1. Introduction
The most important parameters that has to be known in any machining are the cutting forces that develop in all three directions of a spatial orthogonal system. In the case of milling, the force values for all three directions are essential for analyzing, controlling, and optimizing the milling process. Taking into account the dynamics of the milling process and machining conditions, determining these values is often difficult. The determination of the force values can be achieved either theoretically, based on computational relationships, or experimentally, by measuring them directly. The analytical relationships that provide the values of the forces that appear in the milling process are based on the use of experimentally obtained coefficients. In essence, the experimental component is fundamental in the determination of cutting forces.
The direct determination of cutting forces using measurements can be achieved by means of specialized devices called dynamometers. Over time, different types of dynamometers have been developed that use strain gauges for deformation measurements [
1,
2,
3,
4,
5,
6], or rotating dynamometers [
7,
8] have been applied as integrated systems on tool holders for the milling process.
The most frequently used dynamometers are made with strain gauge or piezoelectric sensors, but there are some other indirect methods such as those from the feed drivers of spindle or from machine tool vibrations. The direct methods are mainly used to measure, with high precision, the forces, while the indirect methods are used in process monitoring applications.
In practice, the best result can be obtained by using a flexural mechanism [
9,
10,
11,
12,
13]. Flexural mechanisms offer some real advantages such as a simple design and assembly, low cost of manufacturing, monolithic structure, linear relationship between the applied force and displacement for small distortions, and continuous and smooth displacement characteristics.
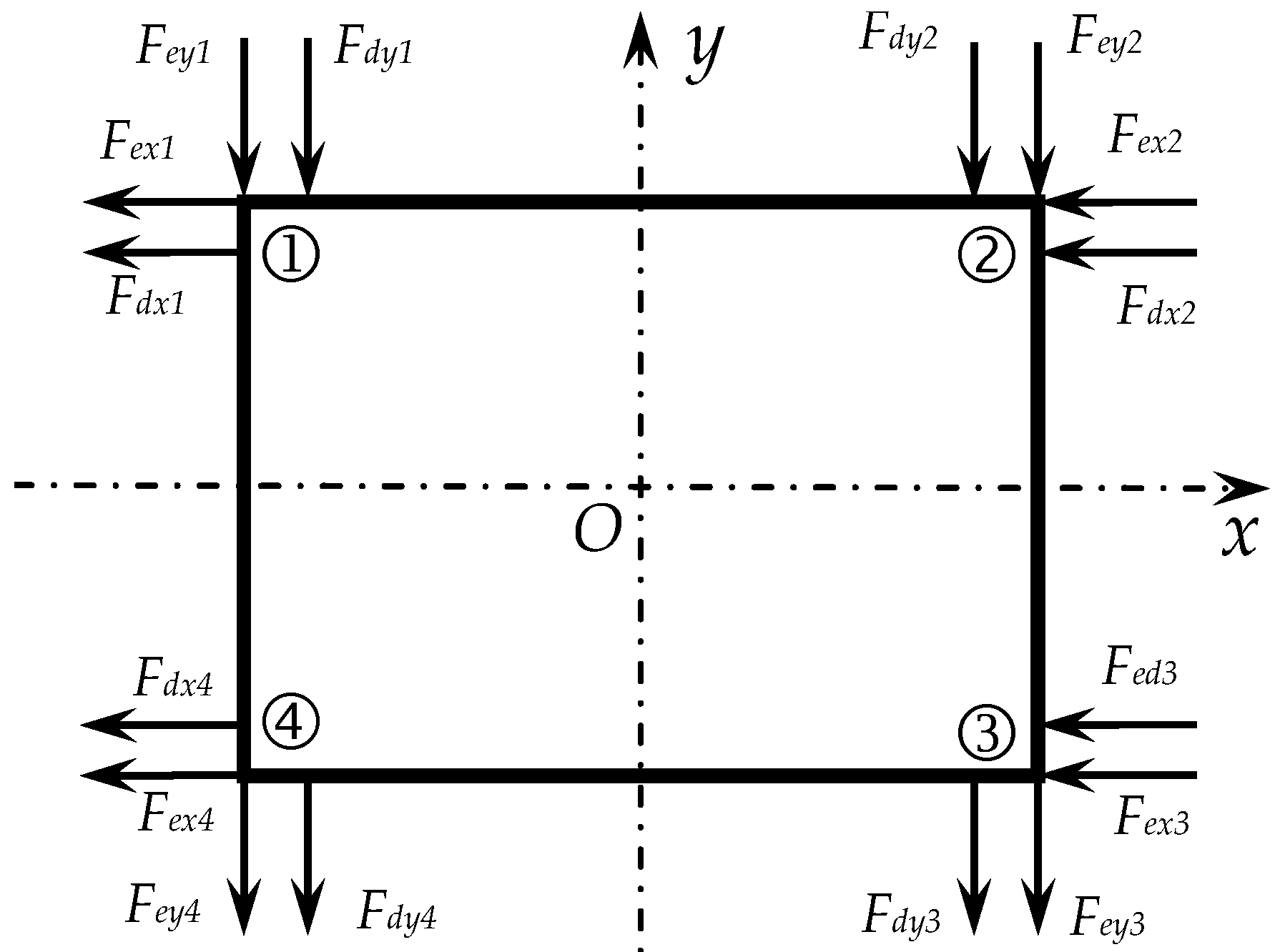
A dynamometer that is used to determine milling forces consists of two flat plates linked together by four octagonal rings in a symmetrical structure. The workpiece is placed on the upper plate. The bottom plate is fixed to the table of the milling machine. Elastic rings are subjected to forces that are monitored and summed accordingly. The forces that develop along the three directions can be obtained in this way.
