
Model-Free Adaptive Control of an Active Half-Vehicle-Seat System Coupled with a Nonlinear Energy Sink Inerter (NESI)



Abstract
1. Introduction
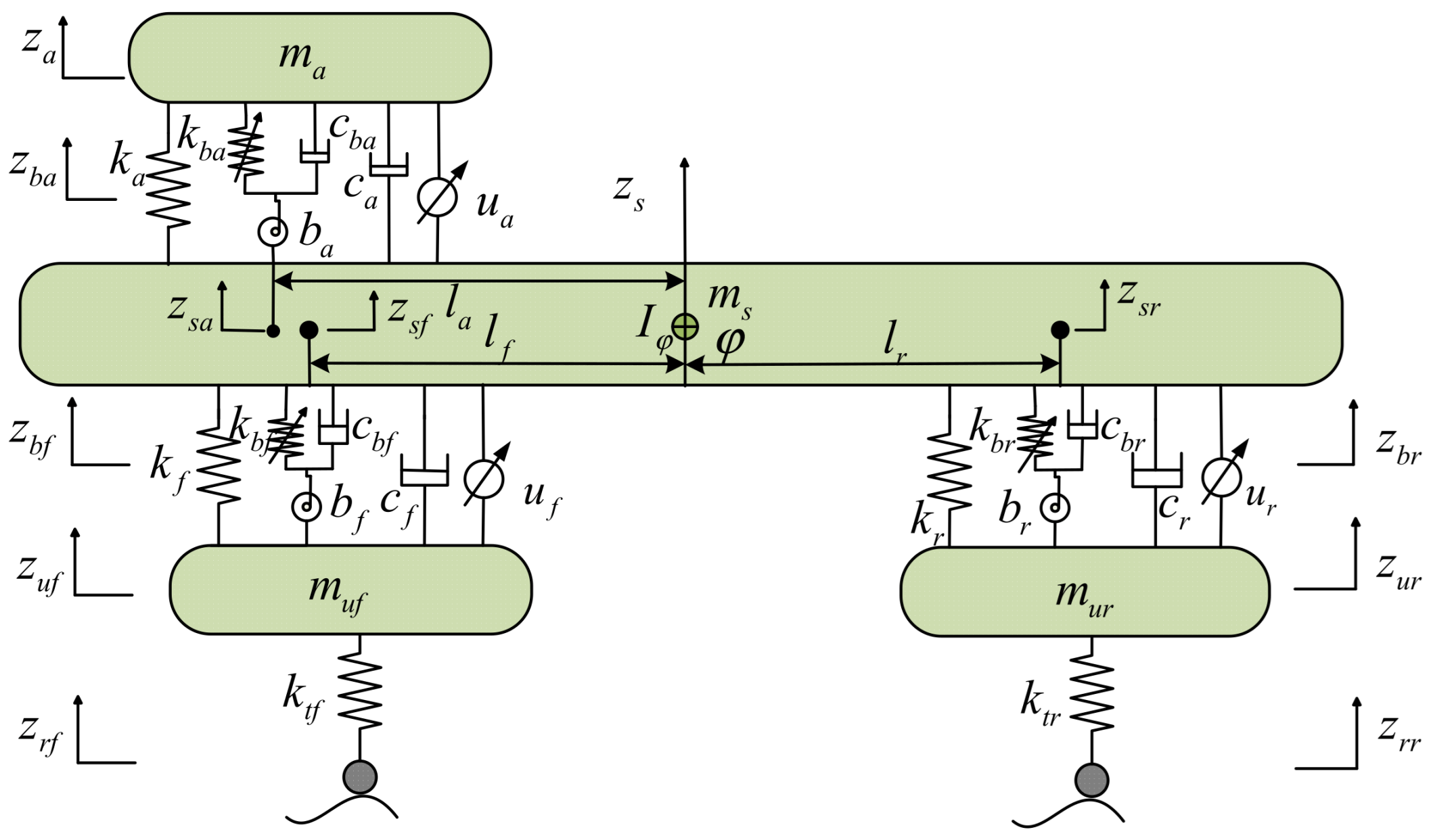
2. Active HVS System Coupled with NESI
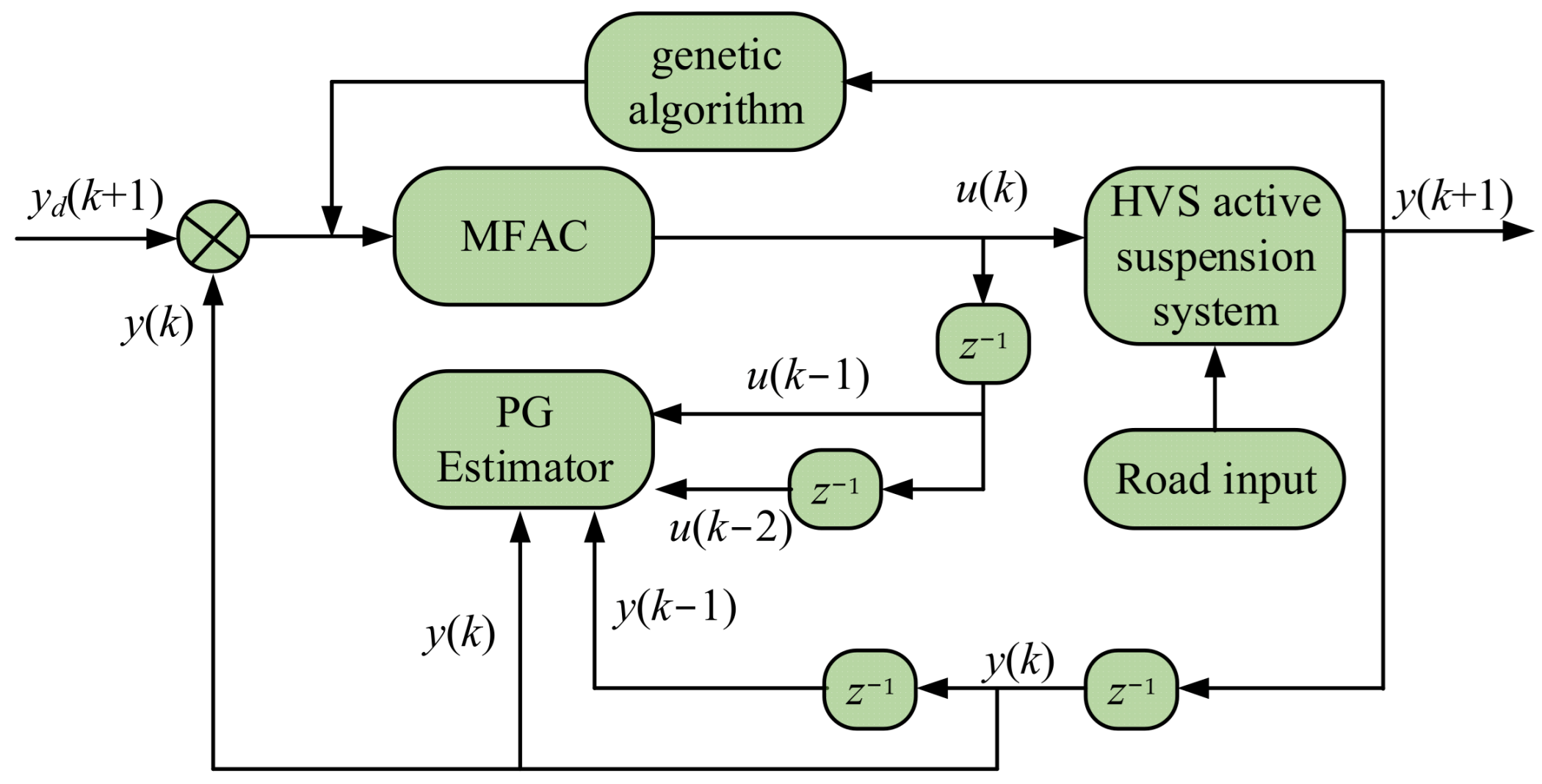
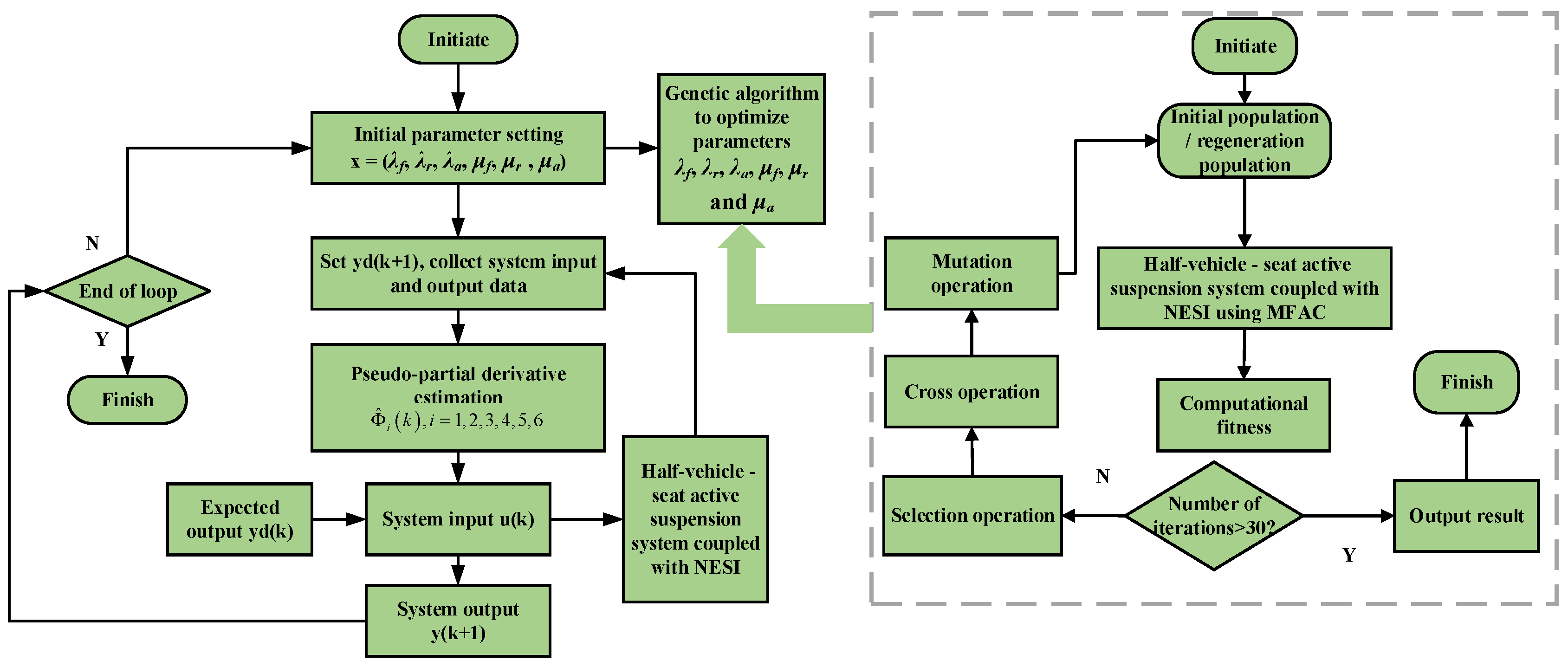
3. MFAC Method Based on Genetic Algorithm
- (1)
- ; M is a constant.
- (2)
