
Optimized-Based Fault-Tolerant Control of an Electro-Hydraulic System with Disturbance Rejection



Abstract
:1. Introduction
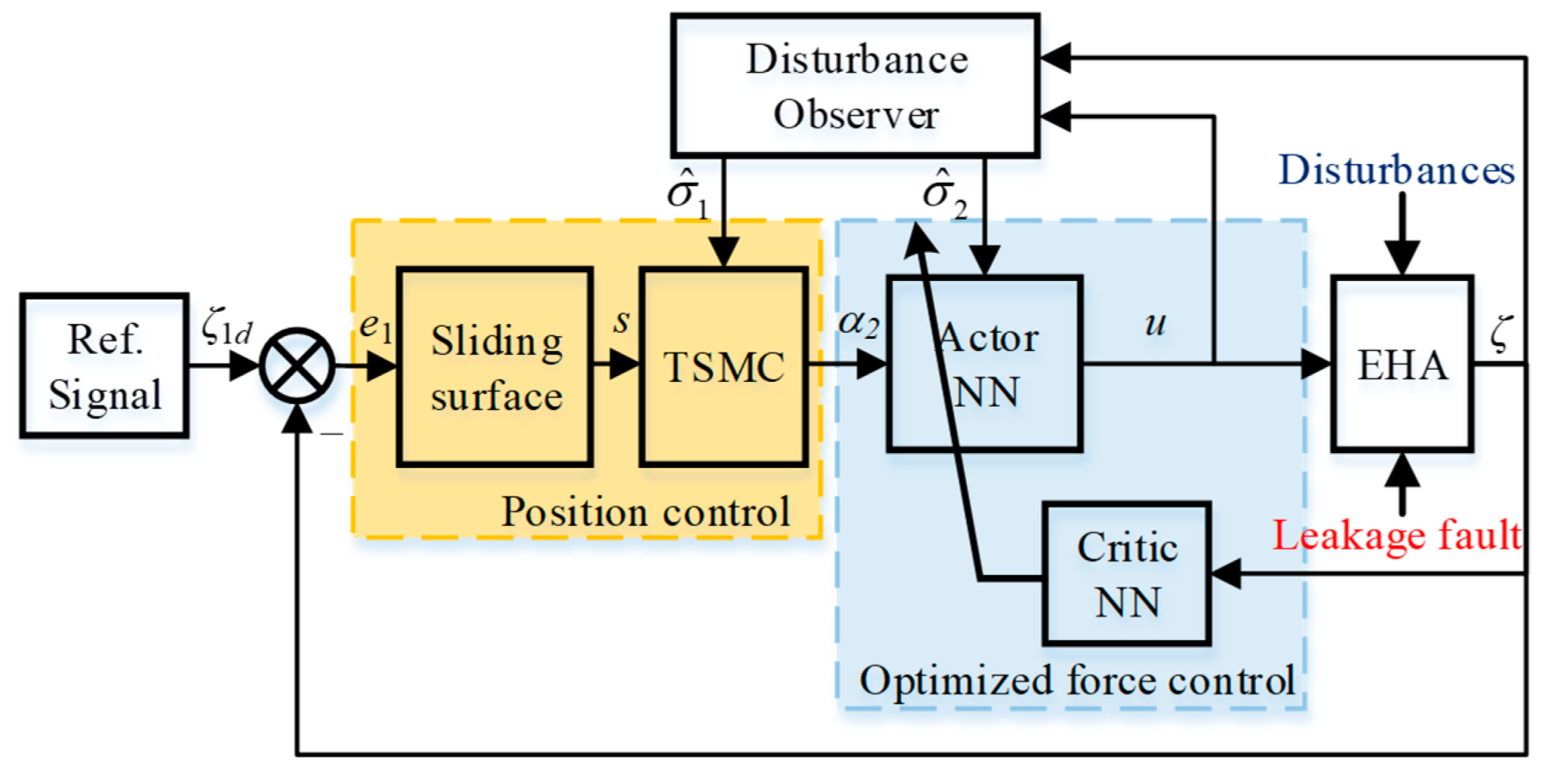
- To effectively attenuate the influences of the disturbances and the fault in the EHA system, the combination of DOs, a nonsingular terminal sliding-mode (NTSMC) scheme for the position tracking control loop, and an optimized force control method is developed.
