
Dynamic Torque Coordinated Control Considering Engine Starting Conditions for a Power-Split Plug-In Hybrid Electric Vehicle



Abstract
:1. Introduction
2. Powertrain Dynamic Model
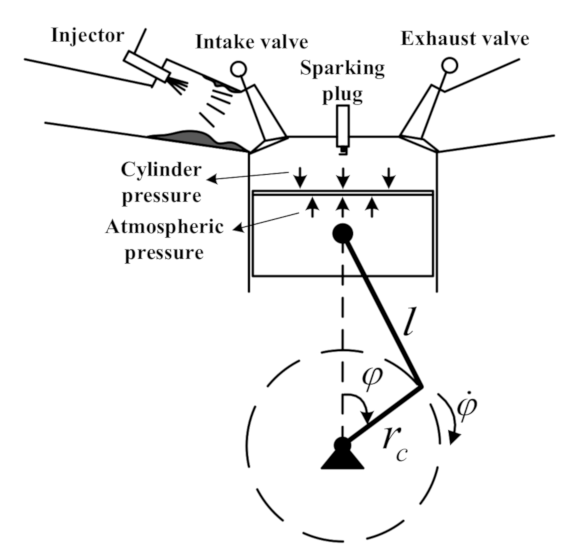
2.1. Dynamic Engine Model.
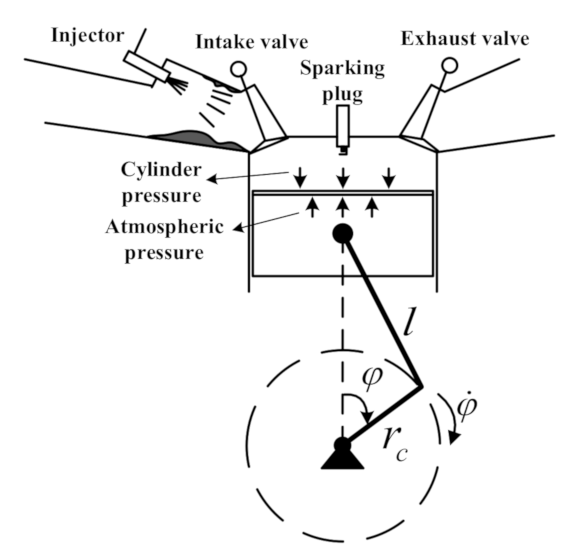
2.1.1. Engine Thermodynamic Model in the Cylinder
2.1.2. Engine Pulsating Torque Model
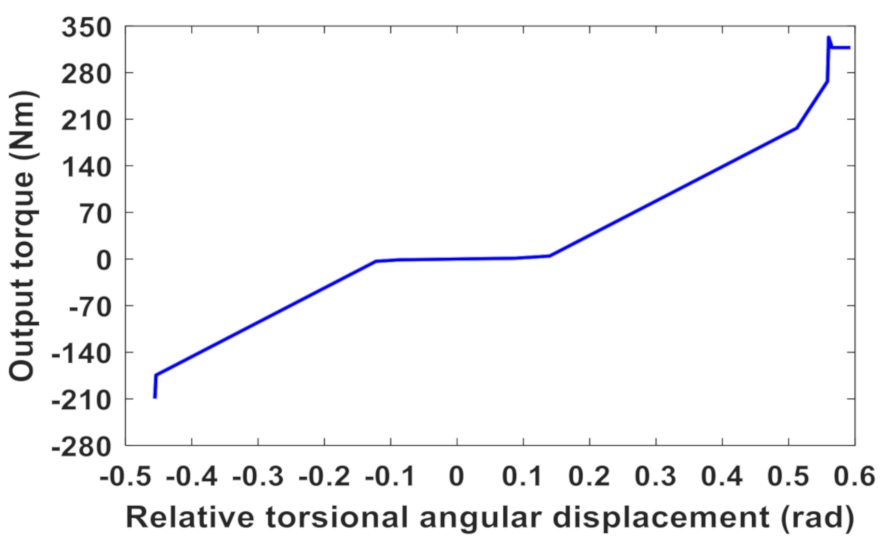
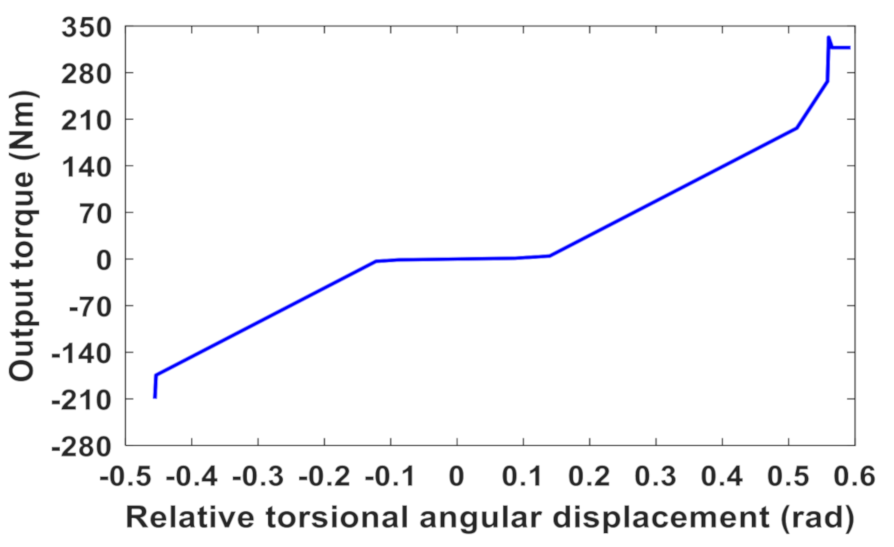
2.2. Model of Torsional Damper Spring
2.3. Motor Dynamic Model
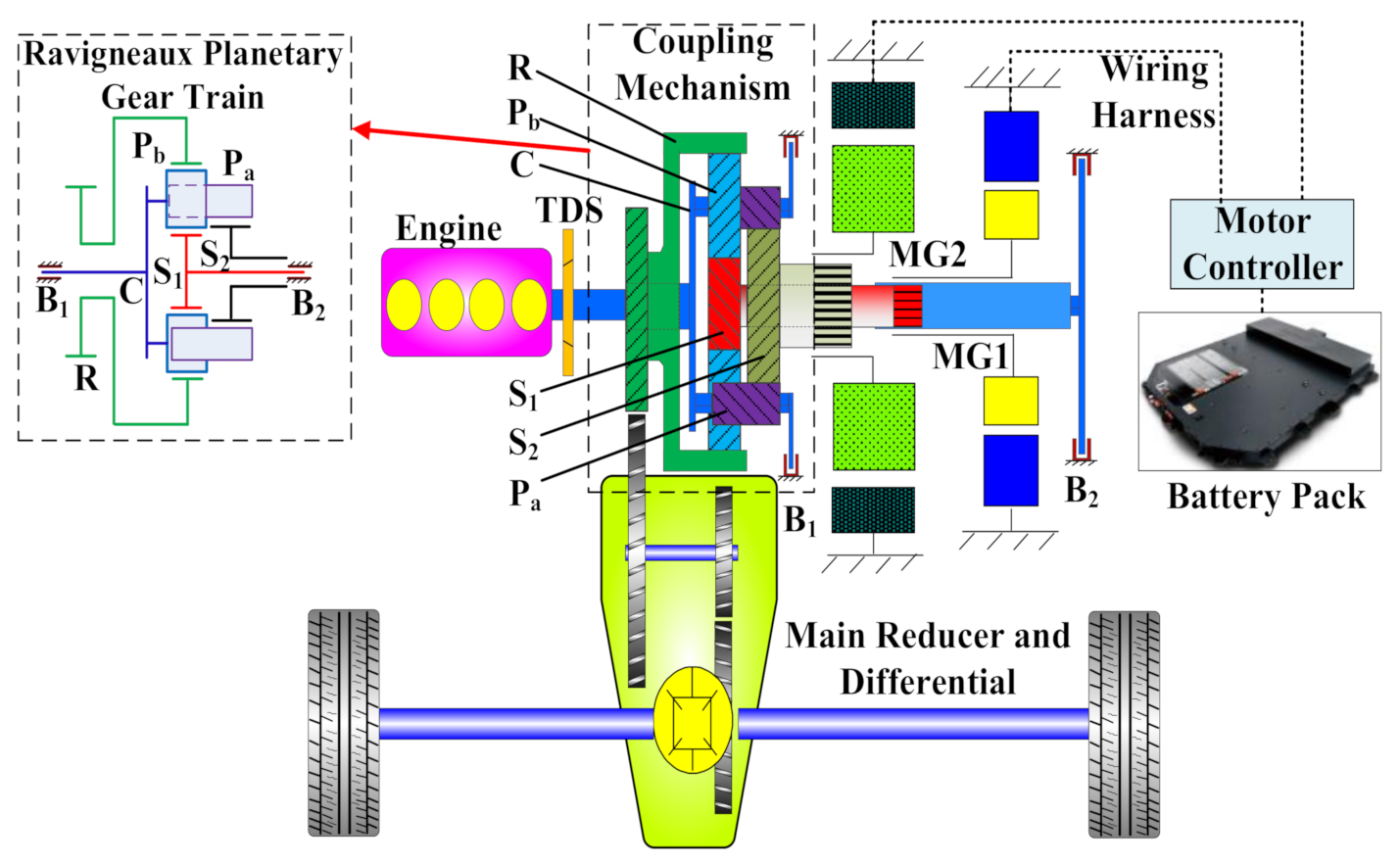
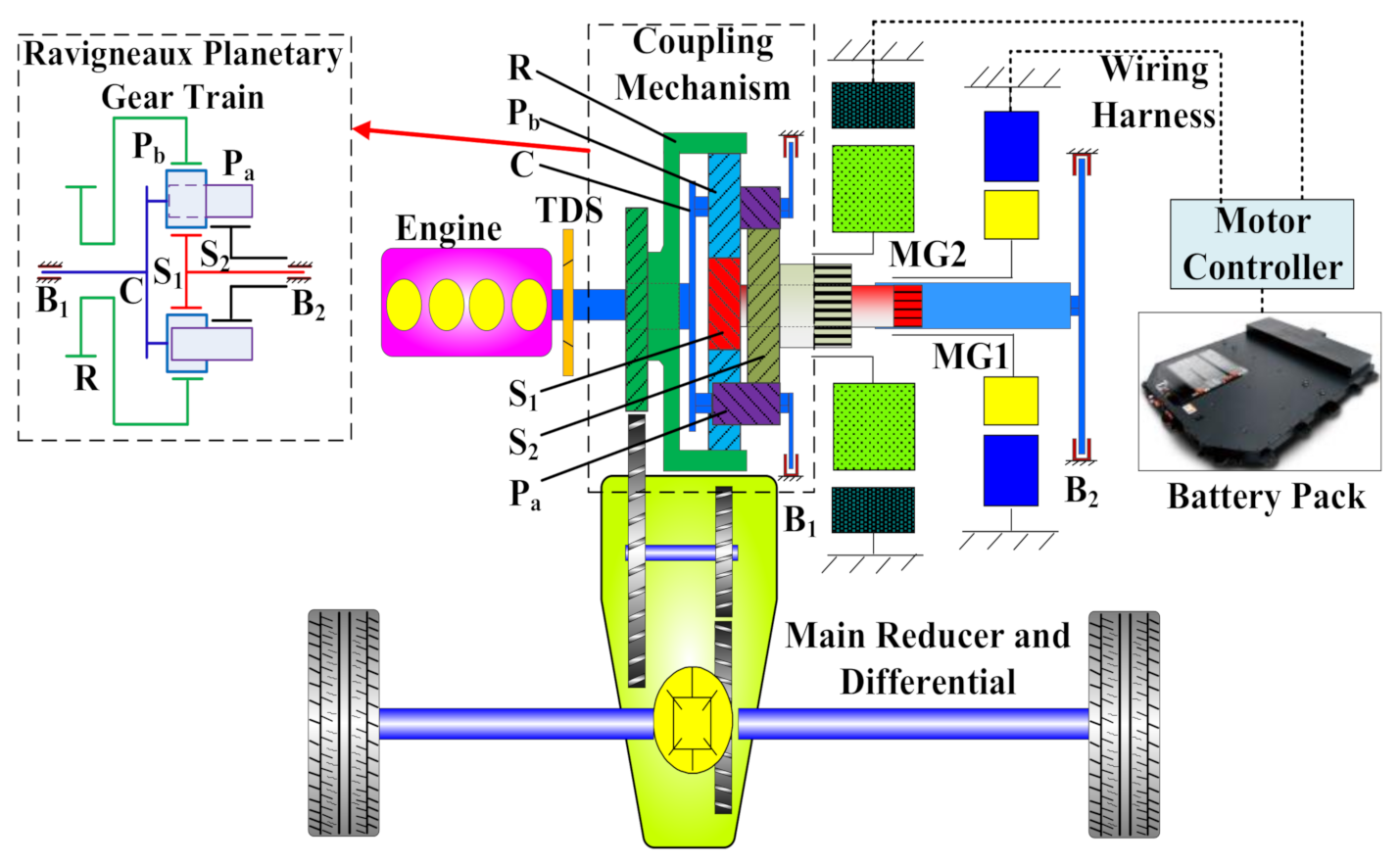
2.4. Coupling Mechanism Modeling
2.5. Brake Dynamic Model
