
Understanding Balance Control in the Context of Riding a Personal Mobility Device


Abstract
1. Introduction
2. Methods
2.1. Participants
2.2. Apparatus
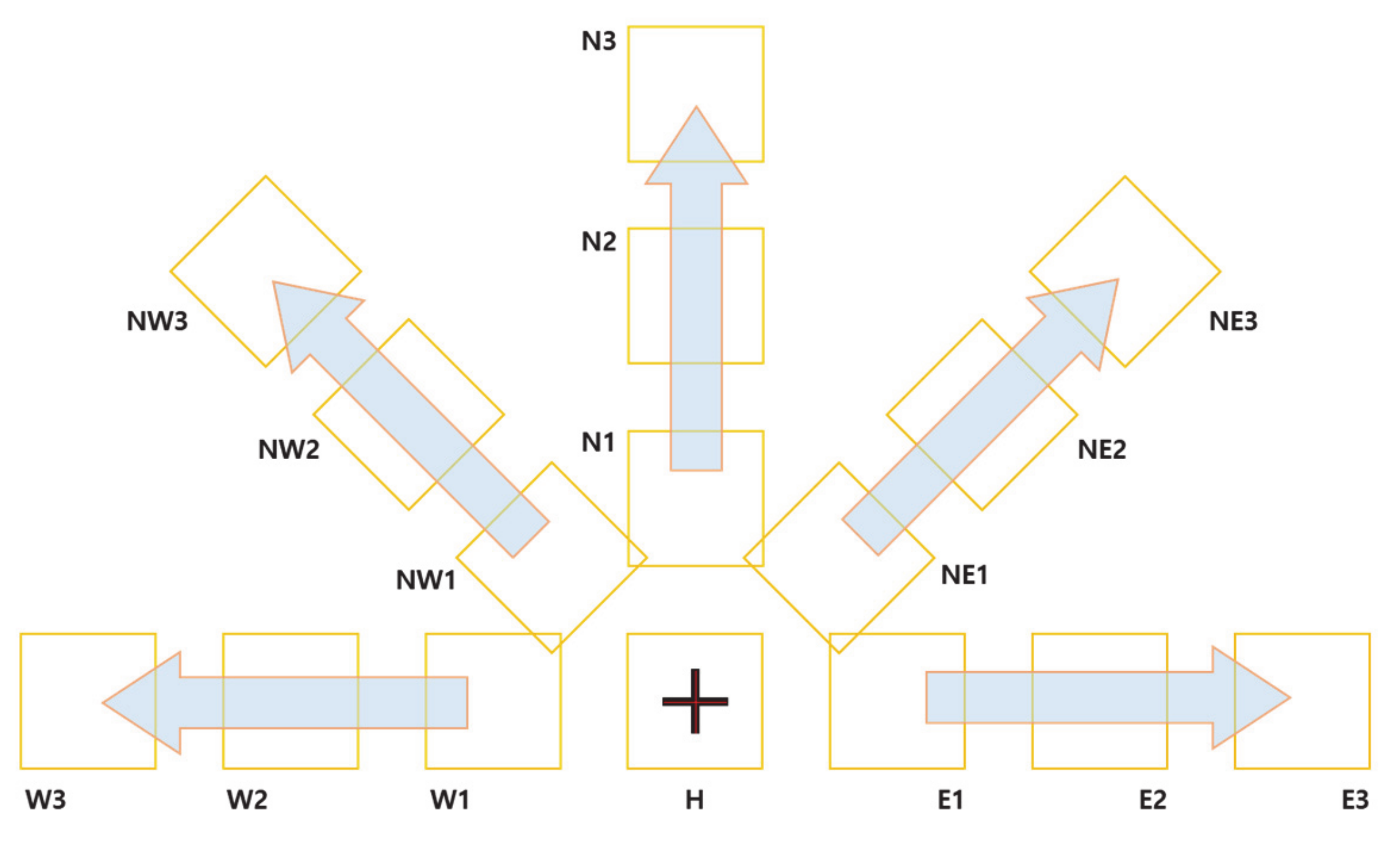
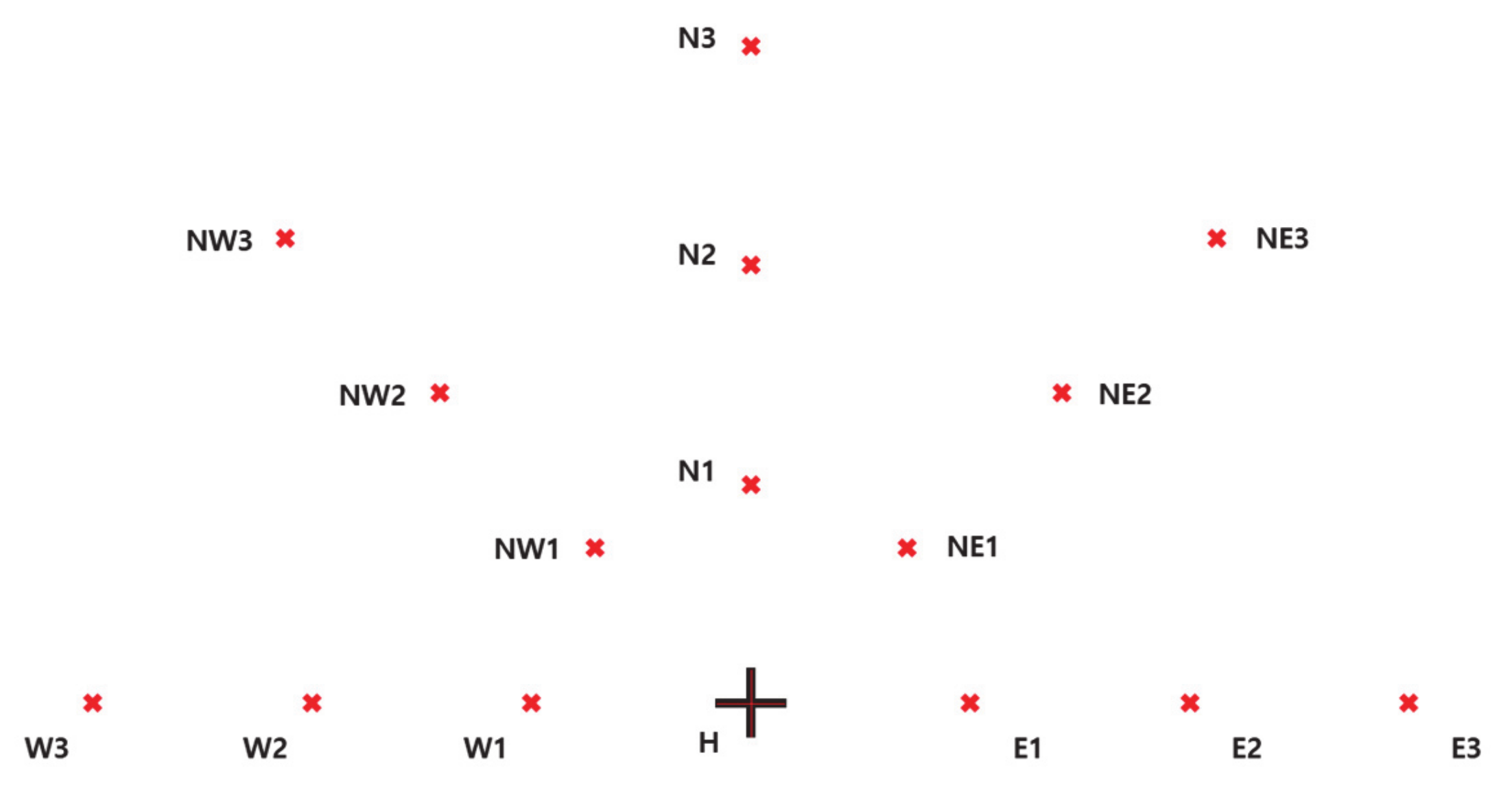
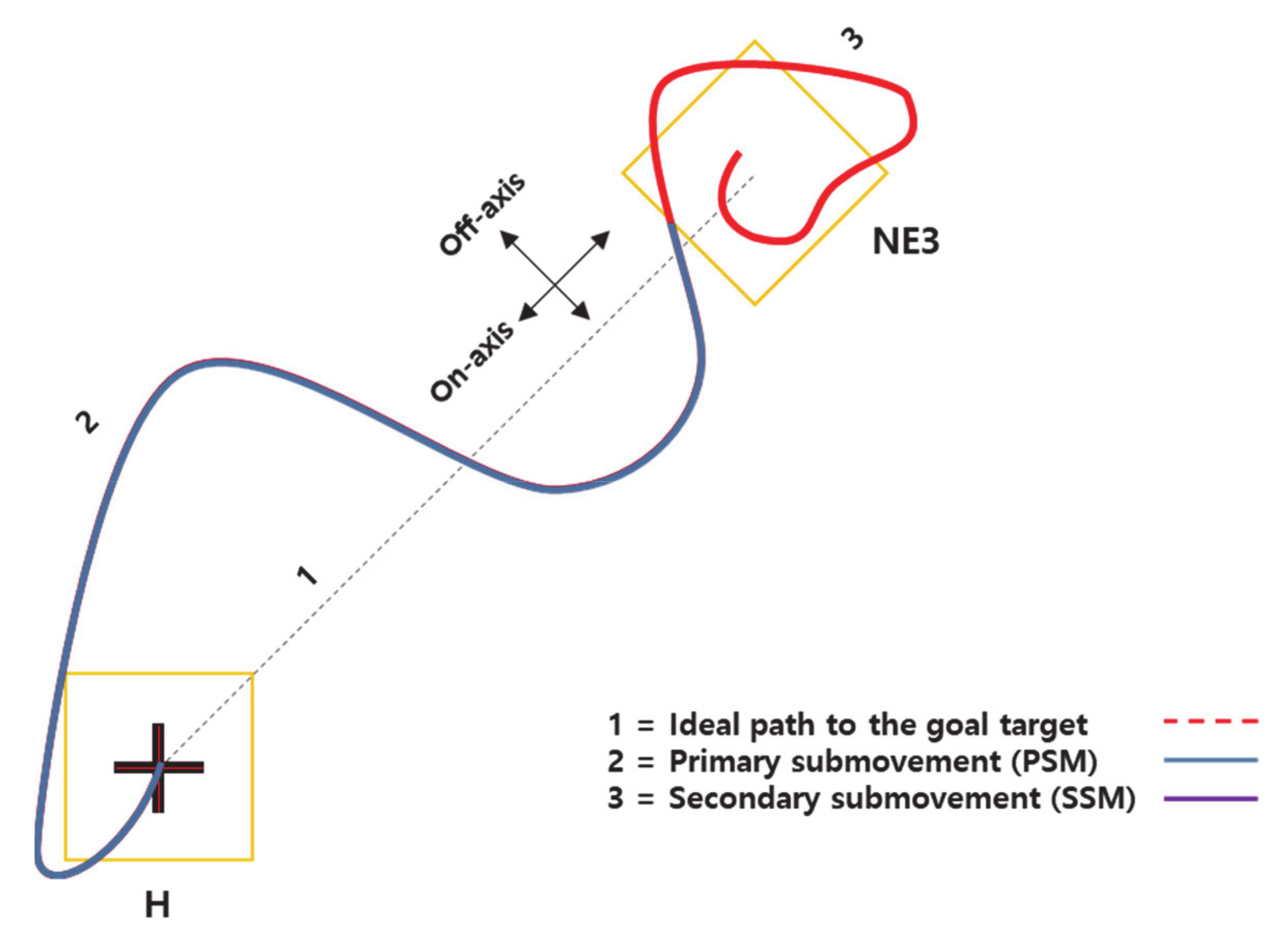
2.3. Tasks
2.4. Procedure
2.5. Measures
2.5.1. Weight-Shifting Task
- Time measures
- Fluency measures
- Accuracy measures
- Subjective measures
2.5.2. Balance Task
- Time-domain measures
- Subjective measures
2.6. Analysis
3. Results
3.1. Weight-Shifting Task
3.1.1. Time Measures
3.1.2. Fluency Measures
3.1.3. Accuracy Measures
3.1.4. Subjective Measures
3.2. Balance Task
3.2.1. Time-Domain Measures
3.2.2. Subjective Measures
4. Discussion
4.1. Performance and Pattern of the Targeted Weight Shifting
4.1.1. Effects of Target Distance on the Weight-Shifting Performance
4.1.2. Effects of Target Direction on the Weight-Shifting Performance
4.1.3. Interaction Effects of Target Distance and Direction on the Weight-Shifting Performance
4.1.4. Subjective Measures of the Weight Shifting
4.2. Performance of the Balance Control
4.2.1. Effects of Target Distance and Direction on the Balance Control
4.2.2. Subjective Assessments of the Balance Control
4.3. Application to the SPMD
