The Crazyflie 2.1 is a 27 g commercial NAV that is limited to a 15 g payload. The NAV has a LiPo battery that provides power for up to 7 min of continuous flight and charges for 40 min. The Crazyflie 2.1 has four DC motors and plastic propellers to attach the motors to the NAV. The two most essential components of the Crazyflie are the microprocessors, the STM32F4 and the nRF51822. The main microcontroller (STM32F4) is a 32-bit ARM Cortex-M4 embedded processor that handles Crazyflie’s main firmware with all low-level and high-level controls. The nRF51822 handles all radio communications and power management and communicates with the ground station. The IMU described above is onboard the NAV. Sensors provide measurements to stabilise the NAV’s flight. The expansion ports directly access buses such as UART, I2C, and SPI.
3.1.1. Schematic
To develop the schematic for the NAB, we began by studying the schematic of the Crazyflie 2.1 and its component functions. Next, we checked the hardware available on the market. Since most elements were out of stock, we had to search for alternative materials with the same characteristics. After performing the aforementioned steps, we designed the schematic for the NAB using the selected elements.
We divided the developed schematic into blocks for easier understanding.
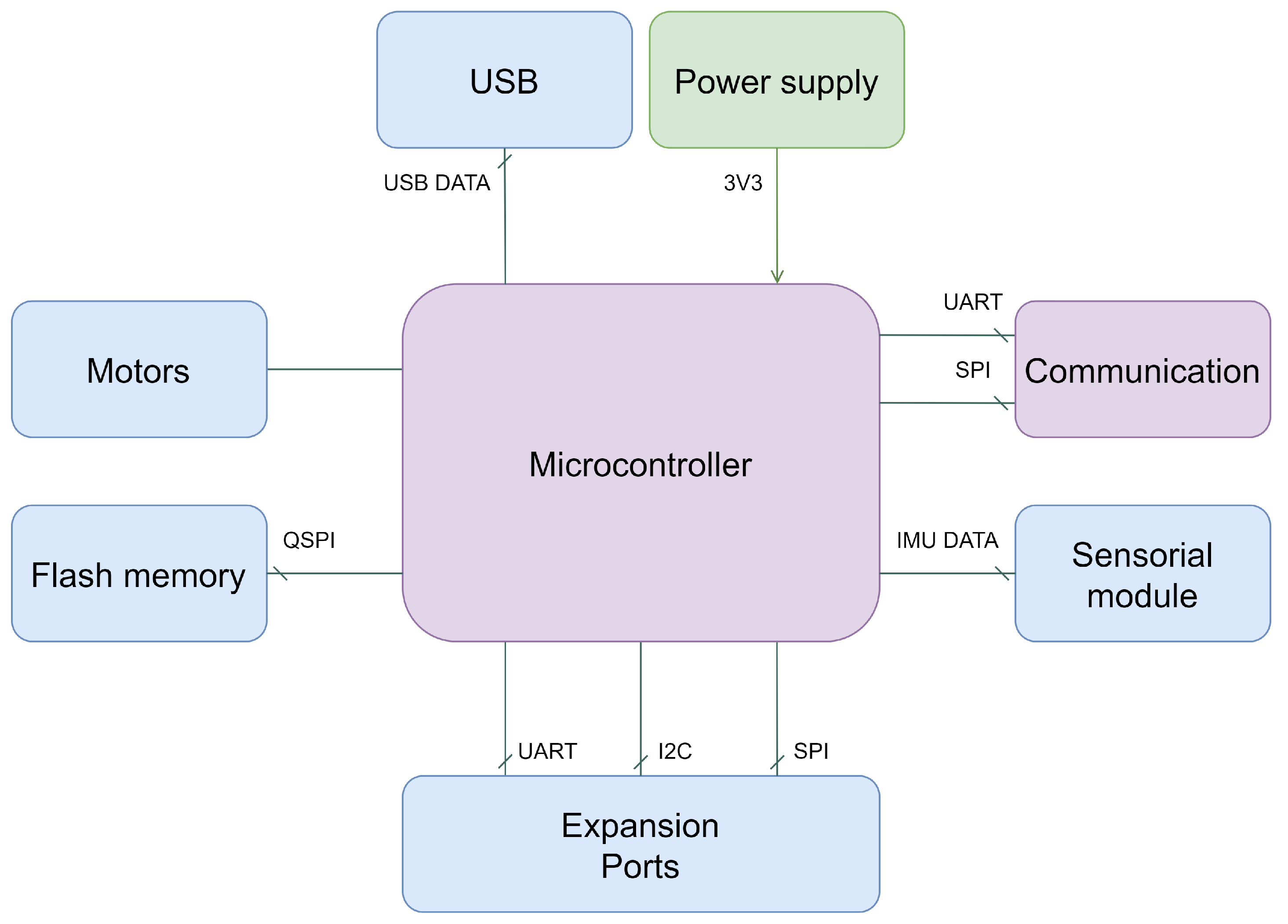
Figure 2 shows a high-level diagram of the NAB that demonstrates the fundamental blocks of the schematic and the communication between them. Since we used Crazyflie 2.1 as a starting point, this diagram represents the architecture of the schematic for the Crazyflie 2.1.