Generally, dynamometers can be divided, from the point of view of their production, into two classes: commercial devices, produced by renowned companies in the field and used for general industrial processes, and laboratory devices, designed and manufactured for certain experiments, which assume certain particularities that must be taken into account.
In the case of commercial dynamometers, they are made of a set of piezoelectric sensors that are arranged to measure the machining forces and/or torque. The laboratory dynamometers are made with either strain gauges or piezoelectric sensors. Due their high sensitivity and rigidity, piezoelectric ones are preferred. The usage of strain gauges is based on Hooke’s law, which takes into consideration the relations between the elastic strain, stress, and associated force.
The dynamometers with strain gauges involve some disadvantages, such as the following:
They have a complicated measurement structure: the strain gauges must be connected in an electrical circuit (measuring bridge), which must be balanced and calibrated;
The deformation–electrical resistance relationship is more nonlinear;
They are fragile and difficult to mount on curved surfaces;
The maximum deflection that can be measured is an order of magnitude smaller (typically, less than 0.01 m/m);
They have temperature sensitivity.
In the case of using of piezoelectric crystals, a very good compromise is obtained between the stiffness and sensitivity, and as a result, piezoelectric dynamometers are widely used. Regardless of the type of dynamometer used, it must meet a number of conditions, such as the following [
14]:
Sensitivity, expressed by the accuracy of the measured data;
Stiffness, which means that the dynamometer has to be able to withstand the forces without causing much deflection, which may affect the machining condition;
Cross sensitivity, such that one force does not affect the measurement of the other forces;
Quick response time;
High-frequency response such that the readings are not affected by vibrations within a reasonably high range of frequency;
Stability against humidity and temperature;
Increased maneuverability.
The dynamometers are mounted on the machine table and are aligned with the feed direction. In applications, the workpiece must be limited in its dimensions and mass, because a large mass strongly influences the dynamic response of the dynamometer. Using force transducers, an important goal is achieved: measuring, at the same time, the force signal magnitude of the force and frequency content.
