1. Introduction
One of the principal mechanical components in global industries is the rotating machine. With the rapid and daily advancements in technology, new rotating machinery tools appear that are better, more complicated, and more accurate. Therefore, their functionality affects safety and operational stability and reliable industrial production. However, due to the complexity in rotary machinery systems and the multiplicity of parts, the probability of failure is greatly increased. Among all the components in rotating machines, rolling element bearings (REBs) are used in a majority of them. Bearings facilitate the movement of components owing to the rolling action and diminished friction. Their exceptional anti-friction ability makes them a very important tool wherever there is the challenge of energy savings [
1].
Among all the industrial attention, one absolute concern to ensure reliability and safety in advanced technical systems is anomaly detection. Timely and correct anomaly detection prevents disastrous events and increases production efficiency. Furthermore, immediate fault diagnosis in REBs can help to figure out the main reasons for product corruption and can avoid irregularities in the system and/or complete failure [
2].
Even though fault detection and diagnosis are acutely challenging and intricate due to nonlinear parameters in the bearings and in work complexity, bearings are one of the critical components that can cause 40 to 50% of all failures in rotating machines [
3,
4]. Accordingly, fault diagnosis for these elements is a necessity.
Within this concept, a maintenance procedure for monitoring the health situation of machinery is necessary, which makes the optimal decision to prevent or reduce faults mainly based on condition monitoring information. According to [
4,
5], for an efficient machinery health diagnosis program, one of the principal technical processes is data acquisition.
Numerous sensors are applied over a certain time to find industrial irregularities (for example, in bearings) based on physical signals called time-series signals [
6,
7]. A time series mainly operates as input data with which to train models for industrial anomaly detection [
2,
8]. Motivated by the discourse above, the issue of condition-monitoring procedures becomes important for identifying serious changes that are expressive of a fault.
Therefore, a multitude of studies have been conducted to monitor the condition of bearings [
9,
10,
11,
12,
13]. Subsequently, different methods have been determined for condition monitoring in order to recognize and classify bearing faults. These methods are defined based on vibration signals, acoustic emission signals, and motor current signature analysis [
14,
15].
Generally speaking, faults in bearings can be classified as follows: (i) the outer bearing race fault (OURF), (ii) the inner bearing race fault (INRF), (iii) the roller fault (ROLF), and (iv) the cage fault [
15,
16]. To recognize, discover, and classify faults in rolling element bearings, vibration supervising is widely used and is an economical monitoring method. Nowadays, fundamental monitoring of rolling element bearings generally depends on analyzing vibration signals due to their great capabilities in describing REB performance [
11]. Bearings generate vibration, either due to differing compliance or from the appearance of a crack. Numerous studies have been carried out on vibration signal analysis, and a variety of research has been conducted based on the kinds of defects and fault diagnosis techniques [
8,
17,
18].
Based on the information provided, fault diagnosis in bearings is conducted with various methods. The manner of signal processing can be leveraged as a known procedure; other methods exist that lean on data-driven techniques and model-based techniques; finally, one further method is an amalgamation of the above techniques—the hybrid method [
11,
19,
20]. What drives us to use the hybrid method is that these other methods have weaknesses that make them difficult to use. For instance, there are several challenges for signal-based techniques under an unknown status [
19]. Moreover, data-driven techniques have limitations related to massive datasets, while model-based approaches have difficulties in modeling a system accurately [
18,
19,
20]. The more robust and accurate fault diagnostics process should be considered if an uncertain situation exists [
11]. To overcome the mentioned limitations and attain a more effective technique for flaw diagnosis, the hybrid method is proposed. A combination of the model-based approach, data-driven method, and signal-based approach is proposed in which diagnosis results are claimed to be less complicated, more reliable, and accurate [
11]. Some examples are as follows: the combination of signal processing and deep learning techniques has been proposed in [
21]. This research has two main stages. First, the hybrid feature pool was generated using envelope spectrum, time domain and wavelet packet transform. Next, the stacked autoencoder was suggested to perform fault detection and diagnosis. In this work, determining the number of features and selecting the best features are the main challenges. The combination of data-driven and modern control algorithms for fault detection and diagnosis has been presented in [
22]. In this research, the second order system was modeled using the linear AutoRegressive with eXternal input (ARX)-Laguerre technique. The proportional integral (PI) observer was evaluated for the signal estimation. This technique is linear; however, for nonlinear and non-stationary signals such as vibration bearing signals, the accuracy may decrease. The combination of the modern control algorithm and deep learning approach has been proposed in [
23]. In this research, the rotor signal was modeled using the ARX-Laguerre technique. The combination of the PI observer and the scalable deep neural network was also used for signal estimation and fault decision. In this work, the combination of the signal-based approach for signal modeling and artificial intelligence approaches for signal estimation, and a machine learning method for classification is recommended as a hybrid algorithm for fault diagnosis of bearing.
Even though the current and voltage encompass all the information, sometimes fitting raw signals into some groups of rules and criteria for interpreting the fundamental messages that come from the signals is very difficult. This is where feature extraction methods help to dig out beneficial information purposefully from within the considered system. Using proper feature extraction techniques, researchers can obtain further knowledge on fault classification, which enables them to provide more efficient methods for this topic [
21,
24].
Signal modeling is one of the critical challenges to design the modern control-based approach for fault diagnosis [
25]. The challenge in nonlinear and nonstationary signal modeling was recently discussed [
23,
26,
27,
28,
29]. Signal modeling can be categorized into two standard groups: modeling based on the system’s dynamics [
29], and data-driven modeling [
18,
22,
30]. The challenge of vibration signal modeling may be solved by the mathematical-based approach and five degrees of freedom vibration bearing modeling are included [
29]. In complex systems, modeling with the dynamics-based approach has the challenge of intricacy.
To reduce the challenge from complexity in dynamics-based system modeling, data-driven signal modeling such as linear regression with ordinary least squares, AutoRegressive models (AR), the AutoRegressive with eXternal input (ARX) model, random forest, ARX-Laguerre, multivariate adaptive regression splines, support vector regression, the neural network, and Gaussian process regression have been suggested [
31]. Specially, in [
22,
30] the ARX and ARX-Laguerre methods have been used for signal modeling in second order systems. However, the accuracy of the nonlinear and nonstationary signal approximation is not good, which is the main challenge of these techniques [
22,
23,
30].
To estimate the original signals, diverse algorithms have been suggested in recent years. The observation-based technique is one of the powerful mechanisms for signal estimation [
25]. Artificial Intelligence (AI)-based observers and modern control-based observers are two main groups for signal estimation [
19,
20]. AI-based observers, such as the fuzzy logic observer [
20], the neural network observer [
21], and the neuro-fuzzy observer [
22], have the same challenge (namely, reliability). Modern control-based observers (including linear-based observers and nonlinear-based observers) have been used for signal estimations [
18,
19,
32]. The sliding mode observer is one of the most robust and reliable estimators for fault diagnosis. The application of the sliding mode observer for fault diagnosis was presented in [
18]. Despite its stability, reliability, and robustness, the sliding mode observer suffers from complexity and the chattering phenomenon. The next nonlinear-based observer is the feedback linearization approach [
33]. However, this approach solves the issue of the chattering phenomenon; robustness and reliability are two important drawbacks. Thus, the main challenge of nonlinear modern control-based observers (such as the sliding mode observer and the feedback linearization observer) is complexity. To reduce complexity, modern linear control-based observers, such as the proportional integral (PI) observer [
22] and the proportional multi-integral (PMI) observer [
34], have been suggested. Although PI observers and PMI observers have good performance in terms of accuracy and complexity, they have some problems related to robustness about uncertainties [
34]. To address the robustness issue, a combination of PMI observer and sliding mode approach was used in [
34]. The main limitation of this algorithm is to increase the amount of chattering and signal fluctuations in the presence of variation in torque load and motor speed.
To fault and state condition classifications, diverse classification algorithms such as decision trees [
35], nearest neighbor classifiers [
36], support vector machines [
37], and ensemble classifiers have been introduced.