2.6. Vehicle Dynamic Model in Longitudinal Direction
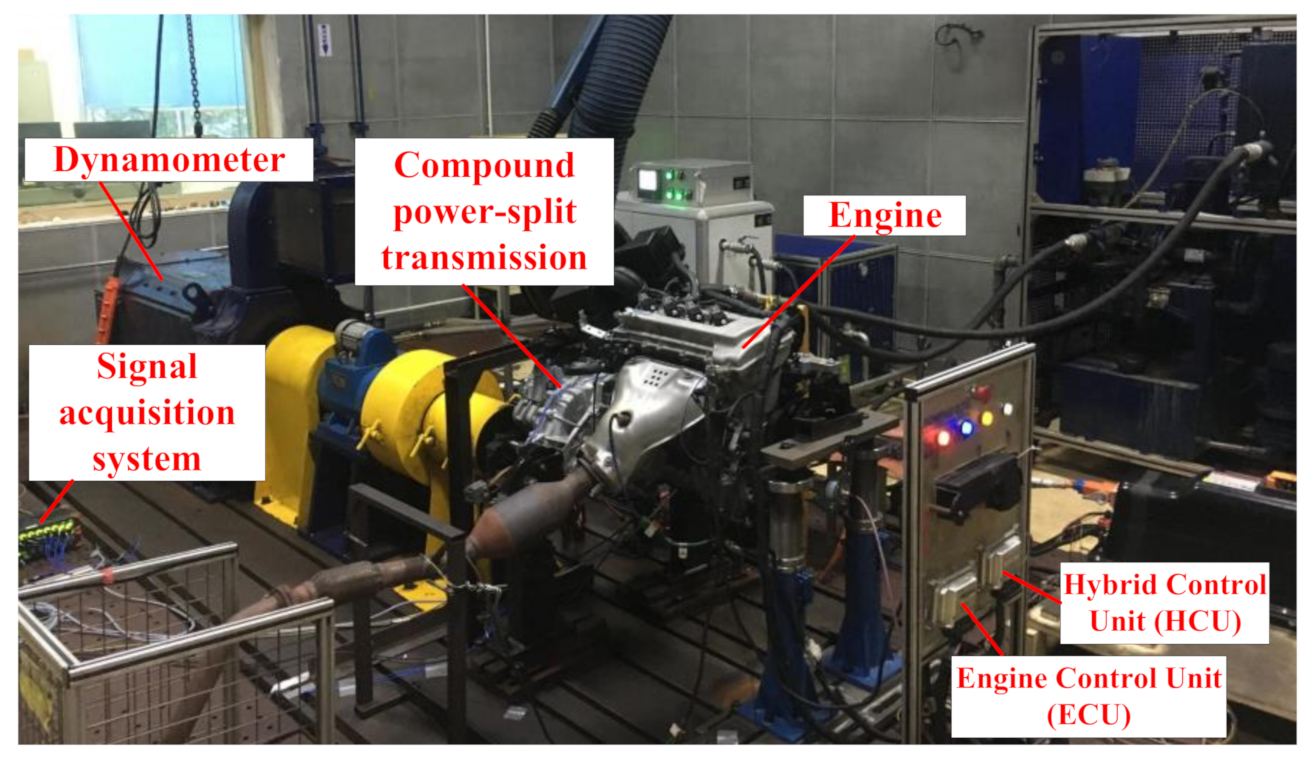
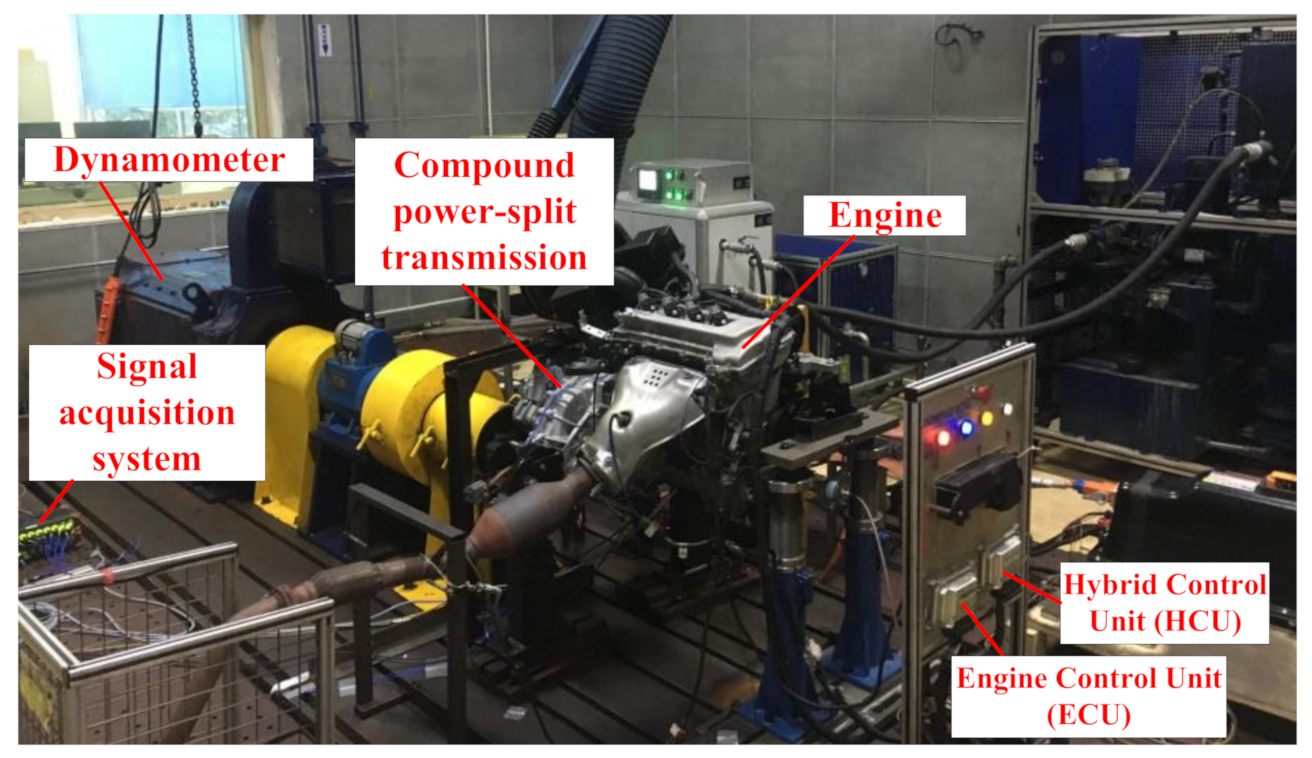
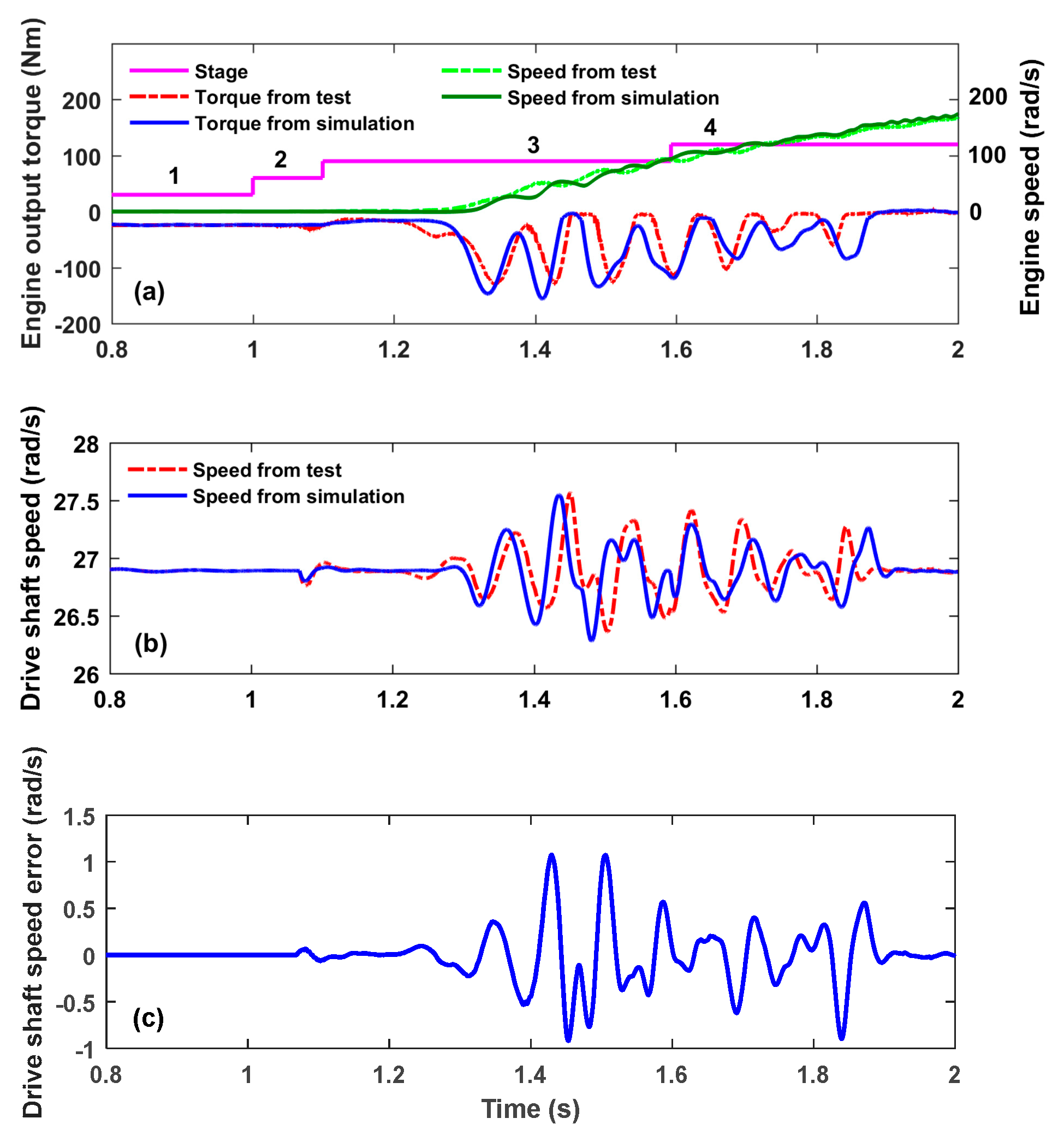
2.7. Validation of PS-PHEV Powertrain Model
3. Dynamic Analysis and Problem Description during Engine Starting Process
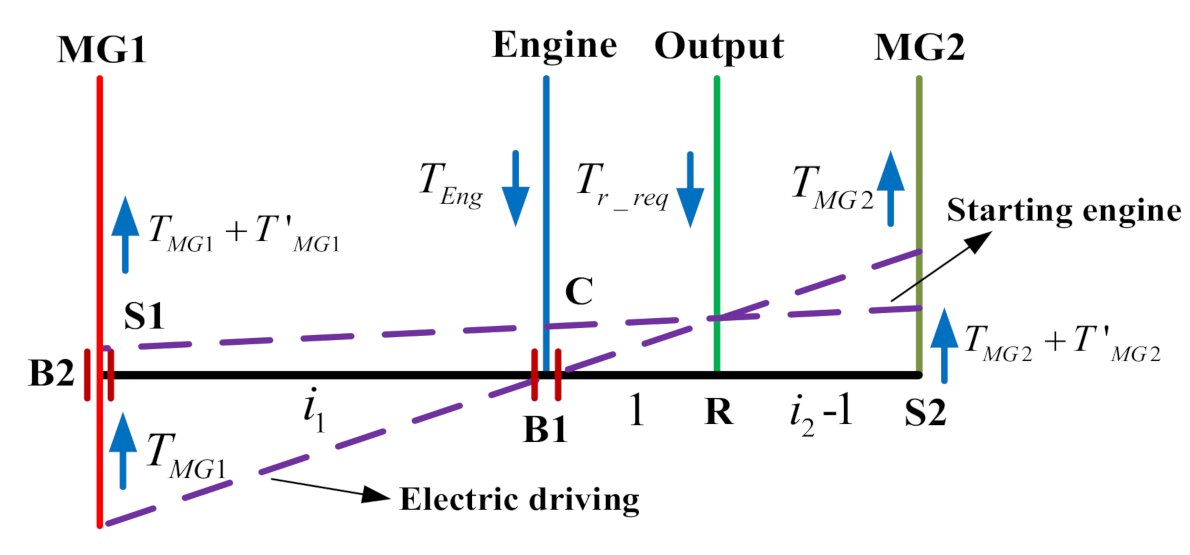
3.1. Dynamic Analysis during Engine Starting Process
3.2. Problem Description during Engine Starting Process
4. Design of Dynamic Torque-Coordinated Control That Considers Engine Starting Conditions
- (1)
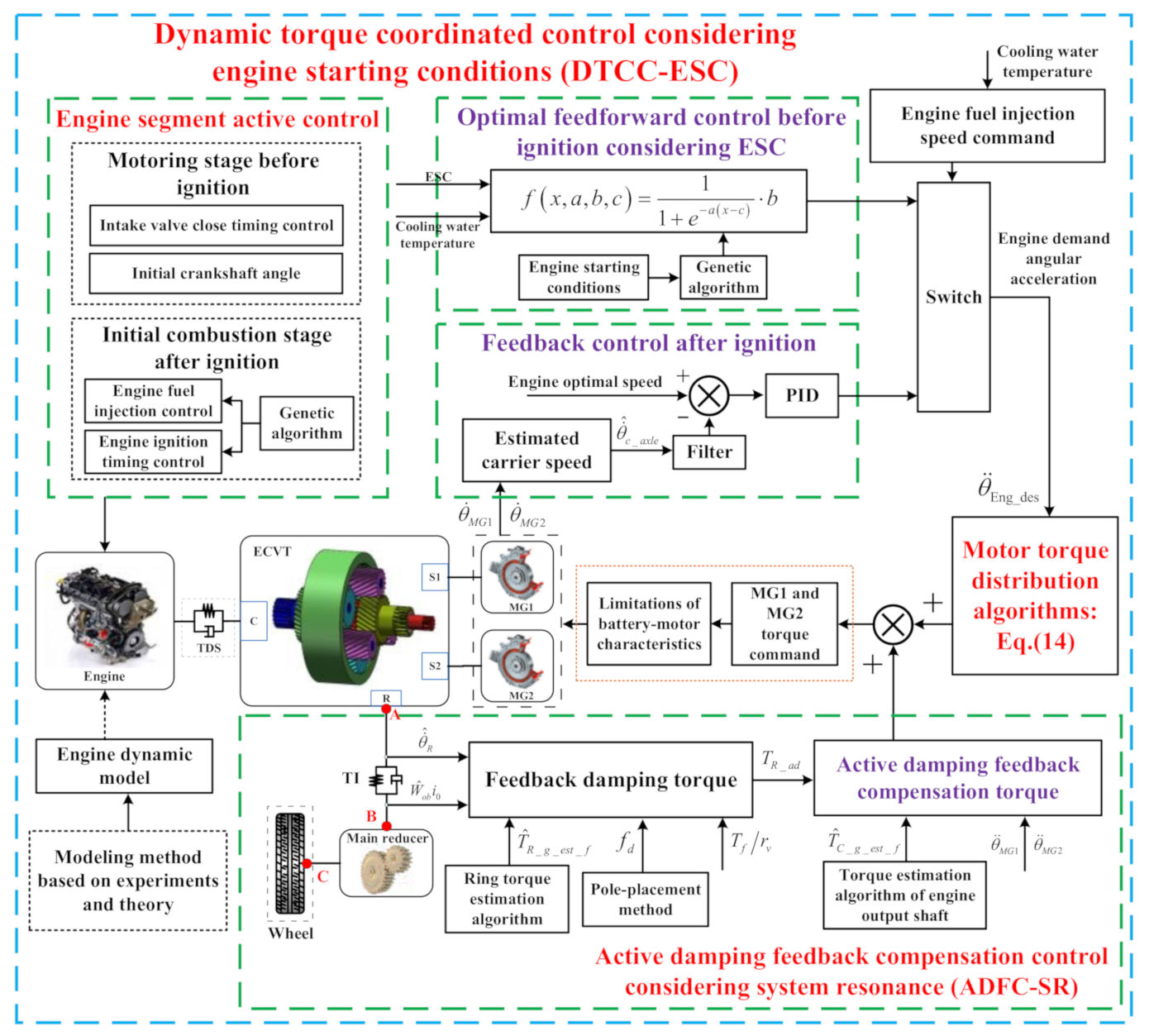
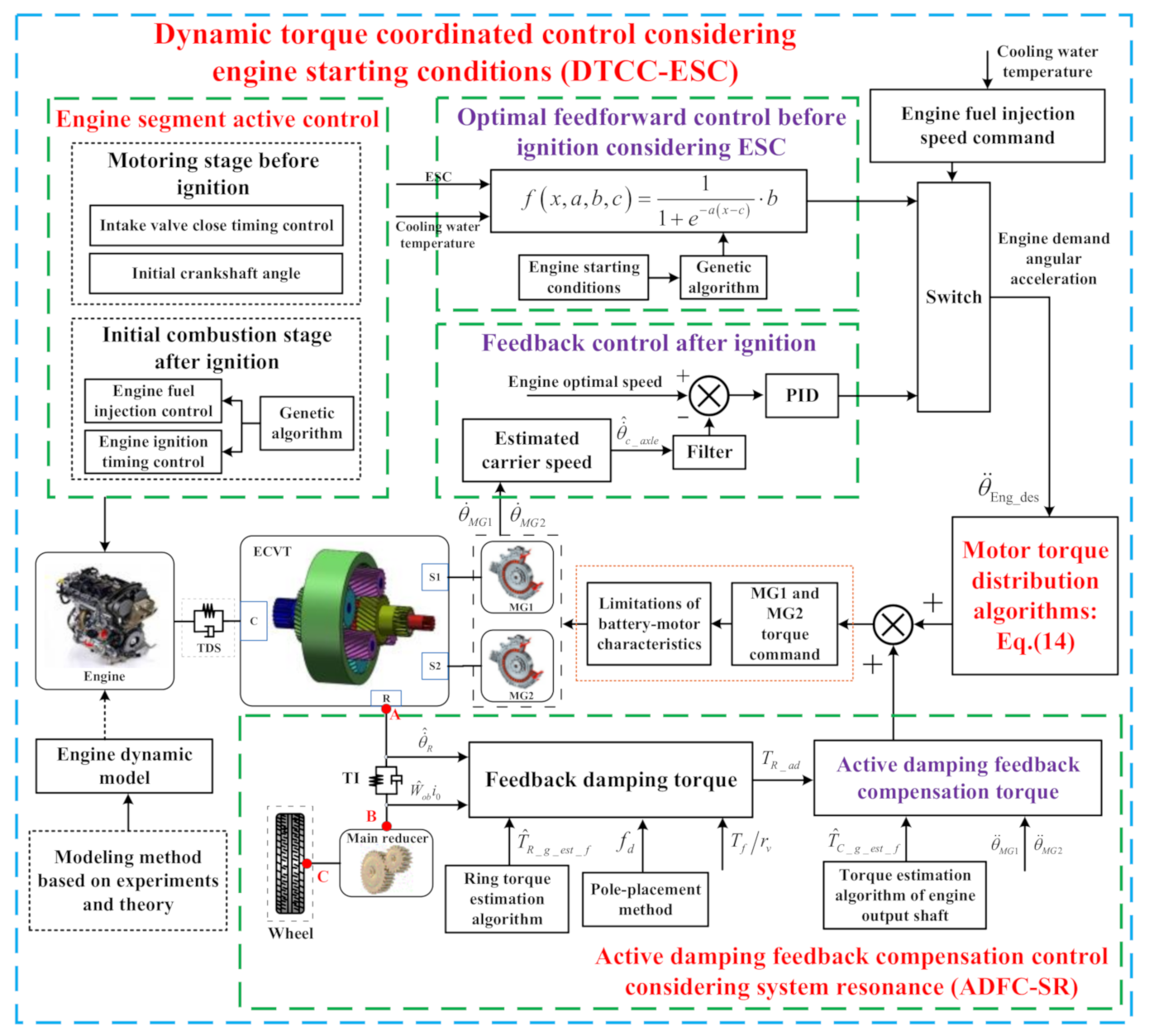
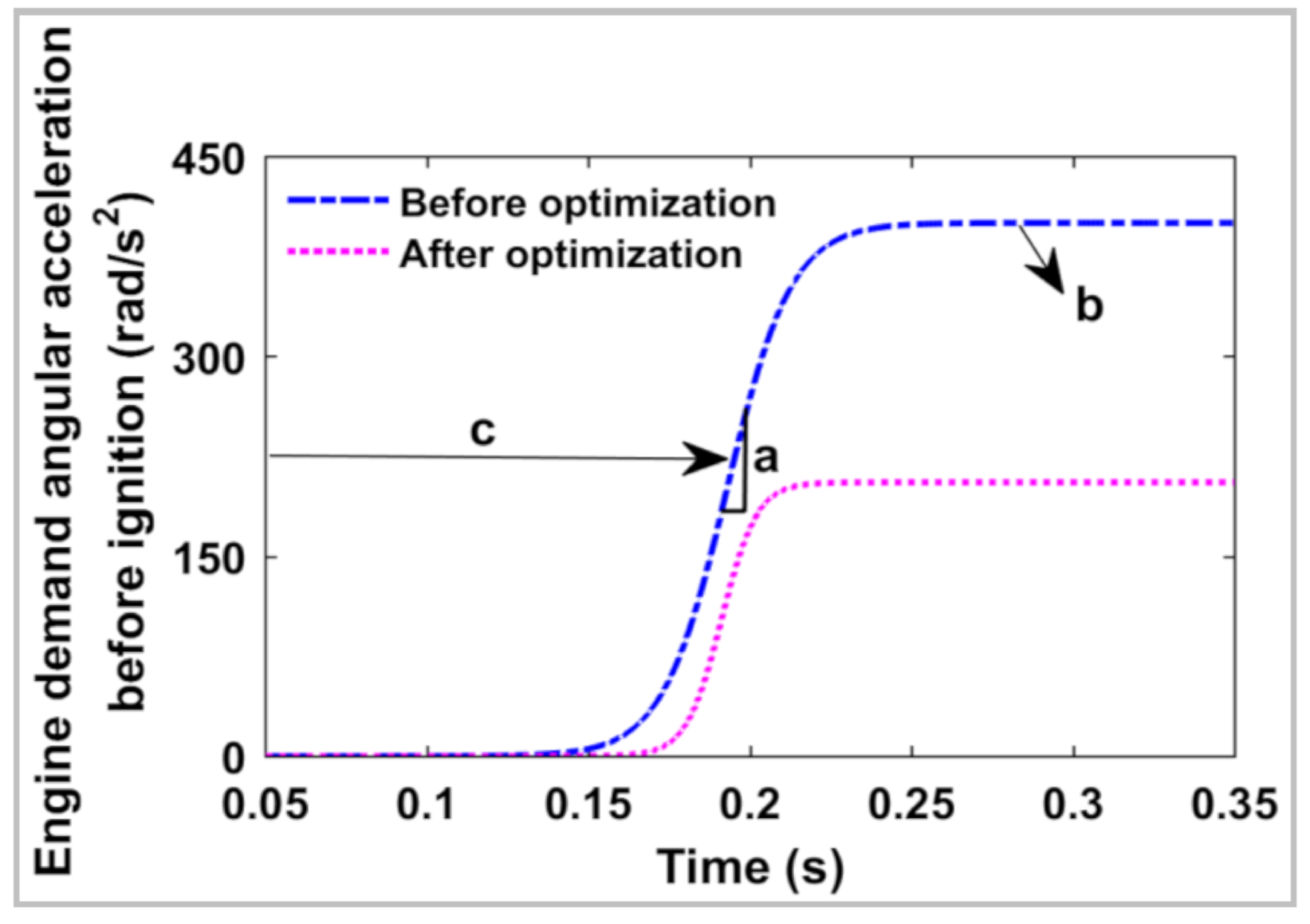
- The engine segment active control, also known as the engine transient torque control before and after the engine ignition, is used to reduce the impact of the ERT on system shocks and vibrations in the engine startup from the perspective of the engine power source. Regarding this engine segment active control: before ignition, the inputs of control are the engine’s intake valve close timing (IVCT) and initial crankshaft angle (ICA); after ignition, the inputs of control are fuel injection and engine ignition timing optimized by a genetic algorithm based on the engine working cycle. The output of the control is the engine output torque.