Regardless of the method used, in addition to the maximum value of cutting force that can be measured, another characteristic to watch for is the frequency range in which these forces occur. This is closely related to the analyses that can be performed on the milling process in both domains: the time domain and frequency domain.
Therefore, dynamometers must ensure that measurements can be made both in the time range and in the frequency range over as wide of a range as possible for the amplitude of forces, encompassing the frequencies of vibrations resulting from the milling process.
In the present paper, a dynamometer design based on octagonal-ring elastic elements and force transducers produced by the company Brüel & Kjær (Virum, Denmark) is presented. The basic structure of the dynamometer is the classic one, but the strain gauges used for the deflection measurements are replaced with calibrated force transducers. Thus, the values of the dynamic forces in the three directions and their associated frequencies can be determined. At the same time, static and dynamic calibrations and a study of the dynamic behavior are conducted. The use of such systems is important in current practice for the study of various aspects involved in technological processes. An important advantage is the fact that the use of calibrated force transducers produced by different companies offers the possibility to connect them to any data acquisition platform while considering their sensitivity characteristics. At the same time, using the direct frequency analysis, offered by soft applications tied with acquisition platforms, permits the damping ratio and transmissibility rate to be found.
The aim of this study is to create a model to study the dynamic behavior of the considered dynamometer with force transducers. The stiffness of the rings is found using three different methods: analytic, experimental, and using the FEM. Based on these characteristics and considering the damping coefficient found in a previous paper [
9], it is described as a three-degrees-of-freedom model.
2. Materials and Methods
The dynamometer shown in
Figure 1, made of two plates defined as the upper plate and bottom plate and four rings, was considered.
The geometry and design data of the dynamometer components are shown in
Figure 2, where the dimensions are given in mm.
The accuracy of the measurements made is dependent on the static and dynamic calibrations of the dynamometer. The cutting force value recorded by the force transducers can be distorted by the dynamic parameters of the dynamometer, inertia and stiffness, and the workpiece structures. For a correct measurement of the forces and frequencies, the dynamometer is excited with known harmonic forces at different frequencies in the two directions. For this, an electrodynamic exciter is used, and the input/output transmissibility ratio can be determined.
The static calibration refers to the elastic deflection of the ring components and, consequently, the value of stiffness, while the dynamic calibration refers to the dynamic response of the dynamometer: in the present case, the frequency bandwidth and dynamic force magnitude.
For force determination, force transducers were used; four force transducers made by Brüel & Kjær, type 8230-003, were mounted on the rings (
Figure 3a); at one end, they were fixed to the rings, and at the other end, they were locked by means of stops embedded in the bottom plate (
Figure 3b). The main characteristics of the used force transducers are presented in
Table 1 [
15].
6. Conclusions
The values for ring stiffness were found for the two directions of deformation: longitudinal and transverse. These values were determined using three different methods: analytically, by using relations from references, through experiments, and with the finite element method, using the facilities offered by the program ANSYS. There was a very good correlation between the values determined using the three methods. As a result, an average value was considered between the three values found. Damping forces were also considered as the values of the damping coefficient, using the data presented in a previous paper [
21].
Considering the d’Alembert principle, we found the motion equation expressed by (12) and in matrix form, as expressed by (13). Using the property of the evolution matrix A from the state-space approach, we found the natural frequencies of the dynamometer when considered as a lumped mass system.
The results of the research carried out using the three methods highlight the fact that there are two identical values of natural frequencies (corresponding to longitudinal and transverse movements) and a frequency corresponding to twisting. It was proven that there is a good correlation between the results obtained using the lumped model and the results obtained using the FEM.
The present study offers a model of a milling dynamometer used to evaluate its natural frequencies that can help in defining the next steps of future studies of milling and allows for the avoidance of resonances. The obtained results can be extended for other sizes of dynamometers. Their behaviors will be similar to the behavior of the studied dynamometer from a qualitative point of view, but the values obtained will be different, in accordance with the dimensions used for the respective case.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}