In the paper, the hybrid-based fault diagnosis approach is suggested for anomaly identification of the bearing. The proposed hybrid-based approach has three main steps: (i) preprocessing and feature extraction step, (ii) signal modeling and estimation step, and (iii) classification step. Based on the above, the feature extraction technique is considered as the first stage. In this research, the main stage for designing the hybrid technique for rolling element bearing crack identification is to compute residual signals, which are calculated based on the difference between original signals and estimated signals. Modeling is also the main critical challenge in modern control-based observers for signal estimation. Subsequently, the first step in estimating a signal using observers is signal modeling to approximate the state-space function of the signal. Therefore, in the paper, we apply machine learning-based regression (MBR) to the ARX with uncertainty input (ARXU) technique for signal approximation, which is called “AMRXU”. After signal modeling, the original signals are estimated before computing the residual signals. To do this, first, the PMI observer is recommended. After that, to address the robustness limitation in the PMI, the variable structure (VS)-Lyapunov is adopted. Apart from reducing the complexity and increasing the accuracy and robustness of this technique, the flexibility about uncertainties in various torque loads, motor speeds, or crack sizes can be a weakness. To overcome this issue, we use the self-tuning hybrid-based observer which is a combination of a self-tuning AI-based technique and modern control-based approach to improve the positive points, which is called “AVSPMI”. Next, the residual signals are computed using the difference between the original signals and the estimated ones. Regarding the accuracy and robustness of the estimation of the signal, the residual signal levels are different in dissimilar classes. Finally, we select the SVM technique for classification. The contributions of this paper can be summarized as follows:
Indirect signal modeling by extracting the state-space nonlinear function using the combination of machine learning-based regression and ARXU technique.
Indirect signal estimation by using the combination of the PI observer, extended integral term, VS-Lyapunov technique, and self-tuning network-fuzzy system.
Combination of AMRXU, AVSPMI, and SVM-based approaches for bearing fault detection and classification.
The remainder of this paper is organized as the follows: The proposed Scheme is briefly described, and the block diagram of the proposed scheme has been shown in
Section 2. The data acquisition from the Case Western Reverse University (CWRU) dataset is described in
Section 3. Next, the preprocessing is explained in the
Section 4. In
Section 5, first, a smart autoregressive signal modeling is proposed over normal signal modeling. Next, a self-tuning hybrid-based observer is designed for signal estimation in normal conditions. The signal condition is classified by machine learning-based classifier in
Section 6. The experimental results are presented in
Section 7, and the conclusion is presented in
Section 8.
2. Proposed Scheme and Block Diagram
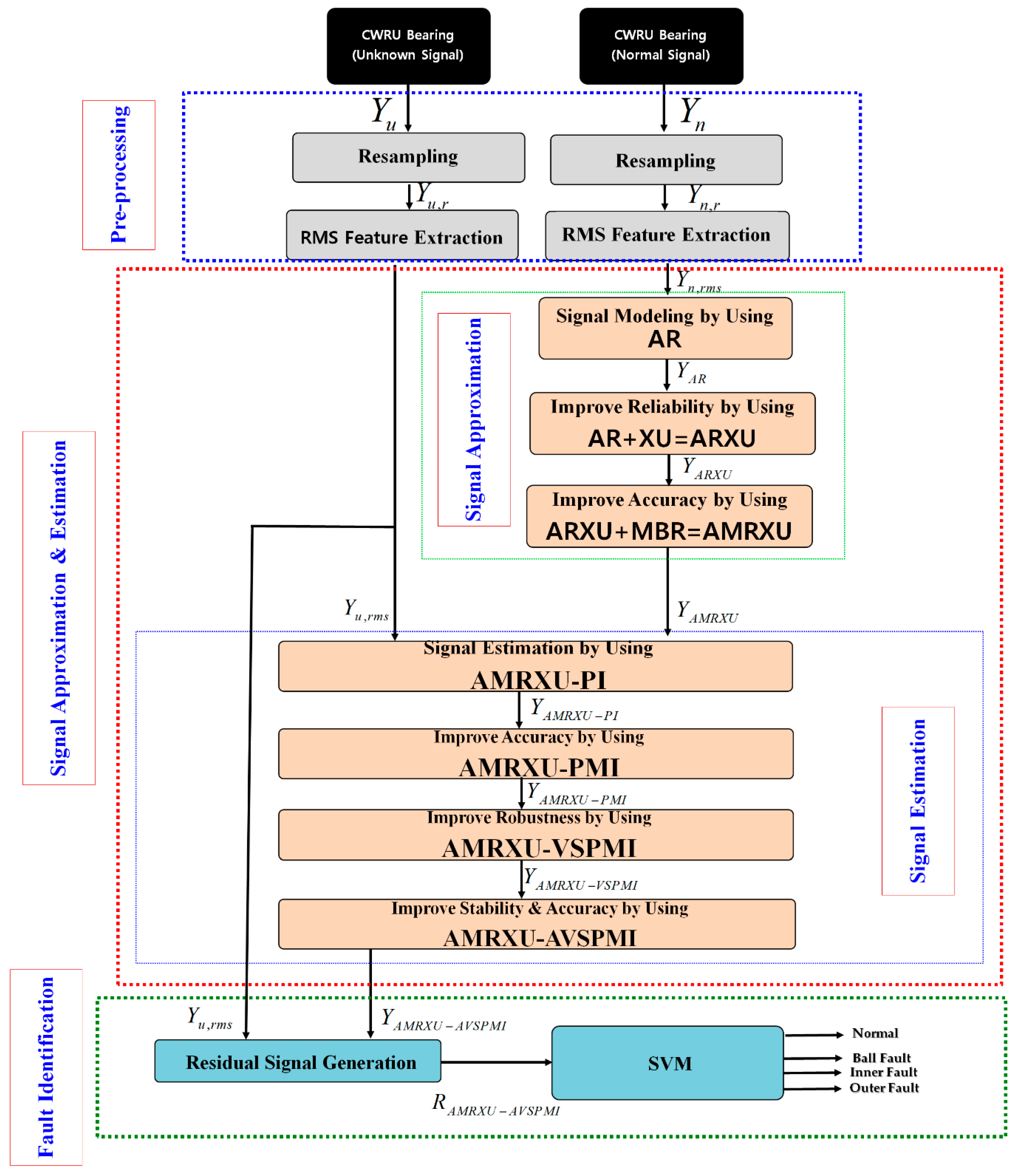
Figure 1 shows the overall block diagram of the proposed scheme, which consists of three main stages: the preprocessing stage, signal approximation and estimation stage, and fault identification stage.
At first, in the preprocessing stage, the vibration signals are resampled, and next, the RMS features are extracted from the resampled signals. The second stage is used to model and estimate the resampled RMS signals. Based on the difference between estimated signals and original ones, the signals can be classified into different conditions.
Thus, to estimate the resampled RMS signal, a modern control-based observation method is suggested. To build a modern control-based observer, first, the resampled RMS signal in normal condition needs to be modeled. So, the first step in the second stage is signal modeling. The combination of AR, external uncertainties inputs (XU), and MBR, which is denoted as AMRXU in the paper, is suggested for normal resampled RMS signal modeling. More specifically, the AR technique is used for normal signal modeling. To increase the robustness and accuracy, the AR technique is combined with the XU technique to implement the ARXU method for modeling the resampled RMS signal in the healthy state. This signal is nonlinear and nonstationary. Subsequently, to increase the accuracy of signal modeling with the property of nonlinearity and nonstationary, the resampled RMS signal in the normal condition is modeled with a combination of the ARXU and the MBR, which is denoted as AMRXU.
After modeling the resampled RMS signal in the normal condition, the indirect self-tuning observer, which is a combination of the modern control-based observer and AI-based approach, has been designed. Thus, first, the PI observer is implemented when the signal is modeled by the AMRXU technique (henceforth called AMRXU-PI). After that, to improve the accuracy, the AMRXU-PI observer is combined with integral term (I), which is called the AMRXU-PMI observer. Moreover, to increase the robustness in uncertain conditions (e.g., variant motor torque loads and variant bearing crack sizes) the AMRXU-PMI is combined with a VS-Lyapunov scheme, which is denoted as the AMRXU-VSPMI method. Next, the indirect self-tuning observer is designed by using the combination of the AMRXU-VSPMI with the self-tuning network-fuzzy system (SNFS) technique, which is denoted as AMRXU-AVSPMI. After estimating the resampled RMS signals using the proposed AMRXU-AVSPMI method, in the third stage, the machine learning technique is used for fault classification. To do this, first, the residual signals are computed using the difference between the original and estimated signal. Next, the support vector machine (SVM) is used for classification such that the residual signals will be classified into four main groups: normal (NORM), ROLF, INRF, and OURF.
7. Experimental Results
The CWRU dataset was chosen to test the recommended scheme [
38]. To test the quality of the proposed AMRXU-AVSPMI technique, the method was compared with state-of-the-art techniques, including AMRXU-VSPMI and AMRXU-PMI. All simulations are performed in MATLAB 2015a software with the system configuration of Intel (R) core ™ i7-8700U, 8 GB RAM, 3.2 GHz processor, and 64-bit Windows 10 operating system.