- The system stability and asymptotic tracking error convergence is warranted by Lyapunov theory, and the effectiveness and feasibility of the suggested methodology are verified based on the simulation results.
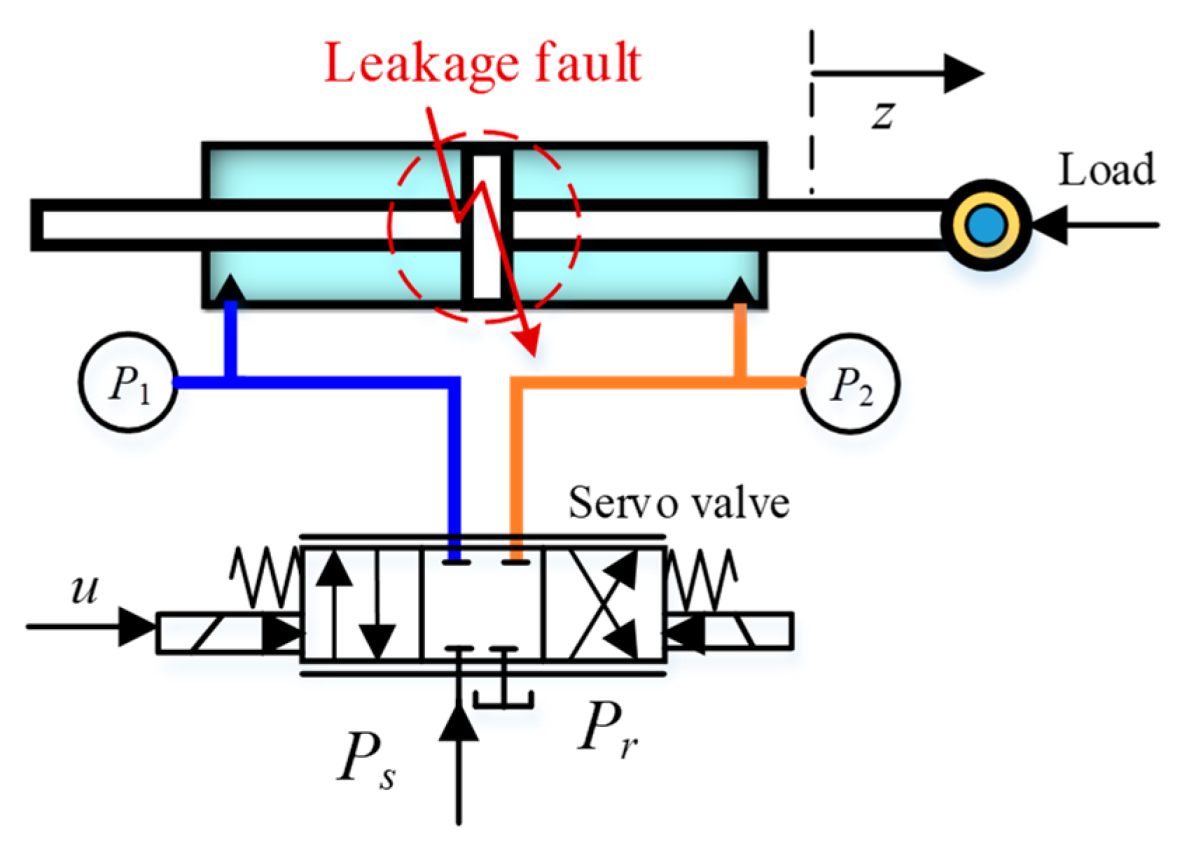
2. System Descriptions and Preliminaries
- a.
- The tracking reference signal, its derivative, and all states are bounded.
- b.
- Under normal working conditions, the pressures, andare sufficiently smaller than.
- c.
- There exist upper bounds forand their derivatives, such that they satisfy, where,are positive constants.