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| Questions | Item Scale |
|---|---|
|
|
| |
| |
|
| Questions | Item Scale |
|---|---|
|
|
| |
| |
|
References
- Ulrich, K.T. Estimating the technology frontier for personal electric vehicles. Transp. Res. Part C Emerg. Technol. 2005, 13, 448–462. [Google Scholar] [CrossRef]
- Liu, R.; Parthasarathy, R. Urban Street: Is There Room for Segway (Trademark) Human Transporter (HT)? In Proceedings of the 2nd Urban Street Symposium: Uptown, Downtown, or Small Town: Designing Urban Streets That Work, Anaheim, CA, USA, 28–30 July 2003. [Google Scholar]
- Shaheen, S.A.; Finson, R. Bridging the last mile: A study of the behavioral, institutional, and economic potential of the segway human transporter. Transp. Res. Board 2003, 10, 108–113. [Google Scholar]
- Dias, C.; Nishiuchi, H.; Hyoudo, S.; Todoroki, T. Simulating interactions between pedestrians, Segway riders and cyclists in shared spaces using social force model. Transp. Res. Procedia 2018, 34, 91–98. [Google Scholar] [CrossRef]
- Dowling, R.; Irwin, J.D.; Faulks, I.J.; Howitt, R. Use of personal mobility devices for first-and-last mile travel: The Macquarie-Ryde trial. In Proceedings of the 2015 Australasian Road Safety Conference, Gold Coast, Australia, 14–16 October 2015. [Google Scholar]
