
Fully Distributed Control for a Class of Uncertain Multi-Agent Systems with a Directed Topology and Unknown State-Dependent Control Coefficients




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- To address the time-varying control coefficients of a MAS, a two-order filter is firstly designed for each agent to produce estimates of the signals from the leader, so that an asymmetric Laplace matrix for a directed graph will not be used to design the controller for each agent of the MAS, by which the difficulty of control design is solved.
- (2)
- To address the completely unknown system nonlinearities in MAS, barrier functions are used to propose a fully distributed controller by combining novel filters; barrier functions are well-suited to dealing with the effects of unknown system nonlinearities, such that global results are achieved, for the first time, in a MAS with completely unknown system nonlinearities in this paper.
- (3)
- To guarantee the prescribed tracking performance by the proposed controller, such that the consensus of the controlled MAS is rigorously proved and all the closed signals are globally bounded.
2. Problem Statement and Preliminaries
3. Design of Distributed Controller and Filters
3.1. Filters Design
3.2. Design of the Distributed Controller
4. Stability Analysis
- (1)
- All the signals in the closed-loop system are globally bounded
- (2)
- Prespecified tracking performance can be guaranteed, namely,, for.
- (3)
- The output of each agent ultimately satisfies.
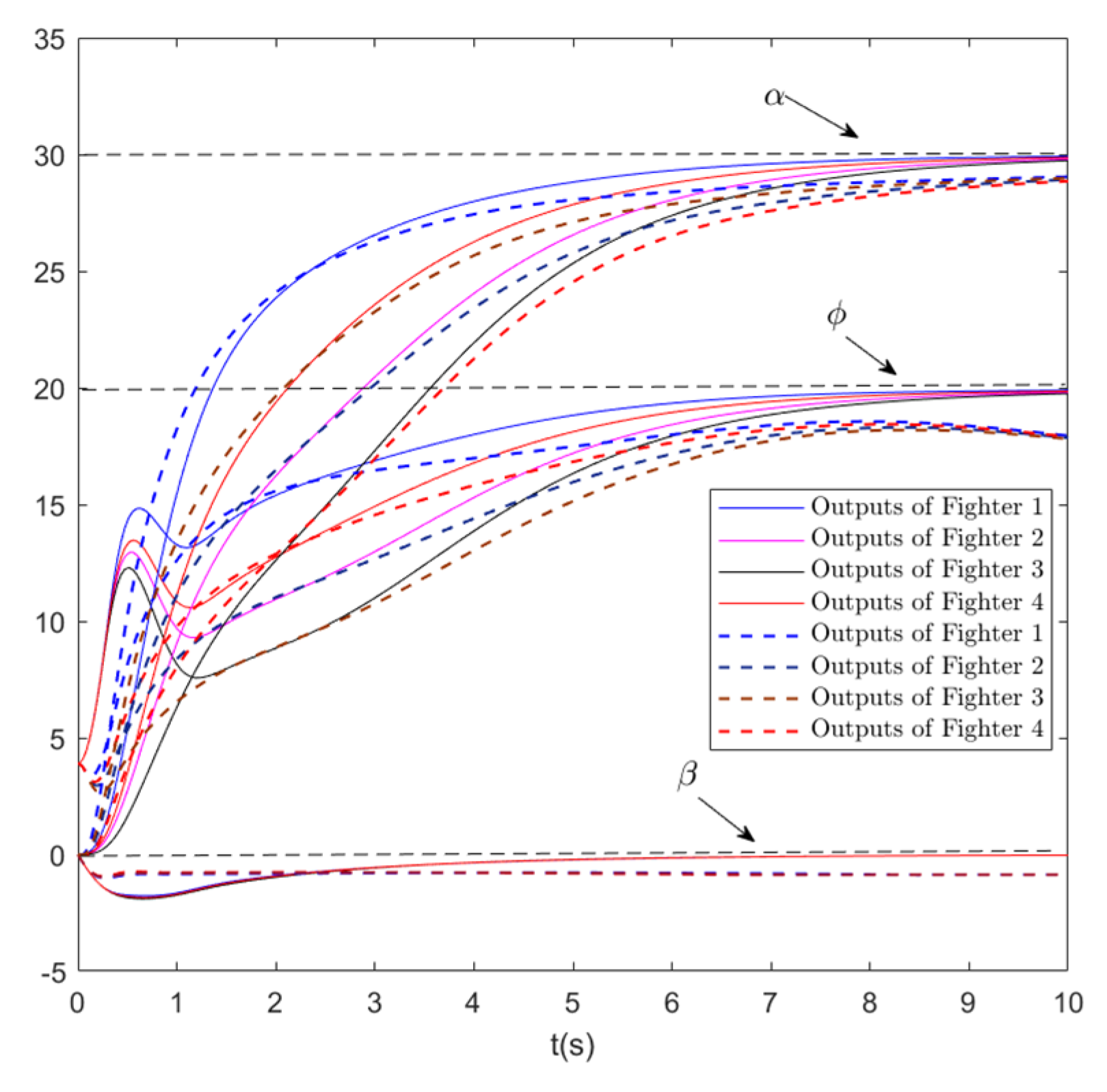
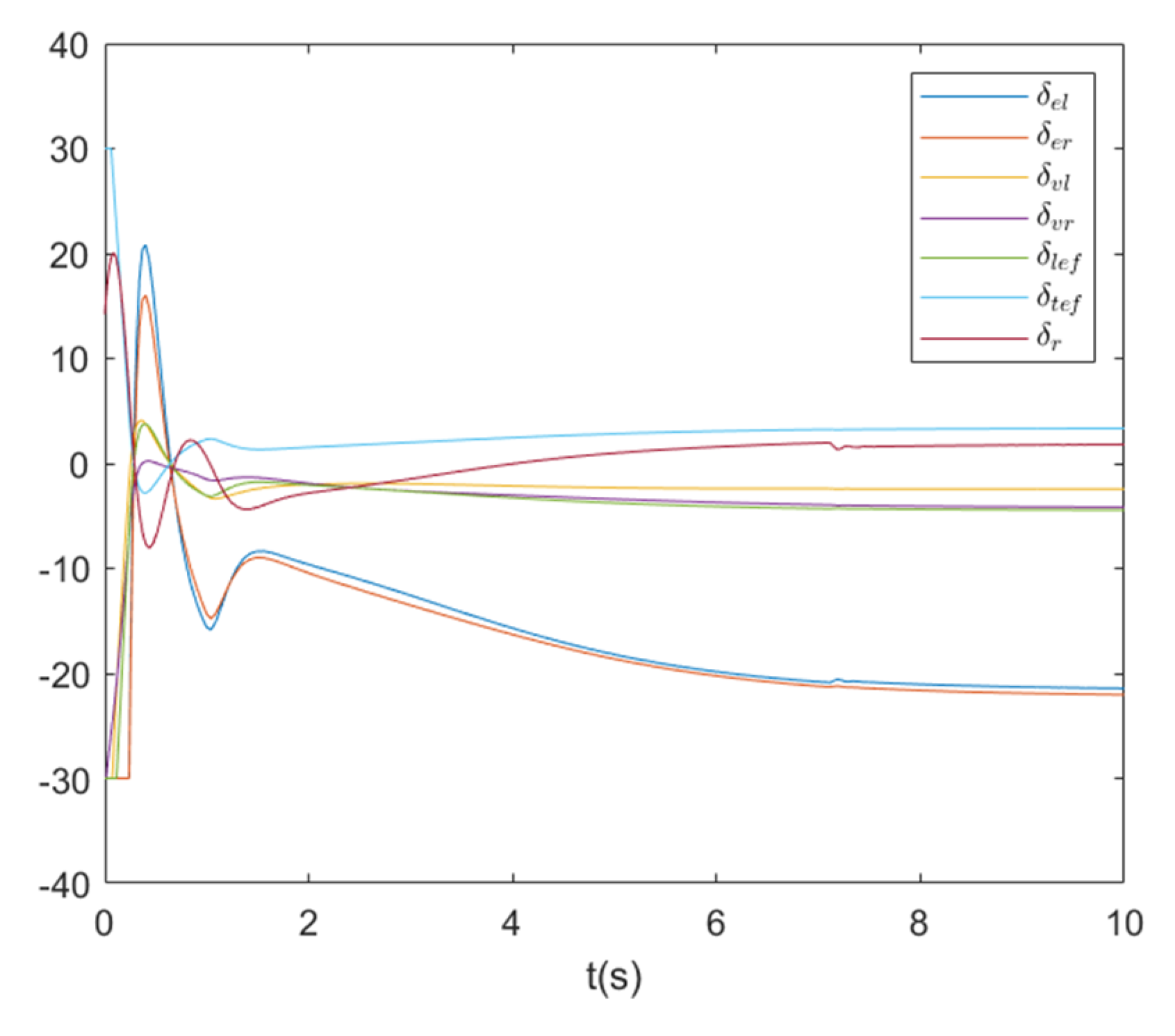
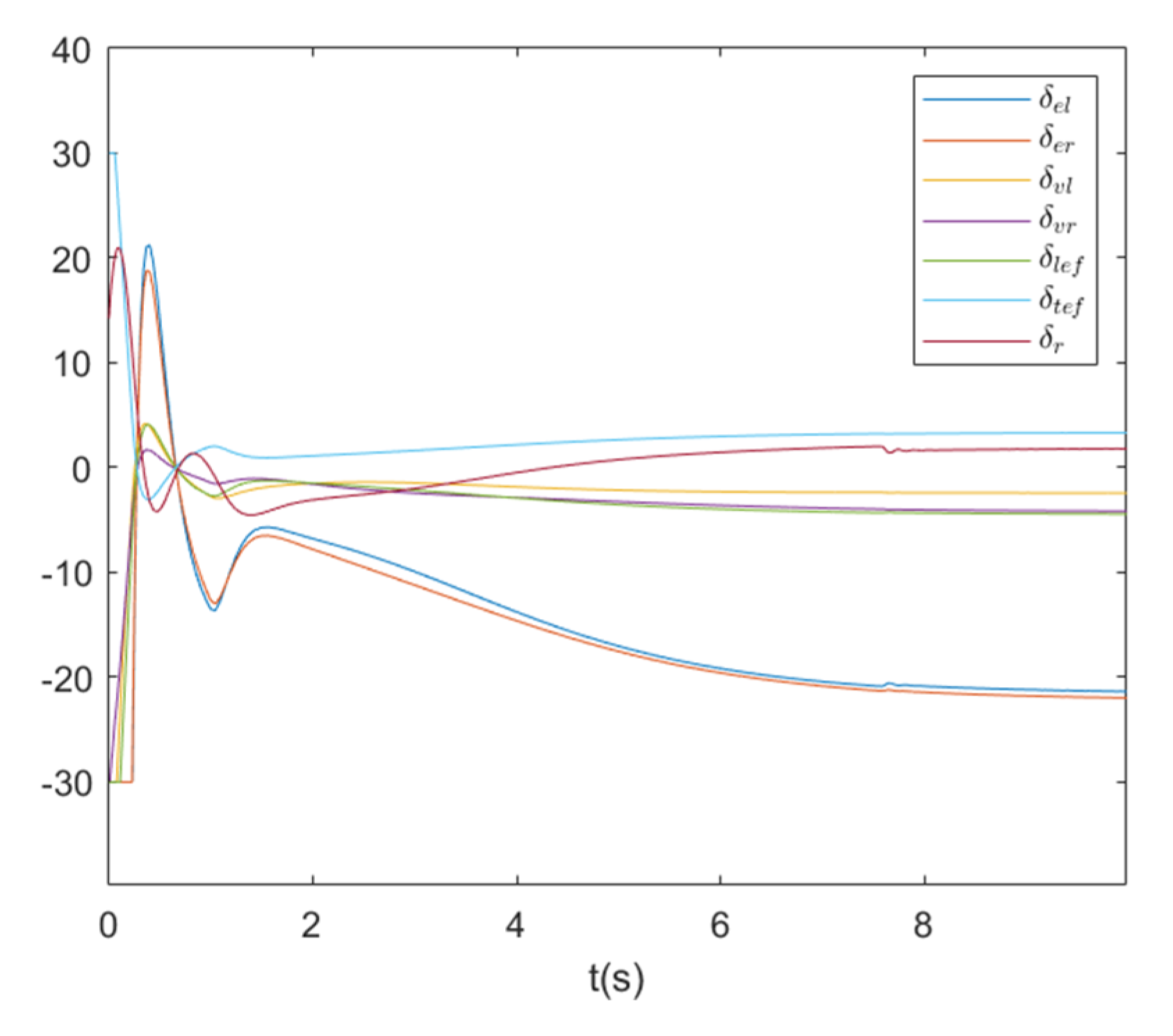
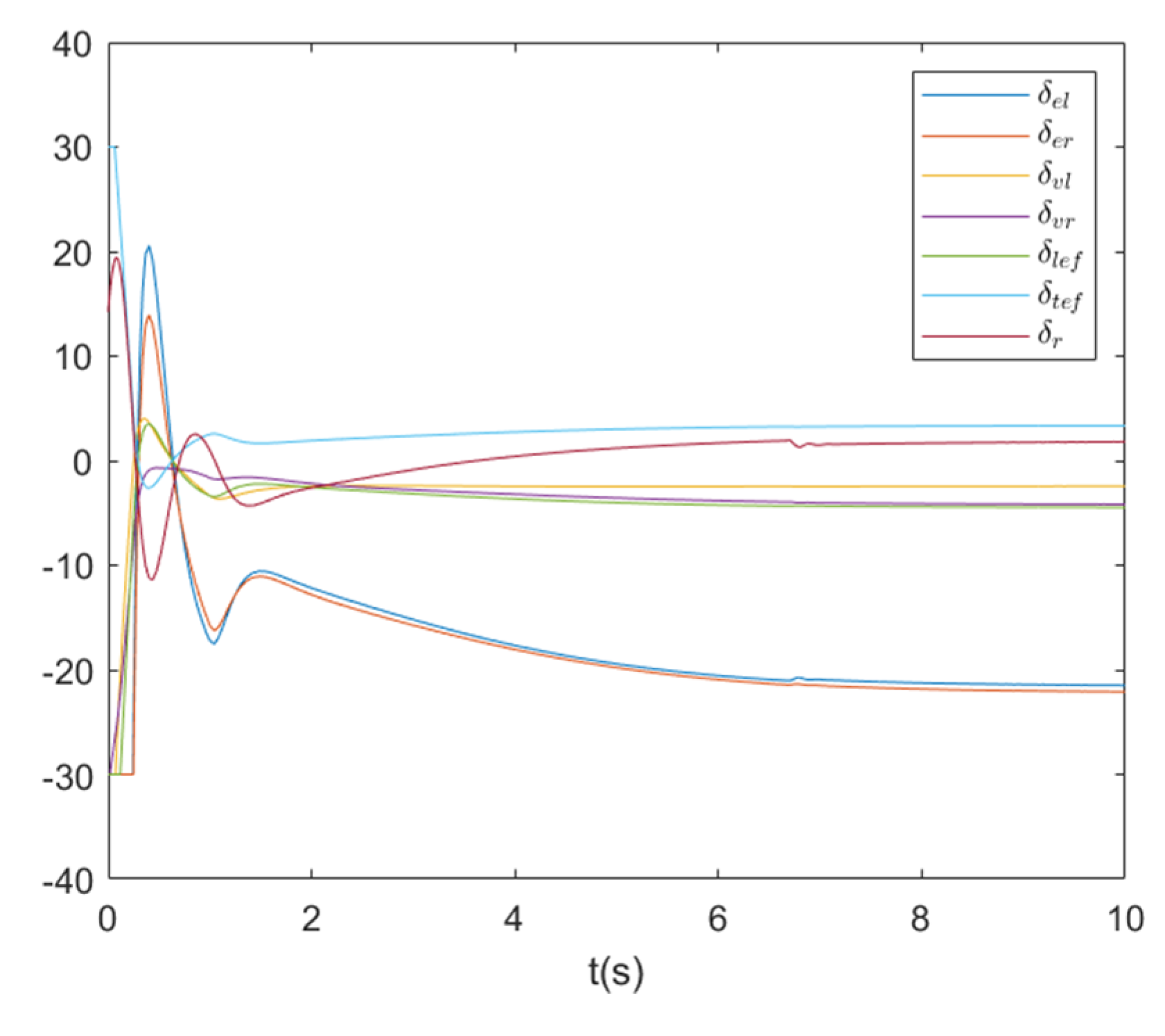
5. Simulation Study
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Z.C.; Dong, X.M.; Xie, W.J.; Chen, Y.; Li, H.B. Adaptive fuzzy control for pure-feedback nonlinear systems with nonaffine functions being semibounded and indifferentiable. IEEE Trans. Fuzzy Syst. 2018, 26, 395–408. [Google Scholar] [CrossRef]
- Liu, Z.C.; Dong, X.M.; Xue, J.P.; Li, H.B.; Chen, Y. Adaptive neural control for a class of pure-feedback nonlinear systems via dynamic surface technique. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1969–1975. [Google Scholar] [CrossRef]
- Liu, Z.C.; Dong, X.M.; Xue, J.P.; Chen, Y. Adaptive neural control for a class of time-delay systems in the presence of backlash or dead-zone non-linearity. IET Control Theory Appl. 2014, 8, 1009–1022. [Google Scholar] [CrossRef]
- Cai, J.P.; Wen, C.Y.; Su, H.Y.; Liu, Z.T.; Xing, L.T. Adaptive backstepping control for a class of nonlinear systems with non-triangular structural uncertainties. IEEE Trans. Autom. Control 2017, 62, 5220–5226. [Google Scholar] [CrossRef]