- When , the parameters and choose appropriate values; the system output is bounded and stable.
4. Random Pavement Excitation
5. Pavement Shock Excitation
6. Conclusions
- (1)
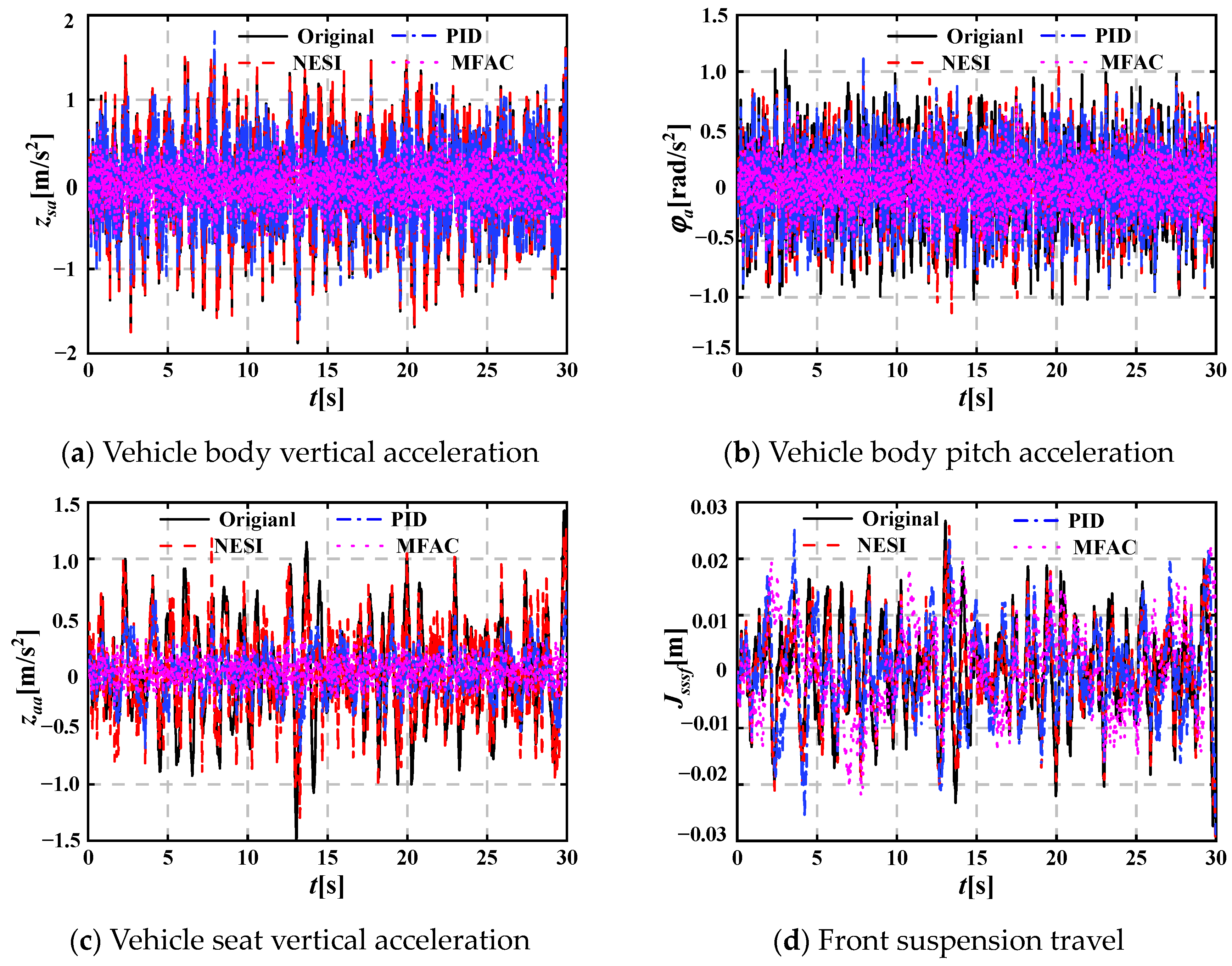
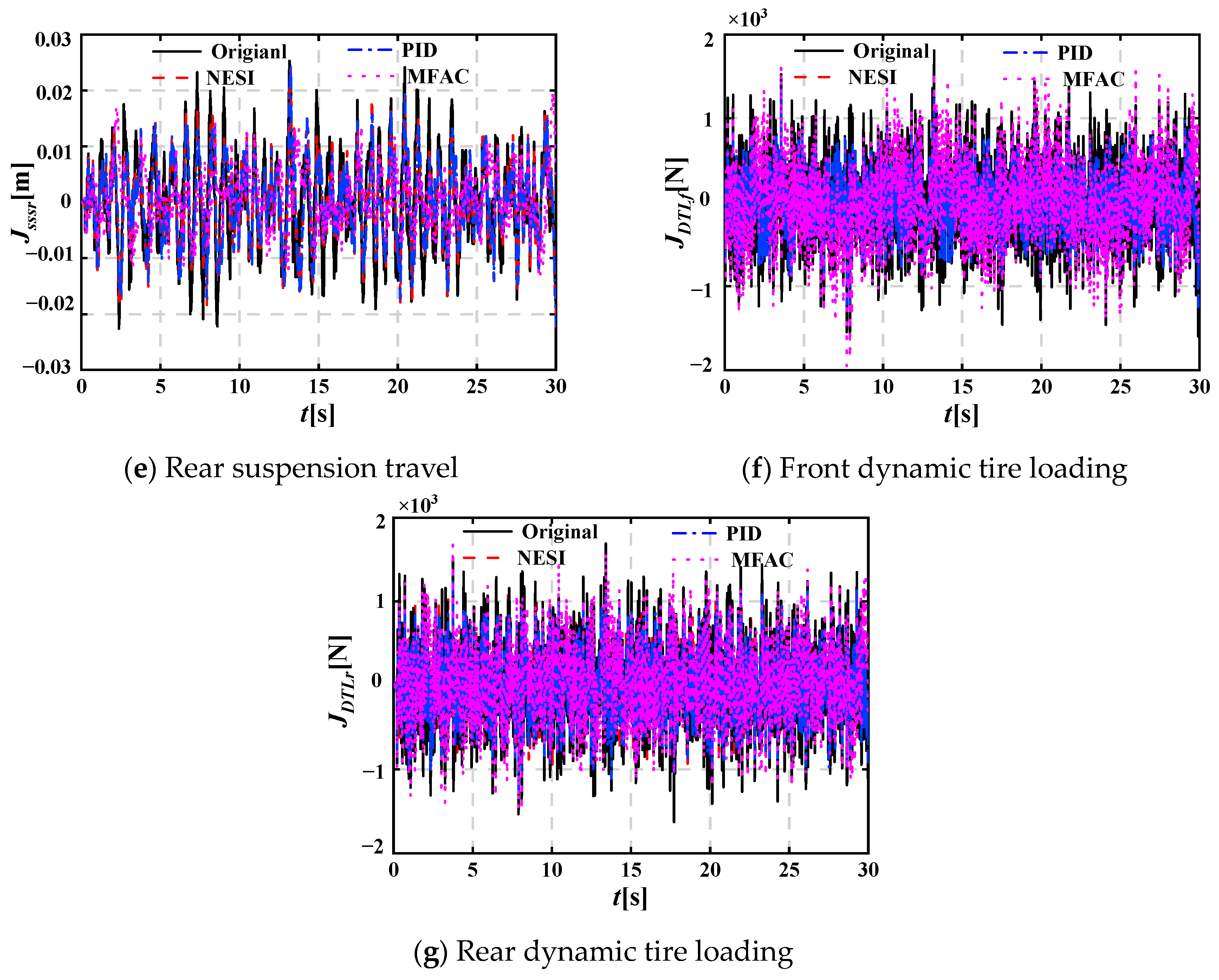
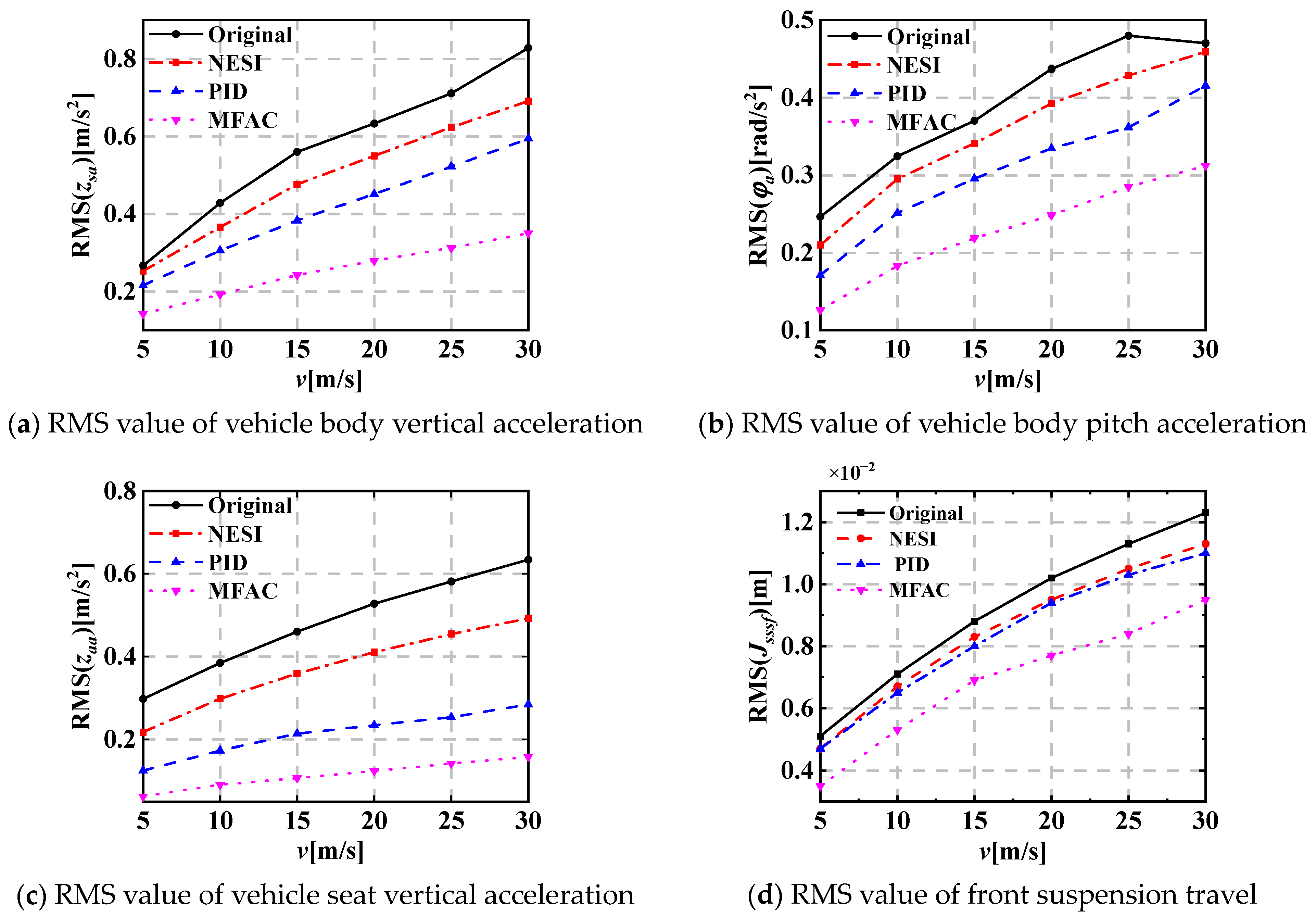
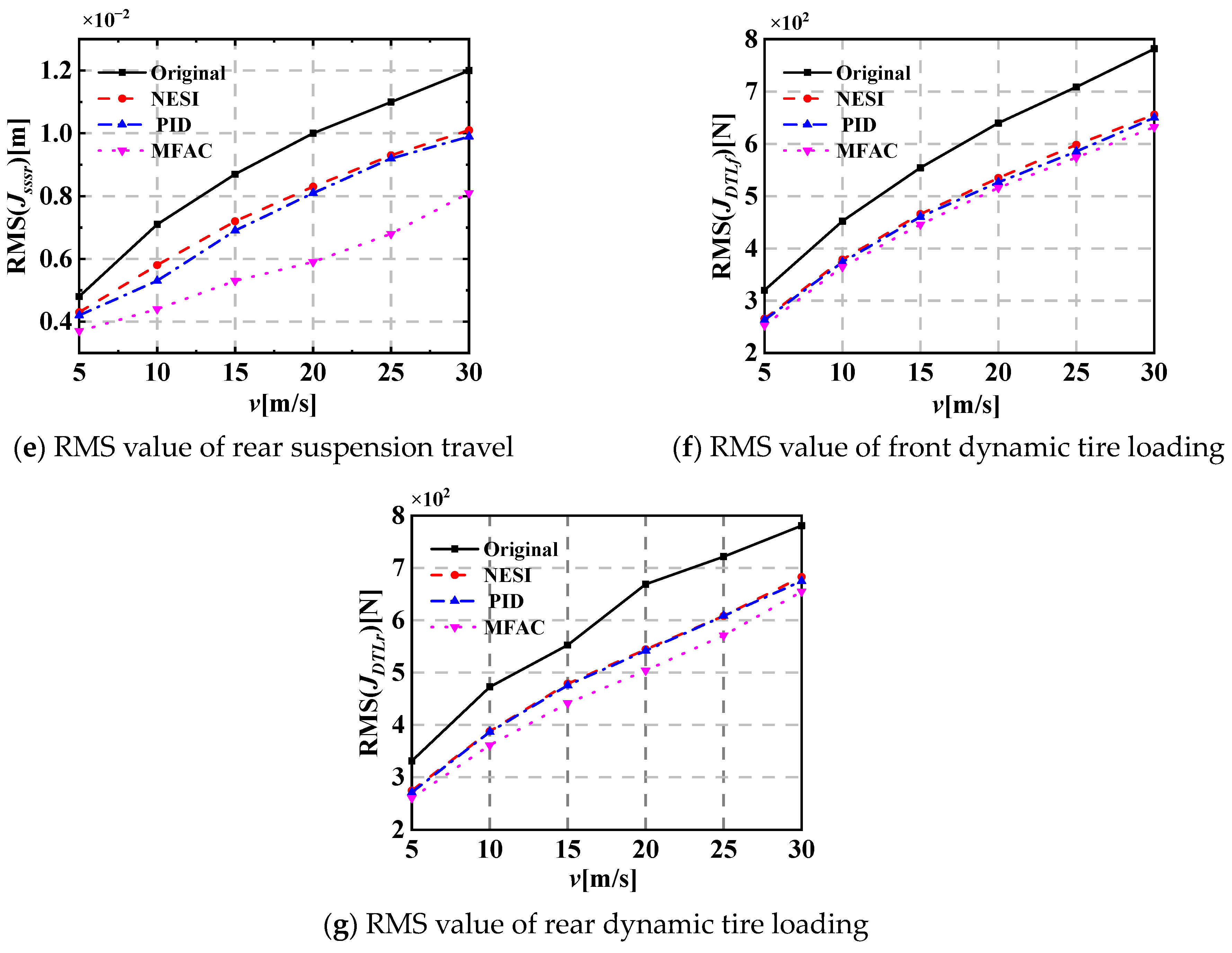
- The RMS(zsa), RMS(φa), RMS(zaa), RMS(Jsssf) and RMS(Jsssr) for the active HVS system coupled with NESI using the MFAC method under random pavement excitation are significantly smaller than those of the original HVS system, the HVS system coupled with NESI, and the active HVS system coupled with NESI using the PID control method; the RMS(JDTLf) and RMS(JDTLr) are also slightly smaller than those of the other three HVS systems, which reflects the best dynamic performance among the four HVS systems and demonstrates the effectiveness of MFAC method.
