Droop Method Development for Microgrids Control Considering Higher Order Sliding Mode Control Approach and Feeder Impedance Variation



Abstract
1. Introduction
- This paper is aimed to improve the droop control method performance based on the sliding mode control (SMC) approach. This is because the droop control method is easy to implement, however, in order to minimize the reactive power sharing errors appeared in conventional ways, the authors contrive to apply a modern control approach to it.
- The SMC approach to obtain the power sharing in parallel inverters has been done in many literatures, but in this study, in order to possess more freedom of degree in control coefficients and reduce the conventional SMC errors, a novel higher order SMC is proposed.
- Since the conventional droop control integrated with SMC could not be able to implement in complex MG considering multiple DGs, the higher order SMC approach is capable to overcome these problems especially feeder impedance variations.
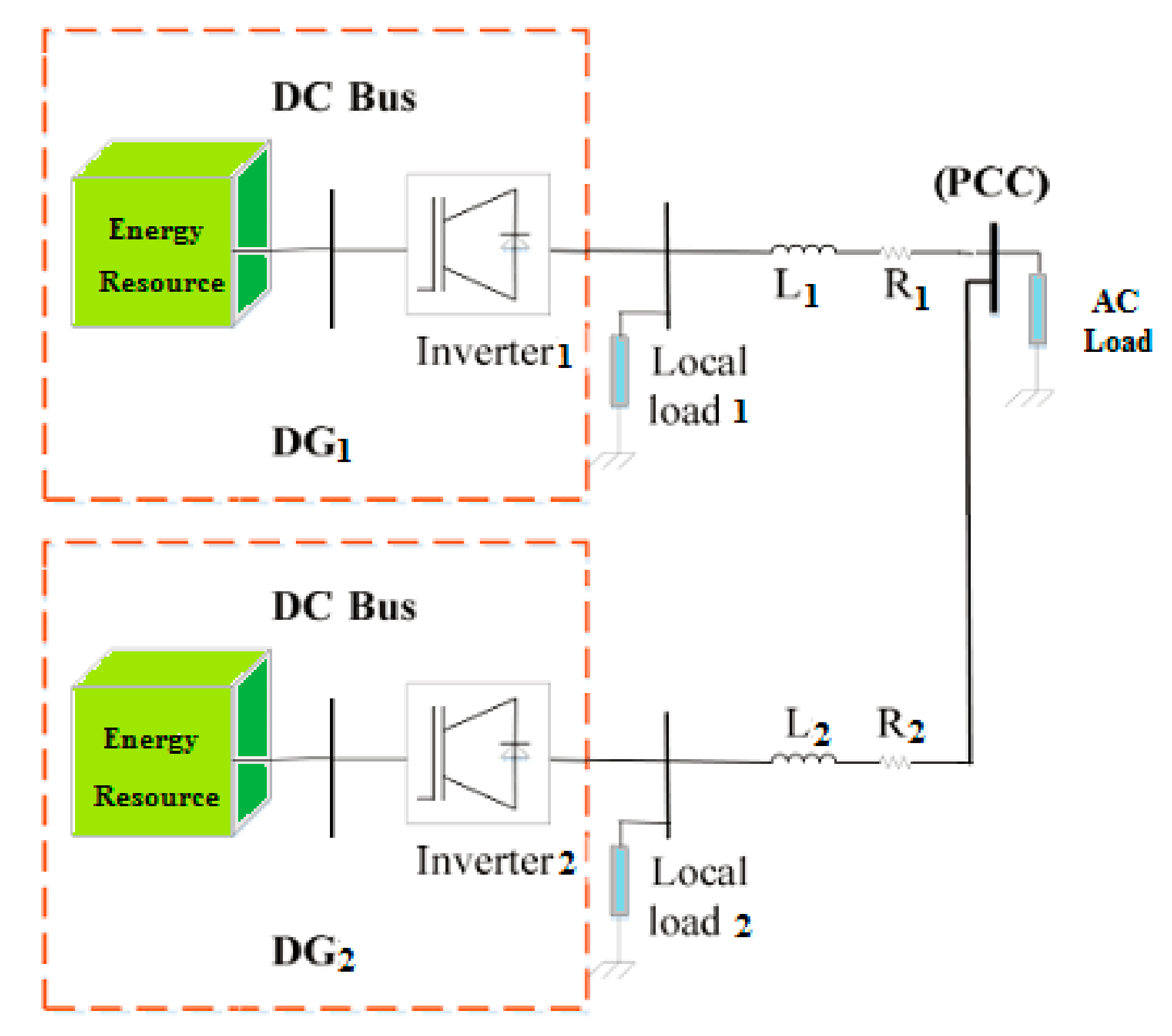
2. Formulations of Operation Principle
3. Control Approach
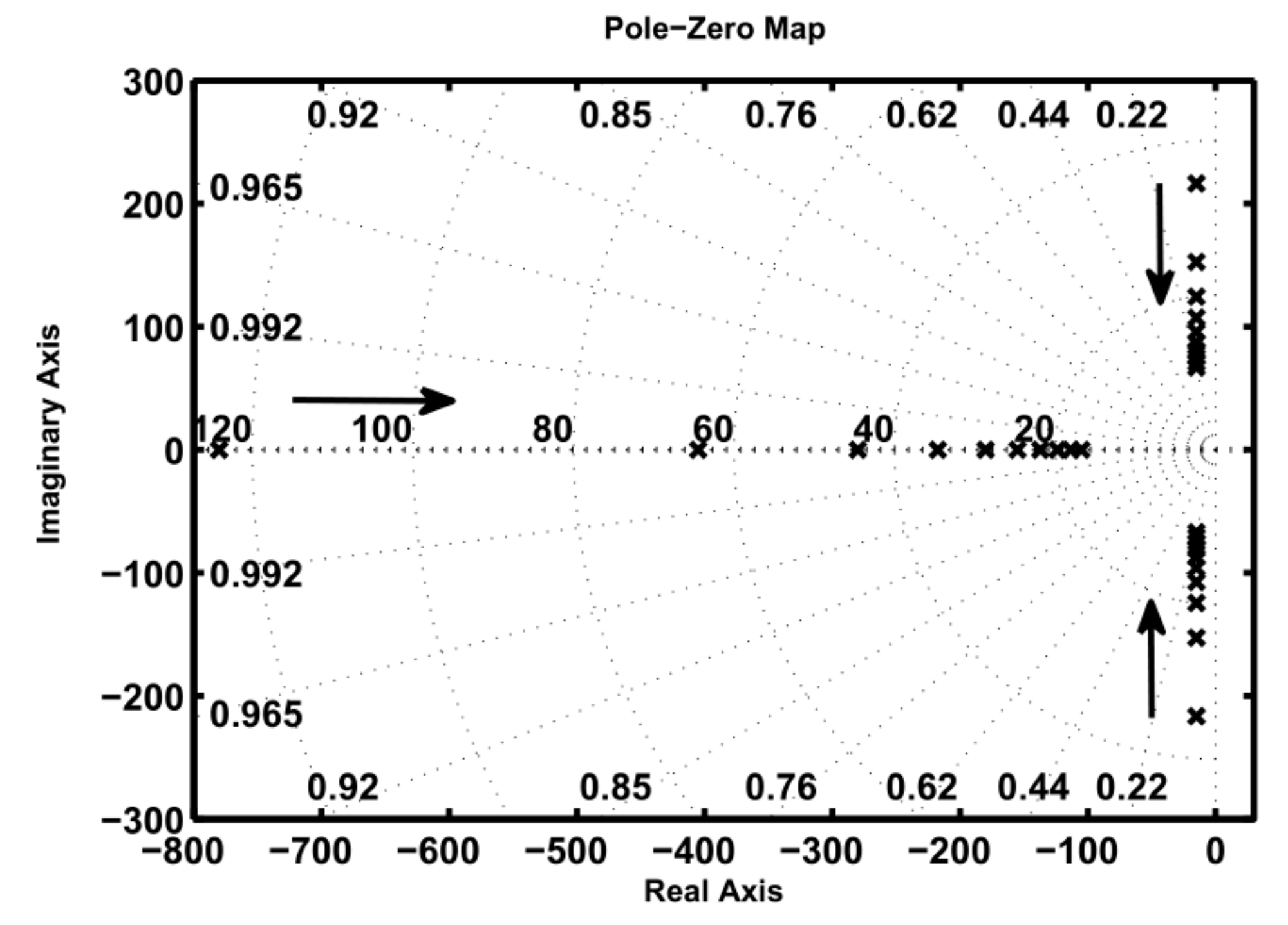
4. Stability Evaluation
4.1. Grid-Connected Mode
4.2. Islanding Mode
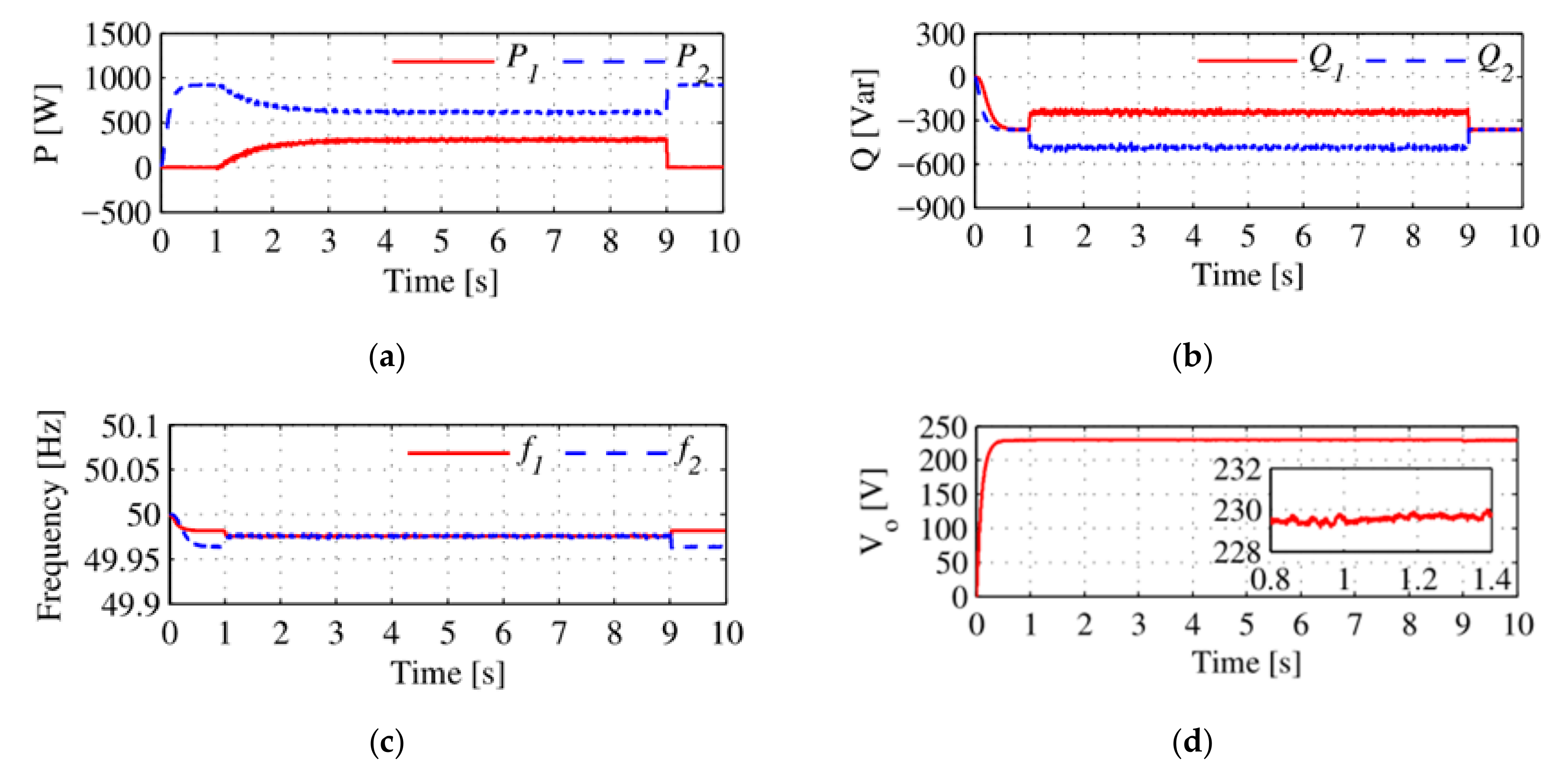
5. Simulations Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- García, V.Y.E.; Dufo, L.R.; Bernal, A.J.L. Energy Management in Microgrids with Renewable Energy Sources: A Literature Review. Appl. Sci. 2019, 19, 3854. [Google Scholar] [CrossRef]
- Bazmohammadi, N.; Anvari-Moghaddam, A.; Tahsiri, A.; Madary, A.; Vasquez, J.C.; Guerrero, J.M. Stochastic Predictive Energy Management of Multi-Microgrid Systems. Appl. Sci. 2020, 10, 4833. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Soltani, H.; Blaabjerg, F.; Calado, M.; Catalão, J.P. Virtual Inertia and Mechanical Power-Based Control Strategy to Provide Stable Grid Operation under High Renewables Penetration. Appl. Sci. 2019, 9, 1043. [Google Scholar] [CrossRef]