- (2)
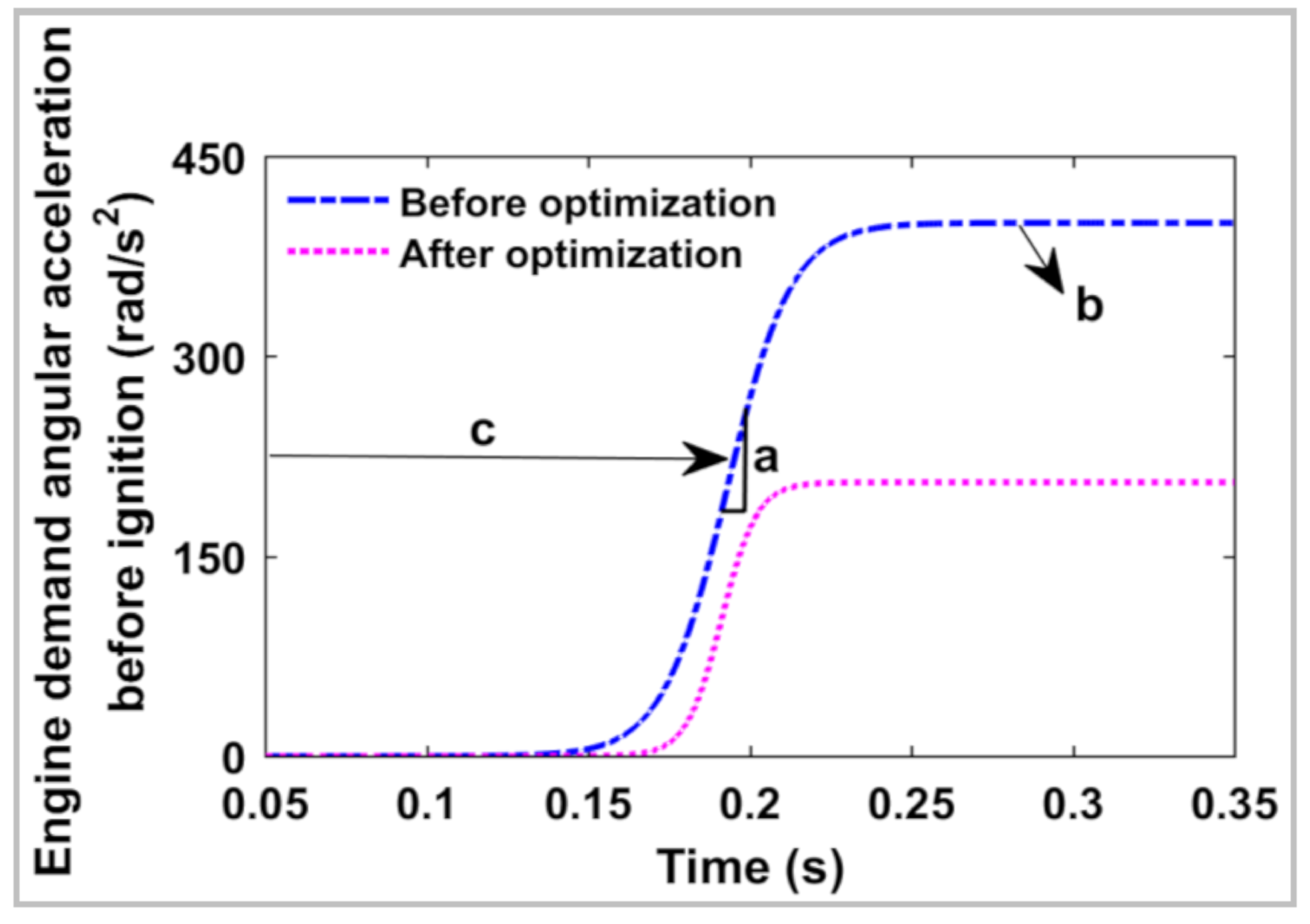
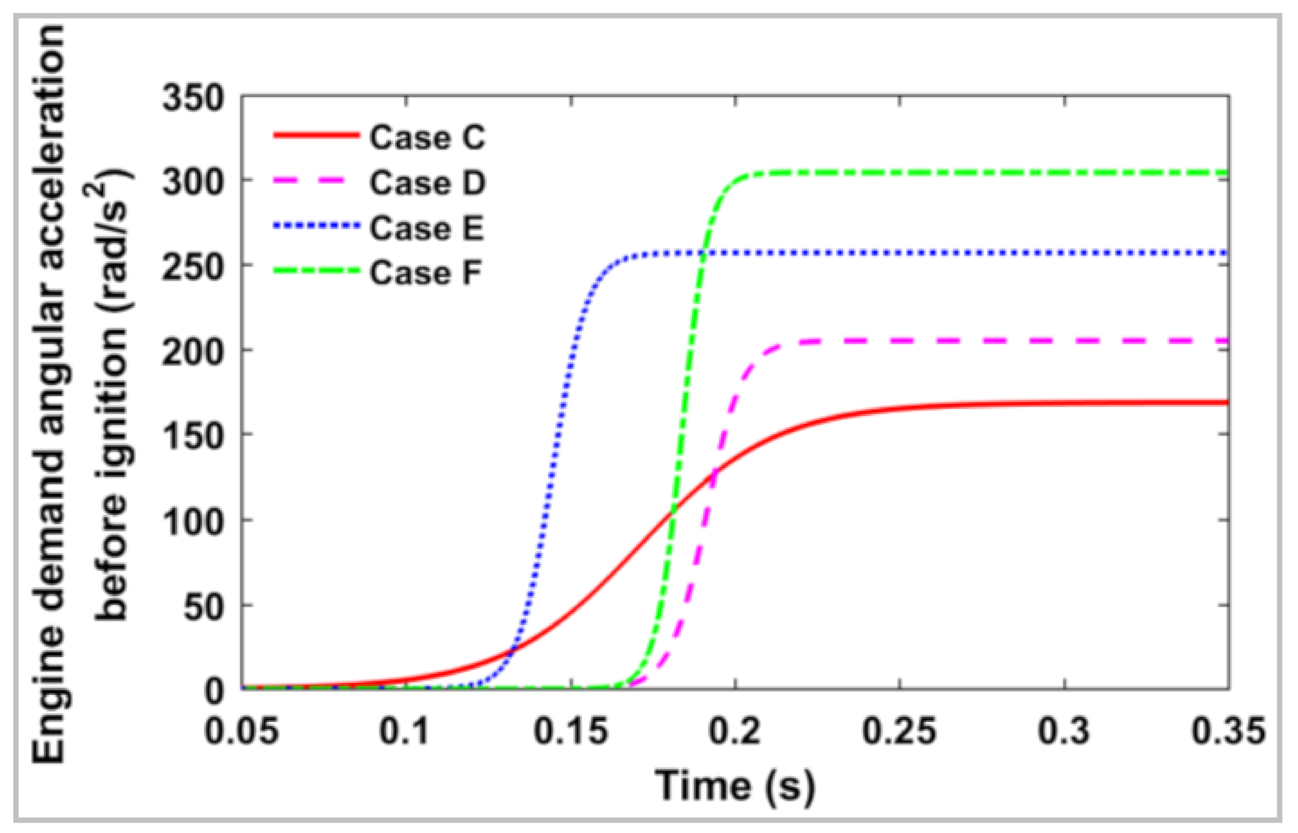
- Feedforward and feedback control of engine starting is mainly realized by solving the motor torque distribution algorithm from Equation (14) through different engine demand angular accelerations before and after ignition. For the feedforward and feedback control of the engine startup, the inputs of control are a) the required angular acceleration of the engine based on the engine starting conditions before ignition and b) the required angular acceleration of the engine based on the engine optimal target speed after ignition. The outputs of control are the distributed torques of the two motors based on Equation (14).
- (3)
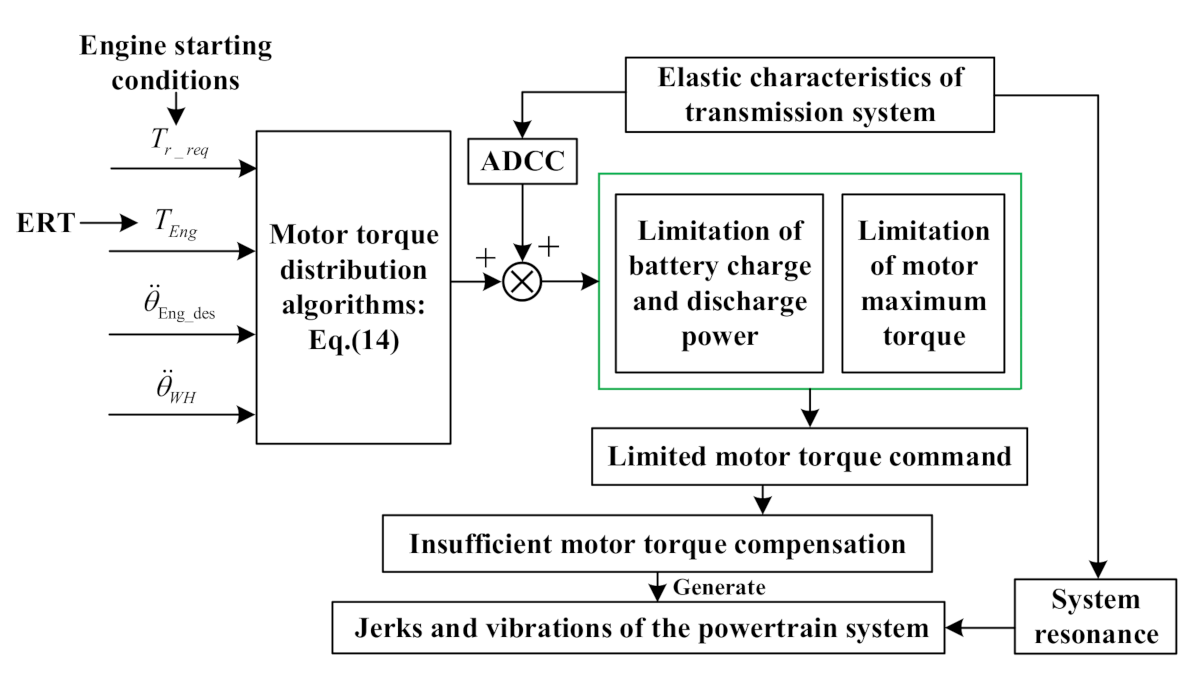
- The active damping feedback compensation control for the system resonance (ADFC-SR) is adopted to restrain the vibration of the transmission system. The inputs of the ADFC-SR are the estimated ring speed and torque, the estimated engine output shaft torque, and the estimated wheel speed. Its outputs are the active damping feedback compensation control torques from Equation (22).
4.1. Engine Segment Active Control
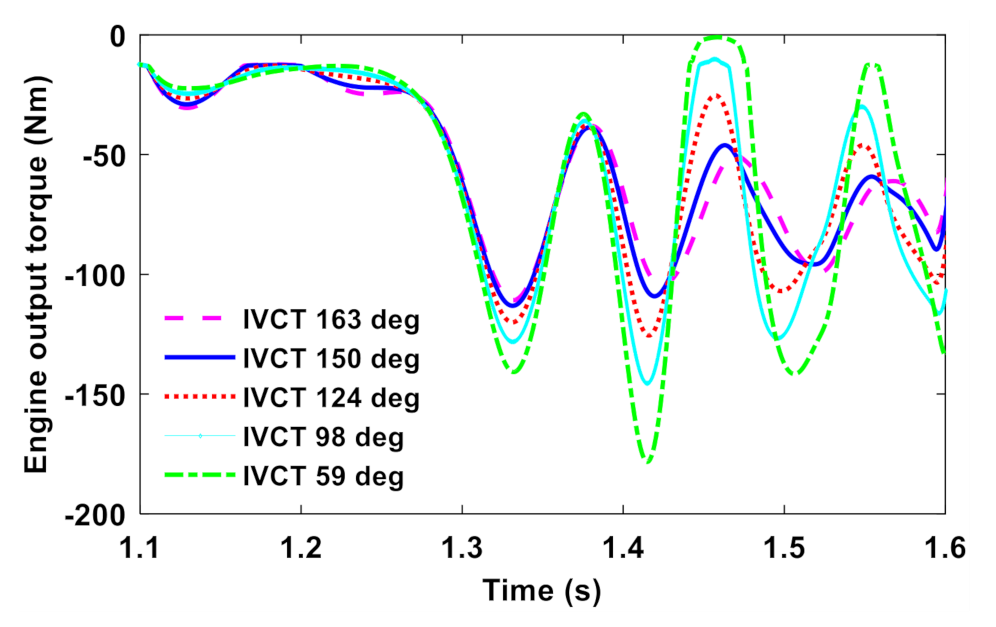
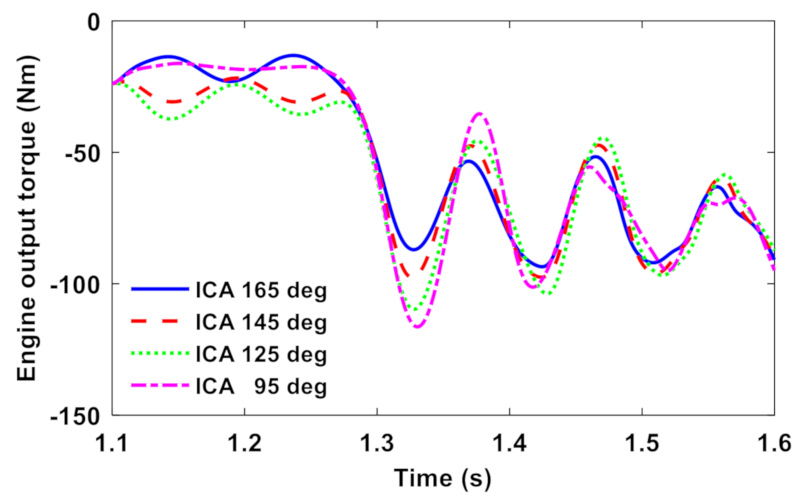
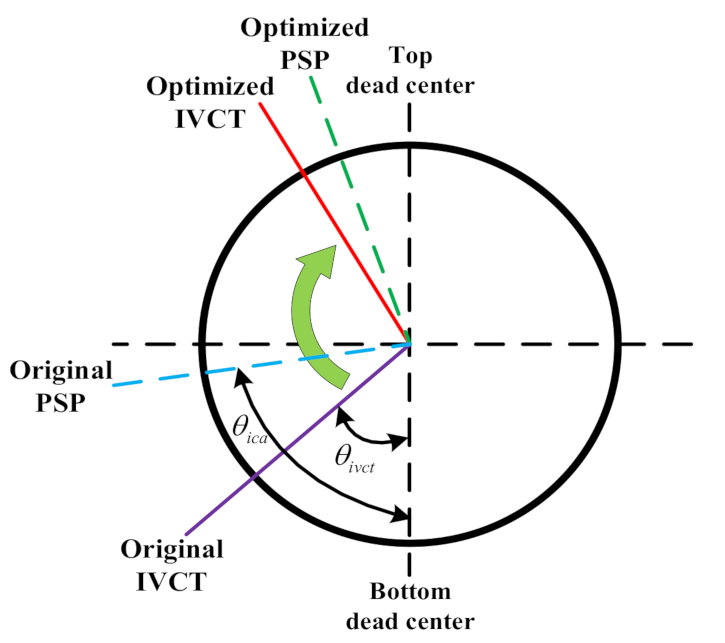
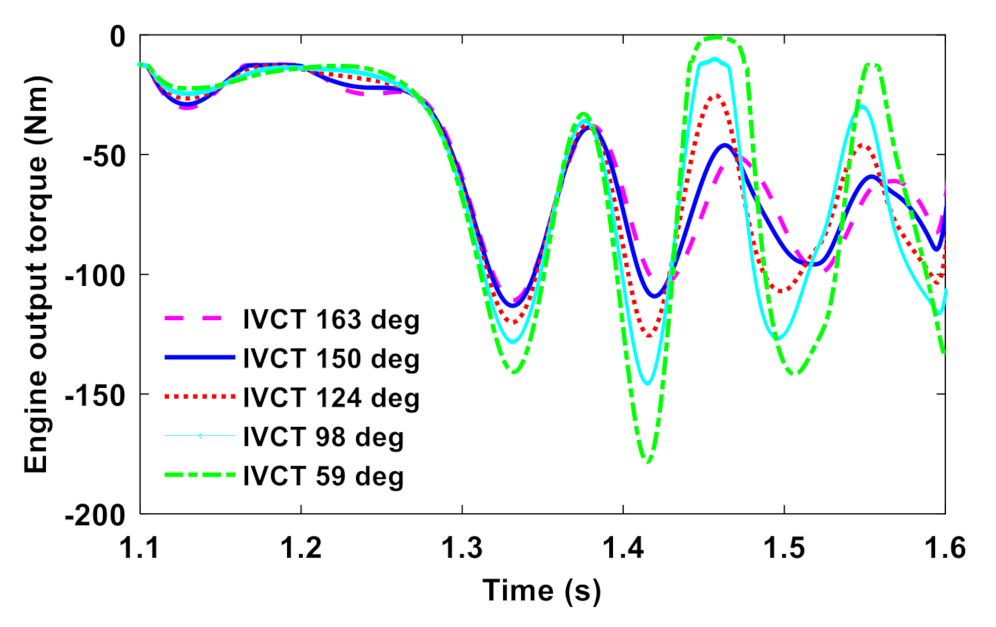
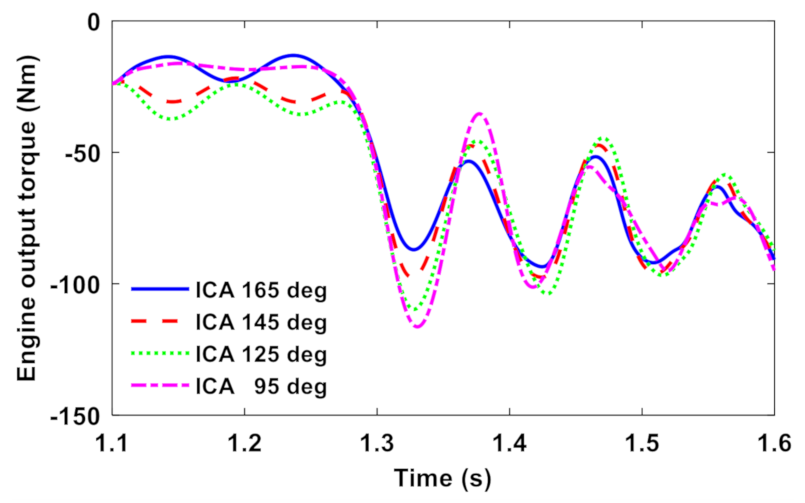
4.1.1. Intake Valve Close Timing Control before Ignition
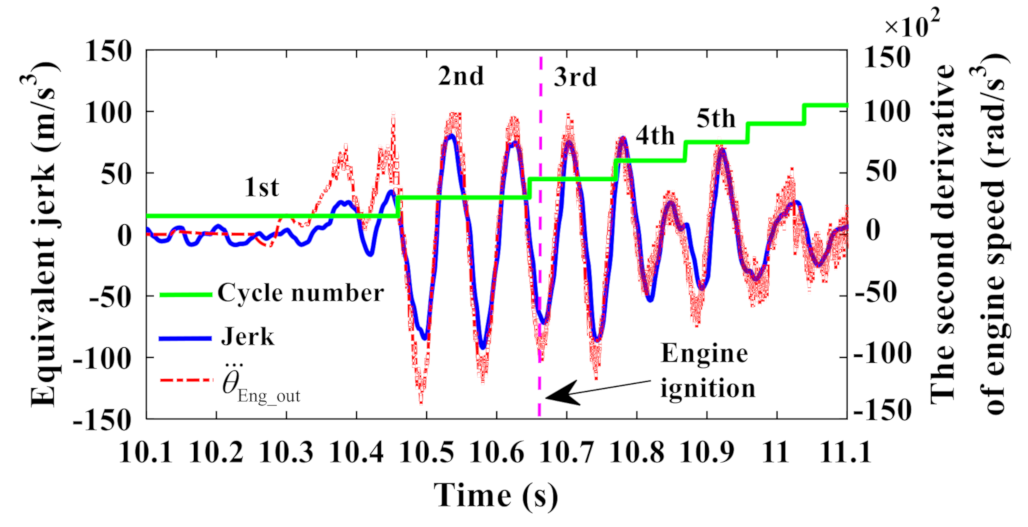
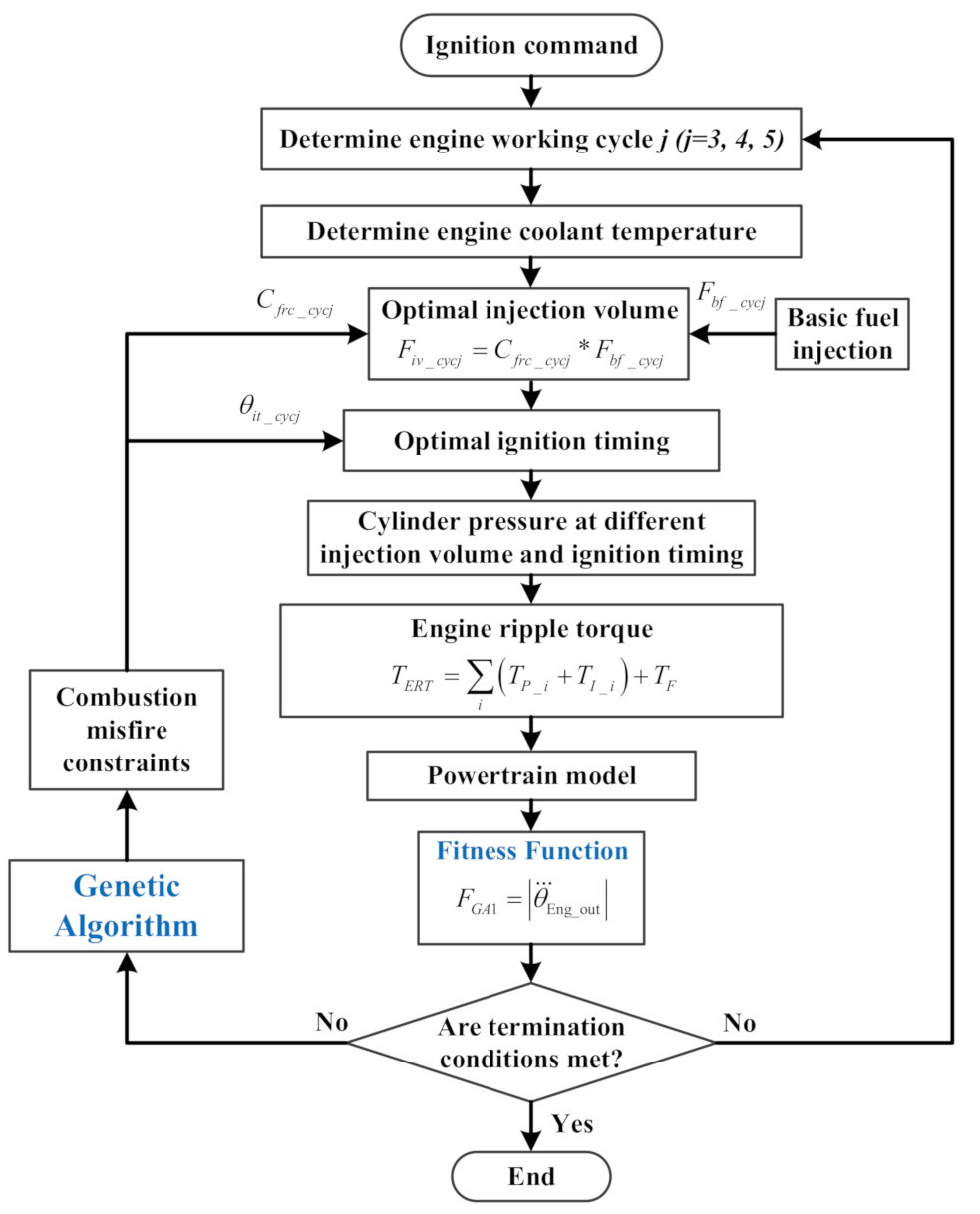
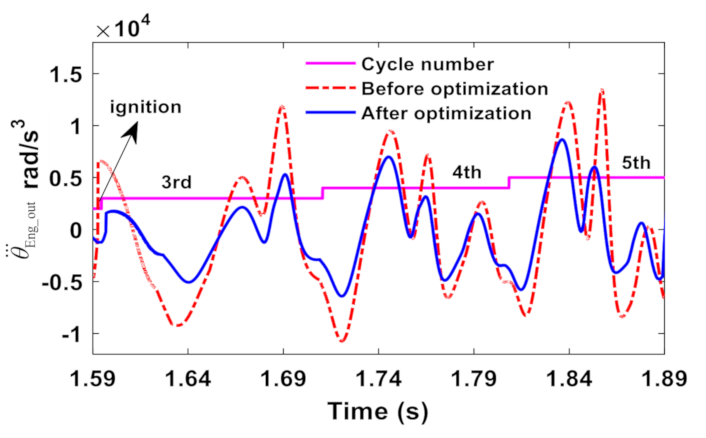
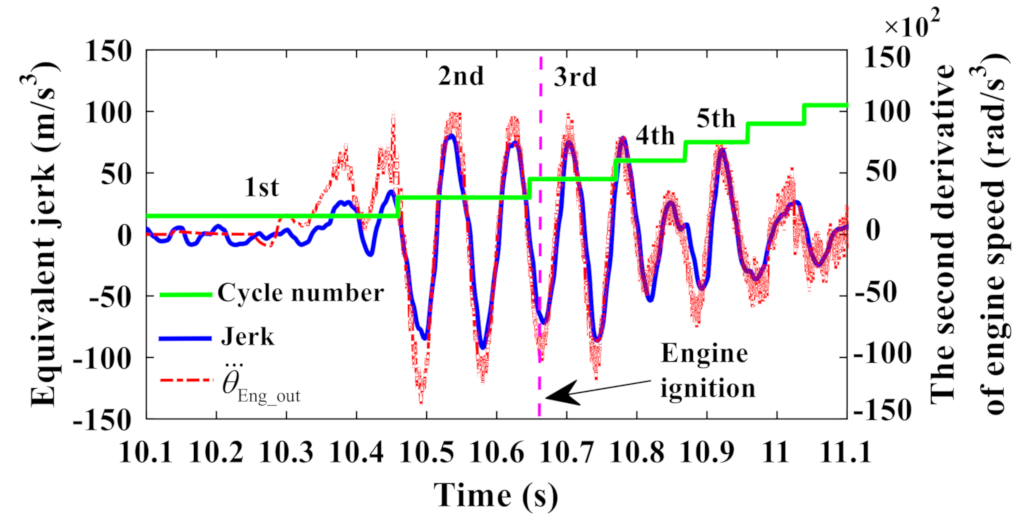
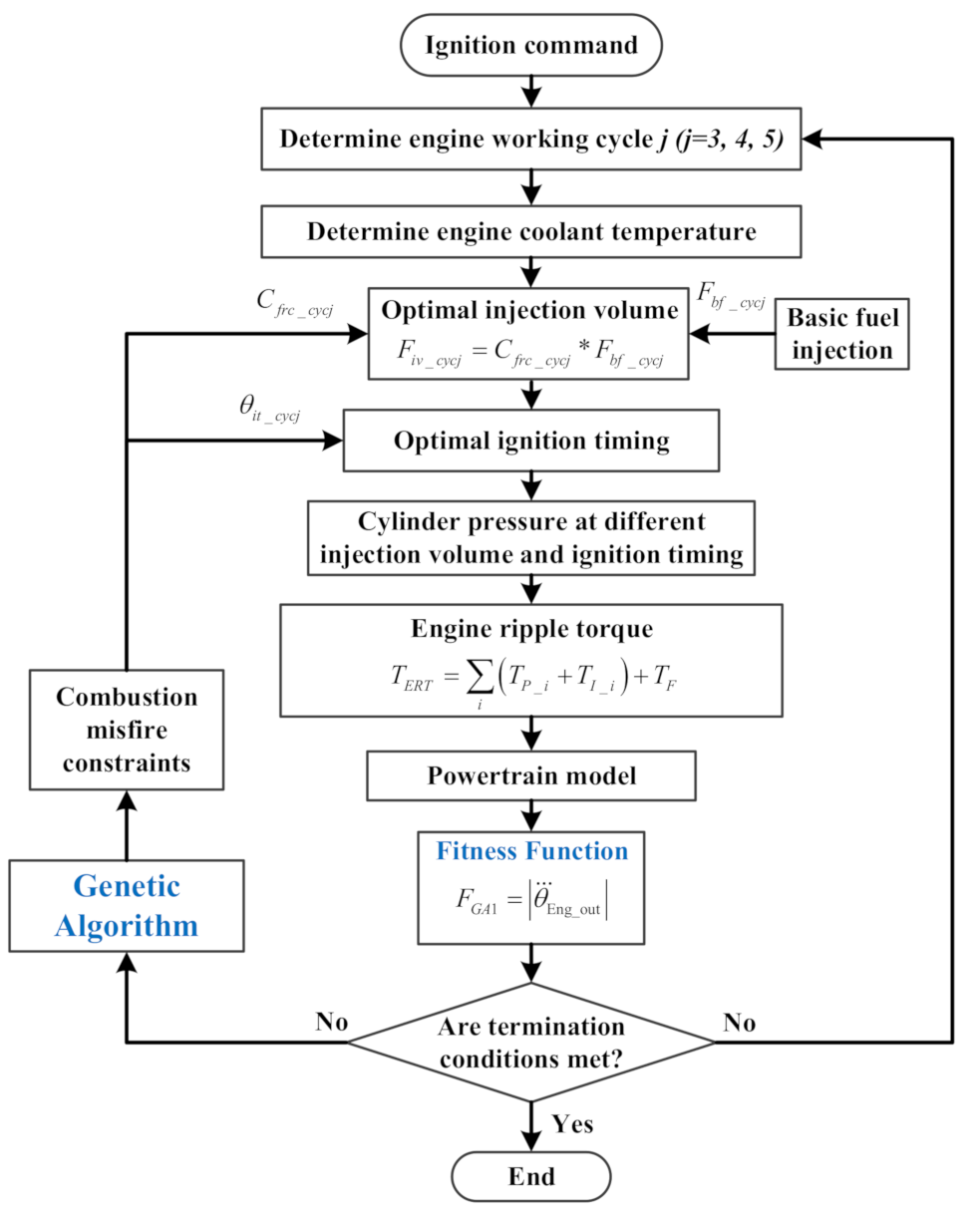
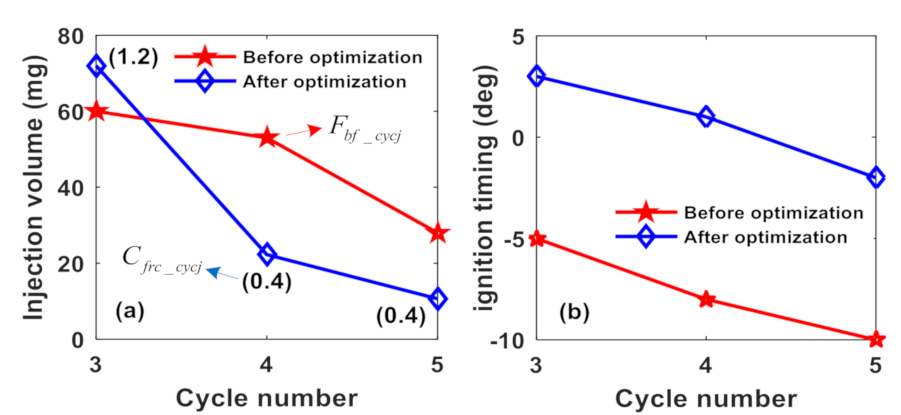
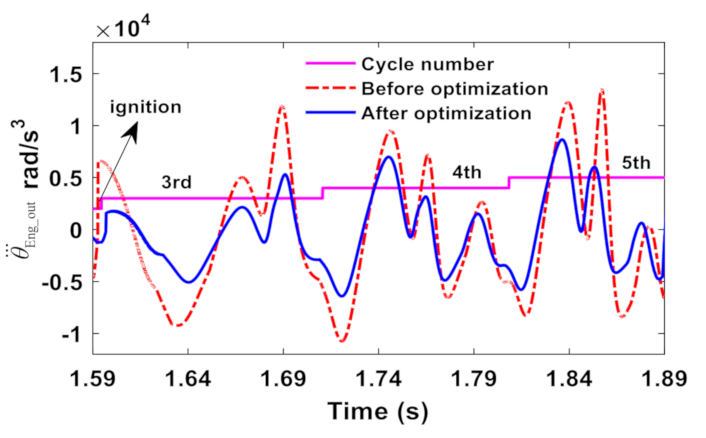
4.1.2. Controls of Engine Fuel Injection and Ignition Timing
4.2. Feedforward and Feedback Controls of Engine Starting
4.2.1. Feedforward Control before Ignition
4.2.2. Feedback Control after Ignition
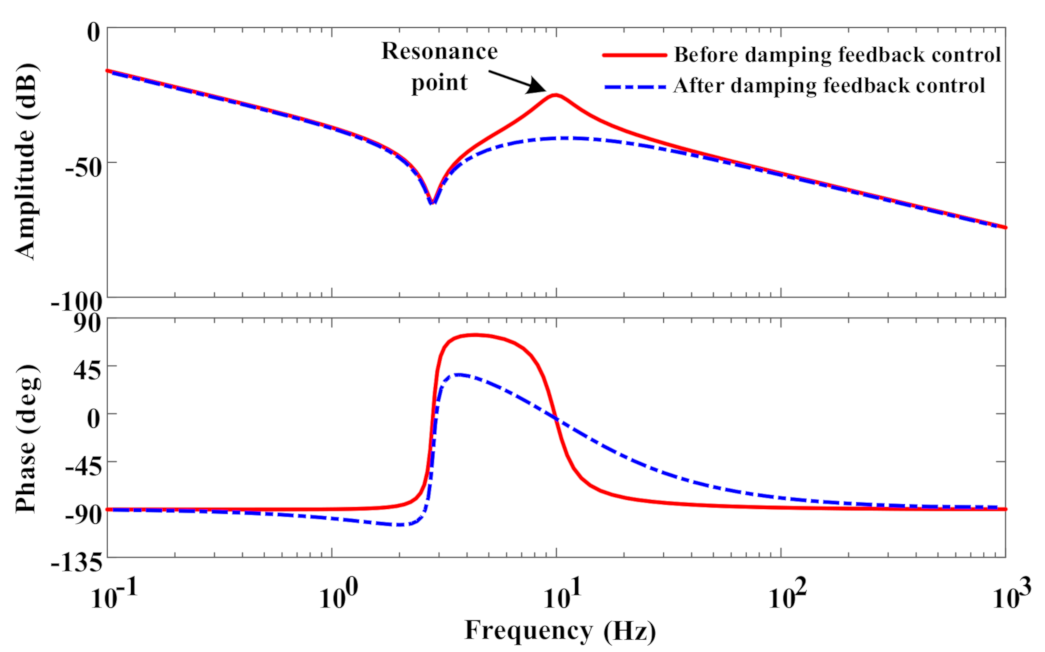
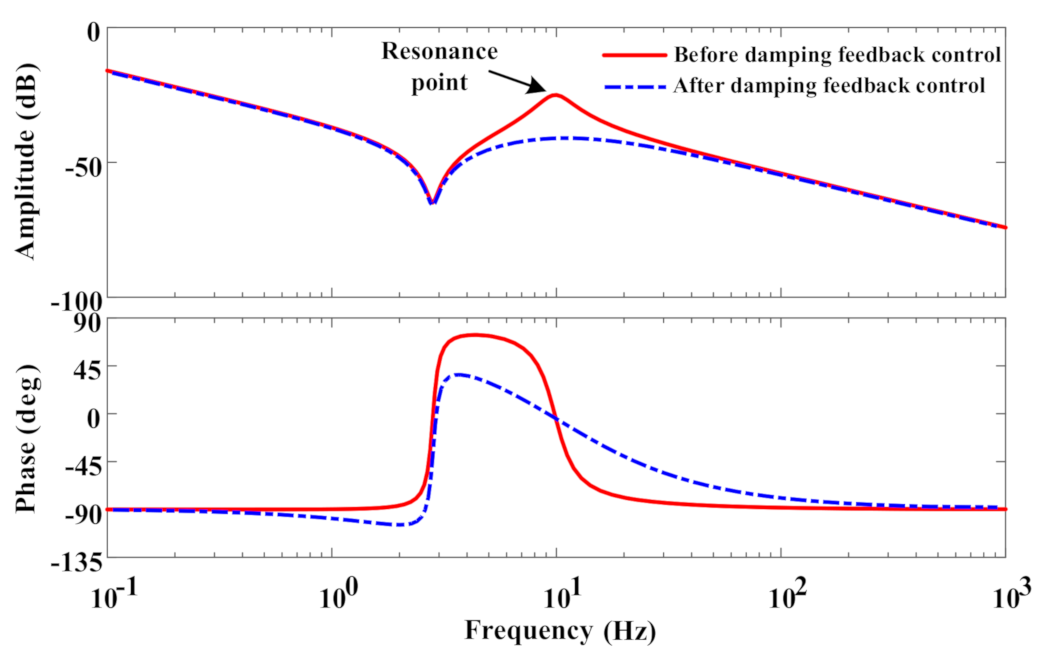
4.3. Active Damping Feedback Compensation Control Considering System Resonance
4.3.1. Active Damping Feedback Compensation Torques
4.3.2. Wheel Speed Estimation
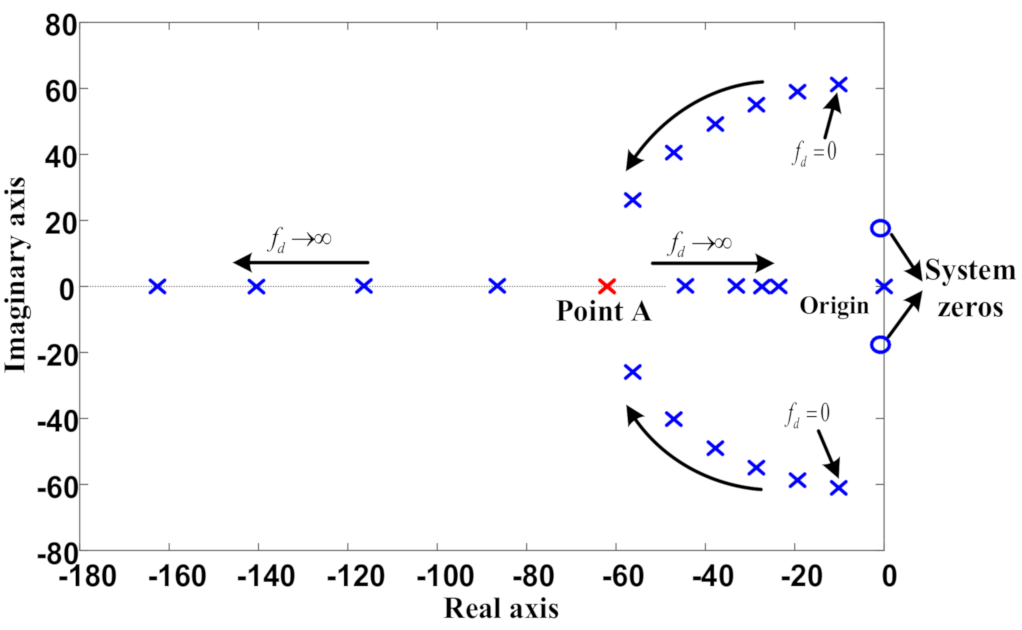
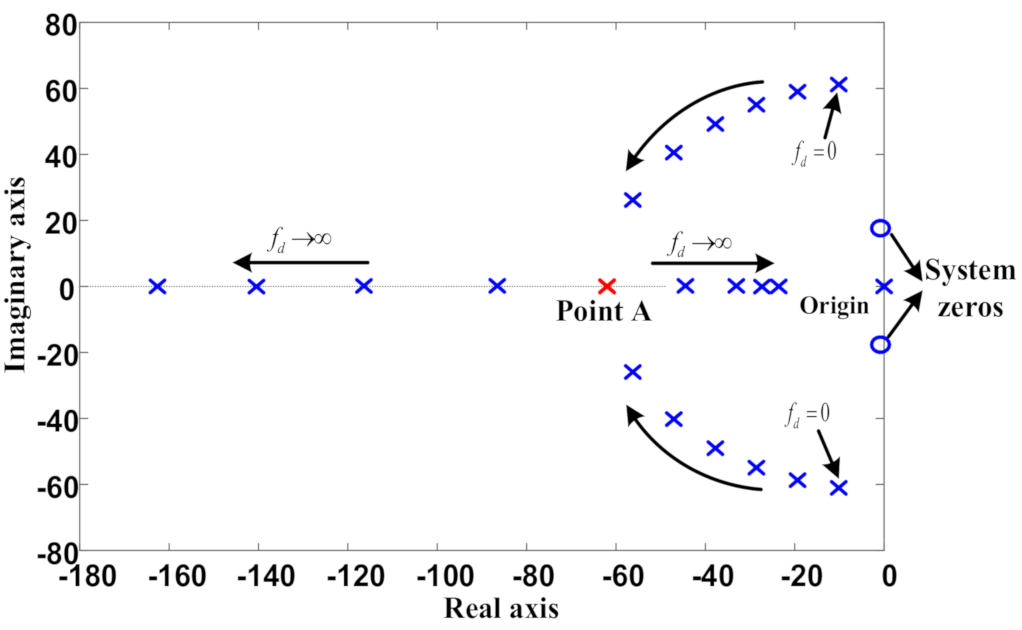
4.3.3. Determination of Feedback Gain Damping Coefficient
5. Simulations and Assessments
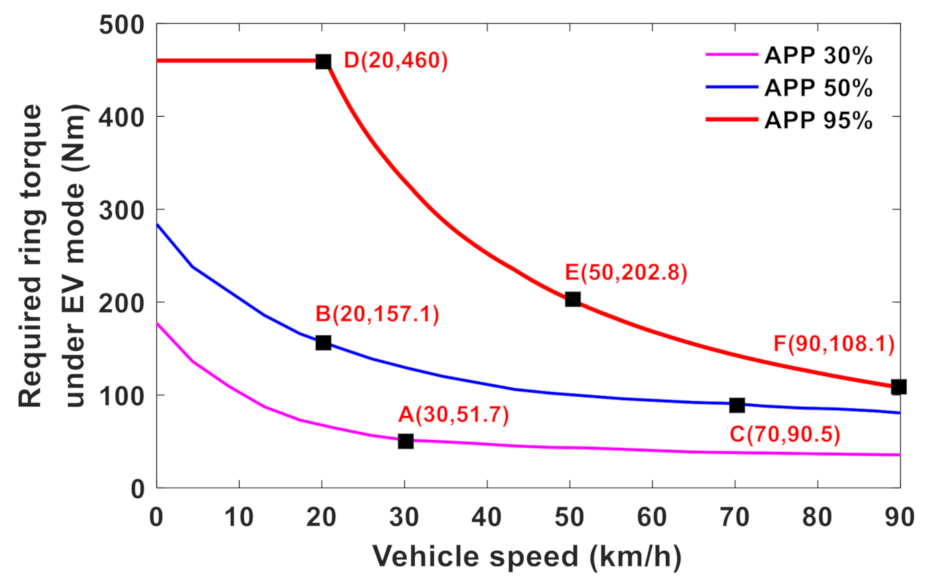
5.1. Simulation Conditions
5.2. Comparative Analysis of Different Control Methods
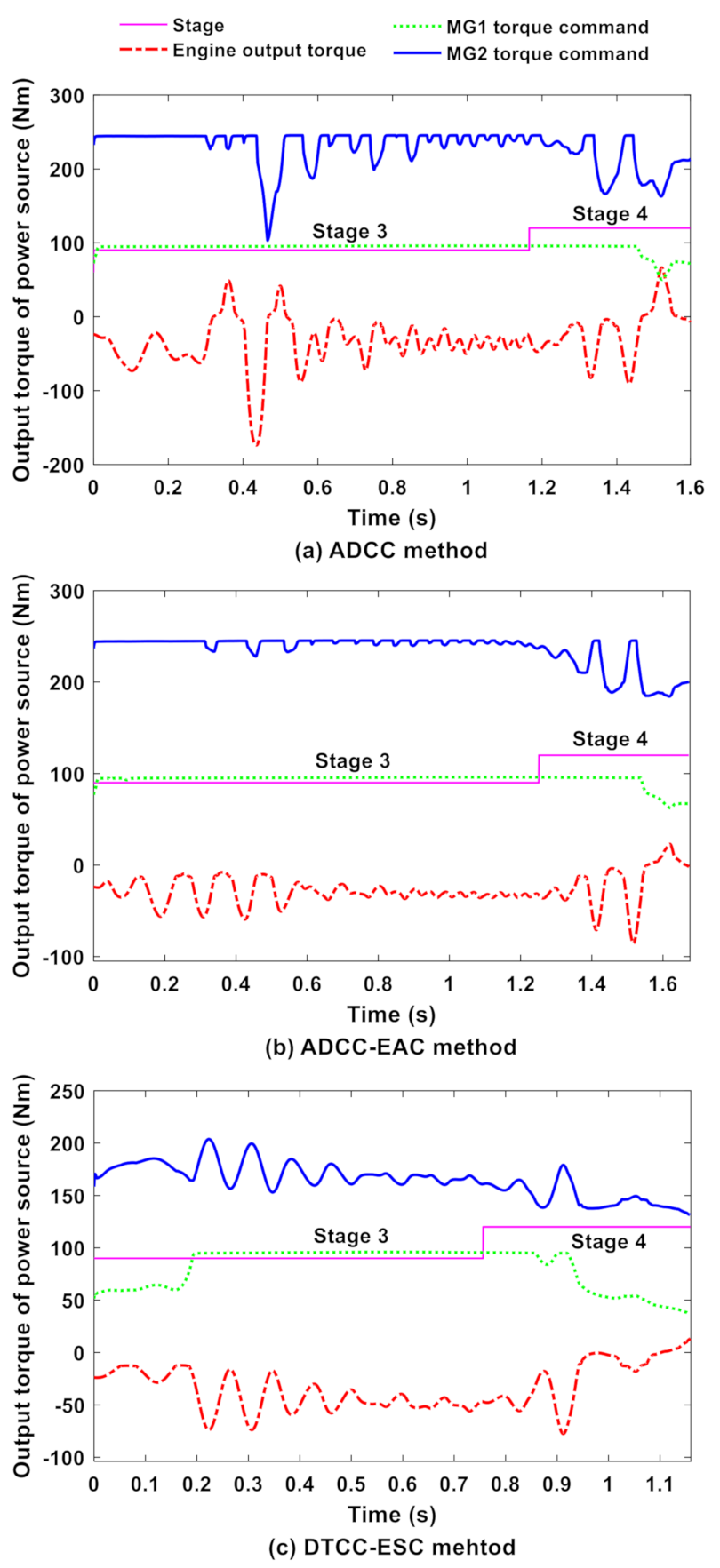
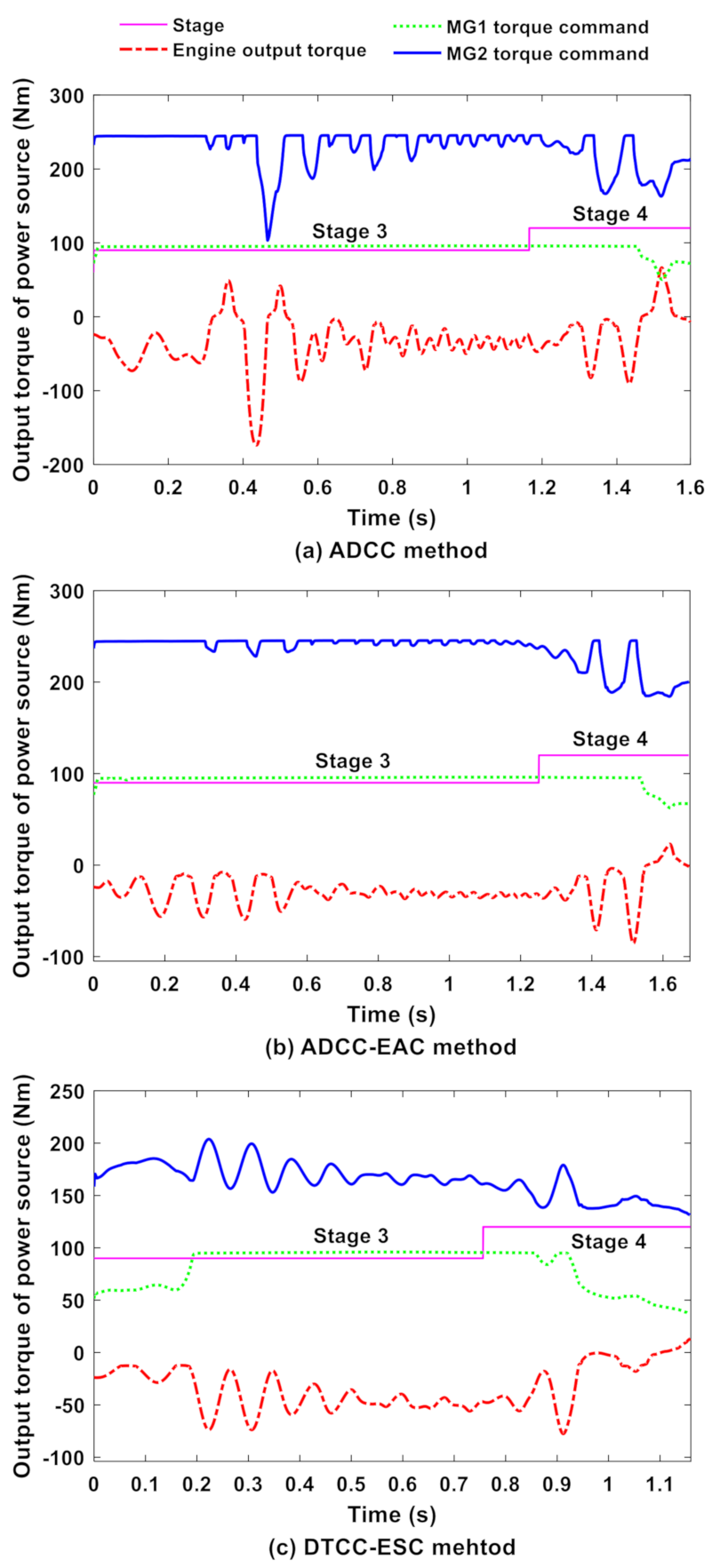
5.2.1. Results of Three Control Methods under Case D
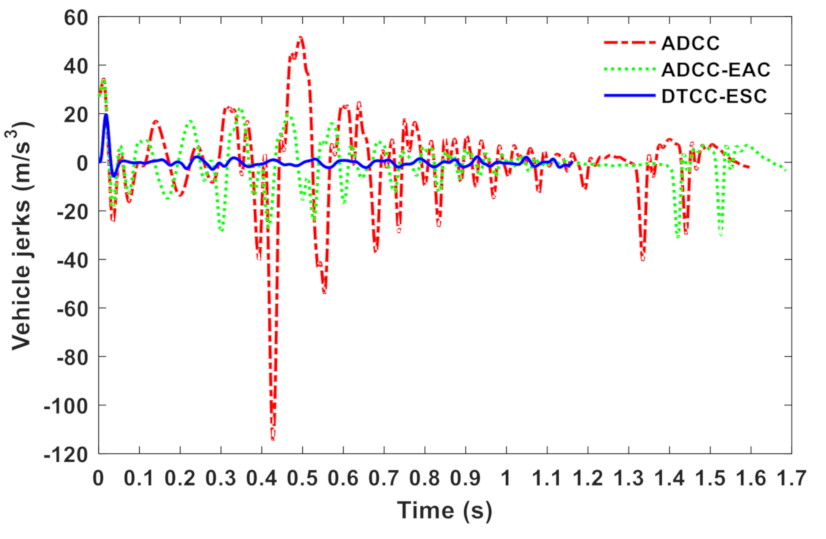
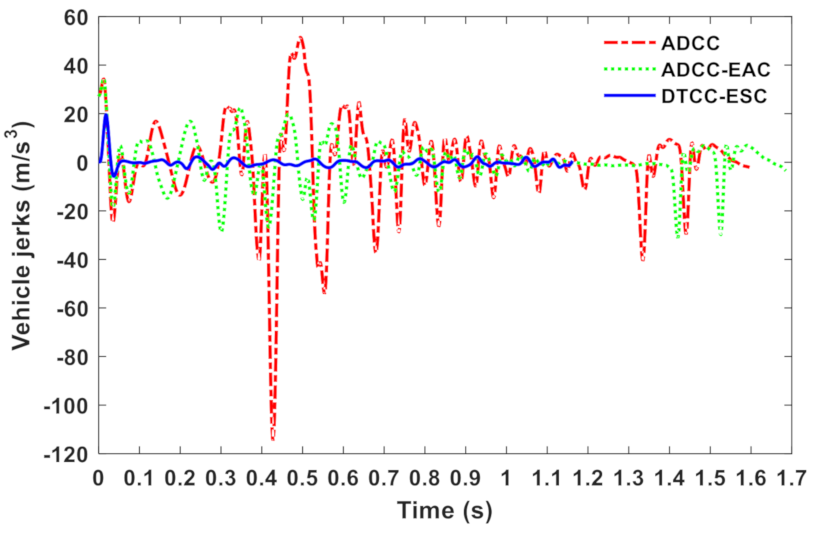
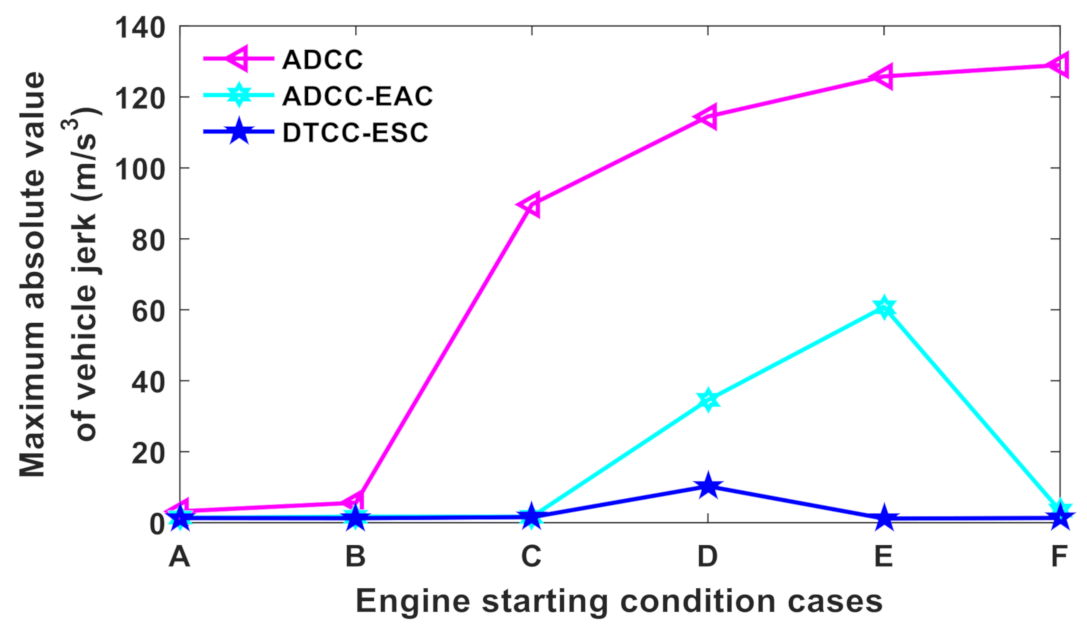
5.2.2. Jerk Analysis under Different Engine Starting Conditions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADCC | Active damping compensation control |
| ADCC-EAC | Active damping compensation control with engine active control |
| ADFC-SR | Active damping feedback compensation control considering the system resonance |
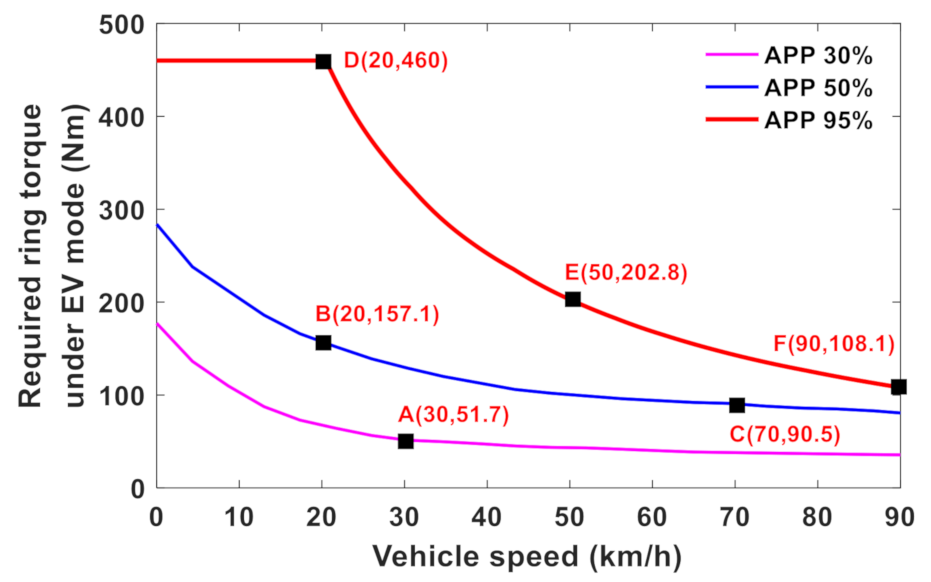