- (2)
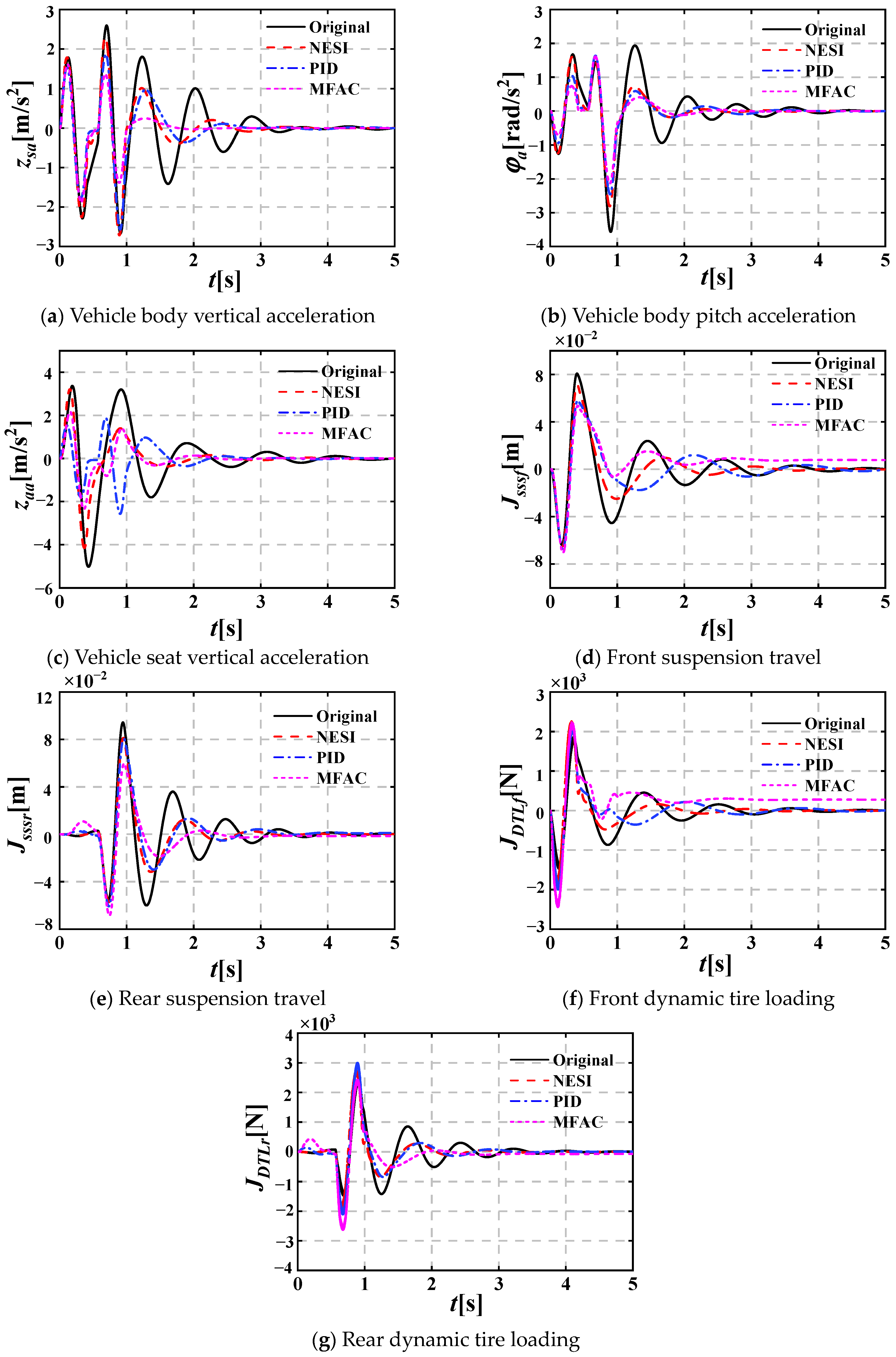
- The peak amplitudes of zsa, φa, zaa, Jsssf and Jsssr for the active HVS system coupled with NESI using the MFAC method under pavement shock excitation are smaller than those of the other three HVS systems, and the vibration attenuation time also shortens; the peak amplitudes of JDTLf and JDTLr are larger than those of the other three HVS systems, while the vibration attenuation time decreases, which also shows the benefit of the MFAC method.