To develop the schematic, we utilised EasyEDA (
https://easyeda.com/, accessed on 27 March 2023) software with the existing library components because it is a free solution with online collaborative tools. EasyEDA enables the creation of original schematics and PCBs and displays the 3D visualisation of the designed boards.
Although we used Crazyflie 2.1 as the basis for developing the NAB, we made several significant changes.
Table 2 shows the components of both NAVs for all blocks.
Below, we explain each block and the changes we made. To achieve this, we compared the schematic of the Crazyflie 2.1 with that of the developed NAB.
The microcontroller is the most important component in the architecture since it is impossible to control a vehicle without it. Changing this component can lead to more efficient and effective control of the NAB. We decided to replace the STM32F405RG with the RP2040.
The Raspberry Pi RP2040 is a microcontroller designed to achieve high performance. The distinguishing features of this microcontroller are its scalable on-chip memory, dual-core processor, and increased peripheral set. The RP2040 is a stateless device that supports cached execute-in-place commands from external QSPI memory. This allows it to choose the appropriate flash memory. The manufacturer of the RP2040 uses a 40 nm process node, providing high performance, low dynamic power consumption, and low leakage (
https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf, accessed on 27 March 2023).
In
Table 3, we highlight some of the features of the RP2040 and STM32F405RG microcontrollers, which we used to perform a thorough comparison. The characteristics that show that the RP2040 has an advantage are highlighted in purple. On the other hand, the features that show that the STM32F405RG has an advantage are highlighted in green.
The RP2040 is dual-core, allowing it to run processes in parallel and making its performance significantly better. On the other hand, the main disadvantage of the RP2040 is its ARM Cortex-M0+ because the ARM Cortex-M4 in the STM32F405RG is faster and more energy-efficient. By analysing the Crazyflie 2.1 schematic, we found that the RP2040 had the required number of pins to connect the components to the microcontroller. The fact that the RP2040 had fewer pins did not invalidate its utilisation in the schematic.
The determining characteristic for the choice was related to the dimensions of the components. Since the goal was to build a NAV, the board dimensions were limited; therefore, we selected the RP2040.
The RP2040 is a recent purpose-built device that provides high performance and low dynamic power consumption, which are essential features for a NAV. The RP2040 dual-core component allows the running of parallel tasks and achieves significantly better performance than the single-core STM32F405RG. Given the small dimensions of the NAV, we selected the RP2040, as it was only 7.75 × 7.75 mm, whereas the STM32F405RG measured 12.7 × 12.7 mm.
Our goal was to develop a NAV capable of moving and pollinating autonomously. Communication is central in an autonomous vehicle so information about the surroundings is analysed and the NAV reacts in time.
The Crazyflie 2.1 uses the NRF51822 and RFX2411N as the core components of the communication module. This hardware provides low-latency/long-range radio communication and Low-Energy (LE) Bluetooth. However, as these components were not available due to the pandemic, it was necessary to find another way to communicate wirelessly.
The AI Deck 1.1 uses the NINA-W102 component to communicate via Wi-Fi. This component allows communication through various protocols. The only difference between the NINA-W102 and the NINA-W106 is the number of pins available. Since the NINA-W106 was the only one in stock, we chose this component.
We chose to incorporate the NINA-W106 into the schematic. This device has the following advantages: the ability to use different communication protocols and the fact that it does not require additional components to ensure operation.
The NINA-W106 is a standalone multi-radio MCU module consisting of a radio for wireless communication, an internal antenna, and a microcontroller. The radio supports Wi-Fi and Bluetooth communications. The NINA-W106 includes several components, making it a very compact standalone multi-radio module with dimensions of 10.0 × 14.0 × 2.2 mm (
https://content.u-blox.com/sites/default/files/NINA-W10_DataSheet_UBX-17065507.pdf, accessed on 27 March 2023).
The purpose of the NAB is to pollinate flowers so flower detection is essential. By adding the NINA-W106, a user can stream the images collected by the NAB over Wi-Fi and run the detection and control code off-board. The NINA-W106 can use the same communication protocol as the Crazyflie 2.1 components, without the need for additional elements.
The sensor module consists of an IMU and a distance sensor. The purpose of this module is to help in the navigation and control of the NAB.