- Li, Y.M.; Liu, Y.J.; Tong, S.C. Observer-based neuro-adaptive optimized control for a class of strict-feedback nonlinear systems with state constraints. IEEE Trans. Neural Netw. Learn. Syst. 2021, 99, 1–15. [Google Scholar] [CrossRef]
- Chen, L.S. Asymmetric prescribed performance-barrier Lyapunov function for the adaptive dynamic surface control of unknown pure-feedback nonlinear switched systems with output constraints. Int. J. Adapt. Control Signal Process. 2018, 32, 1417–1439. [Google Scholar] [CrossRef]
- Huang, J.; Wang, W.; Wen, C.; Zhou, J. Adaptive control of a class of strict-feedback time-varying nonlinear systems with unknown control coefficients. Automatica 2018, 93, 98–105. [Google Scholar] [CrossRef]
- Li, F.Z.; Liu, Y.G. Control design with prescribed performance for nonlinear systems with unknown control directions and nonparametric uncertainties. IEEE Trans. Autom. Control 2018, 62, 3573–3580. [Google Scholar] [CrossRef]
- Huang, X.C.; Song, Y.D.; Lai, J.F. Neuro-adaptive control with given performance specifications for strict feedback systems under full-state constraints. IEEE Trans. Neural Netw. Learning Syst. 2018, 30, 25–34. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Ren, W.; Liu, X.; Fu, M. Consensus of multi-agent systems with general linear and lipschitz nonlinear dynamics using distributed adaptive protocols. IEEE Trans. Autom. Control 2013, 58, 1786–1791. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wen, C.; Huang, J. Distributed adaptive asymptotically consensus tracking control of nonlinear multi-agent systems with unknown parameters and uncertain disturbances. Automatica 2017, 77, 133–142. [Google Scholar] [CrossRef]
- Wang, J. Distributed coordinated tracking control for a class of uncertain multiagent systems. IEEE Trans. Autom. Control 2017, 62, 3423–3429. [Google Scholar] [CrossRef]
- Wang, W.; Wen, C.; Huang, J.; Zhou, J. Adaptive consensus of uncertain nonlinear systems with event triggered communication and intermittent actuator faults. Automatica 2020, 111, 108667. [Google Scholar] [CrossRef]
- Huang, J.; Song, Y.; Wang, W.; Wen, C.; Li, G. Fully distributed adaptive consensus control of a class of high-order nonlinear systems with a directed topology and unknown control directions. IEEE Trans. Cybern. 2018, 48, 2349–2356. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wen, C.; Guo, L. Adaptive consensus control for nonlinear multi-agent systems with unknown control directions and time-varying actuator faults. IEEE Trans. Autom. Control 2021, 66, 4222–4229. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Decentralized robust synchronization of unknown high order nonlinear multi-agent systems with prescribed transient and steady state performance. IEEE Trans. Autom. Control 2017, 62, 123–134. [Google Scholar] [CrossRef]