3. Proposed Control Scheme
3.1. Disturbance Observer-Based NTSMC Design
3.2. Optimal Force Control Design
4. Simulation Results
4.1. Simulation Setup
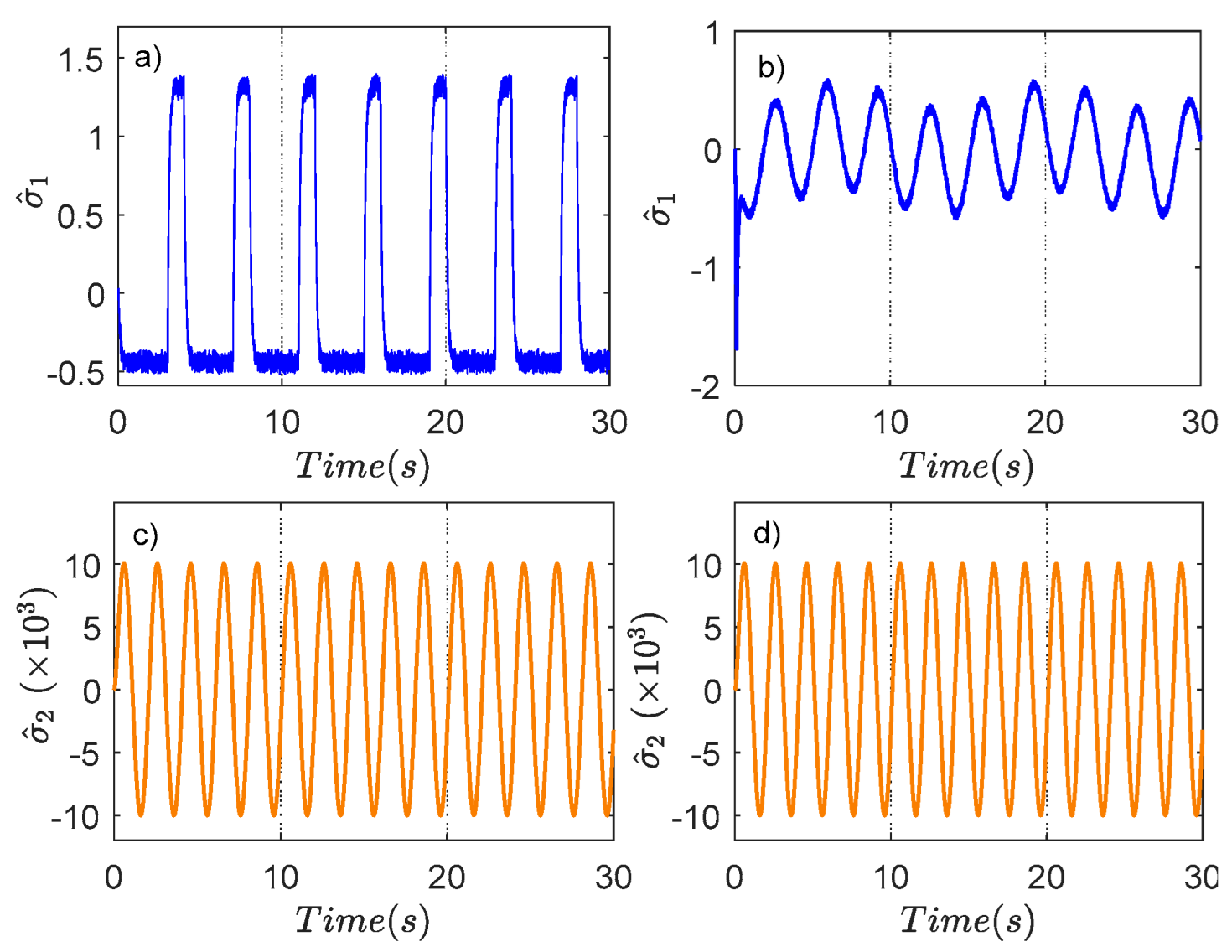
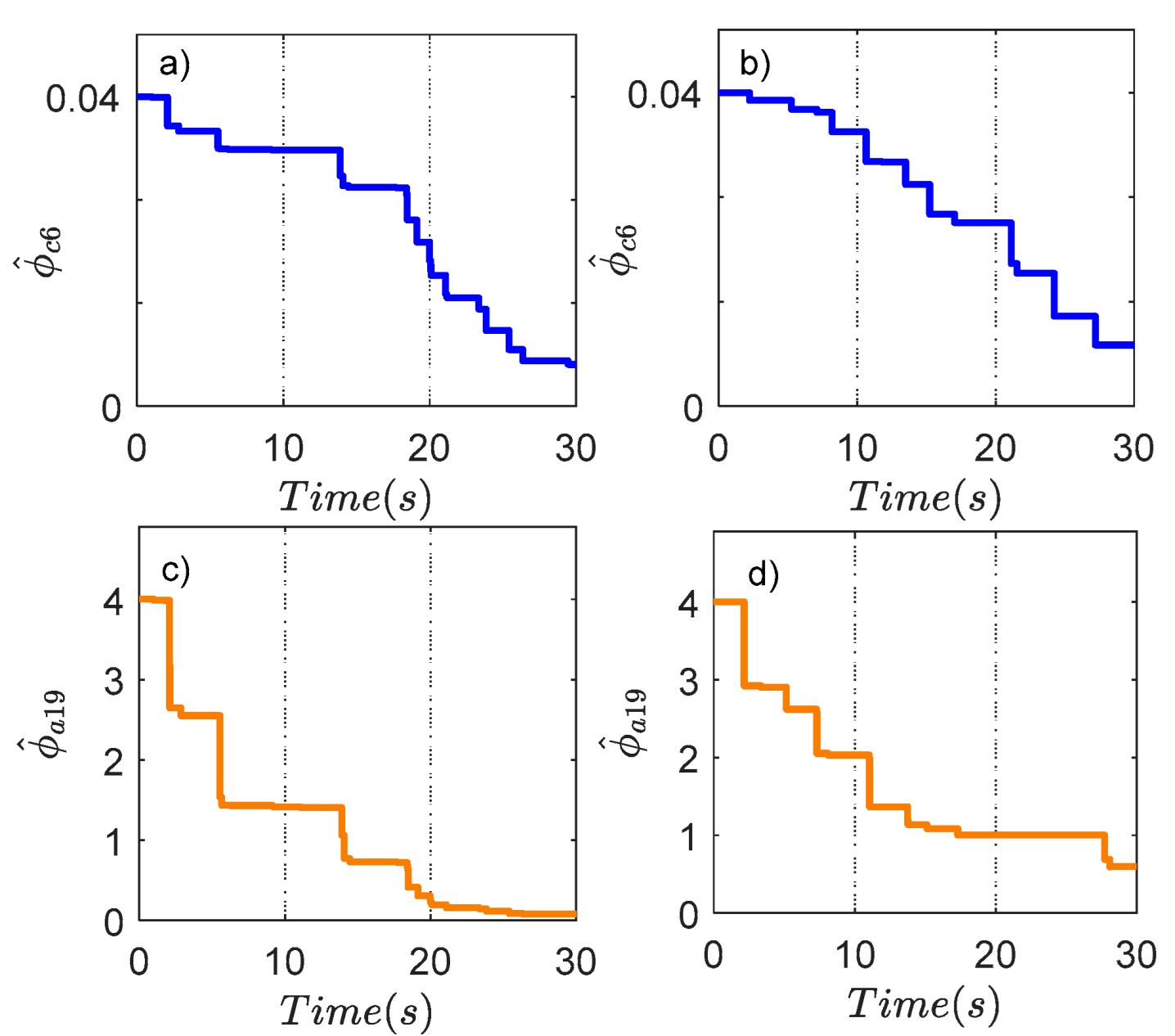
4.2. Evaluation Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, Z.; Deng, W.; Shen, H.; Yao, J. Extended-State-Observer-Based Adaptive Prescribed Performance Control for Hydraulic Systems With Full-State Constraints. IEEE/ASME Trans. Mechatron. 2022, 1–11. [Google Scholar] [CrossRef]
- Truong, H.V.A.; Tran, D.T.; To, X.D.; Ahn, K.K.; Jin, M. Adaptive Fuzzy Backstepping Sliding Mode Control for a 3-DOF Hydraulic Manipulator with Nonlinear Disturbance Observer for Large Payload Variation. Appl. Sci. 2019, 9, 3290. [Google Scholar] [CrossRef]
- Shen, W.; Liu, X.; Su, X. High-Precision Position Tracking Control of Electro-hydraulic Servo Systems Based on an Improved Structure and Desired Compensation. Int. J. Control Autom. Syst. 2021, 19, 3622–3630. [Google Scholar] [CrossRef]
- Nedić Pršić, N.D.; Fragassa, C.; Stojanović, V.; Pavlovic, A. Simulation of hydraulic check valve for forestry equipment. Int. J. Heavy Veh. Syst. 2017, 24, 260–276. [Google Scholar] [CrossRef]
- Xu, Z.; Qi, G.; Liu, Q.; Yao, J. Output Feedback Disturbance Rejection Control for Full-State Constrained Hydraulic Systems with Guaranteed Tracking Performance. Appl. Math. Model. 2022, 111, 332–348. [Google Scholar] [CrossRef]
- Yang, X.; Yao, J.; Deng, W. Output feedback adaptive super-twisting sliding mode control of hydraulic systems with disturbance compensation. ISA Trans. 2021, 109, 175–185. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Wang, Y.; Yang, X.; Chen, J. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal. Proc. 2021, 158, 107769. [Google Scholar] [CrossRef]
- Yao, Z.; Yao, J.; Sun, W. Adaptive RISE Control of Hydraulic Systems With Multilayer Neural-Networks. IEEE Trans. Ind. Electron. 2019, 66, 8638–8647. [Google Scholar] [CrossRef]
- Shanbhag, V.V.; Meyer, T.J.J.; Caspers, L.W.; Schlanbusch, R. Failure Monitoring and Predictive Maintenance of Hydraulic Cylinder—State-of-the-Art Review. IEEE/ASME Trans. Mechatron. 2021, 26, 3087–3103. [Google Scholar] [CrossRef]