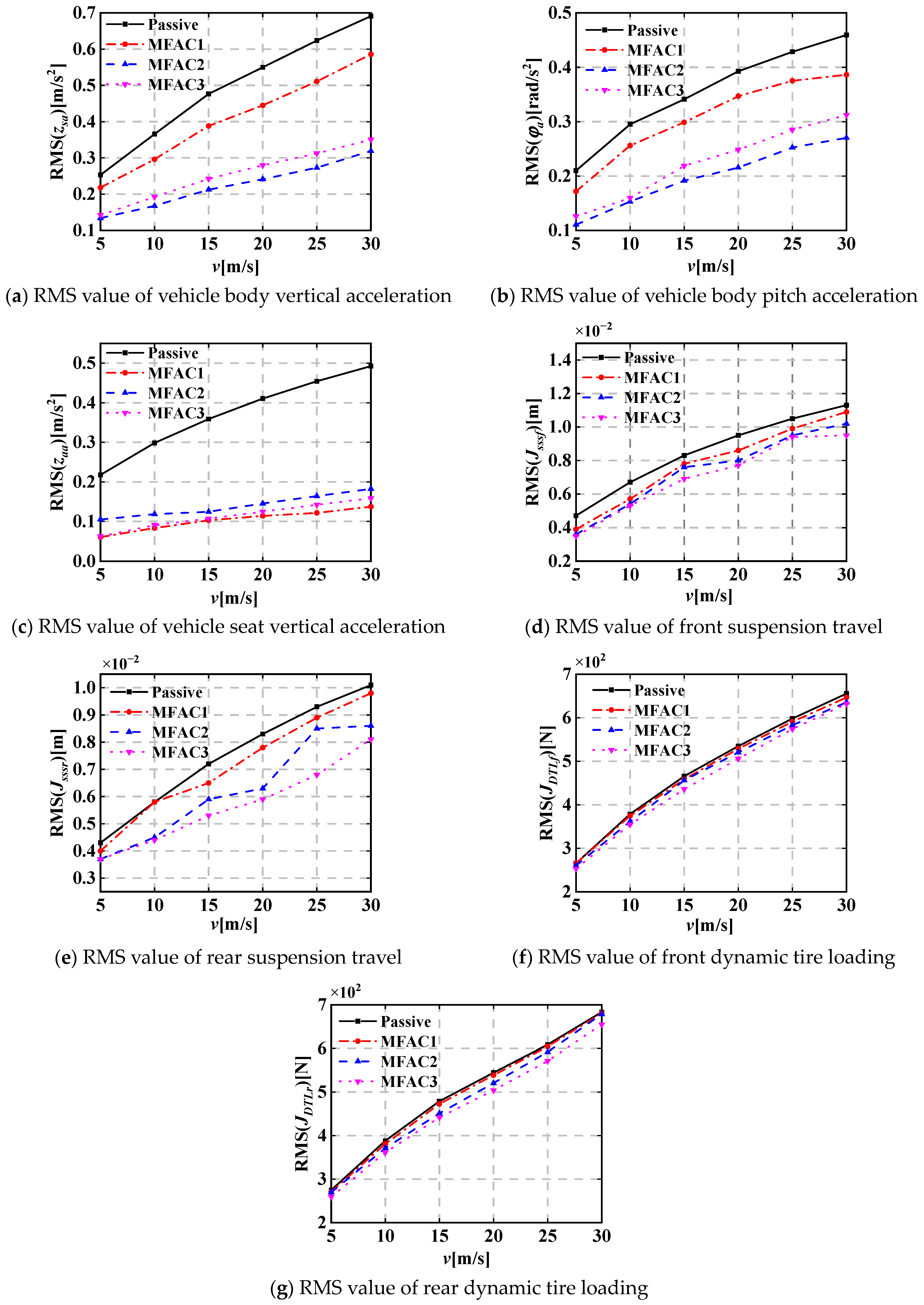
- (3)
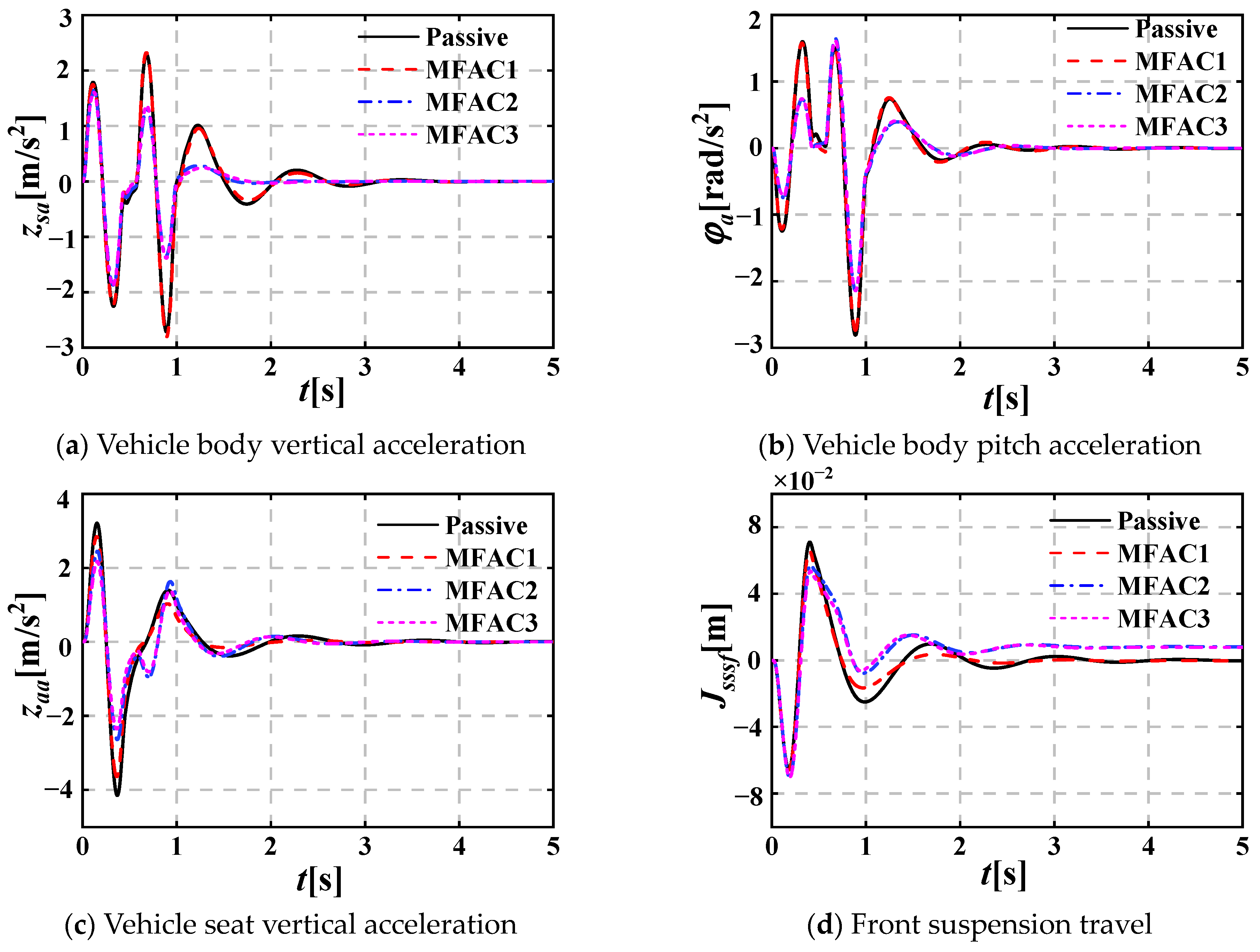
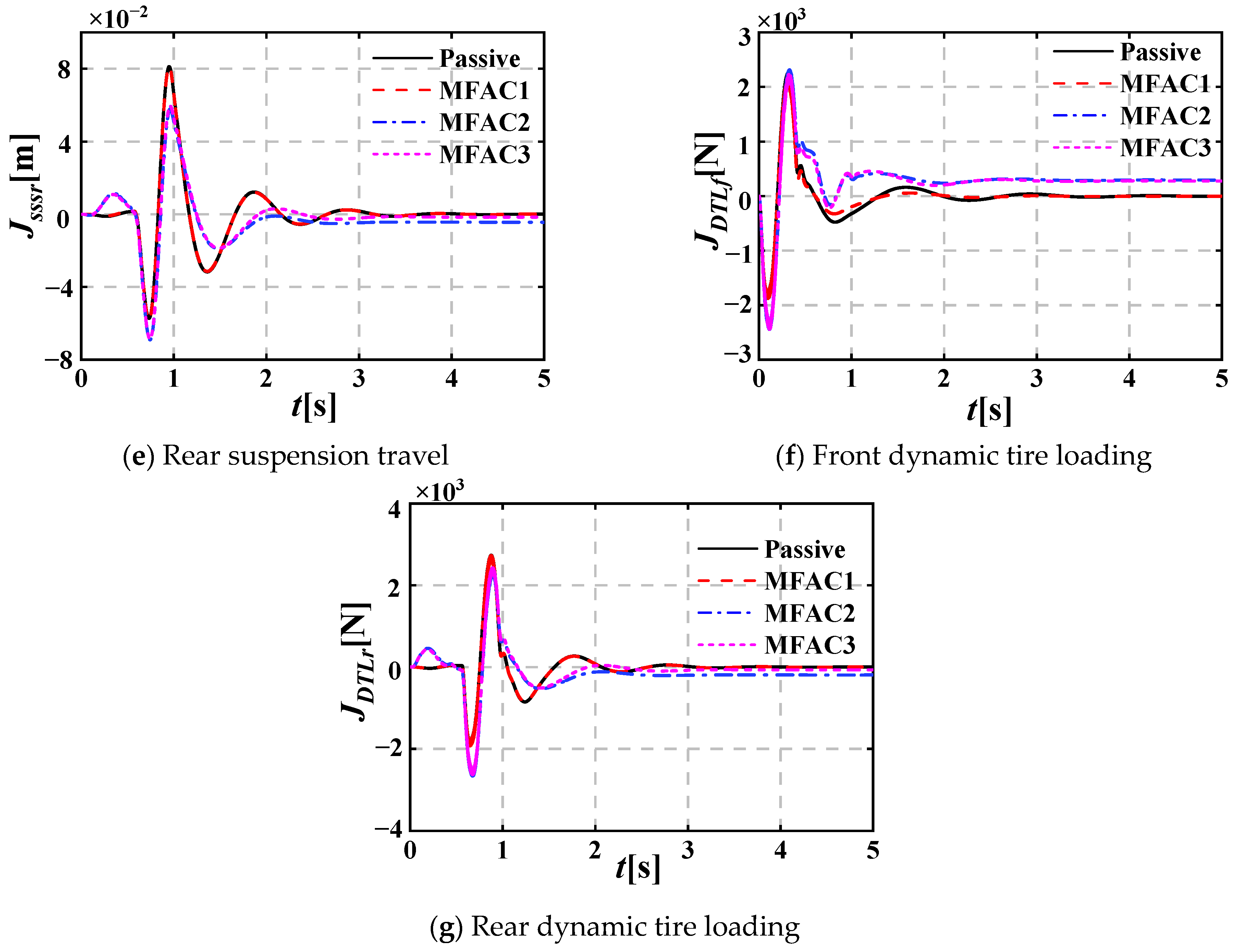
- When the MFAC is acting on both the seat and vehicle suspensions, the active HVS system obtains the best dynamic performance compared with the active HVS system where the MFAC is acting on the seat suspension, and the MFAC is acting on the front and rear suspensions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Farshidianfar, A.; Saghafi, A.; Kalami, S.M.; Saghafi, I. Active vibration isolation of machinery and sensitive equipment using H∞ control criterion and particle swarm optimization method. Meccanica 2012, 47, 437–453. [Google Scholar] [CrossRef]
- Zeng, Y.C.; Ding, H.; Du, R.H.; Chen, L.Q. A suspension system with quasi-zero stiffness characteristics and inerter nonlinear energy sink. J. Vib. Control 2022, 28, 143–158. [Google Scholar] [CrossRef]
- Ding, R.K.; Wang, R.C.; Meng, X.P.; Chen, L. Research on time-delay-dependent H∞/H2 optimal control of magnetorheological semi-active suspension with response delay. J. Vib. Control 2023, 29, 1447–1458. [Google Scholar] [CrossRef]
- Wos, P.; Dziopa, Z. Study of the vibration isolation properties of a pneumatic suspension system for the seat of a working machine with adjustable stiffness. Appl. Sci. 2024, 14, 6318. [Google Scholar] [CrossRef]
- Li, Z.L.; Hou, H.T.; Zhang, Z.; Guo, B.J.; Song, Y.; Liu, Z.Q. Analysis of vehicle ride comfort and parameter optimization of hydro-pneumatic suspension for heavy duty mining vehicle. Eng. Lett. 2024, 32, 2145–2152. [Google Scholar]
- Li, M.; Li, B.; Chen, G.; Li, H.; Ding, B.H.; Shi, C.Y.; Yu, F. Research on the design and evaluation method of vehicle seat comfort for driving experience. Int. J. Ind. Ergonom. 2024, 100, 103567. [Google Scholar] [CrossRef]
- Palomares, E.; Morales, A.L.; Nieto, A.J.; Félix, M.; Chicharro, J.M.; Pintado, P. Adaptive optimal control of pneumatic suspensions for comfort improvement of flexible railway vehicles using Monte Carlo simulations. Vehicle Syst. Dyn. 2023, 61, 2790–2810. [Google Scholar] [CrossRef]
- Kim, J.; Yim, S. Design of a suspension controller with an adaptive feedforward algorithm for ride comfort enhancement and motion sickness mitigation. Actuators 2024, 13, 315. [Google Scholar] [CrossRef]
- Zhang, S.B.; Li, M.; Li, J.S.; Xu, J.; Wang, Z.L.; Liu, S.H. Research on ride comfort control of air suspension based on genetic algorithm optimized fuzzy PID. Appl. Sci. 2024, 14, 7787. [Google Scholar] [CrossRef]
- Vakakis, A.F.; Gendelman, O.V.; Bergman, L.A.; Mojahed, A.; Gzal, M. Nonlinear targeted energy transfer: State of the art and new perspectives. Nonlinear Dynam. 2022, 108, 711–741. [Google Scholar] [CrossRef]
- Ndemanou, P.B.; Ndoukouo, N.A.; Metsebo, J.; Kol, G.R. Nonlinear energy sink response of a cylindrical storage tank under earthquake loads. Soil Dyn. Earthq. Eng. 2024, 179, 108536. [Google Scholar] [CrossRef]
- Geng, X.F.; Ding, H.; Jin, C.J.; Wei, K.X.; Jing, X.J.; Chen, L.Q. A state-of-the-art review on the dynamic design of nonlinear energy sinks. Eng. Struct. 2024, 313, 118228. [Google Scholar] [CrossRef]
- Wang, J.; Zheng, Y.; Ma, Y. Movable-track nonlinear energy sinks with customizable restoring forces. Mech. Syst. Signal Process. 2025, 224, 112078. [Google Scholar] [CrossRef]
- Huang, C.; Zheng, G.; Nie, X.; Yang, G. Supercritical and subcritical aeroelastic behaviors of a three-dimensional wing coupled with a nonlinear energy sink. Int. J. Nonlin. Mech. 2024, 161, 104692. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, T.; Bian, H.Y.; Yin, Y.; Wei, X.H. Shimmy performance analysis and parameter optimization of a dual-wheel nose landing gear coupled with torsional nonlinear energy sink and considering structural nonlinear factor. Chaos Soliton Fract. 2024, 187, 115330. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, T.; Yin, Y.; Wei, X.H. Reducing shimmy oscillation of a dual-wheel nose landing gear based on torsional nonlinear energy sink. Nonlinear Dynam. 2024, 112, 4027–4062. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, P.L.; Meng, H.D.; Chen, L.Q. Dynamic performance and parameter optimization of a half-vehicle system coupled with an inerter-based X-structure nonlinear energy sink. Appl. Math-Engl. 2024, 45, 85–110. [Google Scholar] [CrossRef]