- Hou, X.; Sun, Y.; Yuan, W.; Han, H.; Zhong, C.; Guerrero, J.M. Conventional P-ω/QV Droop Control in Highly Resistive Line of Low-Voltage Converter-Based AC Microgrid. Energies 2016, 9, 943. [Google Scholar] [CrossRef]
- Tayab, U.B.; Bin, R.M.A.; Hwai, L.J.; Kashif, M. A Review of Droop Control Techniques for Microgrid. Renew. Sustain. Energy Rev. 2017, 76, 717–727. [Google Scholar] [CrossRef]
- Sun, Y.; Hou, X.; Yang, J.; Han, H.; Su, M.; Guerrero, J.M. New Perspectives on Droop Control in AC Microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5741–5745. [Google Scholar] [CrossRef]
- Vu, T.V.; Perkins, D.; Diaz, F.; Gonsoulin, D.; Edrington, C.S.; El-Mezyani, T. Robust Adaptive Droop Control for DC Microgrids. Electr. Power Syst. Res. 2017, 146, 95–106. [Google Scholar] [CrossRef]
- Peyghami, S.; Davari, P.; Mokhtari, H.; Blaabjerg, F. Decentralized Droop Control in DC Microgrids Based on a Frequency Injection Approach. IEEE Trans. Smart Grid 2019, 10, 6782–6791. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Bi, D.-Q.; Wen, Y.; Dai, Y.; Yin, X.; Shen, J. Droop Control Strategy Incorporating Coupling Compensation and Virtual Impedance for Microgrid Application. IEEE Trans. Energy Convers. 2019, 11, 1. [Google Scholar] [CrossRef]
- Yuan, W.; Wang, Y.; Liu, D.; Deng, F.; Chen, Z. Efficiency-Prioritized Droop Control Strategy of AC Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 1. [Google Scholar] [CrossRef]
- Wang, R.; Sun, Q.; Gui; Y; Ma, D. Exponential-Function-Based Droop Control for Islanded Microgrids. J. Mod. Power Syst. Clean Energy 2019, 7, 899–912. [Google Scholar] [CrossRef]