- Phan, V.D.; Ahn, K.K. Observer-based Fault-Tolerant Control of an Electro-Hydraulic Actuator with mismatched disturbance. In Proceedings of the 24th International Conference on Mechatronics Technology (ICMT), Singapore, 18–22 December 2021. [Google Scholar]
- Zhu, F.; Shan, Y.; Tang, Y. Actuator and Sensor Fault Detection and Isolation for Uncertain Switched Nonlinear System Based on Sliding Mode Observers. Int. J. Control Autom. Syst. 2021, 19, 3075–3086. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Tomizuka, M. High-Gain-Observer-Based Integral Sliding Mode Control for Position Tracking of Electrohydraulic Servo Systems. IEEE/ASME Trans. Mechatron. 2017, 22, 2695–2704. [Google Scholar] [CrossRef]
- Xu, Z.; Li, X.; Stojanovic, V. Exponential stability of nonlinear state-dependent delayed impulsive systems with applications. Nonlinear Anal. Hybrid Syst. 2021, 42, 101088. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Q.; Xu, B.; Dong, C. Back-stepping Fault-tolerant Control for Morphing Aircraft Based on Fixed-time Observer. Int. J. Control Autom. Syst. 2021, 19, 3924–3936. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Extended-State-Observer-Based Adaptive Control of Electrohydraulic Servomechanisms Without Velocity Measurement. IEEE/ASME Trans. Mechatron. 2020, 25, 1151–1161. [Google Scholar] [CrossRef]
- Truong, H.V.A.; Trinh, H.A.; Tran, D.T.; Ahn, K.K. A Robust Observer for Sensor Faults Estimation on n-DOF Manipulator in Constrained Framework Environment. IEEE Access 2021, 9, 88439–88451. [Google Scholar] [CrossRef]
- Phan, V.D.; Vo, C.P.; Dao, H.V.; Ahn, K.K. Robust fault-tolerant control of an electro-hydraulic actuator with a novel nonlinear unknown input observer. IEEE Access 2021, 9, 30750–30760. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Guo, J. Neural Network Observer Based Consensus Control of Unknown Nonlinear Multi-agent Systems with Prescribed Performance and Input Quantization. Int. J. Control Autom. Syst. 2021, 19, 1944–1952. [Google Scholar] [CrossRef]