- Zhang, X.L.; Cheng, X.B.; Liu, J.C.; Yang, J.X.; Nie, J.M. Load adaptivity of seat suspensions equipped with diamond-shaped structure mem-inerter. J. Vib. Eng. Technol. 2024. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, B.B.; Meng, H.D. Enhanced vehicle shimmy performance using inerter-based suppression mechanism. Commun. Nonlinear Sci. 2024, 130, 107800. [Google Scholar] [CrossRef]
- Smith, M.C. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Contr. 2002, 47, 1648–1662. [Google Scholar] [CrossRef]
- Zhang, Y.W.; Lu, Y.N.; Zhang, W.; Teng, Y.Y.; Yang, H.X.; Yang, T.Z.; Chen, L.Q. Nonlinear energy sink with inerter. Mech. Syst. Signal Process. 2019, 125, 52–64. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Z.; Ding, H.; Chen, L.Q. An inertial nonlinear energy sink. J. Sound Vib. 2019, 405, 34–47. [Google Scholar] [CrossRef]
- Javidialesaadi, A.; Wierschem, N. An inerter-enhanced nonlinear energy sink. Mech. Syst. Signal Process. 2019, 129, 449–454. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Z.; Dou, J.; Jia, R.; Yao, H. An inerter nonlinear energy sink for torsional vibration suppression of the rotor system. J. Sound Vib. 2022, 537, 117184. [Google Scholar] [CrossRef]
- Sui, P.; Shen, Y.J.; Wang, X. Study on response mechanism of nonlinear energy sink with inerter and grounded stiffness. Nonlinear Dynam. 2023, 111, 7157–7179. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, B.B.; Dai, J.G.; Chen, L.Q. Enhanced dynamic performance of a half-vehicle system using inerter-based nonlinear energy sink. J. Vib. Control 2024, 30, 2857–2880. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Ren, C.L.; Meng, H.D.; Wang, Y. Dynamic characteristic analysis of a half-vehicle seat system integrated with nonlinear energy sink inerters (NESIs). Appl. Sci. 2023, 13, 12468. [Google Scholar] [CrossRef]
- Du, H.; Li, W.; Zhang, N. Integrated seat and suspension control for a quarter vehicle with driver model. IEEE Trans. Veh. Technol. 2012, 61, 3893–3908. [Google Scholar]
- Lathkar, M.; Shendge, P.; Phadke, S. Active control of uncertain seat suspension system based on a state and disturbance observer. IEEE Trans.Syst. ManCybern. Syst. 2020, 50, 840–850. [Google Scholar] [CrossRef]
- Han, S.; Dong, J.; Zhou, J.; Chen, Y. Adaptive fuzzy PID control strategy for vehicle active suspension based on road evaluation. Electronics 2022, 11, 921. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE Trans. Neural Netw. 2011, 22, 2173–2188. [Google Scholar] [PubMed]
- Milad, M.; Ioannis, P.; Markos, P. Internal boundary control of lane-free automated vehicle traffic using a model-free adaptive controller. IFAC-PapersOnLine 2021, 54, 99–106. [Google Scholar]
- Peláez, G.; Alonso, C.; Rubio, H.; Prada, J. Performance analysis of input shaped model reference adaptive control for a single-link flexible manipulator. J. Vib. Control 2024, 30, 5018–5030. [Google Scholar] [CrossRef]
- Mohammed, A.A.O.; Peng, L.; Hamid, A.H.G.; Ishag, A.M. Disturbance observer-based-model-free adaptive fuzzy fractional-order prescribed performance control for nonlinear PEMFC system with uncertainties and performance constraints. Int. J. Fuzzy Syst. 2024, 1–20. [Google Scholar] [CrossRef]
- Gu, C.; Tan, C.; Li, B.; Lu, J.; Wang, G.; Chi, X. Data-driven model-free adaptive sliding mode control for electromagnetic linear actuator. J. Micromech. Microeng. 2022, 32, 055007. [Google Scholar] [CrossRef]
- Du, H.; Zhang, N. Constrained H∞ control of active suspension for a half-vehicle model with a time delay in control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 665–684. [Google Scholar] [CrossRef]
- Zhang, Y.; Ren, C.; Ma, K.; Xu, Z.; Zhou, P.; Chen, Y. Effect of delayed resonator on the vibration reduction performance of vehicle active seat suspension. J. Low Freq. Noise Vib. Act. Control 2022, 41, 387–404. [Google Scholar] [CrossRef]