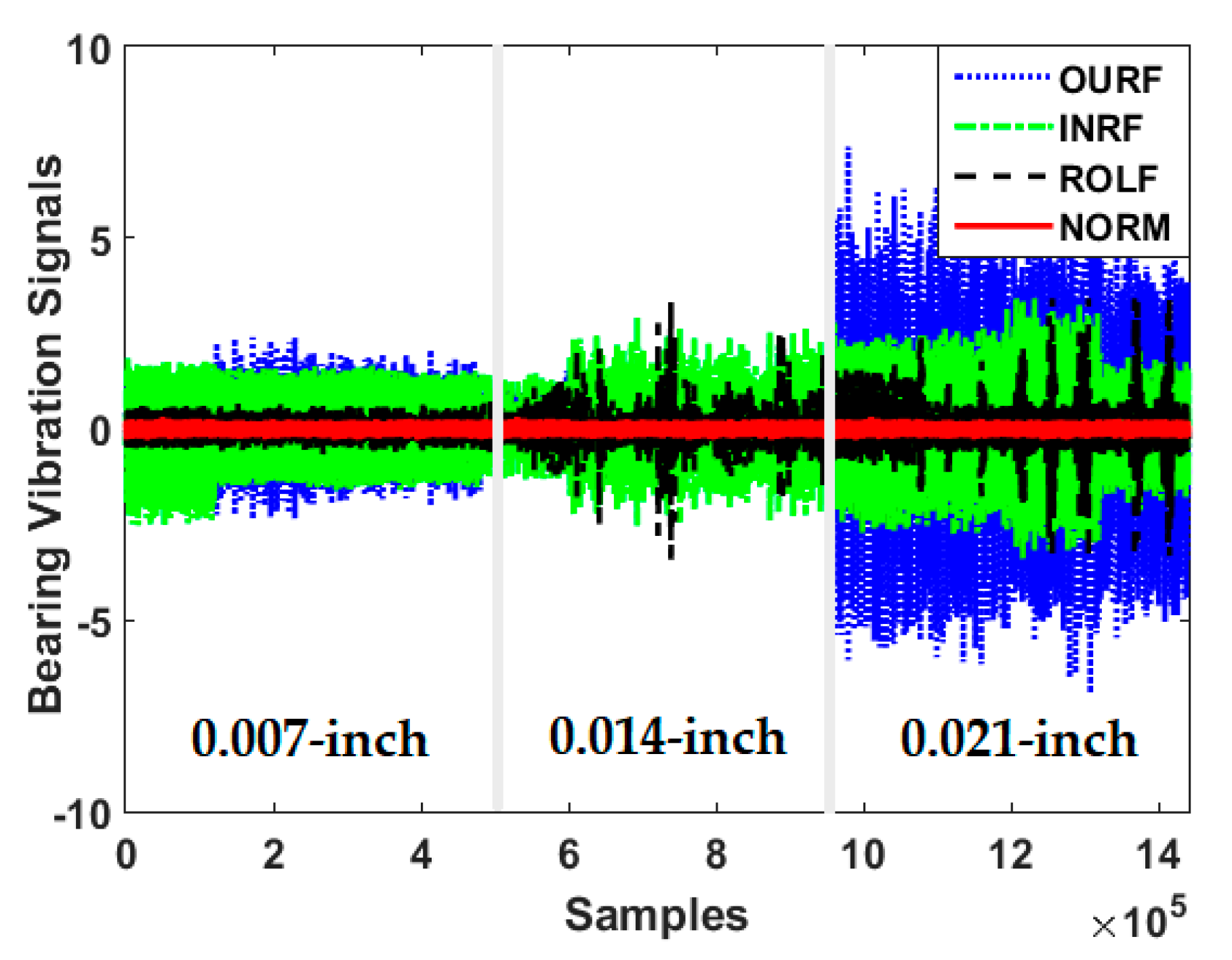
Figure 2 illustrates the original vibration signals in bearings under all conditions. As seen in the figure, when crack sizes are 0.007, 0.014, and 0.021 inches, the ROLF, INRF, and OURF overlap, causing misclassifications in fault diagnosis. Based on
Figure 2, it can be seen that the classification of the original raw signals is very difficult because these signals are overlapped in abnormal conditions. To address this issue, the proposed algorithm is recommended.
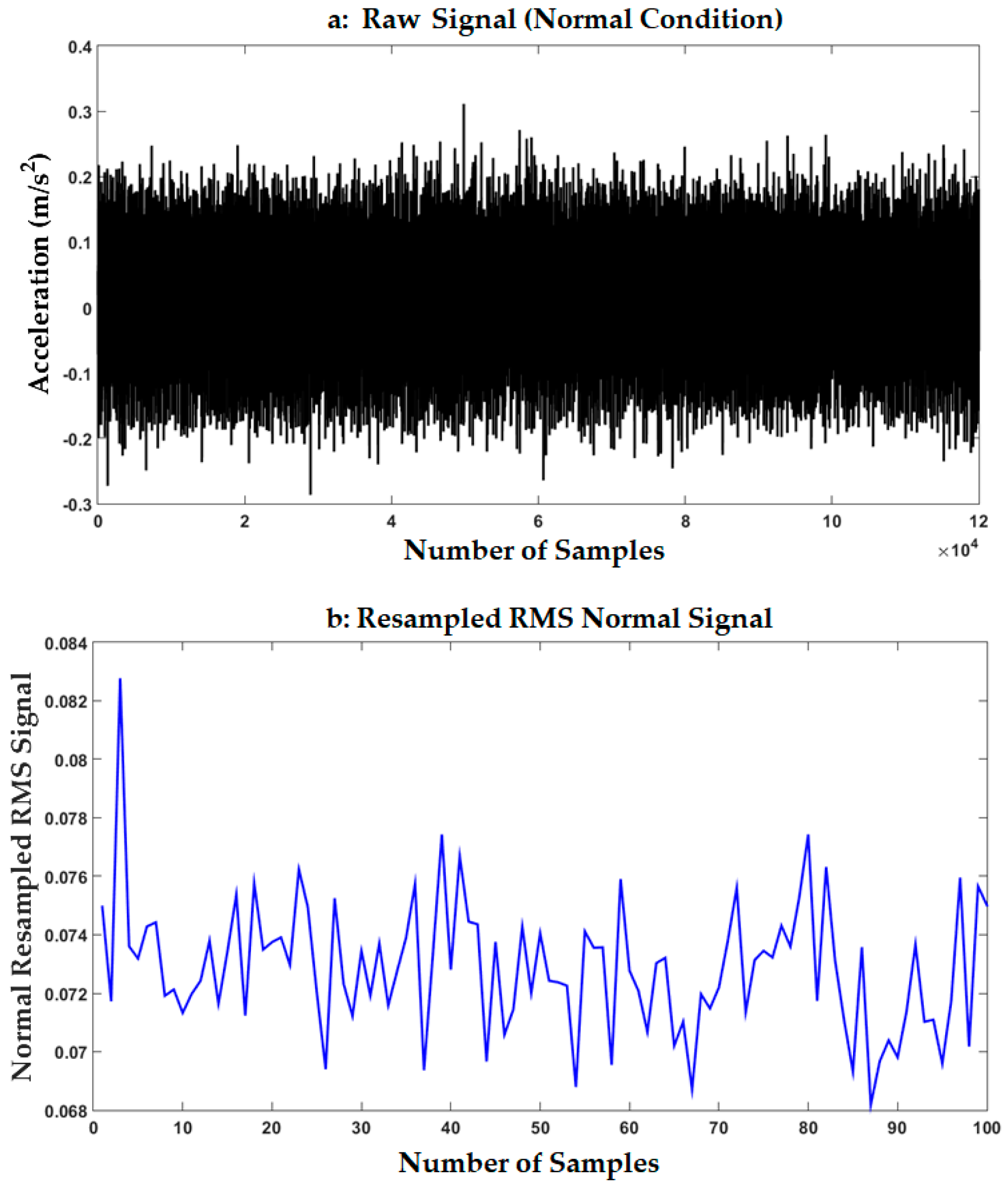
The normal Raw signal of bearing and the resampled RMS signal for the normal condition is illustrated in
Figure 3.