- Li, K.; Li, Y. Adaptive Fuzzy Finite-time Dynamic Surface Control for High-order Nonlinear System with Output Constraints. Int. J. Control Autom. Syst. 2020, 19, 112–123. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Stojanovic, V.; Cheng, P.; He, S.; Luan, X.; Liu, F. Asynchronous Fault Detection for Interval Type-2 Fuzzy Nonhomogeneous Higher Level Markov Jump Systems with Uncertain Transition Probabilities. IEEE Trans. Fuzzy Syst. 2022, 30, 2487–2499. [Google Scholar] [CrossRef]
- Phan, V.D.; Vo, C.P.; Dao, H.V.; Ahn, K.K. Actuator Fault-Tolerant Control for an Electro-Hydraulic Actuator Using Time Delay Estimation and Feedback Linearization. IEEE Access 2021, 9, 107111–107123. [Google Scholar] [CrossRef]
- Liu, J.Y.; Zeng, Q.; Tong, S.; Chen, C.L.P.; Liu, L. Actuator Failure Compensation-Based Adaptive Control of Active Suspension Systems With Prescribed Performance. IEEE Trans. Ind. Electron. 2020, 67, 7044–7053. [Google Scholar] [CrossRef]
- Dao, H.V.; Tran, D.T.; Ahn, K.K. Active Fault Tolerant Control System Design for Hydraulic Manipulator with Internal Leakage Faults based on Disturbance Observer and Online Adaptive Identification. IEEE Access 2021, 9, 23850–23862. [Google Scholar] [CrossRef]
- Phan, V.D.; Ahn, K.K. Disturbance Observer-based Adaptive Fault-Tolerant Control of an Electro-Hydraulic Actuator with Output Constraint. In Proceedings of the 13th Asian Control Conference, Jeju Island, Korea, 4–7 May 2022. [Google Scholar]
- Yang, X.; Li, B.; Wen, G. Adaptive Neural Network Optimized Control Using Reinforcement Learning of Critic-Actor Architecture for a Class of Non-Affine Nonlinear Systems. IEEE Access 2021, 9, 141758–141765. [Google Scholar] [CrossRef]
- Wen, G.; Chen, C.L.P.; Ge, S.S.; Yang, H.; Liu, X. Optimized Adaptive Nonlinear Tracking Control Using Actor–Critic Reinforcement Learning Strategy. IEEE Trans. Ind. Inform. 2019, 15, 4969–4977. [Google Scholar] [CrossRef]
- Cui, J.; Pan, Y.; Xue, H.; Tan, L. Simplified optimized finite-time containment control for a class of multi-agent systems with actuator faults. Nonlinear Dyn. 2022, 109, 2799–2816. [Google Scholar] [CrossRef]
- Sun, Y.; Yuan, B.; Zhang, Y.; Zheng, W.; Xia, Q.; Tang, B.; Zhou, X. Research on Action Strategies and Simulations of DRL and MCTS-based Intelligent Round Game. Int. J. Control Autom. Syst. 2021, 19, 2984–2998. [Google Scholar] [CrossRef]