- Hasegawa, Y.; Dias, C.; Iryo-Asano, M.; Nishiuchi, H. Modeling pedestrians’ subjective danger perception toward personal mobility vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 56, 256–267. [Google Scholar] [CrossRef]
- Siracuse, B.L.; Ippolito, J.A.; Gibson, P.D.; Beebe, K.S. Hoverboards: A new cause of pediatric morbidity. Injury 2017, 48, 1110–1114. [Google Scholar] [CrossRef]
- Pollock, A.S.; Durward, B.R.; Rowe, P.J.; Paul, J.P. What is balance? Clin. Rehabil. 2000, 14, 402–406. [Google Scholar] [CrossRef]
- Winter, D.A. Human balance and posture control during standing and walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Holbein, M.A.; Chaffin, D.B. Stability limits in extreme postures: Effects of load positioning, foot placement, and strength. Hum. Factors 1997, 39, 456–468. [Google Scholar] [CrossRef]
- Horak, F.B. Clinical assessment of balance disorders. Gait Posture 1997, 6, 76–84. [Google Scholar] [CrossRef]
- Shumway-Cook, A.; Woollacott, M.H. Theories of motor control. In Motor Control: Theory and Practical Applications; Williams & Wilkins: Baltimore, MD, USA, 1995; Available online: https://lib.ugent.be/catalog/rug01:000390745 (accessed on 8 March 2021).