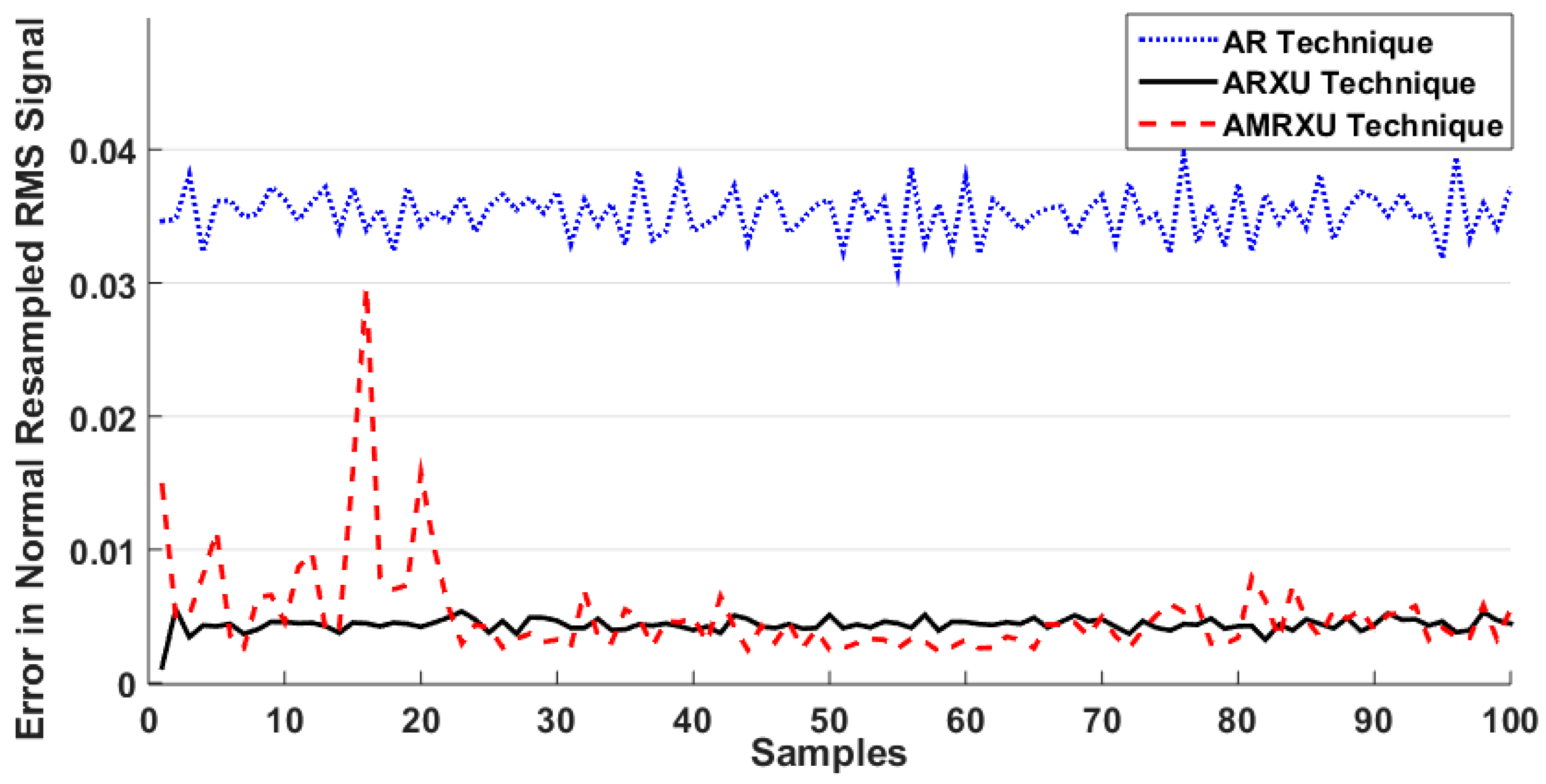
Figure 4 shows the error in signal modeling using the AR technique, the ARXU method, and the proposed AMRXU algorithm for resampled RMS signals in a normal state. In
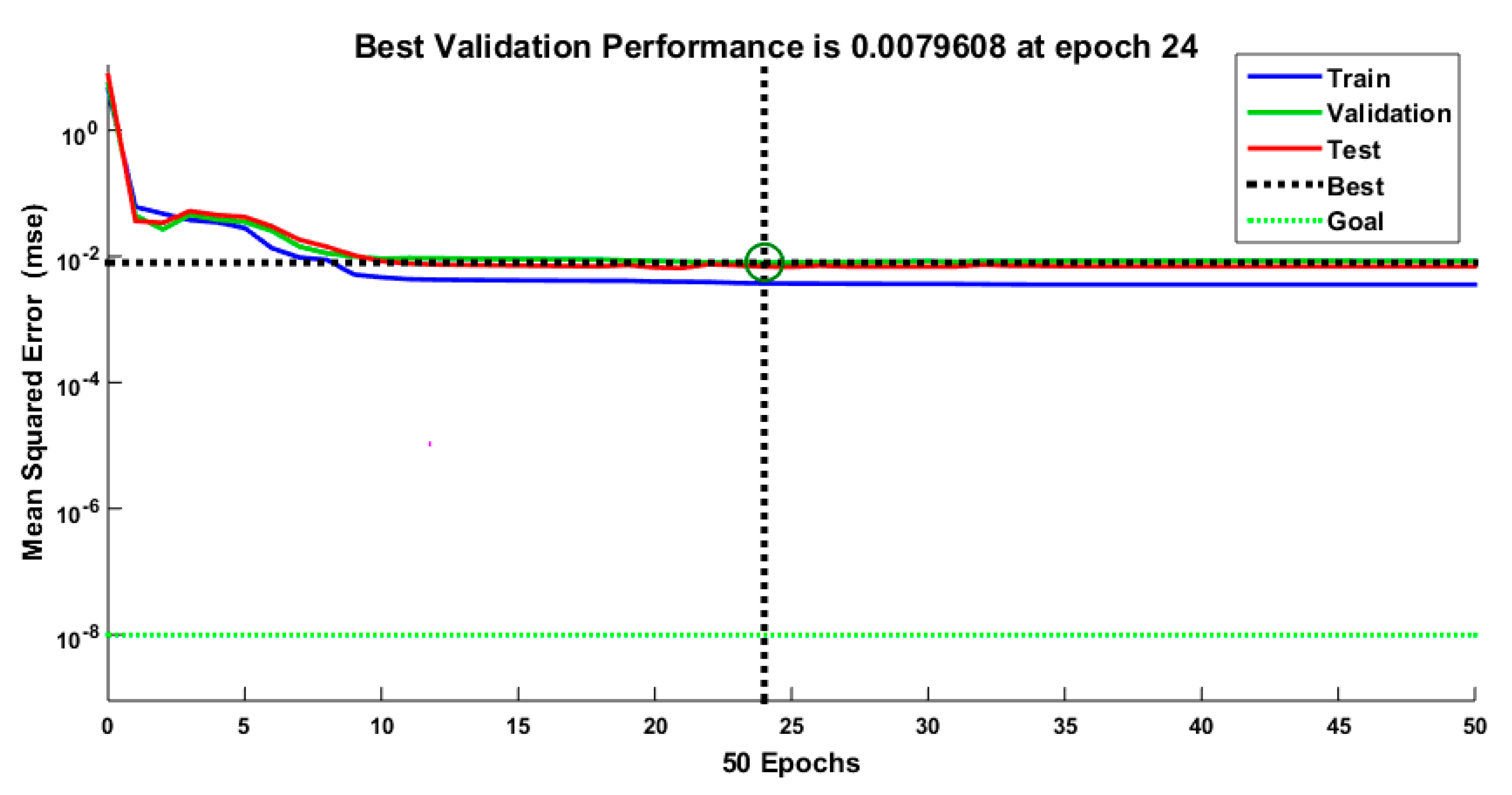
Figure 4, the accuracy of the normal resampled RMS signal modeled using AR is around 51.33%; by ARXU, it is around 85.5%, and based on AMRXU, the accuracy is 98.5%. Thus, the linear AR and ARXU approaches are not accurate enough to model the nonlinear and nonstationary signals. To address this issue, the nonlinear signal modeling approach using proposed AMRXU is suggested in this work. The mean square error (MSE) of the RMS resampled normal signal modeling using the AMRXU for training, validation, and testing is presented in
Figure 5. From the figure, we can observe that MSE curves sharply decrease within the first 7 epochs until they reach the MSE level of near 0.01. Then, for the next 17 epochs, some oscillations can be approximated, and these curves converge to an MSE level of around 0.0079.
The AMRXU-PMI and AMRXU-VSPMI methods are inherently linear estimators and the most significant advantage for them is that we can perform model structure and parameter identification rapidly. The performance of signal pattern recognition in these techniques appears to be satisfactory. However, to increase the performance of fault diagnosis, pattern identification and crack size detection, the AMRXU-AVSPMI is suggested in the paper.