- Wang, S.; Lu, L.; Han, X.; Ouyang, M.; Feng, X. Virtual-Battery Based Droop Control and Energy Storage System Size Optimization of a DC Microgrid for Electric Vehicle Fast Charging Station. Appl. Energy 2020, 259, 114146. [Google Scholar] [CrossRef]
- Matayoshi, H.; Kinjo, M.; Rangarajan, S.S.; Ramanathan, G.G.; Hemeida, A.M.; Senjyu, T. Islanding Operation Scheme for DC Microgrid Utilizing Pseudo Droop Control of Photovoltaic System. Energy Sustain. Dev. 2020, 55, 95–104. [Google Scholar] [CrossRef]
- Bijaieh, M.M.; Weaver, W.W.; Robinett, R.D., III. Energy Storage Requirements for Inverter-Based Microgrids under Droop Control in dq Coordinates. IEEE Trans. Energy Convers. 2019, 11, 611–620. [Google Scholar]
- Shi, Z.; Li, J.; Nurdin, H.I.; Fletcher, J. Comparison of Virtual Oscillator and Droop Controlled Islanded Three-Phase Microgrids. IEEE Trans. Energy Convers. 2019, 34, 1769–1780. [Google Scholar] [CrossRef]
- Espina, E.; Cardenas, R.; Espinoza-B., M.; Burgos-Mellado, C.; Sáez, D. Cooperative Regulation of Imbalances in Three-Phase Four-Wire Microgrids Using Single-Phase Droop Control and Secondary Control Algorithms. IEEE Trans. Power Electron. 2020, 35, 1978–1992. [Google Scholar] [CrossRef]
- Du, W.; Chen, Z.; Schneider, K.P.; Lasseter, R.H.; Nandanoori, S.P.; Tuffner, F.K.; Kundu, S. A Comparative Study of Two Widely Used Grid-Forming Droop Controls on Microgrid Small-Signal Stability. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 963–975. [Google Scholar] [CrossRef]
- Wang X, X.; Zhang, J.; Zheng, M.; Ma, L. A Distributed Reactive Power Sharing Approach in Microgrid with Improved Droop Control. CSEE J. Power Energy Syst. 2020, 1–9. [Google Scholar] [CrossRef]
- Hosseinimoghadam, S.M.S.; Roghanian, H.; Dashtdar, M.; Razavi, S.M. Power-Sharing Control in an Islanded Microgrid using Virtual Impedance. In Proceedings of the 8th International Conference on Smart Grid (icSmartGrid), Paris, France, 17–19 June 2020; pp. 73–77. [Google Scholar] [CrossRef]
