Abstract
In this paper, an energy-management strategy based on fuel economy is presented to achieve a further range increase for range-extended light commercial vehicles. Estimation of the energy-management strategy was carried out using a neural-network-based surrogate model for an range-extended vehicle. Surrogate-based optimization plays an important role in optimization problems, which are based on complex structures with uncertainties in data sets due to various conditions. Neural networks have advantages in creating surrogate-based models in cases of complex problems with uncertainties in data sets to evaluate the process and estimate the outputs. This study discusses additional power-unit applications and vehicle integration for a light commercial electric vehicle. It provides preliminary design work and techniques for identifying NVH problems in particular. SIMULINK and neural-network-based surrogate models are established, and the changeable parameters of the vehicle, such as mass, battery/fuel-tank capacity, internal combustion engine power and electric motor power units are simulated in different dynamic and static conditions to determine an energy-management strategy for a range-extended vehicle based on fuel economy under various conditions. It was seen that APU parameters and an energy-management strategy significantly affected the fuel consumption of REX. A neural-network-based surrogate-model approach gave high-precision results in predicting the operating strategy according to different loading conditions to reduce fuel consumption. In some cases, it can be required to determine the fuel consumption results in various conditions with the variables, which may be out-of-boundary conditions. It was seen that the proposed neural-network-model also offers higher prediction ability in cases of unexpected results in data sets of various conditions compared to regression analysis. The results show that estimation and optimization of energy management using a neural-network-based surrogate model can be achieved by adapting the operating strategy according to different loading conditions to reduce fuel consumption. This study presents an approach for future new vehicle projects by transforming a prototype light commercial electric vehicle to REX. The proposed approach was developed to design the most efficient range-extended vehicle by changing all variables without costly computations and time-consuming analysis. It is possible to generate variable data sets and to have reference knowledge for future vehicle projects.
1. Introduction
In recent years, the emission regulations of the European Commission, have become more challenging in the automotive industry. Reducing CO2 emissions has become increasingly relevant to hybrid and electric vehicles due to the need to reduce fuel consumption. Although the range capabilities of electrified powertrain-based vehicles (EVs) are lower than conventional powertrain-based vehicles, electric vehicles are faced with many disadvantages, such as driving range, long charging time, short battery life and high prices. Despite significant technological improvements, batteries are quite expensive and currently much heavier than petroleum-based fuels with the same energy content. Zander et al. [1] worked on different range-extending support systems such as fuel cells, in-use REX and back-up REX for heavy truck transportation. As a result of the comparison between these systems, back-up REX is an optimum solution for heavy trucks. ICE is installed on the electric motor of the battery electric vehicle (BEV) powertrain and the electric machine works as a generator. The main difference in the present study is the installation of an independent electric motor working as a generator.
Wu et al. [2] prepared a study to propose a design to extend the range with an intelligent hydrogen fuel cell range extender for BEVs. According to the proposed design, the range of the vehicle can be extended by more than 50% for small BEVs and 25% for large BEVs. The main advantage of the present study was to extend the range of the light commercial EV by more than 200% with REX. Wahono et al. [3] focused on developing fuel efficiency and exhaust emissions of engines for the REX in various operating conditions. The engine data were collected from powertrain-simulator software in order for it to be used in the vehicle simulator. In the present study, the engine data were collected from the physical model as experimental test results and transferred to Matlab/Simulink.
There have been many research studies focused on overcoming these limitations, especially based on battery life, fast charging systems and auxiliary unit applications, to increase the range and reduce the charging time of electric vehicles [4]. REX are designed with APU and a small-capacity battery pack as an optional alternative solution to electric vehicles to overcome range limitations [5].
One of the solutions to the range-anxiety problem is the use of range extenders [6]. EVs with inbuilt range extenders are currently available. The new models of some automobile companies are an example of the recent efforts of the automotive industry to bring the range-extender technology to the EV market. In recent years, the range-extender approach has also been considered as an interesting solution to solve range problems by many researchers. [7]. Although internal combustion engines are widely used as the range-extender source, there are many research studies on fuel cell and micro gas turbine applications [2,8]. Tan et al. [9] worked on a micro gas turbine as a range extender for an electric vehicle. Experimental and simulation data were obtained as a result of this study. The peak shaft power of the micro gas turbine was measured as 9.5 kW. In the present study, the maximum back EMF obtained from the ICE was 8 kW. Tran et al. [10] investigated five different hybrid models by using Matlab/Simulink in order to find the best performance for fuel consumption and emissions. As a result of the simulations, one powertrain design was found to achieve the best performance. The design was a P4 hybrid powertrain, which had a 2.5 L engine with a 150 kW electric motor and a 133 kWh battery pack. The study was not about REX, but it included a similar approach to the present study for Matlab/Simulink models. Borghi et al. [11] presented a comparison between the 2-stroke and 4-stroke engine. The 2-stroke engine was 35% lighter and mechanical loads 40% lower than the 4-stroke engine. However, the emission level of the 2-stroke engine should be improved with the help of an after-treatment system. Li et al. [12] worked on a REEB (range-extended electric bus) to extend driving ranges and reduce internal combustion engine fuel consumption. There are two principal driving control modes: blended (BL) and charge-depleting/charge-sustaining (CD-CS). A charge-depleting/charge-sustaining (CD-CS) driving control has been commonly used in a range-extended electric vehicles (RE-EVs). However, the CD-CS mode can decrease the fuel efficiency in case of the system efficiency is low.
It was seen that the vehicle mass plays an important role in designing range-extended vehicles and determining the energy-management strategy in the case of light commercial vehicles. Total vehicle mass is variable due to various loading conditions, especially in light commercial vehicles. Load values in light commercial vehicles can frequently change during the day. Vehicle weight is a crucial parameter for the range of electric vehicles. Therefore, there are variations in the power consumption of the vehicle. In this research, we aimed to produce the electrical power corresponding to the consumed power with the lowest fuel consumption under various loading conditions. Rolling resistance and acceleration resistance change depend on the vehicle total mass. For this reason, power consumption will be different according to the load of the vehicles. Power consumption and range can be simulated and calculated depending on variable loads to optimize vehicle ICE operation points to reduce fuel consumption and increase the range of the vehicle.
Estimation of parameters of sub systems is often difficult in practice and necessitates expensive sensors, monitoring and control. Therefore, the estimation and optimization of energy-management strategies has become an expanding research area for hybrid and electric vehicles [13].