| APP | Acceleration pedal position |
| DTCC-ESC | Dynamic torque coordinated control considering engine starting conditions |
| ECVT | Electric continuous variable transmission |
| ERT | Engine ripple torque |
| EV | Electric vehicle |
| ICA | Initial crankshaft angle |
| IVCT | Intake valve close timing |
| MG1 | Small motor 1 |
| MG2 | Big motor 2 |
| MT | Mode transition |
| PHEV | Plug-in hybrid electric vehicle |
| PID | Proportion integration differentiation |
| PSP | Piston stop position |
| SOC | State of charge |
| TDS | Torsional damper spring |
| TI | Equivalent elastic shaft of the tire and half shaft |
References
- Ouyang, M.; Du, J.; Peng, H.; Wang, H.; Feng, X.; Song, Z. Progress review of US-China joint research on advanced technologies for plug-in electric vehicles. Sci. China Technol. Sci. 2018, 61, 1431–1445. [Google Scholar] [CrossRef]
- Liu, T.; Hu, X.; Hu, W.; Zou, Y. A heuristic planning reinforcement learning-based energy management for power-split plug-in hybrid electric vehicles. IEEE Trans. Ind. Inform. 2019, 15, 6436–6445. [Google Scholar] [CrossRef]
- Jinquan, G.; Hongwen, H.; Jiankun, P.; Nana, Z. A novel MPC-based adaptive energy management strategy in plug-in hybrid electric vehicles. Energy 2019, 175, 378–392. [Google Scholar] [CrossRef]
- Kuang, M.L. An investigation of engine start-stop NVH in a power split powertrain hybrid electric vehicle. SAE Tech. Pap. 2006. [Google Scholar] [CrossRef]
- Hwang, H.Y. Minimizing seat track vibration that is caused by the automatic start/stop of an engine in a power-split hybrid electric vehicle. J. Vib. Acoust. 2013, 135, 061007. [Google Scholar] [CrossRef]
- Chen, J.S.; Hwang, H.Y. Engine automatic start–stop dynamic analysis and vibration reduction for a two-mode hybrid vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1303–1312. [Google Scholar] [CrossRef]
- Huang, K.; Xiang, C.; Ma, Y.; Wang, W.; Langari, R. Mode shift control for a hybrid heavy-duty vehicle with power-split transmission. Energies 2017, 10, 177. [Google Scholar] [CrossRef]
- Hong, S.; Choi, W.; Ahn, S.; Kim, Y.; Kim, H. Mode shift control for a dual-mode power-split-type hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 1217–1231. [Google Scholar] [CrossRef]
- Zuo, Y.H.; Xiang, C.L.; Yan, Q.D.; Wang, Y.Z. Engine start control strategy research for parallel-series hybrid electrical vehicles. In Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 2097–2102. [Google Scholar]
- Gao, A.Y.; Fu, Z.M.; Tao, F.Z. Dynamic coordinated control based on sliding mode controller during mode switching with ICE starting for an HEV. IEEE Access 2020, 8, 60428–60443. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, J.; Zhang, D.; Liu, G.; Yu, H. Experimental and numerical analysis of the seat track vibrations caused by engine starts in a power-split hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 231, 395–404. [Google Scholar] [CrossRef]