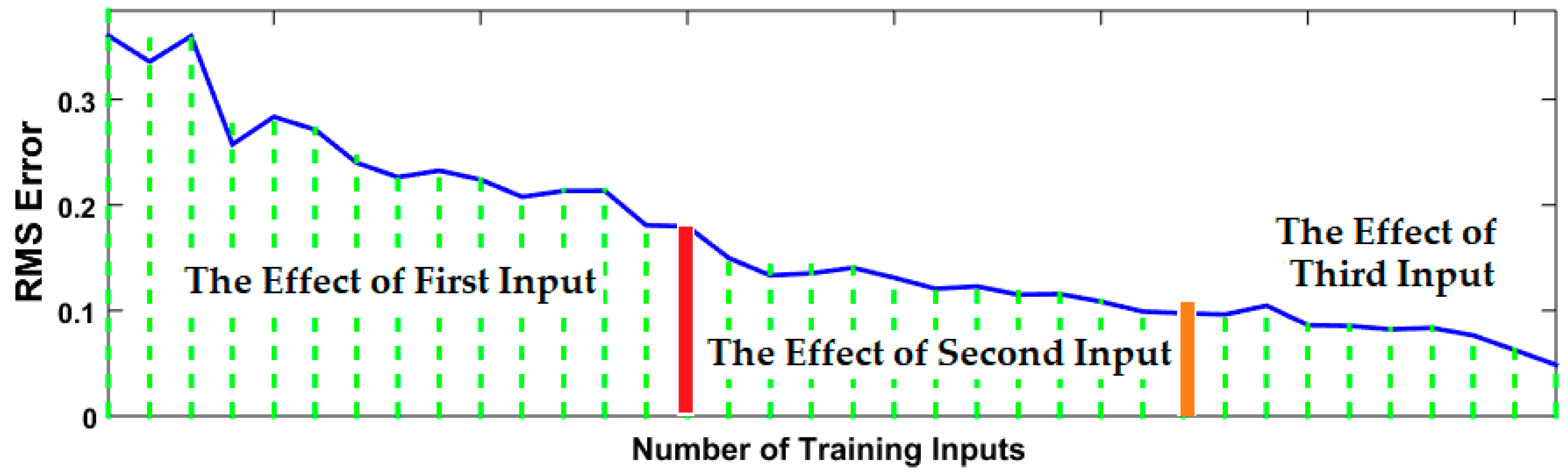
Figure 6 shows the effect of the SNFS technique and training the inputs on the RMS error of signal estimation. In this case, the SNFS algorithm has 34 nodes, 32 linear parameters, 18 nonlinear parameters, and eight fuzzy rules. The elapsed time in this SNFS design is 0.223 s. To have the minimum RMS error, the first, second, and third inputs need to have 15-, 12-, and 9-times training, respectively.
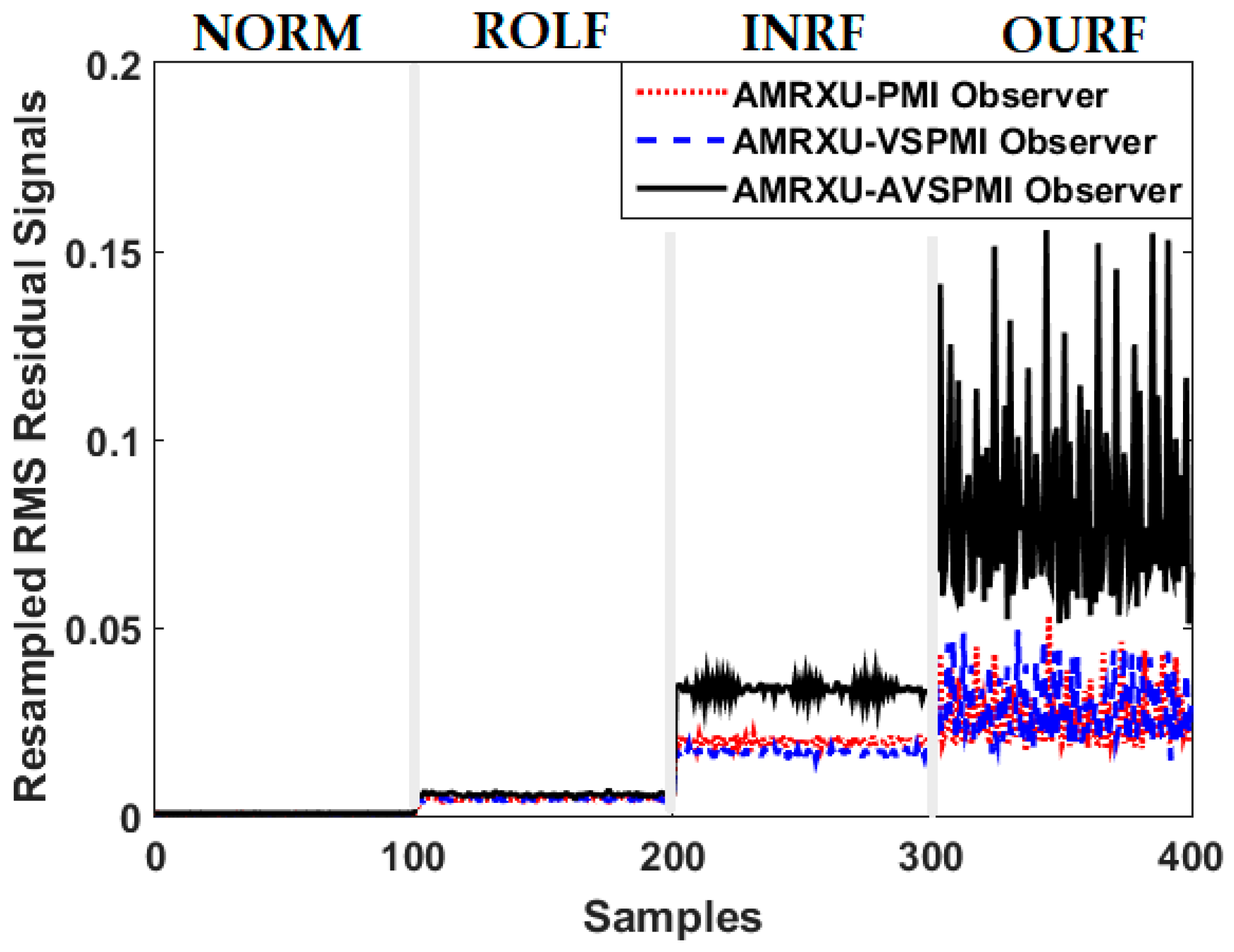
Figure 7 shows the power of estimation algorithms for signal classification using the proposed scheme (AMRXU-AVSPMI), the AMRXU-VSPMI technique, and the AMRXU-PMI method.
As seen in
Figure 7, with the proposed AMRXU-AVSPMI technique, which is an adaptive hybrid-nonlinear observer, the RMS signal amplitude for the four classes is detectable. In the AMRXU-PMI method, which is a linear observer, the distinction between the inner and outer faults is either very low or indistinguishable. These conditions improved somewhat with the AMRXU-VSPMI technique, which is a robust observer, but were less detectable than with the proposed AMRXU-AVSPMI observer.
To test the accuracy of each state’s identification, a combination of the proposed scheme (AMRXU-AVSPMI) with an SVM (AMRXU-AVSPMI+SVM) is compared against AMRXU-VSPMI+SVM and AMRXU-PMI+SVM. The fault identification and classification performance for the methods mentioned above are assessed by using important metrics [
46], such as averaged recall (
), averaged precision (
), averaged F1-score (
), and total fault identification and classification accuracy (FICA). We also use these metrics to test the robustness of the proposed methods. These metrics are defined as the following equations:
where,
,
,
are the true-positive value for the class of
k, false-positive value for the class of
k, and false-negative value for the class of
, and the data samples, respectively. Also,
K is the number of classes, and
k is the index of class such that
k = 1, …,
K. To test the robustness of the above algorithms, the results are tested in 10 experiments and summarized in
Table 4.