Jingfu et al. [14] compared dynamic programming (DP) and the δSOC control strategies on the Harbin urban bus driving cycle. The analysis showed that the δSOC strategy was an ideal energy-management strategy for REX. You [15] focused on a driving control strategy for a REX, in which both route information and the driver’s characteristics were included. The route information was collected, according to the target route, in order to obtain the optimal engine on/off threshold power. A linear regression model was obtained and considered in route-based control (RBC). Chen [16] focused on three types of strategy—thermostat control strategy (TCS), power-follower control strategy (PFCS) and equivalent-consumption-minimization strategy (ECMS). As a result of 12 NEDC cycles. ECMS had the best SOC tracking performance among these controls. A comparative study and validation of state estimation algorithms for battery-management systems were determined for model-based estimation algorithms. It was shown that a simple estimation method with Kalman-based methods required less computational time and memory usage [17]. Mark et al. [18] focused on cell balancing of the battery as a main function of the battery-management system. Different battery-management systems were investigated to increase the life of the battery.
Although there are many studies on range-extended vehicles, to the best of our knowledge, neural-network-based prediction models have not been widely researched. Further work is needed to apply artificial-intelligence techniques in the case of range-extended-vehicle design to predict response variables. In this research, an energy-management strategy based on fuel economy is presented to achieve further range increase and to estimate the parameters of sub systems for the range-extended light commercial vehicle under variable loads to reach the targeted range using an artificial neural network. The power consumptions were calculated under different load and speed conditions and also within unexpected cases of various data. Optimum fuel consumption values were also computed according to the different power values produced by the generator.
Simulink- and neural network-based surrogate models were established, and the changeable parameters of the vehicle, such as mass, battery/fuel-tank capacity, internal combustion engine power and electric motor power units were simulated at different dynamic and static conditions in order to determine an energy-management strategy for a range-extended vehicle based on fuel economy under various conditions. Surrogate-based optimization played an essential role in the optimization problems, which were based on complex structures with uncertainties in data sets due to various conditions [19,20]. Neural networks have advantages in creating surrogate-based models in case of complex problems with uncertainties in data sets to evaluate the process and estimate the outputs. The main objective was to increase the efficiency of the engine and decrease the fuel consumption using 1D analysis, experimental tests and Levenberg–Marquardt neural network algorithms to define the surrogate model. It was seen that APU parameters and the energy-management strategy significantly affected the fuel consumption of range-extended vehicle. The results show that the estimation and optimization of energy management using a neural network-based surrogate model can be achieved by adapting the operating strategy according to different loading conditions to reduce fuel consumption.
2. Design of Range-Extended Vehicle and Energy-Management System
The range-extender (REX-type series hybrid vehicle) is one of the best examples of improving the range capability of conventional engines. Additional power-unit applications are used for powertrain systems to improve the range capability. Estimation and optimization of energy-management strategies are important topics for range-extended vehicles. The range capability is directly affected by the optimization of energy management. In literature, modeling and experimental investigations, the layout and design of engines have been investigated for range-extender applications [21,22]. A comprehensive overview of the hybrid-electric vehicles is given for the powertrain configurations, powertrain control techniques and electronic control units by Bayindir et al. [23]. Internal combustion engines are examined in terms of their acoustic behavior when used as range extenders [24]. Range-extender concepts, regarding small engine technologies, designs and implementation of battery-management systems, are evaluated with alternative concepts for the application in a range-extended vehicles [25]. The internal combustion engine, generator and inverter are integrated into a pure electric vehicle in order to transform the vehicle from EV to REX [23,26].
There is a need for experimental investigations due to the structure and load change to determine auxiliary power unit (APU) performances with specific NVH characteristics, especially to achieve low NVH applications [27,28,29]. In this study, the NVH performance of the internal combustion engine was evaluated first as single-cylinder engines work noisily. Data sets were obtained from a system consisting of a prototype light commercial electric vehicle for the design of a range-extended vehicle. In the first stage, the noise and vibration levels were determined by the NVH tests. According to NVH tests, the maximum engine speed for an acceptable noise level is determined as 3000 rpm. In the experimental tests at 3000 rpm engine speed, it was determined that the engine knocked above the 8 kW generator back-emf value. Therefore, the APU boundary operating points were determined as the maximum 3000 rpm engine speed and maximum 8 kW back EMF of the generator.
According to these boundary conditions, the fuel consumption of the engine was measured and the experimental fuel consumption value obtained. Many researchers have presented a minimum level of discharging of around 20% and a maximum level of charging between 80% and 90% [30]. Batteries of electric vehicles process usually with a SOC ranging from 10% to 90% and at a temperature ranging from −25 °C to 60 °C [16].
In this study, battery SOC was a minimum at 10% and a maximum of 90%. The capacity of the light commercial prototype vehicle battery was 21 kWh. Due to the vehicle having a low-capacity battery, the blended mode was determined as a battery management strategy. The vehicle did not have enough electric power to sustain high speeds and high weights without the help of the internal combustion engine. For this reason, when the battery SOC dropped below 80%, the APU must be ON in order to sustain the power. The maximum load capacity of the vehicle was 400 kg. For light commercial vehicles, load and speed values may vary during the day. For this reason, simulation results are needed according to different load and speed values.
For commercial vehicles carrying variable loads, larger batteries must be used since EV mode and APU have to work together. However, this is not possible due to high battery costs. Power demand is variable and it must be covered. Therefore, it is important to choose the appropriate engine for future projects and to estimate the operating strategy for different loading conditions to reduce the fuel consumption of the REX.
In order to transform the prototype light commercial electric vehicle from EV to REX, a one-cylinder 44 hp ATV engine and generator were integrated into the vehicle as APU, as shown in Figure 1. The new total weight of the prototype vehicle was 1690 kg (with a driver, no load).
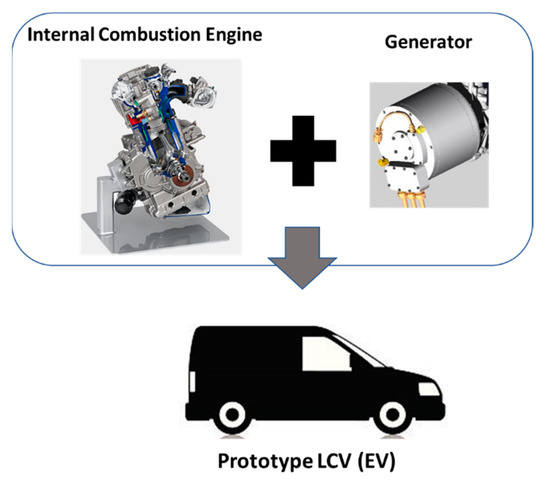
Figure 1.
Prototype light commercial EV, ICE and generator.