- Ouyang, Y.; Sun, C.; Dong, L. Actor-critic learning based coordinated control for a dual-arm robot with prescribed performance and unknown backlash-like hysteresis. ISA Trans. 2022, 126, 1–13. [Google Scholar] [CrossRef]
- Simorgh, A.; Razminia, A.; Mobayen, S.; Baleanu, D. Optimal Control of a MIMO Bioreactor System Using Direct Approach. Int. J. Control Autom. Syst. 2021, 19, 1159–1174. [Google Scholar] [CrossRef]
- Wang, N.; Gao, Y.; Zhao, H.; Ahn, C.K. Reinforcement Learning-Based Optimal Tracking Control of an Unknown Unmanned Surface Vehicle. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3034–3045. [Google Scholar] [CrossRef]
- Guo, Q. Optimal Robust Control of Electro-Hydraulic System Based on Hamilton-Jacobi-Bellman Solution With Backstepping Iteration. IEEE Trans. Control Syst. Technol. 2022, 1–8. [Google Scholar] [CrossRef]
- He, W.; Gao, H.; Zhou, C.; Yang, C.; Li, Z. Reinforcement Learning Control of a Flexible Two-Link Manipulator: An Experimental Investigation. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 1–11. [Google Scholar] [CrossRef]
- Wen, G.; Chen, C.L.P.; Ge, S.S. Simplified Optimized Backstepping Control for a Class of Nonlinear Strict-Feedback Systems With Unknown Dynamic Functions. IEEE Trans. Cybern. 2021, 51, 4567–4580. [Google Scholar] [CrossRef] [PubMed]
- Wen, G.; Ge, S.S.; Tu, F. Optimized Backstepping for Tracking Control of Strict-Feedback Systems. IEEE Trans. Neural Netw. Learn. Syst 2018, 29, 3850–3862. [Google Scholar]
- Yang, G.; Yao, J.; Le, G.; Ma, D. Adaptive integral robust control of hydraulic systems with asymptotic tracking. Mechatronics 2016, 40, 78–86. [Google Scholar] [CrossRef]
- Yao, J.; Yang, G.; Ma, D. Internal Leakage Fault Detection and Tolerant Control of Single-Rod Hydraulic Actuators. Math. Probl. Eng. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Phan, V.D.; Truong, H.V.A.; Ahn, K.K. Actuator failure compensation-based command filtered control of electro-hydraulic system with position constraint. ISA Trans. 2022. [Google Scholar] [CrossRef]
- Ge, S.S.; Wang, C. Adaptive neural control of uncertain MIMO nonlinear systems. IEEE Trans. Neural Netw. 2004, 15, 674–692. [Google Scholar] [CrossRef]