The BMI088 is an IMU that combines a gyroscope and an accelerometer to detect movements and rotations. The VL53L1X is equipped with a Time-of-Flight (ToF) laser-ranging sensor that can accurately measure distances of up to 4 m and has a fast-ranging frequency of up to 50 Hz, regardless of the target’s colour and reflectance. This component is often used in drones to assist with flight.
By adding the VL53L1X component, we have upgraded the IMU module to a sensory module. In addition to the features of an IMU, with the VL53L1X, it is possible to measure the relative distance to the ground.
The schematic developed in the motor block maintained the structure of the schematic of the Crazyflie 2.1. We chose to add a fifth motor with a vertical orientation. The aim was to directly allow forward movement without modifying the roll angle. Managing the direction of the NAV for flower pollination became more straightforward due to the fifth motor. The addition of the fifth motor resulted in enormous advantages for NAB control. As described in
Section 4, after positioning the flower in the centre of the image, the NAB approached it to pollinate. To achieve this, it only needed to activate the fifth motor.
The flash memory selected for the NAB had better features such as a lower write-cycle time and maximum access time. In addition, it could connect to the RP2040 via the QSPI interface.
The power supply block contains components that regulate the voltage received via the USB port or the battery powering the NAB.
The BQ24075 is the most critical component of this power pack, as it regulates the system power supply (USB or battery). The device powers the system while independently charging the battery. The power input source for charging the battery is a USB port, connected via a VUSB signal. Furthermore, the nRF51822 controls the BQ24075 in the Crazyflie 2.1 schematic.
The LP2985 is a low-dropout (LDO) regulator with an output current capability of 150 mA continuous load current. This component is available in many voltages. Since V powers the system, the LP2985A-33DBVR circuit was chosen, which can regulate the voltage up to V. The VCC signal is V and supplies the integrated microcontroller and communication blocks. The VCCA signal is the filtered VCC signal, which results in analogue power that is only used by the sensorial module block.
Table 5 shows the minimum and maximum consumption of the components supplied by the LP2985A-33DBVR regulator, highlighted in green. By analysing the consumption, it was found that the LP2985A-33DBVR regulator was unsuitable, given that the NINA-W106 consumes 627 mW and the LP2985A-33DBVR provides a maximum of 495 mW.
The total consumption of the components powered by the regulator is
mW so we need a regulator that provides power equal to or greater than
mW. A higher current is required, as the voltage must be 3.3 V. The LDK130M33R (
https://www.st.com/resource/en/datasheet/ldk130.pdf, accessed on 27 March 2023) meets all the criteria (provides a maximum of 990 mW, which is higher than 820 mW) and is very similar to the LP2985A-33DBVR.
Table 6 shows the values of the new voltage regulator, which are highlighted in green.
The developed schematic is similar to Crazyflie 2.1 schematic. We eliminated the NCP702SN30, SIP32431, and LP29075 components and added the LDK130M33R regulator, thereby decreasing the number of connections and elements on the NAB board.
This block underwent many changes that reduced the number of components and connections, which was its most significant advantage, given the dimensions of a NAV. The changes were made due to the power consumed by the introduced components. The operation of this block is identical in both NAVs.
3.1.2. Printed Circuit Board
For the design of a PCB for a NAB, it is crucial to perform the following steps to minimise the length of the tracks:
Determine the PCB structure;
Study and place the components and define the PCB layout;
Analyse and make connections between components.
After defining the NAB schematic, we began work on the PCB design. The shape and dimensions of the PCB are similar to those of the Crazyflie 2.1 to ensure aerodynamics. The board consists of a 30 × 30 mm square with some arms at each vertex of 20 × 7 mm. As with the AI Deck 1.1, we added a small platform for the NINA-W106 (12.7 × 8 mm).
Board mapping was analysed to minimise track length. In particular, the following constraints in terms of the level of orientation and/or the position of each element on the board were considered:
Since the RP2040 is connected to the highest number of components, the microcontroller should be in the centre of the board. Additionally, it is crucial to avoid placing any elements that could interfere with vias in the opposite layer.
The voltage decoupling capacitors must be placed close to the RP2040 power supply pins to reduce noise.
The NINA-W106 must be in the top layer, given the size and weight of the component.
The micro USB connector must be on the top layer, closer to the edge, and oriented for easy access.
The 8-pin connectors must be on the sides of the board. None of these sides must coincide with the micro USB connector.
Four motors must be at each end of the arms so the corresponding connectors must be at the start (by arms, we mean the rectangular platforms of the board).
The fifth motor must be on the edge of the board.
The VL53L1X must be on the bottom layer to measure the distance to the ground.
The buttons of the flash memory must be on the top layer for easy access.
In addition, it is crucial to check the pinout of the RP2040 to place the other components accordingly. A board layout that minimises track length based on the RP2040 pinout was studied, along with the previously mentioned constraints. To ensure the NAB was balanced and the connections between components could be easily made, we carefully considered the weight distribution and orientation of the components when placing them on the PCB.