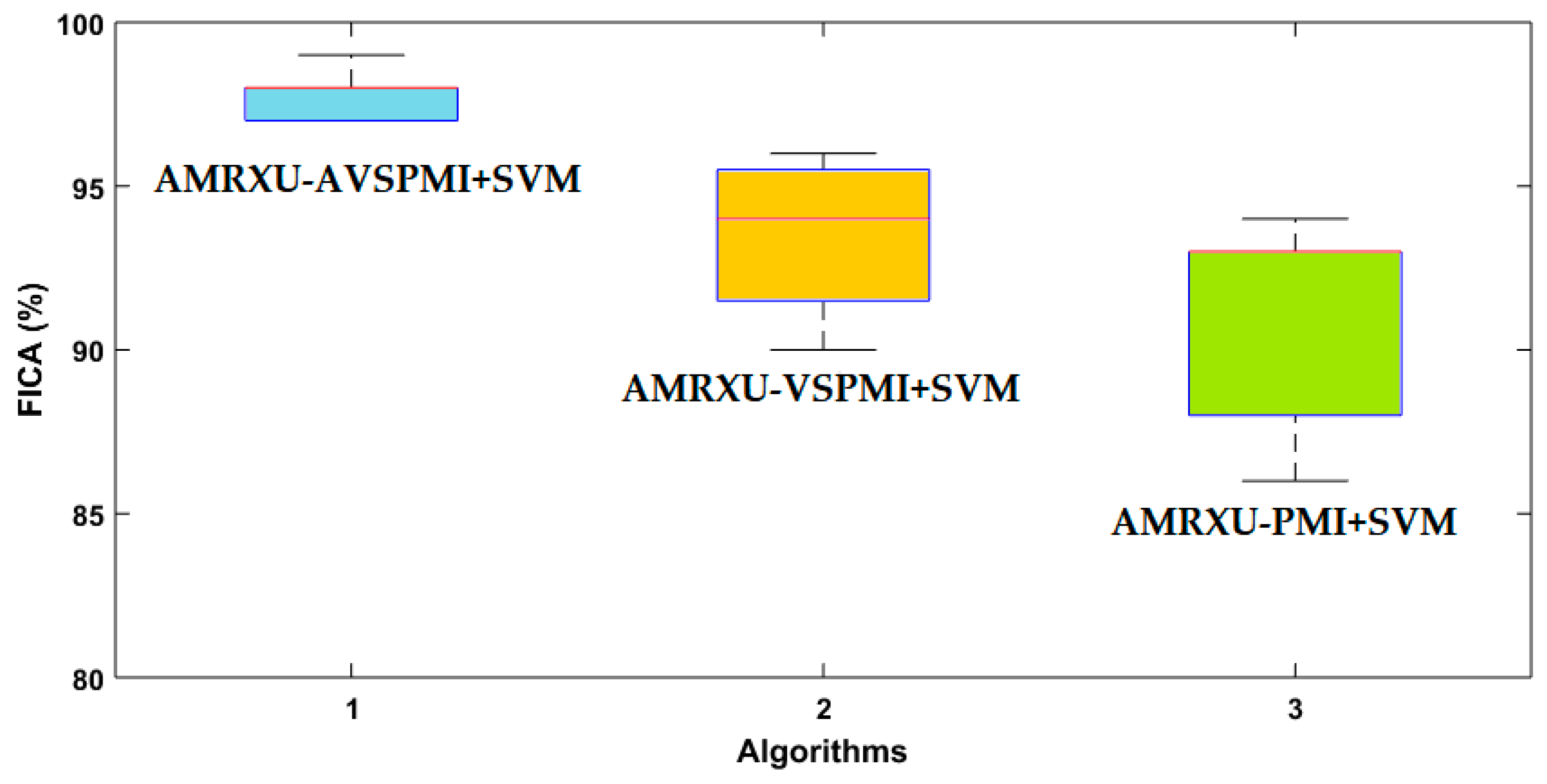
Figure 8 shows the boxplots of the FICA metric over 10 experiments for AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM. From
Figure 8, it is observed that the classification accuracy of the proposed method (AMRXU-AVSPMI+SVM) is the most robust because it does not deviate meaningfully from the average of FICA, which validates the repeatability of the test. For AMRXU-VSPMI+SVM, the deviation of FICA is not very high; however, the average accuracy is lower than that of the proposed method. Unlike the proposed method, the AMRXU-PMI+SVM boxplot has a significant deviation from the average of the FICA. From
Figure 8, we know that the combination of the AVSPMI observation technique, the modeling algorithm using AMRXU, and the SVM classifier can improve the classification and identification performance and fault diagnosis stability and robustness.
Figure 9,
Figure 10,
Figure 11 and
Figure 12 show the average of confusion matrices for 10 experiments to observe the specific details about the fault diagnosis performance when the torque load varies from 0 hp to 3 hp.
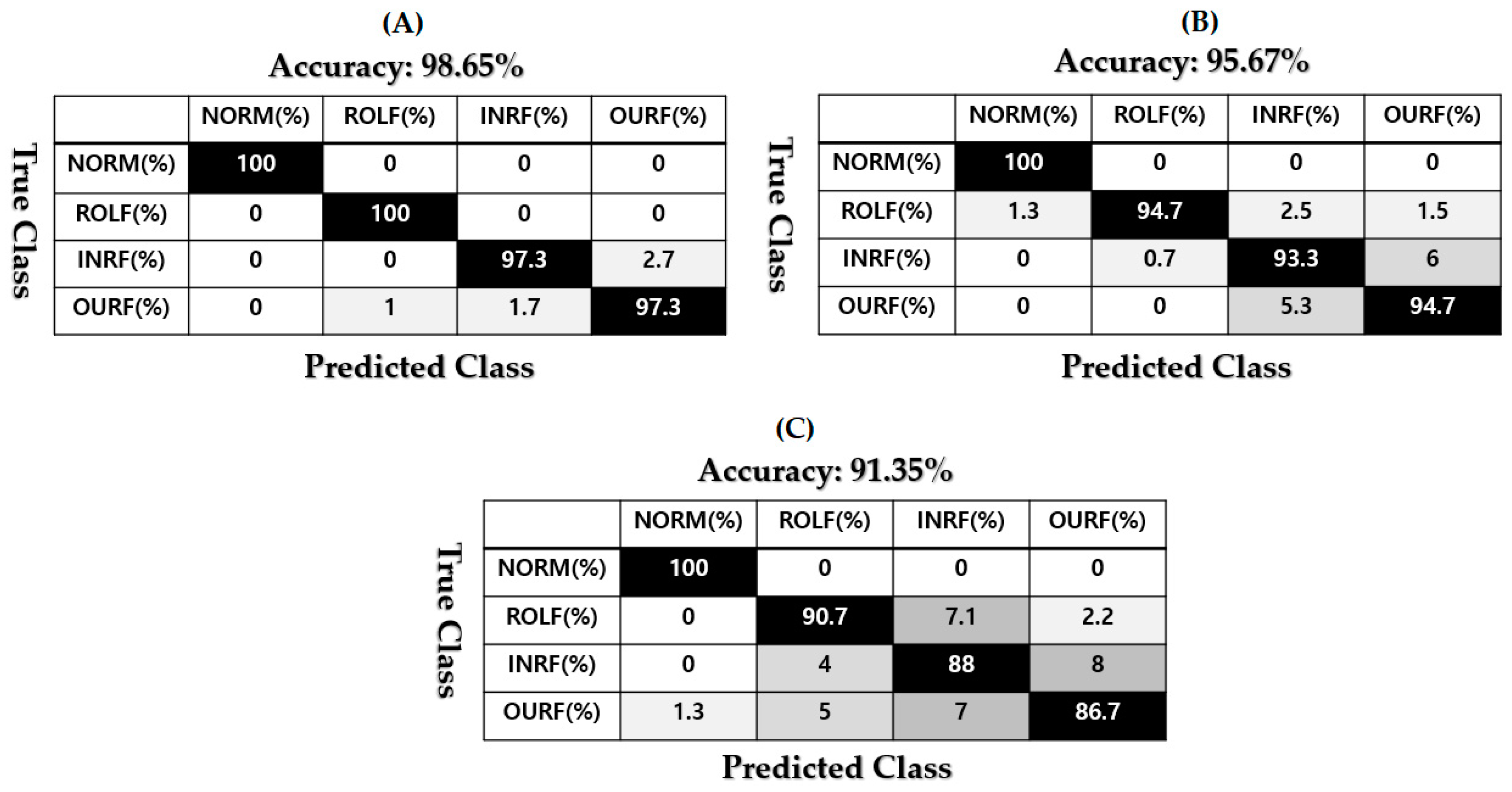
Table 5 and
Figure 9 demonstrate the accuracy of state identification when the torque load is 0 hp based on the proposed scheme (AMRXU-AVSPMI+SVM), AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM.
From
Figure 9, it is clear that AMRXU-VSPMI+SVM and AMRXU-PMI+SVM have high misclassification problems, especially between the inner and outer faults. The proposed AMRXU-AVSPMI+SVM reduced this challenge. Moreover, the average accuracy of state identification when the torque load was 0 hp from the proposed AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM was 98.65%, 95.67%, and 91.35%, respectively. Thus, the proposed AMRXU-AVSPMI+SVM improved the average state identification accuracy compared to AMRXU-VSPMI+SVM and AMRXU-PMI+SVM by around 2.98% and 7.3%, respectively.