- Mahmoudian, M.; Bian, M.A.; Gitizadeh, M. High Accuracy Power Sharing in Parallel Inverters in an Islanded Microgrid Using Modified Sliding Mode Control Approach. Sci. Iran. 2019, 1. [Google Scholar] [CrossRef]
- Maanavi, M.; Najafi, A.; Godina, R.; Mahmoudian, M.; Rodrigues, E.M.G. Energy Management of Virtual Power Plant Considering Distributed Generation Sizing and Pricing. Appl. Sci. 2019, 9, 2817. [Google Scholar] [CrossRef]
- De Machado, S.J.M.M.; Silva, S.A.O.D.; Monteiro, J.R.B.D.A.; de Oliveira, A.A. Network Modeling Influence on Small-Signal Reduced-Order Models of Inverter-Based AC Microgrids Considering Virtual Impedance. IEEE Trans. Smart Grid 2021, 12, 79–92. [Google Scholar] [CrossRef]
- Pham, D.M.; Lee, H.H. Effective Coordinated Virtual Impedance Control for Accurate Power Sharing in Islanded Microgrid. IEEE Trans. Ind. Electron. 2020, 68, 2279–2288. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| ) | 400 (V, rms) |
| ) | 50 (Hz) |
| ) | 15 (kHz) |
| ) for both DGs | 500 (V) |
| ) for DG1 | ) |
| ) for DG2 | ) |
| ) for DG1 | ) |
| ) for DG2 | ) |
| ) for DG1 | ) |
| ) for DG2 | ) |
| ) for DG1 | 4 (kVA) |
| ) for DG2 | 8 (kVA) |
| ) for DG1 | ) |
| ) for DG1 | ) |
| Parameter | Value |
|---|---|
| Active droop coefficients (m) for DG1 | 4.26 × 10−4 (V/W) |
| Active droop coefficients (m) for DG2 | 7.63 × 10−4 (V/W) |
| Reactive droop coefficients (n) for DG1 | 3.04 × 10−4 (rad/s/Var) |
| Reactive droop coefficients (n) for DG2 | 6.08 × 10−4 (rad/s/Var) |
| Cut-off frequency ) for both DGs | 10 (rad/s) |
| 1000 | |
| 800 |
| Method | Scenario 1 | Scenario 2 | Scenario 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Rise Time | Overshoot | Settling Time | Rise Time | Overshoot | Settling Time | Rise Time | Overshoot | Settling Time | |