Additionally, different track specifications were considered when tracing the connections, namely:
For the connections of the microcontroller, it was necessary to use tracks with a width of 9 mil so that there was no contact between pins.
Most of the links were 10 mil wide.
The motor tracks were 14 mil wide to facilitate heat dissipation.
To facilitate communication between the different layers, we utilised vias—small holes that establish electrical connections—between all layers, with a diameter of 24 mil and a drilling diameter of 12 mil.
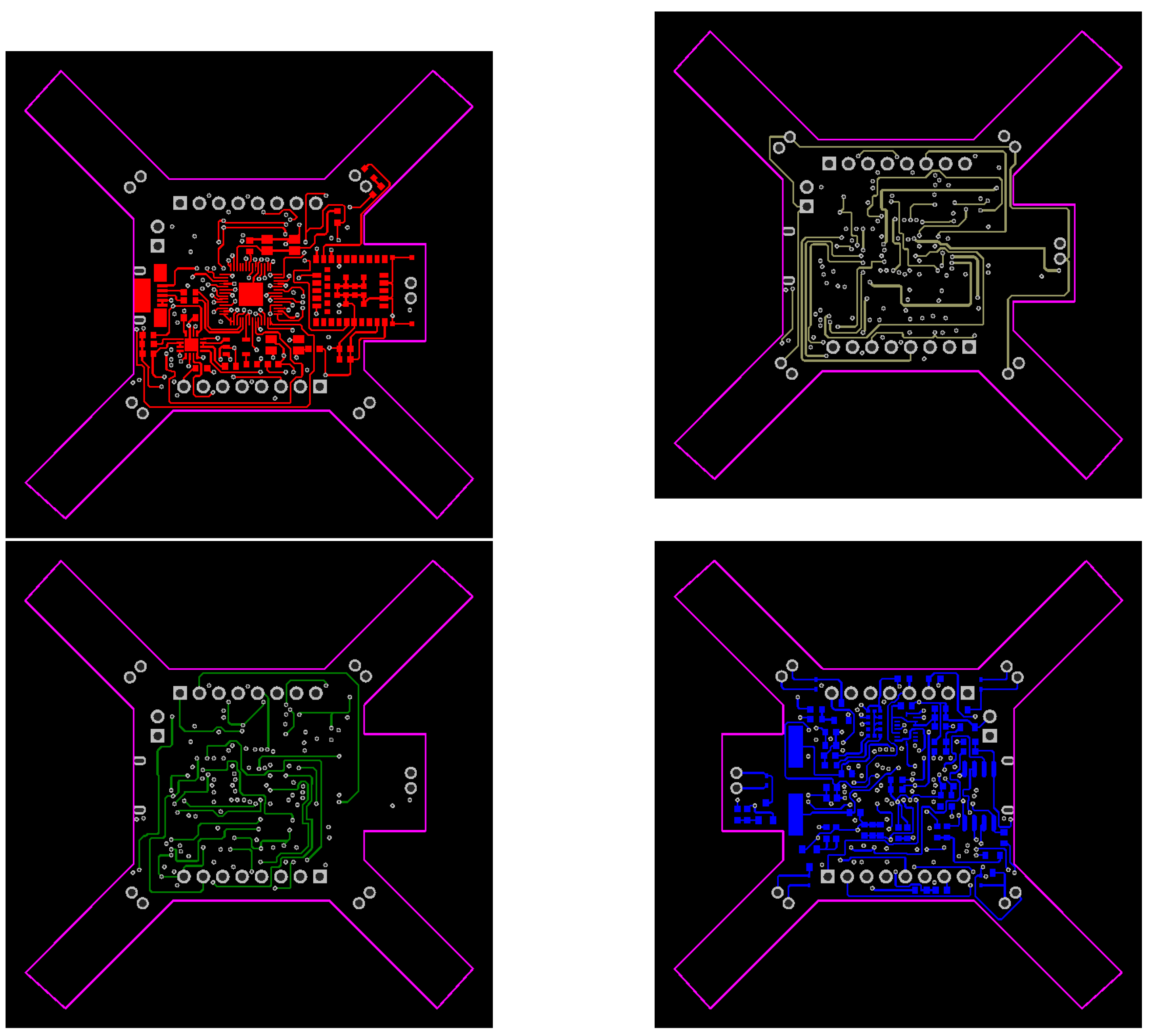
Figure 3 shows the components and connections of each layer. The upper and lower layers are the most populated. The wider tracks related to the motors are in the inner 1 layer.
The development of the NAB’s PCB presented many challenges due to the reduced board size that contained many components and increased connections.




 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}