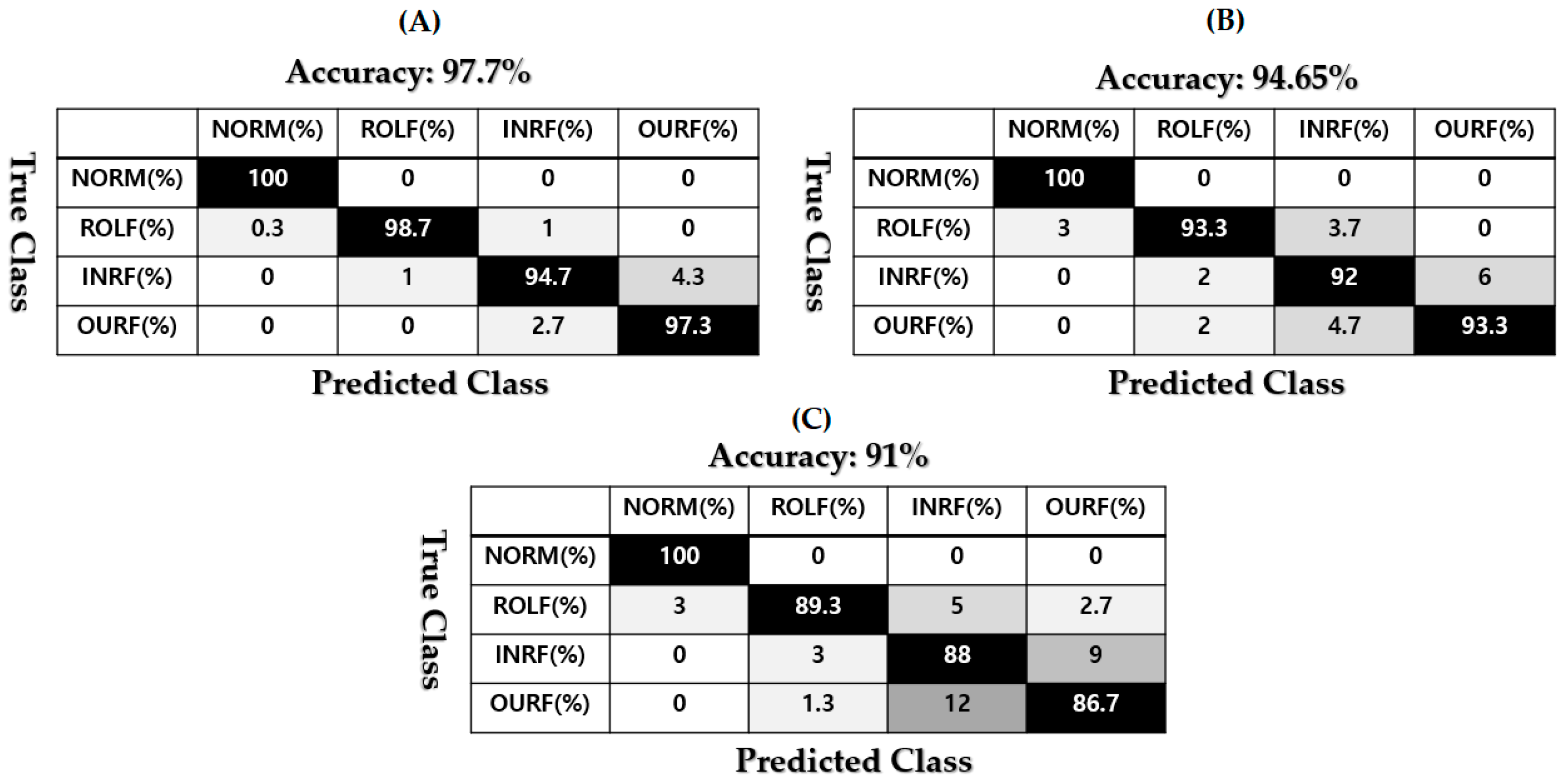
Table 6 and
Figure 10 demonstrate the accuracy in state identification when the torque load was 1 hp based on the proposed scheme (AMRXU-AVSPMI+SVM), on AMRXU-VSPMI+SVM, and on AMRXU-PMI+SVM.
Based on
Figure 10 and
Table 6, it is clear that AMRXU-PMI+SVM had a misclassification problem, especially between inner and outer faults, which the proposed AMRXU-AVSPMI+SVM method reduced. Furthermore, the average accuracy in state identification when the torque load was 1 hp with the proposed AMRXU-AVSPMI+SVM, with AMRXU-VSPMI+SVM, and with AMRXU-PMI+SVM was 97.7%, 94.65%, and 91%, respectively. Thus, the proposed AMRXU-AVSPMI+SVM improved average state identification accuracy compared to AMRXU-VSPMI+SVM and AMRXU-PMI+SVM by around 3.05% and 6.7%, respectively.
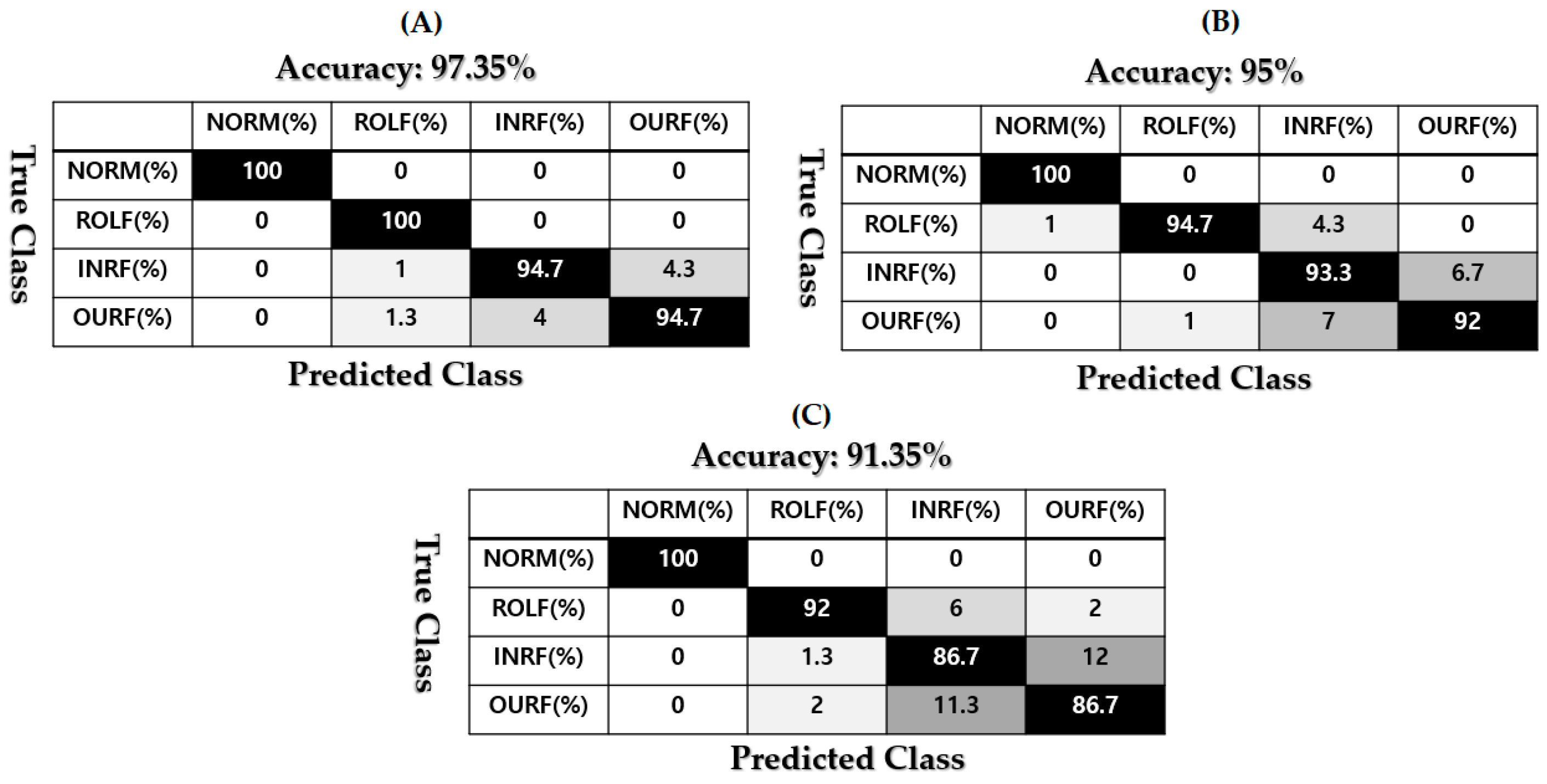
Table 7 and
Figure 11 demonstrate the accuracy in state identification when the torque load was 2 hp based on the proposed scheme (AMRXU-AVSPMI+SVM), on AMRXU-VSPMI+SVM, and on AMRXU-PMI+SVM.