- Wang, L.; Chai, T.; Zhai, L. Neural-Network-Based Terminal Sliding-Mode Control of Robotic Manipulators Including Actuator Dynamics. IEEE Trans. Ind. Electron. 2009, 56, 3296–3304. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-Gain Disturbance Observer-Based Backstepping Control With Output Tracking Error Constraint for Electro-Hydraulic Systems. IEEE Trans. Control Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Ba, D.X.; Dinh, T.Q.; Bae, J.; Ahn, K.K. An Effective Disturbance-Observer-Based Nonlinear Controller for a Pump-Controlled Hydraulic System. IEEE/ASME Trans. Mechatron. 2020, 25, 32–43. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems With Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Value | Unit |
|---|---|---|
| βe | 1.25 × 103 | MPa |
| ks | 3.2 × 10−8 | m3/s/V/Pa−1/2 |
| kb | 450 | Ns/m |
| m | 4.5 | kg |
| A | 4 × 10−4 | m2 |
| 16 | MPa | |
| Vc | 6 × 10−5 | m3 |
| 0.1 | MPa |
| Controller | DBC | BSMCDO | Proposed | |
|---|---|---|---|---|
| Ramp | eRMS | 0.1027 | 0.0637 | 0.0351 |
| ea | 0.1103 | 0.0726 | 0.0298 | |
| emax | 0.2644 | 0.2381 | 0.1954 | |
| VPS | eRMS | 0.0986 | 0.0727 | 0.0278 |
| ea | 0.1009 | 0.0869 | 0.0201 | |
| emax | 0.1542 | 0.1194 | 0.0980 |
| Controller | DBC | BSMCDO | Proposed | |
|---|---|---|---|---|
| Ramp | eRMS | 0.1190 | 0.1024 | 0.0838 |
| ea | 0.1201 | 0.1106 | 0.0778 | |
| emax | 0.4198 | 0.2684 | 0.2106 | |
| VPS | eRMS | 0.1595 | 0.0857 | 0.0442 |
| ea | 0.1768 | 0.0912 | 0.0357 | |
| emax | 0.1986 | 0.1458 | 0.1260 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, V.D.; Ahn, K.K. Optimized-Based Fault-Tolerant Control of an Electro-Hydraulic System with Disturbance Rejection. Appl. Sci. 2022, 12, 9197. https://doi.org/10.3390/app12189197
Phan VD, Ahn KK. Optimized-Based Fault-Tolerant Control of an Electro-Hydraulic System with Disturbance Rejection. Applied Sciences. 2022; 12(18):9197. https://doi.org/10.3390/app12189197
Chicago/Turabian StylePhan, Van Du, and Kyoung Kwan Ahn. 2022. "Optimized-Based Fault-Tolerant Control of an Electro-Hydraulic System with Disturbance Rejection" Applied Sciences 12, no. 18: 9197. https://doi.org/10.3390/app12189197
APA StylePhan, V. D., & Ahn, K. K. (2022). Optimized-Based Fault-Tolerant Control of an Electro-Hydraulic System with Disturbance Rejection. Applied Sciences, 12(18), 9197. https://doi.org/10.3390/app12189197