- Liu, D.; Yu, H.; Zhang, J. Multibody dynamics analysis for the coupled vibrations of a power split hybrid electric vehicle during the engine start transition. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2016, 230, 527–540. [Google Scholar] [CrossRef]
- Canova, M.; Guezennec, Y.; Yurkovich, S. On the control of engine start/stop dynamics in a hybrid electric vehicle. J. Dyn. Syst. Meas. Control 2009, 131, 061005. [Google Scholar] [CrossRef]
- Davis, R.I.; Lorenz, R.D. Engine torque ripple cancellation with an integrated starter alternator in a hybrid electric vehicle: Implementation and control. IEEE Trans. Ind. Appl. 2003, 39, 1765–1774. [Google Scholar] [CrossRef]
- Zhao, Z.; Dai, X.; Wang, C.; Zhang, T.; Yuan, X. Coordinated control of driving mode switching of compound power-split hybrid electric car. Automot. Eng. 2015, 37, 260–265. [Google Scholar]
- Shen, D.; Gühmann, C.; Zhang, T.; Dong, X. Coordinated control strategy in engine starting process for a novel compound power-split hybrid electric vehicle. In Proceedings of the ASME Internal Combustion Engine Fall Technical Conference, San Diego, CA, USA, 4–7 November 2018. [Google Scholar]
- Lin, Y.; Qin, D.; Hu, M.; Jiang, G. Torque coordination control strategy in engine starting process for a single motor hybrid electric vehicle. Int. J. Electr. Hybrid Veh. 2018, 10, 177–196. [Google Scholar] [CrossRef]
- Tomura, S.; Ito, Y.; Kamichi, K.; Yamanaka, A. Development of vibration reduction motor control for series-parallel hybrid system. SAE Tech. Pap. 2006. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, Z.; Zhang, T.; Li, M. Mode transition coordinated control for a compound power-split hybrid car. Mech. Syst. Signal Process. 2017, 87, 192–205. [Google Scholar] [CrossRef]
- Su, Y.; Hu, M.; Su, L.; Qin, D.; Zhang, T.; Fu, C. Dynamic coordinated control during mode transition process for a compound power-split hybrid electric vehicle. Mech. Syst. Signal Process. 2018, 107, 221–240. [Google Scholar] [CrossRef]
- Li, M.; Zhao, Z.; Jiang, L.; Tang, X. Subsection coordinated control during mode transition for a compound power-split system. SAE Tech. Pap. 2019. [Google Scholar] [CrossRef]
- Zhuang, W.; Kum, D.; Peng, H.; Wang, L.; Li, D. Optimal engine starts of an input-split hybrid electric vehicle. SAE Int. J. Altern. Powertrains 2015, 4, 343–351. [Google Scholar] [CrossRef]
- Zhao, Z.; Jiang, L.; Wang, C.; Li, M. Engine start-up optimal control for a compound power-split hybrid powertrain. Mech. Syst. Signal Process. 2019, 120, 365–377. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, Z.; Lu, K. Transition rules among different vehicle driving modes for power-split powertrain hybrid electric vehicle. J. TongJi Univ. (Nat. Sci.) 2009, 37, 948–954. [Google Scholar]
- Zeng, X.; Yang, N.; Wang, J.; Song, D.; Zhang, N.; Shang, M.; Liu, J. Predictive-model-based dynamic coordination control strategy for power-split hybrid electric bus. Mech. Syst. Signal Process. 2015, 60, 785–798. [Google Scholar] [CrossRef]
- Su, Y.; Hu, M.; Su, L.; Qin, D.; Zhang, Y. Dynamic coordinated control during mode transition process for a plug-in hybrid electric vehicle. IEEE Access 2019, 7, 53891–53908. [Google Scholar] [CrossRef]