- Wu, K.; Ren, C.; Nan, Y.; Li, L.; Yuan, S.; Shao, S.; Sun, Z. Experimental research on vehicle active suspension based on time-delay control. Int. J. Control 2024, 5, 1157–1173. [Google Scholar] [CrossRef]
- Mohsen, H.; Shahin, D.; Basohbat, A.; Roshanian, J. On the performance of the model-free adaptive control for a novel moving-mass controlled flying robot. J. Intell. Robot Syst. 2024, 110, 79. [Google Scholar]
- Hou, Z.S.; Xiong, S.S. On model-free adaptive control and its stability analysis. IEEE Trans. Autom. Contr. 2019, 64, 4555–4569. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, J.; Lu, X.; Li, C.; Malik, O. Model-free adaptive optimal control for fast and safe start-up of pumped storage hydropower units. J. Energy Storage 2024, 87, 111345. [Google Scholar] [CrossRef]
- Li, Z.Y.; Cai, S.L.; Li, X.Q.; Shao, S.Y.; Yang, X.Y. Fault diagnosis of rolling bearing for motor based on LSTM-EEMD and genetic optimization. J. Phys. Conf. Ser. 2023, 2549, 012025. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 690 kg | 800 Ns/m | 1.4 m | |||
| 1222 kgm2 | 2 × 105 N/m | 1.5 m | |||
| 45 kg | 2 × 105 N/m | 1000 Ns/m | |||
| 45 kg | 18,000 N/m | 1000 Ns/m | |||
| 80 kg | 22,000 N/m | ||||
| 8000 N/m | 1.3 m |
| Variable | Upper Limit | Lower Limit |
|---|---|---|
| 0 | 30 | |
| 0 | 30 | |
| 0 | 30 | |
| 0 | 20 | |
| 0 | 20 | |
| 0 | 20 |
| Speed | Indicators | Original | NESI | PID | MFAC |
|---|---|---|---|---|---|
| 5 m/s | RMS(zsa) | 0.2668 m/s2 | 0.2531 m/s2 | 0.2157 m/s2 | 0.1424 m/s2 |
| RMS() | 0.2464 rad/s2 | 0.2099 rad/s2 | 0.1711 rad/s2 | 0.1261 rad/s2 | |
| RMS(zaa) | 0.2977 m/s2 | 0.2174 m/s2 | 0.1252 m/s2 | 0.0629 m/s2 | |
| RMS(Jsssf) | 0.0051 m | 0.0047 m | 0.0047 m | 0.0035 m | |
| RMS(Jsssr) | 0.0048 m | 0.0043 m | 0.0042 m | 0.0037 m | |
| RMS(JDTLf) | 320.0783 N | 265.4598 N | 263.0662 N | 253.0396 N | |
| RMS(JDTLr) | 331.3083 N | 274.6861 N | 271.1194 N | 259.0869 N | |
| 10 m/s | RMS(zsa) | 0.4284 m/s2 | 0.3658 m/s2 | 0.3056 m/s2 | 0.1925 m/s2 |
| RMS() | 0.3246 rad/s2 | 0.2951 rad/s2 | 0.2512 rad/s2 | 0.1831 rad/s2 | |
| RMS(zaa) | 0.3844 m/s2 | 0.2982 m/s2 | 0.1732 m/s2 | 0.0909 m/s2 | |
| RMS(Jsssf) | 0.0071 m | 0.0067 m | 0.0065 m | 0.0053 m | |
| RMS(Jsssr) | 0.0071 m | 0.0058 m | 0.0053 m | 0.0044 m | |
| RMS(JDTLf) | 452.0866 N | 378.6121 N | 373.8854 N | 354.6754 N | |
| RMS(JDTLr) | 472.6359 N | 387.9935 N | 386.5476 N | 361.2199 N | |
| 15 m/s | RMS(zsa) | 0.5600 m/s2 | 0.4765 m/s2 | 0.3831 m/s2 | 0.2425 m/s2 |
| RMS() | 0.3702 rad/s2 | 0.3411 rad/s2 | 0.2956 rad/s2 | 0.2187 rad/s2 | |
| RMS(zaa) | 0.4603 m/s2 | 0.3588 m/s2 | 0.2137 m/s2 | 0.1071 m/s2 | |
| RMS(Jsssf) | 0.0088 m | 0.0083 m | 0.0080 m | 0.0069 m | |
| RMS(Jsssr) | 0.0087 m | 0.0072 m | 0.0069 m | 0.0053 m | |
| RMS(JDTLf) | 554.0991 N | 465.7717 N | 460.4525 N | 435.7612 N | |
| RMS(JDTLr) | 552.5659 N | 478.8739 N | 475.7574 N | 441.6093 N | |
| 20 m/s | RMS(zsa) | 0.6332 m/s2 | 0.5498 m/s2 | 0.4515 m/s2 | 0.2796 m/s2 |
| RMS() | 0.4368 rad/s2 | 0.3926 rad/s2 | 0.3345 rad/s2 | 0.2484 rad/s2 | |
| RMS(zaa) | 0.5278 m/s2 | 0.4105 m/s2 | 0.2341 m/s2 | 0.1245 m/s2 | |
| RMS(Jsssf) | 0.0102 m | 0.0095 m | 0.0094 m | 0.0077 m | |
| RMS(Jsssr) | 0.0100 m | 0.0083 m | 0.0081 m | 0.0059 m | |
| RMS(JDTLf) | 639.6182 N | 534.7238 N | 526.4452 N | 505.9133 N | |
| RMS(JDTLr) | 669.1567 N | 544.4752 N | 541.7558 N | 504.0269 N | |
| 25 m/s | RMS(zsa) | 0.7112 m/s2 | 0.6236 m/s2 | 0.5219 m/s2 | 0.3126 m/s2 |
| RMS() | 0.4798 rad/s2 | 0.4285 rad/s2 | 0.3617 rad/s2 | 0.2851 rad/s2 | |
| RMS(zaa) | 0.5814 m/s2 | 0.4542 m/s2 | 0.2535 m/s2 | 0.1421 m/s2 | |
| RMS(Jsssf) | 0.0113 m | 0.0105 m | 0.0103 m | 0.0094 m | |
| RMS(Jsssr) | 0.0110 m | 0.0093 m | 0.0092 m | 0.0068 m | |
| RMS(JDTLf) | 708.4648 N | 598.0734 N | 585.2245 N | 573.9021 N | |
| RMS(JDTLr) | 721.6675 N | 608.4276 N | 608.3457 N | 571.1349 N | |
| 30 m/s | RMS(zsa) | 0.8282 m/s2 | 0.6911 m/s2 | 0.5945 m/s2 | 0.3504 m/s2 |
| RMS() | 0.4702 rad/s2 | 0.4592 rad/s2 | 0.4156 rad/s2 | 0.3122 rad/s2 | |
| RMS(zaa) | 0.6341 m/s2 | 0.4925 m/s2 | 0.2841 m/s2 | 0.1584 m/s2 | |
| RMS(Jsssf) | 0.0123 m | 0.0113 m | 0.0110 m | 0.0095 m | |
| RMS(Jsssr) | 0.0120 m | 0.0101 m | 0.0099 m | 0.0081 m | |