| Conventional SMC | 0.0051 s | 3.17% | 0.075 s | 0.0128 s | 3.12% | 0.065 s | 0.0086 s | 3.04% | 0.059 s |
| Proposed MSMC | 0.0035 s | 1.24% | 0.042 s | 0.0096 s | 1.34% | 0.036 s | 0.0075 s | 1.16% | 0.027 s |
| Method | Scenario 1 | Scenario 2 | Scenario 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Rise Time | Overshoot | Settling Time | Rise Time | Overshoot | Settling Time | Rise Time | Overshoot | Settling Time | |
| Conventional SMS | 0.0075 s | 3.16% | 0.078 s | 0.0123 s | 3.23% | 0.068 s | 0.008 s | 3.27% | 0.063 s |
| Proposed MSMC | 0.0051 s | 1.33% | 0.053 s | 0.0076 s | 1.22% | 0.031 s | 0.007 s | 1.05% | 0.020 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleh-Ahmadi, A.; Moattari, M.; Gahedi, A.; Pouresmaeil, E. Droop Method Development for Microgrids Control Considering Higher Order Sliding Mode Control Approach and Feeder Impedance Variation. Appl. Sci. 2021, 11, 967. https://doi.org/10.3390/app11030967
Saleh-Ahmadi A, Moattari M, Gahedi A, Pouresmaeil E. Droop Method Development for Microgrids Control Considering Higher Order Sliding Mode Control Approach and Feeder Impedance Variation. Applied Sciences. 2021; 11(3):967. https://doi.org/10.3390/app11030967
Chicago/Turabian StyleSaleh-Ahmadi, Abdonaser, Mazda Moattari, Amir Gahedi, and Edris Pouresmaeil. 2021. "Droop Method Development for Microgrids Control Considering Higher Order Sliding Mode Control Approach and Feeder Impedance Variation" Applied Sciences 11, no. 3: 967. https://doi.org/10.3390/app11030967
APA StyleSaleh-Ahmadi, A., Moattari, M., Gahedi, A., & Pouresmaeil, E. (2021). Droop Method Development for Microgrids Control Considering Higher Order Sliding Mode Control Approach and Feeder Impedance Variation. Applied Sciences, 11(3), 967. https://doi.org/10.3390/app11030967