- Lafond, D.; Duarte, M.; Prince, F. Comparison of three methods to estimate the center of mass during balance assessment. J. Biomech. 2004, 37, 1421–1426. [Google Scholar] [CrossRef]
- Winter, D.A.; Patla, A.E.; Frank, J.S. Assessment of balance control in humans. Med. Prog. Technol. 1990, 16, 31–51. [Google Scholar] [PubMed]
- Palmieri, R.M.; Ingersoll, C.D.; Stone, M.B.; Krause, B.A. Center-of-pressure parameters used in the assessment of postural control. J. Sport Rehabil. 2002, 11, 51–66. [Google Scholar] [CrossRef]
- Riemann, B.L.; Guskiewicz, K.M.; Shields, E.W. Relationship between clinical and forceplate measures of postural stability. J. Sport Rehabil. 1999, 8, 71–82. [Google Scholar] [CrossRef]
- DiDomenico, A.; Nussbaum, M.A. Interactive effects of mental and postural demands on subjective assessment of mental workload and postural stability. Saf. Sci. 2005, 43, 485–495. [Google Scholar] [CrossRef]
- Hernandez, M.E.; Ashton-Miller, J.A.; Alexander, N.B. Age-related changes in speed and accuracy during rapid targeted center of pressure movements near the posterior limit of the base of support. Clin. Biomech. 2012, 27, 910–916. [Google Scholar] [CrossRef]
- Hernandez, M.E.; Ashton-Miller, J.A.; Alexander, N.B. The effect of age, movement direction, and target size on the maximum speed of targeted COP movements in healthy women. Hum. Mov. Sci. 2012, 31, 1213–1223. [Google Scholar] [CrossRef]
- Kasahara, S.; Saito, H.; Anjiki, T.; Osanai, H. The effect of aging on vertical postural control during the forward and backward shift of the center of pressure. Gait Posture 2015, 42, 448–454. [Google Scholar] [CrossRef]
- Tucker, M.G.; Kavanagh, J.J.; Barrett, R.S.; Morrison, S. Age-related differences in postural reaction time and coordination during voluntary sway movements. Hum. Mov. Sci. 2008, 27, 728–737. [Google Scholar] [CrossRef]
- Zultowski, I.; Aruin, A. Carrying loads and postural sway in standing: The effect of load placement and magnitude. Work 2008, 30, 359–368. [Google Scholar]
- Jebelli, H.; Ahn, C.R.; Stentz, T.L. Fall risk analysis of construction workers using inertial measurement units: Validating the usefulness of the postural stability metrics in construction. Saf. Sci. 2016, 84, 161–170. [Google Scholar] [CrossRef]
- Pan, C.S.; Chiou, S.; Kau, T.-Y.; Bhattacharya, A.; Ammons, D. Effects of foot placement on postural stability of construction workers on stilts. Appl. Ergon. 2009, 40, 781–789. [Google Scholar] [CrossRef]
- Simeonov, P.I.; Hsiao, H.; Dotson, B.W.; Ammons, D.E. Control and perception of balance at elevated and sloped surfaces. Hum. Factors 2003, 45, 136–147. [Google Scholar] [CrossRef]
- Soangra, R.; Bhatt, H.; Rashedi, E. Effects of load carriage and surface inclination on linear and non-linear postural variability. Saf. Sci. 2018, 110, 427–437. [Google Scholar] [CrossRef]
- Holbein-Jenny, M.A.; McDermott, K.; Shaw, C.; Demchak, J. Validity of functional stability limits as a measure of balance in adults aged 23–73 years. Ergonomics 2007, 50, 631–646. [Google Scholar] [CrossRef]
- Juras, G.; Słomka, K.; Fredyk, A.; Sobota, G.; Bacik, B. Evaluation of the limits of stability (LOS) balance test. J. Hum. Kinet. 2008, 19, 39–52. [Google Scholar] [CrossRef]
- Spreitzer, L.; Perkins, J.; Ustinova, K.I. Challenging stability limits in old and young individuals with a functional reaching task. Am. J. Phys. Med. Rehabil. 2013, 92, 36–44. [Google Scholar] [CrossRef]