According to NVH tests, the highest speed at which the internal combustion engine could operate comfortably was determined as 3000 rpm. Microphones were placed on sound source location in order to measure noise level, as shown in Figure 2.
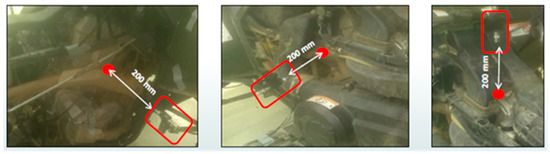
Figure 2.
Microphone positions for NVH Test.
As a result of the NVH tests, the noise levels measured on the left side of the engine were 83.01 dB (decibel) at 1200 rpm, 83.65 dB at 1500 rpm, 86.49 dB at 2000 rpm and 93.06 dB at 3000 rpm, as shown in Figure 3.
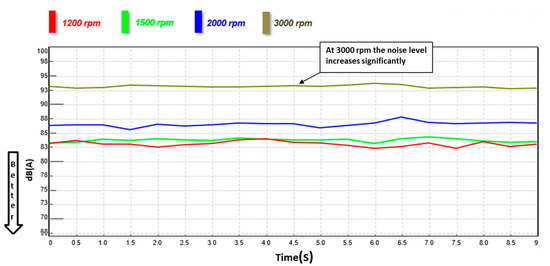
Figure 3.
Engine left-side noise level at constant rpm.
For the right side of the engine, the noise level is measured was 83.49 dB at 1200 rpm, 84.89 dB at 1500 rpm, 86.85 dB at 2000 rpm and 92.17 dB at 3000 rpm, as shown in Figure 4.
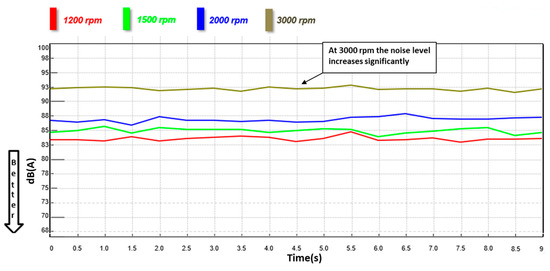
Figure 4.
Engine right-side noise level at constant rpm.
For the upper side of the engine, the noise level is measured as 78.14 dB at 1200 rpm, 79.95 dB at 1500 rpm, 82.83 dB at 2000 rpm and 88.72 dB at 3000 rpm, as shown in Figure 5.
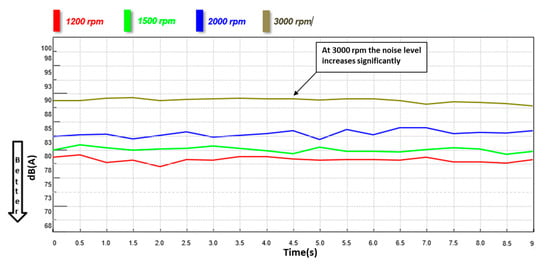
Figure 5.
Engine upper-side noise level at constant rpm.
The power−torque curve of the internal combustion engine is shown in Figure 6. According to the power curve, the engine produced maximum horsepower at 7000 rpm and maximum torque at 6000 rpm.
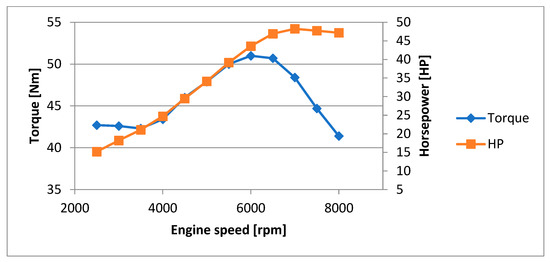
Figure 6.
ICE horsepower−torque curve.
As a result of NVH tests, 3000 rpm was determined as the maximum speed of the ICE, and all simulations has to be performed with that boundary value. It was seen that due to the very noisy and vibrating operation of the selected engine, the engine could not be operated at high speeds. For this reason, high energy could not be obtained from the generator. Due to the low battery capacity, it was not possible to charge the battery by going into electric mode for a long time and then starting the engine. Therefore, a charge-depleting (CD)/charge-sustaining (CS) strategy was not applicable for this vehicle. Normally, the targeted situation is to drive the vehicle with electrical energy, which is cleaner energy. But the prototype vehicle used in this study could not fulfill this requirement. The EV mode and APU had to work together. For commercial vehicles carrying variable loads, larger batteries must be used. Therefore, it is important to choose the appropriate engine for future projects and to estimate the operating strategy for different loading conditions to reduce the fuel consumption of Rex.
3. Modeling of APU and Range-Extended-Vehicle Control: Simulation Model
An ICE, generator and inverter are placed in the cargo area of the vehicle for APU unit, as shown in Figure 7. All mechanical and electrical connections were structured on the light commercial electric vehicle.
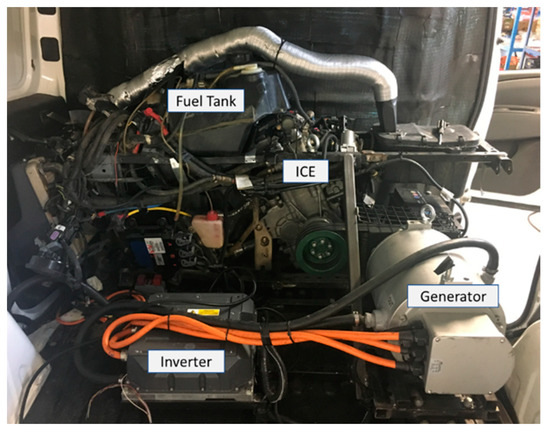
Figure 7.
APU architecture—ICE, generator and inverter integration on the vehicle.
Experimental fuel consumption values were obtained from fuel-consumption tests. The fuel-consumption monitoring device and the experimental setup are shown in Figure 8. The test device consisted of an analog signal receiver with a display and an apparatus that measured the fuel flow. The fuel flow meter was mounted on the fuel pipe of the engine. The apparatus was mounted between the fuel pump and the fuel injector and all of the measured fuel gave the fuel consumption value as L/h (liter/hour). Fuel consumption data is displayed with the help of a monitoring device.
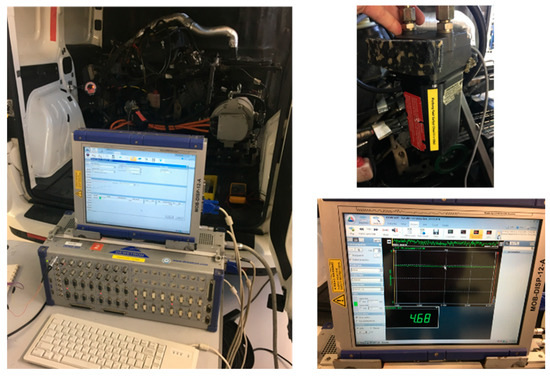
Figure 8.