- Zeng, X.; Wang, Y.; Song, D.; Zhu, L.; Tian, G.; Li, Z. Coordinated control algorithm of a dual motor for an electric variable transmission hybrid system. IEEE Access 2018, 6, 53669–53682. [Google Scholar] [CrossRef]
- Syed, F.U.; Kuang, M.L.; Ying, H. Active damping wheel-torque control system to reduce driveline oscillations in a power-split hybrid electric vehicle. IEEE Trans. Veh. Technol. 2009, 58, 4769–4785. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, D.; Liu, T.; Khajepour, A.; Yu, H.; Wang, H. Research on the energy control of a dual-motor hybrid vehicle during engine start-stop process. Energy 2019, 166, 1181–1193. [Google Scholar] [CrossRef]
- Zhu, F.; Chen, L.; Yin, C.; Shu, J. Dynamic modelling and systematic control during the mode transition for a multi-mode hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1007–1023. [Google Scholar] [CrossRef]
- Zhou, L. Study the Internal Combustion Engine; Machinery Industry Press: China, 2011. [Google Scholar]
- Guzela, L.; Wendell, C.H. Introduction to Modeling and Control of Internal Combustion Engine; Springer: Berlin, Germany, 2016. [Google Scholar]
- Yuan, D.; Xu, Y.; Li, X. Variable Frequency System of Permanent Magnet Synchronous Motor and Control; Mechanical Industry Press: China, 2015. [Google Scholar]
- Su, Y.; Hu, M.; Su, L.; Qin, D.; Liu, Y. Study on dynamic characteristics of electromechanical coupling in mode switching process of multi-power transmission system considering internal and external excitation. In Proceedings of the JSME International Conference on Motion and Power Transmissions, Kyoto, Japan, 1–3 March 2017; pp. 545–550. [Google Scholar]
- Benford, H.L.; Leising, M.B. The lever analogy: A new tool in transmission analysis. In SAE International Congress and Exposition; SAE Technical Paper 810102; SAE International: Detroit, MI, USA, 1981. [Google Scholar]
- Yu, H.S.; Zhang, J.W.; Zhang, T. Control strategy design and experimental research on a four-shaft electronic continuously variable transmission hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1594–1612. [Google Scholar] [CrossRef]
- Zhang, Y.; Mi, C. Automotive Power Transmission Systems; John Wiley & Sons: Hoboken, NJ, USA, 2018; pp. 431–436. [Google Scholar] [CrossRef]
- Wei, X.; Pisu, P.; Rizzoni, G.; Yurkovich, S. Dynamic modeling of a hybrid electric drivetrain for fuel economy, performance and driveability evaluations. In Proceedings of the ASME 2003 International Mechanical Engineering Congress and Exposition, Washington, DC, USA, 15–21 November 2003; pp. 443–450. [Google Scholar]
- Robinette, D.; Orlando, J. Control strategy and energy recovery potential for P2 parallel hybrid step gear automatic transmissions. SAE Tech. Pap 2019. [Google Scholar] [CrossRef]
- Mirjalili, S. Genetic algorithm. In Evolutionary Algorithms and Neural Networks; Springer: Cham, Switzerland, 2019; pp. 43–55. [Google Scholar]
- Yu, S.; Zhang, Y.; Dong, G.; Li, L. Fuel injection optimization during engine quick start by means of cycle-by-cycle control strategy for HEV application. SAE Tech. Pap. 2009. [Google Scholar] [CrossRef]