- de Vries, E.A.; Caljouw, S.R.; Coppens, M.J.M.; Postema, K.; Verkerke, G.J.; Lamoth, C.J.C. Differences between young and older adults in the control of weight shifting within the surface of support. PLoS ONE 2014, 9, e98494. [Google Scholar]
- Duarte, M.; Zatsiorsky, V.M. Effects of body lean and visual information on the equilibrium maintenance during stance. Exp. Brain Res. 2002, 146, 60–69. [Google Scholar] [CrossRef]
- Prado, J.M.; Dinato, M.C.M.; Duarte, M. Age-related difference on weight transfer during unconstrained standing. Gait Posture 2011, 33, 93–97. [Google Scholar] [CrossRef]
- Jongman, V.; Lamoth, C.J.C.; van Keeken, H.; Caljouw, S.R. Postural Control of Elderly: Moving to Predictable and Unpredictable Targets. Stud. Health Technol. Inform. 2012, 181, 93–97. [Google Scholar] [CrossRef]
- Prieto, T.E.; Myklebust, J.B.; Hoffmann, R.G.; Lovett, E.G.; Myklebust, B.M. Measures of postural steadiness: Differences between healthy young and elderly adults. IEEE Trans. Biomed. Eng. 1996, 43, 956–966. [Google Scholar] [CrossRef]
- Clark, S.; Rose, D.J.; Fujimoto, K. Generalizability of the limits of stability test in the evaluation of dynamic balance among older adults. Arch. Phys. Med. Rehabil. 1997, 78, 1078–1084. [Google Scholar] [CrossRef]
- Kennedy, M.W.; Bretl, T.; Schmiedeler, J.P. Interpreting lateral dynamic weight shifts using a simple inverted pendulum model. Gait Posture 2014, 40, 134–139. [Google Scholar] [CrossRef]
- Danion, F.; Duarte, M.; Grosjean, M. Fitts’ law in human standing: The effect of scaling. Neurosci. Lett. 1999, 277, 131–133. [Google Scholar] [CrossRef]
- Duarte, M.; Freitas, S.M.S.F. Speed–accuracy trade-off in voluntary postural movements. Motor Control 2005, 9, 180–196. [Google Scholar] [CrossRef]
- Karlsson, A.; Lanshammar, H. Analysis of postural sway strategies using an inverted pendulum model and force plate data. Gait Posture 1997, 5, 198–203. [Google Scholar] [CrossRef]
- Loram, I.D.; Lakie, M. Human balancing of an inverted pendulum: Position control by small, ballistic-like, throw and catch movements. J. Physiol. 2002, 540, 1111–1124. [Google Scholar] [CrossRef]
- Peterka, R.J. Postural control model interpretation of stabilogram diffusion analysis. Biol. Cybern. 2000, 82, 335–343. [Google Scholar] [CrossRef]
- Amin, D.J.; Herrington, L.C. The relationship between ankle joint physiological characteristics and balance control during unilateral stance. Gait Posture 2014, 39, 718–722. [Google Scholar] [CrossRef]
- Runge, C.F.; Shupert, C.L.; Horak, F.B.; Zajac, F.E. Ankle and hip postural strategies defined by joint torques. Gait Posture 1999, 10, 161–170. [Google Scholar] [CrossRef]
- Peters, M. Footedness: Asymmetries in foot preference and skill and neuropsychological assessment of foot movement. Psychol. Bull. 1988, 103, 179. [Google Scholar] [CrossRef] [PubMed]
- Sadeghi, H.; Allard, P.; Prince, F.; Labelle, H. Symmetry and limb dominance in able-bodied gait: A review. Gait Posture 2000, 12, 34–45. [Google Scholar] [CrossRef]
- Blaszczyk, J.W.; Hansen, P.D.; Lowe, D.L. Postural sway and perception of the upright stance stability borders. Perception 1993, 22, 1333–1341. [Google Scholar] [CrossRef] [PubMed]
- Riley, M.A.; Mitra, S.; Stoffregen, T.A.; Turvey, M.T. Influences of body lean and vision on unperturbed postural sway. Motor Control 1997, 1, 229–246. [Google Scholar] [CrossRef]