Fuel-consumption test on APU with fuel-consumption test device.
The reverse engineering method was used to determine the placement on the vehicle on the 3D data, and the ATV engine and its components were scanned, modeled and transferred to the virtual environment, as shown in Figure 9. In this way, the current situation was observed and necessary actions determined before physical modifications on the electric vehicle.
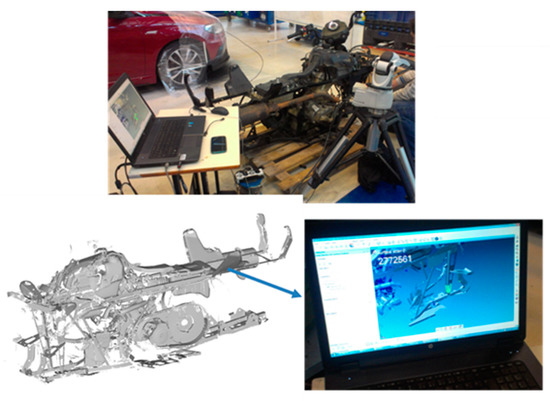
Figure 9.
Scanning ICE with Rapidform reverse-engineering software [31].
The parts were modeled by scanning in detail after the ATV disassembly. In this way, virtual verifications to determine the placement on the vehicle could be made on a component basis. In addition to the internal combustion engine, the fuel tank, radiator, fan, exhaust pipe and carcass were among these components.
In order to create the range-extender operating system, the following control chart was created considering that the internal combustion engine, generator and battery charge status would provide input as the main parameters, as shown in Figure 10. In the next stage, the operating strategy of the internal combustion engine will be determined depending on the state of charge by determining the parameters on this scheme. In addition, optimization work will be carried out in order to provide optimum working conditions to tolerate the variations in driving style and consequently in electricity consumption.
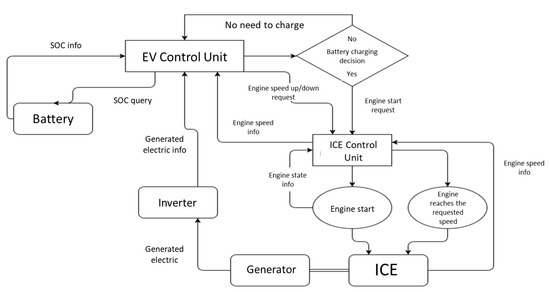
Figure 10.
REX-control chart.
All parameters were taken from the vehicle and transferred to SIMULINK, as shown in Figure 11. The boundary conditions of the ICE such as maximum rpm of the ICE and maximum value of the generator back EMF were determined with the help of NVH tests.

Figure 11.
Basic Simulink model of REX.
There are many variables that affect the range of the vehicle, such as battery capacity, rolling resistance of the tires, aerodynamic coefficient and total vehicle mass. Another important point is the reduction of the power demand of the vehicle. The aerodynamic coefficient of the vehicle and tire specification can be changed in order to reduce air resistance and rolling resistance to design the most efficient vehicle by making changes on all variables.
In order to calculate power requirement of the vehicle in variable conditions, the following equations are used to design the simulation model. The road load can be formulated, as given below [32]:
The rolling resistance force related to flattening of the tire on the road contact surface can be expressed, as given below:
The rolling resistance can be reduced by increasing the tire pressure. The friction force can be expressed, as given below:
Aerodynamic drag, , is the viscous resistance of air acting on the vehicle, as given below:
The climbing resistance and the downgrade force can be expressed as given in Equation (5). The positive processing sign is for the climbing resistance and the negative processing sign is for the downgrade force, as given below:
The tractive force is provided by the electric motor to overcome the road load in EVs and the equation of motion is as follows:
Vehicle specifications were transferred to Matlab/Simulink in order to generate new data on the simulation model, such as vehicle mass, aerodynamic coefficient, tire specifications and fuel-consumption data, as shown in Figure 12. Variable input parameters were defined as vehicle mass, vehicle speed and back EMF of the generator.
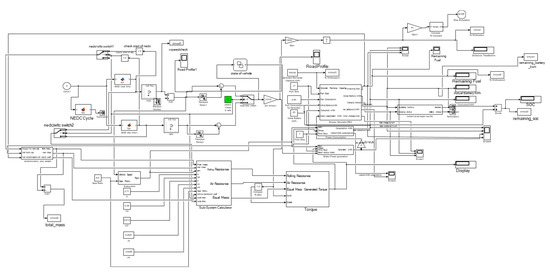
Figure 12.
REX vehicle simulation model.
The inputs of the constant and variable parameters in each of the vehicle dynamics equations were made into a block diagram, as shown in Figure 13.
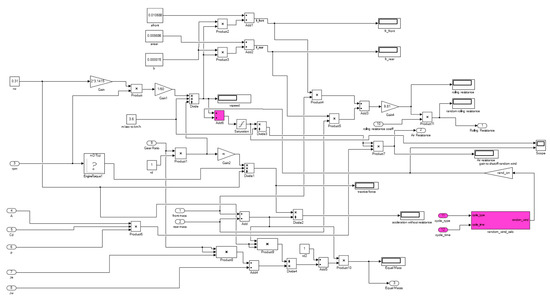
Figure 13.
Simulink block diagram with all parameters.
Tire specifications, aerodynamic coefficient, gear ratio, vehicle mass, fuel tank capacity and all other parameters are included in block diagram. The NEDC driving cycle is referenced to understand that the simulation model gives correct results as shown in Figure 14.
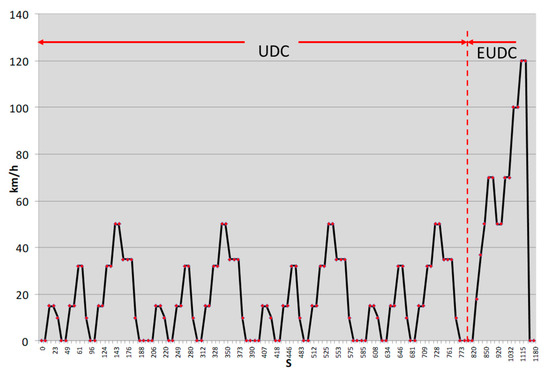
Figure 14.
NEDC driving cycle.