In
Table 7 and
Figure 11, we can see that AMRXU-PMI+SVM and AMRXU-VSPMI+SVM had misclassification and overlap problems with inner and outer faults, but the proposed AMRXU-AVSPMI+SVM method reduced overlapping. Besides, the average accuracy in the state identification when the torque load was 2 hp in the proposed AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM was 97.35%, 95%, and 91.35%, respectively. Thus, the proposed AMRXU-AVSPMI+SVM improved average state identification accuracy from AMRXU-VSPMI+SVM and AMRXU-PMI+SVM by around 2.35% and 6%, respectively. Finally,
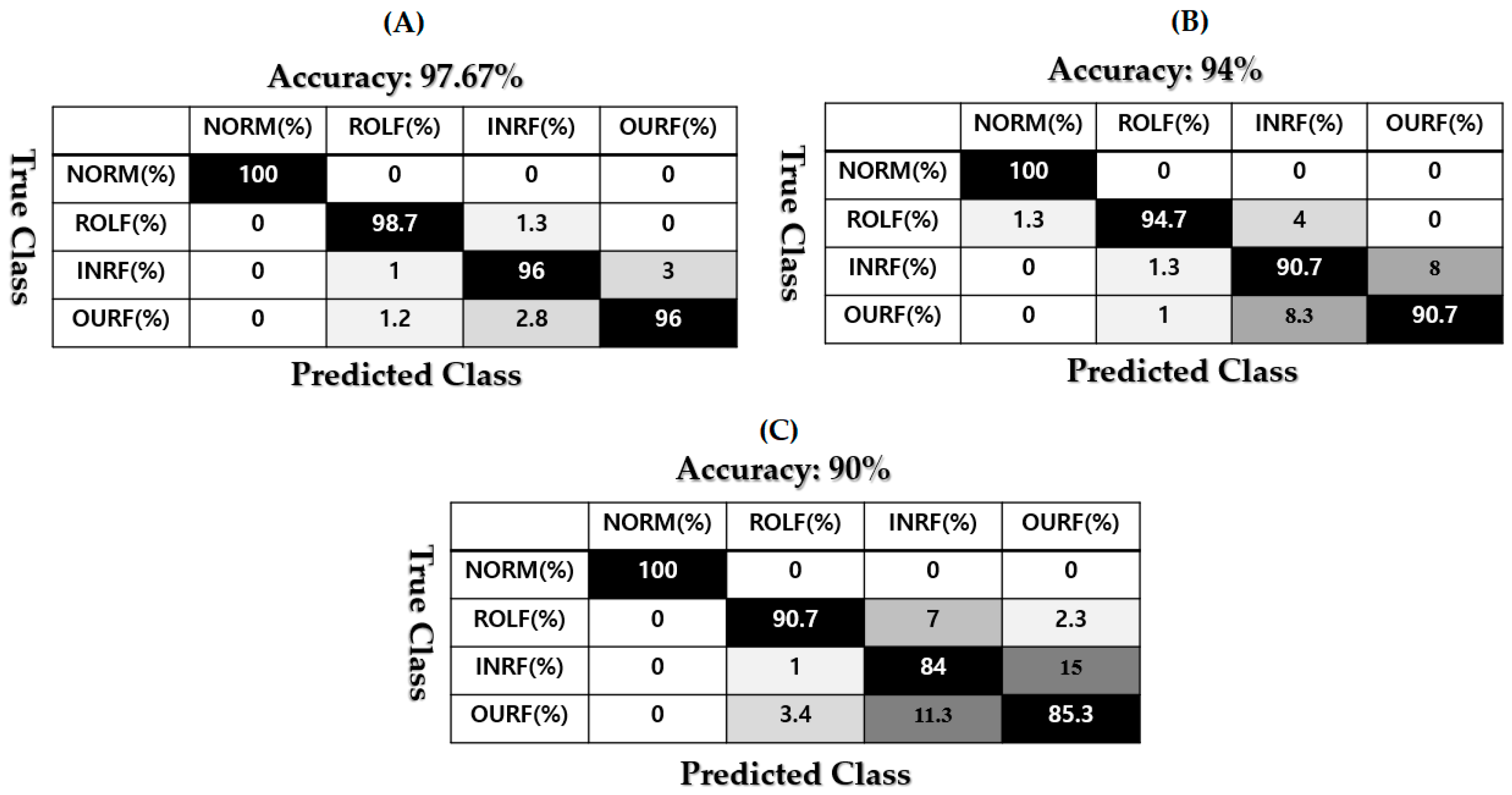
Table 8 and
Figure 12 show the accuracy in state identification when the torque load was 3 hp based on the proposed scheme (AMRXU-AVSPMI+SVM), on AMRXU-VSPMI+SVM, and on AMRXU-PMI+SVM.
The average fault pattern identification by the proposed AMRXU-AVSPMI+SVM, by AMRXU-VSPMI+SVM, and by AMRXU-PMI+SVM is demonstrated in
Table 9. In
Table 9, the accuracy in fault pattern detection from the proposed scheme, compared with AMRXU-VSPMI+SVM, increased for ROLF, INRF, and OURF defects by 5%, 3.34%, and 3.66%, respectively. Moreover, the accuracy in fault pattern detection from the proposed scheme, compared with AMRXU-PMI+SVM, for ROLF, INRF, and OURF defects improved by 8.67%, 9%, and 9.99%, respectively. Moreover, the average crack size detection in ROLF, INRF, and OURF from using AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM is shown in
Table 10,
Table 11 and
Table 12, respectively.
Table 10 shows the average accuracy in roller crack size detection using AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM. In this table, accuracy in roller crack size detection based on AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM was 99.33%, 94.33%, and 90.67%. In addition, the average accuracy in inner crack size detection using AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM is illustrated in
Table 11. In this table, accuracy in inner crack size detection based on the AMRXU-AVSPMI+SVM improved (compared with AMRXU-VSPMI+SVM and AMRXU-PMI+SVM) by 3.34% and 9%, respectively. Moreover, the average accuracy from outer crack size detection using AMRXU-AVSPMI+SVM, AMRXU-VSPMI+SVM, and AMRXU-PMI+SVM is illustrated in
Table 12. In this table, accuracy from outer crack size detection with AMRXU-AVSPMI+SVM improved in comparison with AMRXU-VSPMI+SVM and AMRXU-PMI+SVM by 3.66% and 10%, respectively.
The main reason that the accuracy of the fault diagnosis in the AMRXU-VSPMI and AMRXU-PMI algorithms is less than that of the proposed AMRXU-AVSPMI is due to the nature of the linear observation (AMRXU-VSPMI and AMRXU-PMI) algorithms. When these procedures are applied to the nonlinear and non-stationary such as bearing signals, the estimation error is developed compared to the nonlinear AMRXU-AVSPMI observation method. However, according to the concept of robustness, the performance of AMRXU-VSPMI is better than the AMRXU-PMI. Subsequently, the proposed hybrid framework is suitable for accurate fault diagnosis of the bearing in different crack sizes and torque loads in comparison with the other referenced methods. From the experimental results, it is obvious that the combination of the AVSPMI observation technique with the AMRXU modelling approach can improve the performance of the fault diagnosis in comparison with the linear observation technique. However, from
Table 9,
Table 10,
Table 11 and
Table 12, we can see that the inner and outer performance for fault pattern identification and crack size detection should be improved. Moreover, the preprocessing unit in the presence of the noisy signal must be improved by using filter techniques.
8. Conclusions
In the paper, a methodology has been developed to improve the fault diagnosis of a bearing by utilizing a hybrid observation. This methodology has been applied to a real case of an experimental CWRU dataset. Furthermore, within this method, the hybrid-based signal modeling for the normal resampled RMS signal using a smart autoregressive modeling approach with 98.5% accuracy was suggested. Moreover, to generate robust and reliable residual signals, the adaptive variable structure-Lyapunov proportional multi-integral observer was adopted. The support vector machine was recommended for the classification of residual signals. According to the experimental results, the average accuracy for crack size identification was 98.65%, 97.7%, 97.35%, and 97.67%, respectively, when the motor torque loads were 0 hp, 1 hp, 2 hp, and 3 hp. In addition, the average pattern identification for NORM, ROLF, INRF, and OURF was 100%, 99.34%, 95.67%, and 96.33%, respectively. The results suggest that the proposed approach was useful for the diagnosis of bearing failures. On the other hand, this approach could also be recommended in other systems such as condition monitoring. In that case, it would be important to consider some important factors such as the sampling rate frequency and motor rotational speeds to adapt the preprocessing stage since the accuracy of the fault diagnosis depends on them. In future work, we will focus on the improvement of the robustness, reliability, and precision of the proposed scheme. One of the possible directions for the improvement is to discover the robust function approximation by using a combination of the mathematical-based technique and data-driven-based signal modeling approach. Another direction is to improve the estimation algorithm by using the nonlinear architecture of the observation approach where we can combine the nonlinear robust observer with a deep learning approach to increase the performance of signal estimation and classification and reduce the complexity. Furthermore, the problem of different conditions/datasets should be analyzed, and the proposed algorithm needs to be validated by using the vibration and acoustic emission datasets with various motor speeds, torque loads, and crack sizes.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}