- Sullivan, L.M.; Weinberg, J.; Keaney, J.F., Jr. Common statistical pitfalls in basic science research. J. Am. Heart Assoc. 2016, 5, e004142. [Google Scholar] [CrossRef]
- Keselman, H.J.; Algina, J.; Kowalchuk, R.K. The analysis of repeated measures designs: A review. Br. J. Math. Stat. Psychol. 2001, 54, 1–20. [Google Scholar] [CrossRef]



| Type of Task | Classification | Outcome Measures |
|---|---|---|
| Weight-shifting | Time | MT, MTPSM |
| Fluency | TEPSM, MD, DC, dNMP | |
| Accuracy | TESSM, DT, ME, TA | |
| Subjective assessments | PP, ET, PS, PC | |
| Maintaining balance | Time-domain measures | MDIST, MDISTAP, MDISTML, RDIST, RDISTAP, RDISTML, MVEL, MVELAP, MVELML, AREACC, AREACE |
| Subjective assessments | PP, ET, PS, PC |
| DV | Goal Target Distance | Goal Target Direction | Interaction p-Value | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Distance 1 | Distance 2 | Distance 3 | E | N | NE | NW | W | ||
| MT | 2.41A (0.13) | 3.10B (0.09) | 3.61B (0.13) | 2.99 (0.11) | 3.00 (0.17) | 3.10 (0.12) | 3.12 (0.15) | 2.98 (0.12) | 0.520 |
| MTPSM | 1.18A (0.06) | 1.55B (0.08) | 1.95C (0.11) | 1.38b (0.07) | 1.69a (0.10) | 1.71a (0.13) | 1.66a (0.09) | 1.36b (0.09) | 0.009 |
| TEPSM | 6.00A (0.31) | 10.92B (0.48) | 16.66C (0.68) | 10.96c (0.54) | 9.46d (0.53) | 12.43a (0.64) | 12.07ab (0.55) | 11.04bc (0.56) | 0.501 |
| MD | 0.99A (0.07) | 1.32B (0.05) | 1.72C (0.06) | 1.05b (0.06) | 0.86c (0.07) | 1.92a (0.12) | 1.85a (0.13) | 1.04bc (0.07) | 0.002 |
| DC | 68.82 (2.13) | 72.37 (1.47) | 72.71 (1.42) | 81.23a (1.83) | 78.88a (1.15) | 56.18b (2.83) | 57.78b (3.55) | 82.43a (1.75) | 0.544 |
| dNMP | 1.35A (0.12) | 1.91B (0.19) | 2.42C (0.20) | 2.39a (0.27) | 1.28c (0.14) | 1.74b (0.18) | 1.80b (0.13) | 2.26a (0.18) | 0.035 |
| TESSM | 5.53A (0.56) | 6.85B (0.63) | 7.92B (0.99) | 7.65a (0.87) | 4.89b (0.60) | 6.67a (0.92) | 6.84a (0.86) | 7.78a (0.92) | 0.351 |
| DT | 1.23A (0.10) | 1.54B (0.09) | 1.66B (0.15) | 1.61 (0.14) | 1.30 (0.16) | 1.39 (0.14) | 1.46 (0.14) | 1.62 (0.13) | 0.664 |
| ME | 1.26 (0.14) | 0.92 (0.13) | 1.13 (0.14) | 1.16a (0.16) | 0.47b (0.08) | 1.10a (0.18) | 1.24a (0.16) | 1.54a (0.22) | 0.191 |
| TA | 4.78 (0.75) | 6.09 (0.80) | 7.16 (1.11) | 6.58a (0.93) | 2.76b (0.42) | 6.99a (1.39) | 7.18a (1.18) | 6.55a (1.12) | 0.148 |
| PP | 3.60A (0.15) | 3.48AB (0.14) | 3.24B (0.20) | 3.33 (0.19) | 3.43 (0.17) | 3.43 (0.17) | 3.47 (0.17) | 3.53 (0.19) | 0.015 |
| ET | 3.76A (0.16) | 3.39B (0.15) | 2.96C (0.17) | 3.45ab (0.19) | 3.20b (0.19) | 3.28b (0.16) | 3.20b (0.17) | 3.72a (0.13) | 0.000 |
| PS | 4.49A (0.09) | 3.97B (0.13) | 3.37C (0.16) | 4.17a (0.12) | 3.47c (0.17) | 3.87b (0.15) | 3.98ab (0.12) | 4.23a (0.11) | 0.000 |
| PC | 3.67A (0.13) | 3.24B (0.14) | 2.59C (0.13) | 3.55a (0.10) | 2.92b (0.17) | 2.98b (0.12) | 2.92b (0.15) | 3.47a (0.13) | 0.000 |
| DV | Target Distance | Target Direction | ||||
|---|---|---|---|---|---|---|
| E | N | NE | NW | W | ||
| MTPSM | Distance 1 | 1.10Abc (0.07) | 1.16Ab (0.07) | 1.44Aa (0.14) | 1.21Aab (0.11) | 0.99Ac (0.06) |
| Distance 2 | 1.28Ab (0.09) | 1.68Ba (0.11) | 1.52Aab (0.13) | 1.74Ba (0.13) | 1.55Ba (0.11) | |
| Distance 3 | 1.74Bbc (0.16) | 2.24Ca (0.20) | 2.19Ba (0.20) | 2.04Bab (0.14) | 1.54Bc (0.15) | |
| MD | Distance 1 | 0.75Ab (0.08) | 0.64Ab (0.08) | 1.45Aa (0.17) | 1.34Aa (0.13) | 0.77Ab (0.09) |