When the Rex runs under NEDC driving cycles, it is always expected that the battery SOC will be reduced to the threshold at the end of the driving cycles [33]. In this study, firstly, based on the NEDC driving cycle, the range of the electric vehicle was calculated with the help of simulation model with battery power only. As a result of one NEDC driving cycle in the simulation model, 2.05 kWh energy consumption was calculated. Considering that one cycle is approximately 11 km, the range in EV mode was calculated as 118 km according to the current battery capacity, as shown in Figure 15a. The simulation model result was very close to experimental test result of the EV vehicle. As a result, it was proven that the simulation model worked correctly. It is possible to work with all driving cycles with the simulation model. The sensitivity of the model has been verified by comparing the experimental data with the simulation results using the experimental data according to the NEDC cycle.
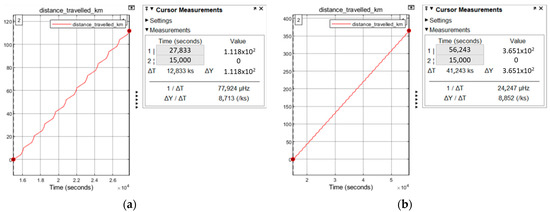
Figure 15.
Comparison of (a) EV mode and (b) REX mode ranges for NEDC driving cycle.
When the internal combustion engine was running at a constant 3000 rpm and the generator was loaded with 8 kW back EMF, the vehicle’s range was calculated as 365 km when all 17 L fuel and battery capacity was used, as seen in Figure 15b. The accuracy of the model was confirmed as a result of the verification with reference to a standard cycle. However, for a light commercial vehicle in which conditions of use and load status are constantly changing, more variables need to be predicted. Therefore, an artificial neural network (ANN)-based surrogate model approach was applied in order to predict data for fuel consumption and battery SOC. Input data was generated using LHS (Latin hypercube sampling) within determined boundaries for 1D analysis on SIMULINK.
Output parameters were defined as fuel consumption and remaining SOC of the battery. The boundary conditions of the variables to be entered as input to the Matlab/Simulink model are given in Table 1.

Table 1.
Boundary conditions of Matlab/Simulink model.
4. Results
In this study, a prototype light commercial range extended electric vehicle design was studied to estimate energy-management strategy and achieve the minimum fuel consumption also considering NVH targets. Experimental tests were carried out according to the maximum 3000 rpm engine speed, it was seen that the engine ran with knocks above 8 kW back EMF of generator. For this reason, the maximum back EMF of the generator was determined as 8 kW. Experimental fuel-consumption tests were performed with these boundary conditions. All boundary conditions and test results were transferred to Matlab/Simulink model together with the other specifications of the vehicle. The light commercial vehicle was driven at different loads and speeds during the day as it was necessary to run simulations according to different values. Therefore random samples were run in the simulation model with the help of the Latin hypercube samples (LHS) method to obtain various data [34]. The fuel consumption and battery charge status values obtained as a result of the simulations run at a range of 150 km are shown in Table 2.
Table 2.
Data samples generated with LHS method.
Farmann and Saurer [35] presented a comprehensive review of on-board state-of-available-power prediction techniques for lithium-ion batteries in electric vehicles. An ANN was used to estimate the state of charge for battery voltage prediction, SOC estimation was taken into consideration with neural networks and bias correction techniques for the battery degradation by some authors [36,37,38]. State-of-charge estimation of batteries using deep neural networks were given with machine learning approach by Chemali et al. [39]. Energy-management systems were also introduced using neural networks [40,41].
In this study, estimation of the energy-management strategy was carried out using a neural-network-based surrogate model based on fuel economy under various conditions. The surrogate model based on neural network was structured with input, hidden and output layers, as shown in Figure 16 [42]. The feedforward neural network (FNN) is a widely used algorithm. Any nonlinear continuous function may be approximated precisely using a three-layered feed-forward neural network [43,44].
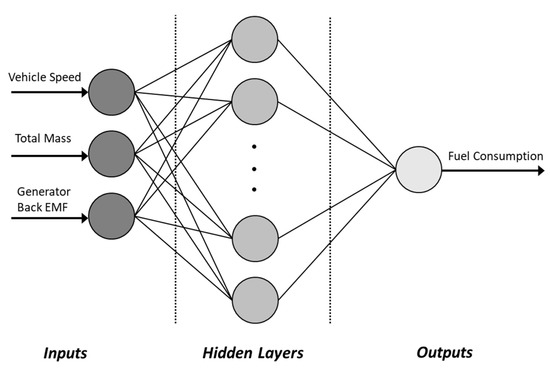
Figure 16.
The architecture of artificial neural network (ANN).
The surrogate-based method is usually used to evaluate the processes, especially if the model is designed with costly simulations and physical experiment tests [19,45]. In this study, neural-network-based surrogate model was constructed to solve the data fitting of a range-extended vehicle since NN has the advantage of providing better estimations in process parameters [20,46,47]. The Matlab tool was used to create and train the neural network model with the following three main steps [6]:
- Input and output variables are defined and data is imported to train NN model;
- Data is split into parts with training, validation and test sets;
- NN model is trained with LM and BR algorithms based on Pearson correlation coefficient and mean square error.
The Levenberg−Marquardt (LM) algorithm was used to train the ANN model with 75% of the data set. The rest of the data set was taken into account in the validation and testing process. In this research, the data was divided into subsets using the hold-out method for testing, validation and training [42]. This technique is usually used if the data set is small, such as 30 data. In this study, 75%, 15% and 10% of data was used for training, validation and testing.
The R-values were computed as training: R = 0.994, validation: R = 0.925 and test: R = 0.989 for 30 times simulation results, as shown in Figure 17. In order to be close the R-value to 1, the number of simulations can be increased to 90 times. The present neural network architecture has a minimum R-value of 0.99. The results of the vehicle simulation test and NN predicted results are given in Table 3. The neural network model has high predictive ability.
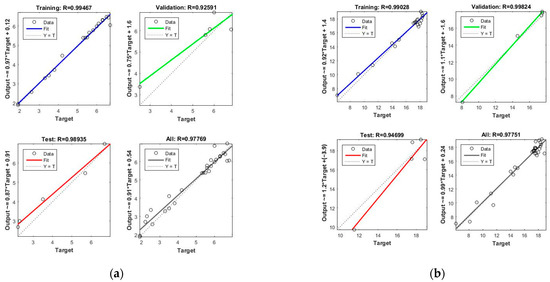
Figure 17.
The R-value curves of the ANN structure for (a) fuel consumption and (b) remaining SOC.
Table 3.
Vehicle simulation test and ANN predicted results comparison.