| RMS(JDTLf) | 781.7247 N | 655.6325 N | 650.1521 N | 631.9343 N | |
| RMS(JDTLr) | 780.9716 N | 683.0428 N | 675.1251 N | 654.8734 N |
| Speed | Indicators | Passive | MFAC1 | MFAC2 | MFAC3 |
|---|---|---|---|---|---|
| 5 m/s | RMS(zsa) | 0.2531 m/s2 | 0.2182 m/s2 | 0.1342 m/s2 | 0.1424 m/s2 |
| RMS() | 0.2099 rad/s2 | 0.1718 rad/s2 | 0.1105 rad/s2 | 0.1261 rad/s2 | |
| RMS(zaa) | 0.2174 m/s2 | 0.0609 m/s2 | 0.1047 m/s2 | 0.0629 m/s2 | |
| RMS(Jsssf) | 0.0047 m | 0.0039 m | 0.0036 m | 0.0035 m | |
| RMS(Jsssr) | 0.0043 m | 0.0040 m | 0.0037 m | 0.0037 m | |
| RMS(JDTLf) | 265.4598 N | 265.3441 N | 260.3031 N | 253.0396 N | |
| RMS(JDTLr) | 274.6861 N | 271.1274 N | 269.7326 N | 259.0869 N | |
| 10 m/s | RMS(zsa) | 0.3658 m/s2 | 0.2962 m/s2 | 0.1678 m/s2 | 0.1925 m/s2 |
| RMS() | 0.2951 rad/s2 | 0.2560 rad/s2 | 0.1531 rad/s2 | 0.1597 rad/s2 | |
| RMS(zaa) | 0.2982 m/s2 | 0.0837 m/s2 | 0. 1184 m/s2 | 0.0909 m/s2 | |
| RMS(Jsssf) | 0.0067 m | 0.0057 m | 0.0054 m | 0.0053 m | |
| RMS(Jsssr) | 0.0058 m | 0.0058 m | 0.0045 m | 0.0044 m | |
| RMS(JDTLf) | 378.6121 N | 374.6261 N | 361.5634 N | 354.6754 N | |
| RMS(JDTLr) | 387.9935 N | 380.8379 N | 371.0558 N | 361.2199 N | |
| 15 m/s | RMS(zsa) | 0.4765 m/s2 | 0.3881 m/s2 | 0.2125 m/s2 | 0.2425 m/s2 |
| RMS() | 0.3411 rad/s2 | 0.2988 rad/s2 | 0.1915 rad/s2 | 0.2187 rad/s2 | |
| RMS(zaa) | 0.3588 m/s2 | 0.1027 m/s2 | 0.1244 m/s2 | 0.1071 m/s2 | |
| RMS(Jsssf) | 0.0083 m | 0.0078 m | 0.0076 m | 0.0069 m | |
| RMS(Jsssr) | 0.0072 m | 0.0065 m | 0.0059 m | 0.0053 m | |
| RMS(JDTLf) | 465.7717 N | 458.5251 N | 456.0713 N | 435.7612 N | |
| RMS(JDTLr) | 478.8739 N | 472.7714 N | 451.0862 N | 441.6093 N | |
| 20 m/s | RMS(zsa) | 0.5498 m/s2 | 0.4450 m/s2 | 0.2413 m/s2 | 0.2796 m/s2 |
| RMS() | 0.3926 rad/s2 | 0.3469 rad/s2 | 0.2156 rad/s2 | 0.2484 rad/s2 | |
| RMS(zaa) | 0.4105 m/s2 | 0.1139 m/s2 | 0.1454 m/s2 | 0.1245 m/s2 | |
| RMS(Jsssf) | 0.0095 m | 0.0086 m | 0.0080 m | 0.0077 m | |
| RMS(Jsssr) | 0.0083 m | 0.0078 m | 0.0063 m | 0.0059 m | |
| RMS(JDTLf) | 534.7238 N | 528.9467 N | 520.3906 N | 505.9133 N | |
| RMS(JDTLr) | 544.4752 N | 538.6432 N | 520.6340 N | 504.0269 N | |
| 25 m/s | RMS(zsa) | 0.6236 m/s2 | 0.5110 m/s2 | 0.2732 m/s2 | 0.3126 m/s2 |
| RMS() | 0.4285 rad/s2 | 0.3752 rad/s2 | 0.2524 rad/s2 | 0.2851 rad/s2 | |
| RMS(zaa) | 0.4542 m/s2 | 0.1216 m/s2 | 0.1641 m/s2 | 0.1421 m/s2 | |
| RMS(Jsssf) | 0.0105 m | 0.0099 m | 0.0095 m | 0.0094 m | |
| RMS(Jsssr) | 0.0093 m | 0.0089 m | 0.0085 m | 0.0068 m | |
| RMS(JDTLf) | 598.0734 N | 590.9013 N | 582.9449 N | 573.9021 N | |
| RMS(JDTLr) | 608.4276 N | 604.3024 N | 591.6629 N | 571.1349 N | |
| 30 m/s | RMS(zsa) | 0.6911 m/s2 | 0.5857 m/s2 | 0.3192 m/s2 | 0.3504 m/s2 |
| RMS() | 0.4592 rad/s2 | 0.3862 rad/s2 | 0.2703 rad/s2 | 0.3122 rad/s2 | |
| RMS(zaa) | 0.4925 m/s2 | 0.1372 m/s2 | 0.1823 m/s2 | 0.1584 m/s2 | |
| RMS(Jsssf) | 0.0113 m | 0.0109 m | 0.0102 m | 0.0095 m | |
| RMS(Jsssr) | 0.0101 m | 0.0098 m | 0.0086 m | 0.0081 m | |
| RMS(JDTLf) | 655.6325 N | 646.6703 N | 635.3834 N | 631.9343 N | |
| RMS(JDTLr) | 683.0428 N | 680.5100 N | 678.4872 N | 654.8734 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Ren, C.; Meng, H.; Wang, Y. Model-Free Adaptive Control of an Active Half-Vehicle-Seat System Coupled with a Nonlinear Energy Sink Inerter (NESI). Appl. Sci. 2024, 14, 11239. https://doi.org/10.3390/app142311239
Zhang Y, Ren C, Meng H, Wang Y. Model-Free Adaptive Control of an Active Half-Vehicle-Seat System Coupled with a Nonlinear Energy Sink Inerter (NESI). Applied Sciences. 2024; 14(23):11239. https://doi.org/10.3390/app142311239
Chicago/Turabian StyleZhang, Yuanyuan, Chunling Ren, Haodong Meng, and Yong Wang. 2024. "Model-Free Adaptive Control of an Active Half-Vehicle-Seat System Coupled with a Nonlinear Energy Sink Inerter (NESI)" Applied Sciences 14, no. 23: 11239. https://doi.org/10.3390/app142311239
APA StyleZhang, Y., Ren, C., Meng, H., & Wang, Y. (2024). Model-Free Adaptive Control of an Active Half-Vehicle-Seat System Coupled with a Nonlinear Energy Sink Inerter (NESI). Applied Sciences, 14(23), 11239. https://doi.org/10.3390/app142311239