appl. Sci. 2024, 14, 11550. https://doi.org/10.3390/app142411550
Kurt E, Arabul AY, Keskin Arabul F, Senol I. A Multi-Phase Brushless Direct Current Motor Design and Its Implementation in Medium-Altitude Long-Endurance Unmanned Aerial Vehicles. Applied Sciences. 2024; 14(24):11550. https://doi.org/10.3390/app142411550
Chicago/Turabian StyleKurt, Emre, Ahmet Yigit Arabul, Fatma Keskin Arabul, and Ibrahim Senol. 2024. "A Multi-Phase Brushless Direct Current Motor Design and Its Implementation in Medium-Altitude Long-Endurance Unmanned Aerial Vehicles" Applied Sciences 14, no. 24: 11550. https://doi.org/10.3390/app142411550
APA StyleKurt, E., Arabul, A. Y., Keskin Arabul, F., & Senol, I. (2024). A Multi-Phase Brushless Direct Current Motor Design and Its Implementation in Medium-Altitude Long-Endurance Unmanned Aerial Vehicles. Applied Sciences, 14(24), 11550. https://doi.org/10.3390/app142411550