MLR models were used to define the relationship between the input data set and output variables with regression function. They are widely used to predict the responses of variables in case of various input data sets using regression function [48]. In this study, NN and MLR were used to predict the fuel consumption response for the required specifications. The MLR prediction performance is shown in Figure 18. R-values for RMSE and R-squared were 0.52 and 0.90 and the accuracy of the prediction model was lower than ANN model. ANN gave better and more accurate results compared to regression-based methods due to its ability to learn from previous situations. A comparison of the response-variable results for each method is given in Table 4. It can be seen that ANN prediction-based model is a better approach to predicting the response variables compared to the MLR regression-based model especially in case of various conditions.
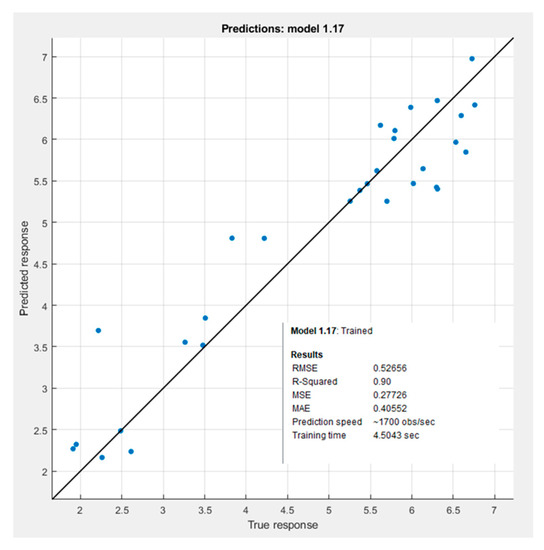
Figure 18.
The R-value curves of the MLR structure for fuel consumption.
Table 4.
Comparison of Simulation, ANN and MLR results to predict the responses.
It was shown that when the battery SOC dropped below 80%, the APU started in order to sustain the power. The effects of the vehicle speed, generator back EMF and weight on the fuel consumption and remaining battery SOC level can be seen in Figure 19. The values of the vehicle speed, generator back EMF and weight were defined as “normalized value” on the abscissa from 0 to 1. As the vehicle weight increased, the power requirement increased due to the increasing of rolling resistance. Since the battery SOC drops faster, the APU must be started in early kilometers of the total distance. At the end of 150 km distance, when the weight of the vehicle increases at constant speed, fuel consumption increases. As the vehicle speed increases, the air resistance increases, so the power requirement also increases. In order to supply this required power, the generator back EMF is increased. In this case, the engine is loaded and fuel consumption increases.
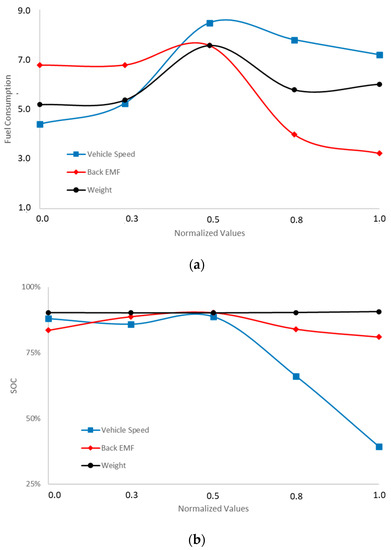
Figure 19.
Effects of the parameters on (a) fuel consumption and (b) SOC.
In some cases, it can be required to determine the fuel consumption results in various conditions with the variables, which may be out-of-boundary conditions. There is a need to predict the outcomes in case of out-of-boundary and various conditions. In these cases, the NN model may act efficiently to predict the results since NN can learn from previous cases.
The results of three simulation and NN prediction tests were obtained for the variables due to out-of-boundary conditions, as given in Table 4. It can be seen that the proposed neural network model also has high predictive ability in the case of out-of-the boundary conditions as compared to regression analysis.
In this way, predicted values can be obtained with the ANN method in cases of out-of- boundary conditions in future projects. It can be stated that prediction of an energy-management strategy using a neural-network-based surrogate model can be achieved by adapting the operating strategy according to different loading conditions to reduce fuel consumption for REX.
5. Conclusions
In this research, an approach based on a NN-based surrogate model was developed for new vehicle projects by transforming the prototype light commercial electric vehicle to REX. The proposed approach was developed to design the most efficient range-extended vehicle by changing all variables without costly computations and time-consuming analysis. The results show that the estimation of energy management using a neural-network-based surrogate model can be achieved by adapting the operating strategy according to different loading conditions to reduce fuel consumption. It is possible to start the optimization after an acceptable neural-network-based surrogate model has been developed.
The neural-network-based surrogate model approach gave high precision results, as presented in the above Results section, to predict the operating strategy according to different loading conditions to reduce fuel consumption without further need for costly computations and time-consuming analysis. The results also showed that APU parameters and an energy-management strategy significantly affect the fuel consumption of REX. It was seen that the present approach helps to generate variable data sets and to have reference knowledge for future vehicle projects.
It can be required to determine the fuel consumption results in various conditions with the variables which may be out-of-boundary conditions. The proposed NN approach is also preferable in estimating the outcomes in case of uncertainties in data sets without the need for design space evaluations as in the regression method. The results showed that the NN model is a better approach to predict the response variables compared to MLR regression-based model, especially in case of various conditions within unexpected input data cases since NN can learn from previous cases. It may act efficiently in cases of estimations for new data sets under various conditions. This plays an essential role in evaluating the processes and defining the operating strategy according to different loading conditions to reduce fuel consumption for REX.