- Su, Y.; Su, L.; Hu, M.; Qin, D.; Fu, C.; Yu, H. Modeling and dynamic response analysis of a compound power-split hybrid electric vehicle during the engine starting process. IEEE Access 2020, 8, 186585–186598. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Engine maximum torque/speed (Nm/rpm) | 145/3600 |
| MG1/MG2 maximum torque (Nm) | 96/246 |
| Planetary parameter of front row | −3.179 |
| Planetary parameter of rear row | 2.342 |
| Final drive ratio | 4.044 |
| Carrier inertia (kg⋅m2) | 0.0039 |
| Ring inertia (kg⋅m2) | 0.0017 |
| Inertia () of MG1 and (kg⋅m2) | 0.041 |
| Inertia () of MG2 and (kg⋅m2) | 0.0723 |
| Engine inertia (kg⋅m2) | 0.18 |
| Vehicle equivalent mass (kg) | 1538 |
| Wheel radius (m) | 0.31 |
| Vehicle frontal area (m2) | 2.19 |
| Air resistance coefficient | 0.307 |
| Tire rolling resistance coefficient | 0.0137 |
| Rated capacity of battery (Ah) | 37 |
| Rated voltage of battery (V) | 308 |
| Equivalent TI torsional stiffness (Nm⋅rad−1) | 2864 |
| Equivalent TI torsional damping (Nm⋅s⋅rad−1) | 15 |
| Engine Starting Other Conditions | Engine Coolant Temperature (°C) | Battery Temperature (°C) | SOC |
|---|---|---|---|
| Case A | 25 | 40 | 0.2 |
| Case B | 25 | 40 | 0.15 |
| Case C | 25 | 40 | 0.2 |
| Case D | 25 | 40 | 0.8 |
| Case E | 25 | 40 | 0.8 |
| Case F | 25 | 40 | 0.8 |
| Control Methods | Method Description |
|---|---|
| ADCC | Only feedback damping torque in Equation (22) obtained by a PID controller |
| ADCC-EAC | Engine active control + feedback damping torque in Equation (22) obtained by a PID controller |
| DTCC-ESC | Engine segment active control + feedforward control considering engine starting conditions and feedback control considering engine optimal target speed + ADFC-SR |
| Control Methods | Ja-max (m/s3) | Improvement of Ja-max (%) |
|---|---|---|
| ADCC | 114.5 | — |
| ADCC-EAC | 34.58 | 69.8 |
| DTCC-ESC | 9.94 | 91.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, Y.; Hu, M.; Huang, J.; Qin, D.; Fu, C.; Zhang, Y. Dynamic Torque Coordinated Control Considering Engine Starting Conditions for a Power-Split Plug-In Hybrid Electric Vehicle. Appl. Sci. 2021, 11, 2085. https://doi.org/10.3390/app11052085
Su Y, Hu M, Huang J, Qin D, Fu C, Zhang Y. Dynamic Torque Coordinated Control Considering Engine Starting Conditions for a Power-Split Plug-In Hybrid Electric Vehicle. Applied Sciences. 2021; 11(5):2085. https://doi.org/10.3390/app11052085
Chicago/Turabian StyleSu, Yanzhao, Minghui Hu, Jin Huang, Datong Qin, Chunyun Fu, and Yi Zhang. 2021. "Dynamic Torque Coordinated Control Considering Engine Starting Conditions for a Power-Split Plug-In Hybrid Electric Vehicle" Applied Sciences 11, no. 5: 2085. https://doi.org/10.3390/app11052085
APA StyleSu, Y., Hu, M., Huang, J., Qin, D., Fu, C., & Zhang, Y. (2021). Dynamic Torque Coordinated Control Considering Engine Starting Conditions for a Power-Split Plug-In Hybrid Electric Vehicle. Applied Sciences, 11(5), 2085. https://doi.org/10.3390/app11052085