| Distance 2 | 1.10Bb (0.06) | 0.97Bb (0.12) | 1.61Aa (0.14) | 1.75Ba (0.18) | 1.18Bb (0.13) | |
| Distance 3 | 1.31Bb (0.12) | 0.95Bc (0.11) | 2.72Ba (0.24) | 2.47Ca (0.21) | 1.17Bbc (0.14) | |
| dNMP | Distance 1 | 1.49Aa (0.15) | 0.89Ab (0.11) | 1.38Aa (0.21) | 1.31Aa (0.12) | 1.68Aa (0.23) |
| Distance 2 | 2.57Ba (0.35) | 1.41Bc (0.21) | 1.76Bbc (0.16) | 1.81Bbc (0.17) | 1.97Ab (0.23) | |
| Distance 3 | 3.10Ba (0.44) | 1.53Bc (0.17) | 2.07Bbc (0.27) | 2.28Bb (0.24) | 3.12Ba (0.28) | |
| PP | Distance 1 | 3.30 (0.22) | 3.90A (0.20) | 3.55AB (0.24) | 3.60 (0.26) | 3.65 (0.24) |
| Distance 2 | 3.25 (0.24) | 3.55A (0.20) | 3.70A (0.21) | 3.40 (0.18) | 3.50 (0.19) | |
| Distance 3 | 3.45a (0.21) | 2.85Bb (0.29) | 3.05Bb (0.22) | 3.40a (0.22) | 3.45a (0.24) | |
| ET | Distance 1 | 3.65 (0.21) | 3.90A (0.22) | 3.70A (0.21) | 3.55A (0.22) | 4.00 (0.21) |
| Distance 2 | 3.40 (0.20) | 3.35A (0.23) | 3.45A (0.21) | 3.15B (0.20) | 3.60 (0.18) | |
| Distance 3 | 3.30ab (0.24) | 2.35Bd (0.23) | 2.70Bcd (0.21) | 2.90Bbc (0.20) | 3.55a (0.20) | |
| PS | Distance 1 | 4.70A (0.11) | 4.35A (0.17) | 4.35A (0.15) | 4.40A (0.13) | 4.65A (0.13) |
| Distance 2 | 4.00B (0.18) | 3.75B (0.20) | 3.85B (0.18) | 4.05B (0.15) | 4.20B (0.16) | |
| Distance 3 | 3.80Ba (0.19) | 2.30Cb (0.24) | 3.40Ca (0.25) | 3.50Ca (0.20) | 3.85Ca (0.17) | |
| PC | Distance 1 | 4.15Aa (0.15) | 3.85Aa (0.20) | 3.30Ab (0.21) | 3.30Ab (0.19) | 3.75a (0.19) |
| Distance 2 | 3.70Ba (0.15) | 3.05Bbc (0.22) | 3.15Abc (0.20) | 2.90Bc (0.22) | 3.40ab (0.18) | |
| Distance 3 | 2.80Cb (0.17) | 1.85Cc (0.21) | 2.50Bb (0.17) | 2.55Bb (0.17) | 3.25a (0.19) | |
| DV | Goal Target Distance | Goal Target Direction | Interaction p-Value | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Distance 1 | Distance 2 | Distance 3 | E | N | NE | NW | W | ||
| MDIST | 0.21A (0.01) | 0.24B (0.02) | 0.26B (0.02) | 0.25 (0.03) | 0.26 (0.02) | 0.23 (0.02) | 0.21 (0.01) | 0.24 (0.02) | 0.113 |
| MDISTAP | 0.17A (0.01) | 0.20B (0.01) | 0.19B (0.01) | 0.20 (0.02) | 0.20 (0.02) | 0.19 (0.02) | 0.16 (0.01) | 0.18 (0.01) | 0.482 |
| MDISTML | 0.09A (0.01) | 0.10A (0.01) | 0.14B (0.01) | 0.11 (0.01) | 0.12 (0.01) | 0.10 (0.01) | 0.10 (0.01) | 0.12 (0.01) | 0.019 |
| RDIST | 0.23A (0.02) | 0.27B (0.02) | 0.30B (0.02) | 0.28 (0.03) | 0.29 (0.02) | 0.27 (0.02) | 0.24 (0.02) | 0.26 (0.02) | 0.103 |
| RDISTAP | 0.20A (0.01) | 0.24B (0.02) | 0.24B (0.03) | 0.24 (0.03) | 0.24 (0.02) | 0.23 (0.02) | 0.19 (0.01) | 0.21 (0.01) | 0.327 |
| RDISTML | 0.11A (0.01) | 0.13A (0.01) | 0.17B (0.01) | 0.13 (0.01) | 0.14 (0.01) | 0.13 (0.01) | 0.13 (0.01) | 0.14 (0.01) | 0.017 |
| MVEL | 0.82A (0.06) | 0.98B (0.07) | 1.22C (0.10) | 1.02 (0.11) | 1.10 (0.09) | 1.04 (0.11) | 0.93 (0.07) | 0.94 (0.07) | 0.021 |
| MVELAP | 0.62A (0.05) | 0.74B (0.06) | 0.88C (0.08) | 0.75 (0.10) | 0.84 (0.06) | 0.80 (0.10) | 0.68 (0.06) | 0.65 (0.05) | 0.053 |
| MVELML | 0.42A (0.03) | 0.49B (0.04) | 0.65C (0.05) | 0.54 (0.05) | 0.54 (0.05) | 0.49 (0.04) | 0.49 (0.03) | 0.54 (0.04) | 0.008 |
| AREACC | 0.51A (0.07) | 0.76B (0.12) | 0.98B (0.17) | 0.93 (0.29) | 0.87 (0.13) | 0.77 (0.17) | 0.54 (0.07) | 0.65 (0.09) | 0.239 |
| AREACE | 0.42A (0.06) | 0.57B (0.08) | 0.80C (0.11) | 0.66 (0.17) | 0.69 (0.11) | 0.56 (0.08) | 0.47 (0.07) | 0.59 (0.08) | 0.057 |