Author Contributions
Conceptualization, E.T., E.B. and F.Ö.; methodology, E.T., E.B. and F.Ö.; software, E.T., A.K. and M.Ç.; validation, E.T.; formal analysis, E.T. and A.K.; investigation, E.T.; resources, E.T., E.B. and F.Ö.; data curation, E.T.; writing—original draft preparation, E.T.; writing—review and editing, E.T., E.B. and F.Ö.; visualization, E.T.; E.T.’s Ph.D. work supervision, F.Ö. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
The authors would like to express their sincere gratitude to TOFAŞ Automotive Factory Bursa, Türkiye, which offered its software and hardware infrastructure.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| Tractive force | |
| Road load | |
| Rolling resistance force | |
| Stokes friction force | |
| Aerodynamic drag force | |
| Climbing and downgrade resistance force | |
| Tire rolling resistance coefficient | |
| Vehicle mass | |
| Gravitational acceleration constant | |
| Grade angle | |
| Stokes coefficient | |
| Vehicle speed | |
| Head-wind velocity | |
| ξ | Air density |
| Aerodynamic drag coefficient | |
| Vehicle frontal area | |
| Rotational inertia coefficient | |
| Electric motor inertia | |
| Wheel inertia moment | |
| Wheel radius | |
| ANN | Artificial neural network |
| REX | Range extender |
| BEV | Battery electric vehicle |
| NVH | Noise, vibration and harshness |
| APU | Auxiliary power unit |
| EV | Electric vehicle |
| REEB | Range-extended electric bus |
| CD | Charge-depleting |
| CS | Charge-sustaining |
| BL | Blended |
| SOC | State of charge |
| RE-EV | Range-extended electric vehicle |
| ICE | Internal combustion engine |
| DP | Dynamic programming |
| RBC | Route-based control |
| FNN | Feedforward neural network |
| TCS | Thermostat control strategy |
| PFCS | Power-follower control strategy |
| ECMS | Equivalent-consumption-minimization strategy |
| NEDC | New European driving cycle |
| UDC | Urban driving cycle |
| EUDC | Extra urban driving cycle |
| LM | Levenberg−Marquardt |
| EMF | Electromagnetic field |
| LHS | Latin hypercube samples |
| ATV | All-terrain vehicle |
| MSE | Mean-squared error |
| Fig | Figure |
| LCV | Light commercial vehicle |
| MLR | Multiple linear regression |
References
- Zander, L.; Svens, P.; Svärd, H.; Dahlander, P. Evaluation of a Back-up Range Extender and Other Heavy-Duty BEV-Supporting Systems. World Electr. Veh. J. 2022, 13, 102. [Google Scholar] [CrossRef]
- Wu, D.; Ren, J.; Davies, H.; Shang, J.; Haas, O. Intelligent Hydrogen Fuel Cell Range Extender for Battery Electric Vehicles. World Electr. Veh. J. 2019, 10, 29. [Google Scholar] [CrossRef]
- Wahono, B.; Santoso, W.B.; Nur, A.; Amin. Analysis of range extender electric vehicle performance using vehicle simulator. Energy Procedia. 2015, 68, 409–418. [Google Scholar] [CrossRef]
- Karunarathna, J.; Madawala, U.; Baguley, C.; Blaabjerg, F.; Sandelic, M. Battery Reliability of Fast Electric Vehicle Charging Systems. In Proceedings of the IEEE Southern Power Electronics Conference (SPEC), Kigali, Rwanda, 6–9 December 2021. [Google Scholar]
- Tran, M.K.; Bhatti, A.; Vrolyk, R.; Wong, D.; Panchal, S.; Fowler, M.; Fraser, R. A Review of Range Extenders in Battery Electric Vehicles: Current Progress and Future Perspectives. World Electr. Veh. J. 2021, 12, 54. [Google Scholar] [CrossRef]
- Wang, Y.; Lou, D.; Xu, N.; Fang, L.; Tan, P. Energy management and emission control for range extended electric vehicles. Energy 2021, 236, 121370. [Google Scholar] [CrossRef]
- Al-Doori, M.; Paluszczyszyn, D.; Elizondo, D.; Passow, B.; Goodyer, E. Range Extended for Electric Vehicle Based on Driver Behaviour Recognition. In Proceedings of the 5th IET Hybrid and Electric Vehicles Conference (HEVC), London, UK, 5–6 November 2014. [Google Scholar]
- Ji, F.; Zhang, X.; Du, F.; Ding, S.; Zhao, Y.; Xu, Z.; Wang, Y.; Zhou, Y. Experimental and numerical investigation on micro gas turbine as a range extender for electric vehicle. Appl. Therm. Eng. 2020, 173, 115236. [Google Scholar] [CrossRef]
- Tan, F.; Chiong, M.; Rajoo, S.; Romagnoli, A.; Palenschat, T.; Martinez-Botas, R. Analytical and experimental study of micro gas turbine as range extender for electric vehicles in Asian cities. Energy Procedia 2017, 143, 53–60. [Google Scholar] [CrossRef]
- Tran, M.-K.; Akinsanya, M.; Panchal, S.; Fraser, R.; Fowler, M. Design of a Hybrid Electric Vehicle Powertrain for Performance Optimization Considering Various Powertrain Components and Configurations. Vehicles 2021, 3, 20–32. [Google Scholar] [CrossRef]
- Borghi, M.; Mattarelli, E.; Muscoloni, J.; Rinaldini, C.A.; Savioli, T.; Zardin, B. Design and experimental development of a compact and efficient range extender engine. Appl. Energy 2017, 202, 507–526. [Google Scholar] [CrossRef]
- Li, J.; Jin, X.; Xiong, R. Multi-objective optimization study of energy management strategy and economic analysis for a range-extended electric bus. Appl. Energy 2017, 194, 798–807. [Google Scholar] [CrossRef]
- Cuma, M.U.; Koroglu, T. A comprehensive review on estimation strategies used in hybrid and battery electric vehicles. Renew. Sustain. Energy Rev. 2015, 42, 517–531. [Google Scholar] [CrossRef]
- Chen, J.; Wu, J.; Du, J. Real-time optimal energy management strategy for range extended electric bus in Harbin urban bus driving cycle. In Proceedings of the EVS28—The 28th International Electric Vehicle Symposium and Exhibition, Goyang, Republic of Korea, 3–6 May 2015. [Google Scholar]
- You, Y.K.; PI, J.M.; Park, D.H.; Kim, H.S. Development Of Driving Control Strategy For A Range-Extended Electric Vehicle Considering Route Information And Driver Aggression. In Proceedings of the FISITA 2016 World Automotive Congress, Busan, Republic of Korea, 26–30 September 2016. [Google Scholar]
- Chen, B.C.; Guan, J.C.; Li, J.H. Adaptive power management control of range extended electric vehicle. Energy Procedia 2014, 61, 67–70. [Google Scholar] [CrossRef][Green Version]
- Barillas, J.K.; Li, J.; Günther, C.; Danzer, M.A. A comparative study and validation of state estimation algorithms for Li-ion batteries in battery management systems. Appl. Energy 2015, 155, 455–462. [Google Scholar] [CrossRef]
- Bowkett, M.; Thanapalan, K.; Stockley, T.; Hathway, M.; Williams, J. Design and Implementation of an Optimal Battery Management System for Hybrid Electric Vehicles. In Proceedings of the 19th International Conference on Automation and Computing, London, UK, 13–14 September 2013. [Google Scholar]
- Jin, R.; Chen, W.; Simpson, T.W. Comparative studies of metamodelling techniques under multiple modelling criteria. Struct. Multidiscip. Optim. 2001, 23, 1–13. [Google Scholar] [CrossRef]
- Pfrommer, J.; Zimmerling, C.; Liu, J.; Karger, L.; Henning, F.; Beyerer, J. Optimization of manufacturing processes parameters using deep neural networks as surrogate models. Procedia CIRP 2018, 72, 426–431. [Google Scholar] [CrossRef]
- Mattarelli, E.; Rinaldini, C.; Baldini, P. Modeling and Experimental Investigation of a 2-Stroke GDI Engine for Range Extender Applications. SAE Tech. Paper 2014, 1, 1672. [Google Scholar]
- Abis, A.; Winkler, F.; Schwab, C.; Kirchberger, R.; Eichlseder, H. An Innovative Two-Stroke Twin-Cylinder Engine Layout for Range Extending Application. In Proceedings of the JSAE/SAE 2013 Small Engine Technology Conference, Taipei, China, 8–10 October 2013; Volume 13. [Google Scholar]
- Bayindir, K.Ç.; Gözüküçük, M.A.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Govindswamy, K.; Tomazic, D.; Genender, P.; Schuermann, G. The NVH Behavior of Internal Combustion Engines used in Range Extended Electric Vehicles. SAE Tech. Paper 2013, 1, 2002. [Google Scholar]
- Trattner, A.; Pertl, P.; Schmidt, S.; Sato, T. Novel Range Extender Concepts for 2025 with Regard to Small Engine Technologies. SAE Int. J. Altern. Powertrains 2012, 1, 566–583. [Google Scholar]
- Wang, H.; Huang, Y.; Khajepour, A.; Song, Q. Model predictive control-based energy management strategy for a series hybrid electric tracked vehicle. Appl. Energy 2016, 182, 105–114. [Google Scholar] [CrossRef]
- Guo, R.; Cao, C.; Mi, Y. Experimental Research on Powertrain NVH of Range-extended Electric Vehicle. SAE Tech. Paper 2015, 1, 43. [Google Scholar]
- Guo, R.; Cao, C.; Mi, Y. NVH Performance of Accessories in Range-Extended Electric Vehicle. SAE Tech. Paper 2015, 1, 0040. [Google Scholar]
- Pischinger, M.; Tomazic, D.; Wittek, K.; Esch, H. A Low NVH Range-Extender Application with a Small V-2 Engine—Based on a New Vibration Compensation System. SAE Tech. Paper 2012, 32, 81. [Google Scholar]
- Kostopoulos, E.D.; Spyropoulos, G.C.; Kaldellis, J.K. Real-world study for the optimal charging of electric vehicles. Energy Rep. 2020, 6, 418–426. [Google Scholar] [CrossRef]
- Available online: http://www.rapidform.com (accessed on 3 May 2020).
- Tabbache, B.; Djebarri, S.; Kheloui, A.; Benbouzid, M. A Power Presizing Methodology for Electric Vehicle Traction Motors. Int. Rev. Model. Simul. 2013, 6, 29–32. [Google Scholar]
- Wang, W.; Yu, Q.; Cao, D.; Lin, C.; Sun, F. A Stochastic Model Predictive Control Strategy for Extended Range Electric Vehicle. Energy Procedia 2016, 88, 833–839. [Google Scholar] [CrossRef]
- Olsson, A.; Sandberg, G.; Dahlblom, O. On Latin hypercube sampling for structural reliability analysis. Struct. Saf. 2003, 25, 47–68. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. A comprehensive review of on-board State-of-Available-Power prediction techniques for lithium-ion batteries in electric vehicles. J. Power Sources 2016, 329, 123–137. [Google Scholar] [CrossRef]
- Kang, L.; Zhao, X.; Ma, J. A new neural network model for the state-of-charge estimation in the battery degradation process. Appl. Energy 2014, 121, 20–27. [Google Scholar] [CrossRef]
- Sun, F.; Xiong, R.; He, H. A systematic state-of-charge estimation framework for multi-cell battery pack in electric vehicles using bias correction technique. Appl. Energy 2016, 162, 1399–1409. [Google Scholar] [CrossRef]
- Tong, S.; Lacap, J.H.; Park, J.W. Battery state of charge estimation using a load-classifying neural network. J. Energy Storage 2016, 7, 236–243. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Xu, J.; Gong, X.; You, C. Energy Management for a Power-Split Plug-in Hybrid Electric Vehicle Based on Dynamic Programming and Neural Networks. IEEE Trans. Veh. Technol. 2014, 63, 1567–1580. [Google Scholar] [CrossRef]
- Moreno, J.; Ortúzar, M.E.; Dixon, J.W. Energy-Management System for a Hybrid Electric Vehicle, Using Ultracapacitors and Neural Networks. IEEE Trans. Ind. Electron. 2006, 53, 614–623. [Google Scholar] [CrossRef]
- MathWorks. Neural Network. Available online: https://www.mathworks.com/discovery/neural-network.html. (accessed on 11 March 2022).
- Zhang, J.R.; Zhang, J.; Lok, T.M.; Lyu, M.R. A hybrid particle swarm optimization–back-propagation algorithm for feedforward neural network training. Appl. Math. Comput. 2007, 185, 1026–1037. [Google Scholar] [CrossRef]
- Shahriari, M.; Pardo, D.; Moser, B.; Sobieczky, F. A Deep Neural Network as Surrogate Model for Forward Simulation of Borehole Resistivity Measurements. Procedia Manuf. 2020, 42, 235–238. [Google Scholar] [CrossRef]
- Wang, G.G.; Shan, S. Review of Metamodeling Techniques in Support of Engineering Design Optimization. J. Mech. Des. Trans. ASME 2007, 129, 370–380. [Google Scholar] [CrossRef]
- Bulut, E.; Albak, E.İ.; Sevilgen, G.; Öztürk, F. Prediction and optimization of the design decisions of liquid cooling systems of battery modules using artificial neural networks. Int. J. Energy Res. 2022, 46, 7293–7308. [Google Scholar] [CrossRef]
- Wang, J.; Wan, W. Optimization of Fermentative Hydrogen Production Process Using Genetic Algorithm Based on Neural Network and Response Surface Methodology. Int. J. Hydrog. Energy 2009, 34, 255–261. [Google Scholar] [CrossRef]
- Abrougui, K.; Gabsi, K.; Mercatoris, B.; Khemis, C.; Amami, R.; Chehaibi, S. Prediction of Organic Potato Yield Using Tillage Systems and Soil Properties by Artificial Neural Network (ANN) and Multiple Linear Regressions (MLR). Soil Tillage Res. 2019, 190, 202–208. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).