| PP | 3.71A (0.13) | 3.68A (0.14) | 3.32B (0.16) | 3.52 (0.17) | 3.44 (0.17) | 3.65 (0.16) | 3.73 (0.14) | 3.51 (0.18) | 0.053 |
| ET | 3.71A (0.16) | 3.40B (0.12) | 2.80C (0.13) | 3.49 (0.18) | 3.05 (0.12) | 3.35 (0.13) | 3.30 (0.15) | 3.33 (0.18) | 0.000 |
| PS | 4.58A (0.09) | 4.13B (0.11) | 3.28C (0.13) | 4.29a (0.12) | 3.44c (0.15) | 3.95b (0.14) | 4.05b (0.11) | 4.25ab (0.14) | 0.000 |
| PC | 3.72A (0.12) | 3.38B (0.12) | 2.66C (0.13) | 3.43ab (0.14) | 2.83c (0.13) | 3.24ab (0.13) | 3.21b (0.14) | 3.57a (0.18) | 0.001 |
| DV | Target Distance | Target Direction | ||||
|---|---|---|---|---|---|---|
| E | N | NE | NW | W | ||
| MDISTML | Distance 1 | 0.09ab (0.01) | 0.08Ab (0.01) | 0.08Ab (0.01) | 0.08Ab (0.01) | 0.12a (0.01) |
| Distance 2 | 0.11 (0.01) | 0.09A (0.01) | 0.10A (0.01) | 0.09AB (0.01) | 0.12 (0.02) | |
| Distance 3 | 0.13 (0.01) | 0.18B (0.03) | 0.13B (0.01) | 0.13B (0.02) | 0.12 (0.01) | |
| RDISTML | Distance 1 | 0.11Aab (0.01) | 0.09Ab (0.01) | 0.10Ab (0.01) | 0.10Ab (0.01) | 0.14a (0.02) |
| Distance 2 | 0.13AB (0.02) | 0.11A (0.01) | 0.12A (0.01) | 0.11AB (0.01) | 0.15 (0.02) | |
| Distance 3 | 0.16B (0.02) | 0.22B (0.03) | 0.15B (0.02) | 0.16B (0.02) | 0.15 (0.01) | |
| MVEL | Distance 1 | 0.85A (0.09) | 0.77A (0.06) | 0.79A (0.07) | 0.82A (0.09) | 0.88 (0.07) |
| Distance 2 | 1.11B (0.14) | 1.00B (0.08) | 0.90B (0.07) | 0.91AB (0.07) | 0.96 (0.10) | |
| Distance 3 | 1.10B (0.14) | 1.54C (0.17) | 1.42B (0.26) | 1.06B (0.08) | 0.97 (0.08) | |
| MVELML | Distance 1 | 0.43A (0.04) | 0.37A (0.04) | 0.38A (0.03) | 0.39A (0.03) | 0.51 (0.06) |
| Distance 2 | 0.54AB (0.06) | 0.43A (0.04) | 0.46A (0.04) | 0.46A (0.04) | 0.53 (0.05) | |
| Distance 3 | 0.65B (0.07) | 0.81B (0.11) | 0.61B (0.06) | 0.61B (0.05) | 0.57 (0.04) | |
| ET | Distance 1 | 3.62 (0.23) | 3.90A (0.17) | 3.86A (0.20) | 3.62A (0.21) | 3.57 (0.25) |
| Distance 2 | 3.48 (0.24) | 3.33B (0.16) | 3.52A (0.18) | 3.43AB (0.21) | 3.24 (0.21) | |
| Distance 3 | 3.38a (0.20) | 1.90Cc (0.15) | 2.67Bb (0.20) | 2.86Bb (0.22) | 3.19ab (0.22) | |
| PS | Distance 1 | 4.86A (0.08) | 4.38A (0.19) | 4.48A (0.13) | 4.57A (0.13) | 4.62A (0.15) |
| Distance 2 | 4.24B (0.17) | 3.86B (0.20) | 4.05B (0.16) | 4.19A (0.15) | 4.33B (0.14) | |
| Distance 3 | 3.76Ca (0.21) | 2.10Cb (0.15) | 3.33Ca (0.22) | 3.38Ba (0.19) | 3.81Ca (0.25) | |
| PC | Distance 1 | 3.62 (0.21) | 3.57A (0.21) | 3.71A (0.16) | 3.71A (0.18) | 4.00A (0.17) |
| Distance 2 | 3.57 (0.19) | 3.19A (0.16) | 3.33A (0.20) | 3.19B (0.19) | 3.62B (0.23) | |
| Distance 3 | 3.10a (0.19) | 1.71Bb (0.17) | 2.67Ba (0.21) | 2.71Ca (0.16) | 3.10Ca (0.24) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, D.; Lee, Y.; Yun, M. Understanding Balance Control in the Context of Riding a Personal Mobility Device. Appl. Sci. 2021, 11, 4173. https://doi.org/10.3390/app11094173
Park D, Lee Y, Yun M. Understanding Balance Control in the Context of Riding a Personal Mobility Device. Applied Sciences. 2021; 11(9):4173. https://doi.org/10.3390/app11094173
Chicago/Turabian StylePark, Donggun, Yushin Lee, and Myunghwan Yun. 2021. "Understanding Balance Control in the Context of Riding a Personal Mobility Device" Applied Sciences 11, no. 9: 4173. https://doi.org/10.3390/app11094173
APA StylePark, D., Lee, Y., & Yun, M. (2021). Understanding Balance Control in the Context of Riding a Personal Mobility Device. Applied Sciences, 11(9), 4173. https://doi.org/10.3390/app11094173