- Huang, J.; Wang, W.; Wen, C. Distributed adaptive leader–follower and leaderless consensus control of a class of strict-feedback nonlinear systems: A unified approach. Automatica 2020, 118, 109021. [Google Scholar] [CrossRef]
- Hua, C.; You, X.; Guan, X. Leader-following consensus for a class of high-order nonlinear multi-agent systems. Automatica 2016, 73, 138–144. [Google Scholar] [CrossRef]
- Chen, C.; Wen, C.; Liu, Z.; Xie, K.; Zhang, Y.; Chen, C.L.P. Adaptive consensus of nonlinear multi-agent systems with non-identical partially unknown control directions and bounded modelling errors. IEEE Trans. Autom. Control 2017, 62, 4654–4659. [Google Scholar] [CrossRef]
- Huang, J.; Song, Y.D.; Wang, W.; Wen, C.; Li, G.Q. Smooth control design for adaptive leader-following consensus control of a class of high-order nonlinear systems with time-varying reference. Automatica 2017, 83, 361–367. [Google Scholar] [CrossRef]
- Chen, J.; Li, J.; Yuan, X. Global fuzzy adaptive consensus control of unknown nonlinear multi-agent systems. IEEE Trans. Fuzzy Syst. 2020, 28, 510–522. [Google Scholar] [CrossRef]
- Yang, H.J.; Ye, D. Adaptive fuzzy nonsingular fixed-time control for nonstrict-feedback constrained nonlinear multi-agent systems with input saturation. IEEE Trans. Fuzzy Syst. 2021, 29, 3142–3153. [Google Scholar] [CrossRef]
- Deng, C.; Yang, G. Distributed adaptive fuzzy control for nonlinear multiagent systems under directed graphs. IEEE Trans. Fuzzy Syst. 2018, 26, 1356–1366. [Google Scholar]
- Dong, G.; Li, H.; Ma, H. Finite-time consensus tracking neural network FTC of multi-agent systems. IEEE Trans. Neural Net. Learning Syst. 2021, 32, 653–662. [Google Scholar] [CrossRef] [PubMed]
- Bechlioulis, C.P.; Rovithakis, G.A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 2014, 50, 1217–1226. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Robust adaptive fault-tolerant control for a class of unknown nonlinear systems. IEEE Trans. Ind. Electron. 2016, 42, 585–594. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S.C. Barrier Lyapunov Functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints. Automatica 2016, 64, 70–75. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Adaptive prescribed performance control of nonlinear output-feedback systems with unknown control direction. Int. J. Robust Nonlinear Control 2018, 28, 4696–4712. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions. IEEE Trans. Autom. Control 2017, 62, 6529–6535. [Google Scholar] [CrossRef]
- Sun, R.; Na, J.; Zhu, B. Robust approximation-free prescribed performance control for nonlinear systems and its application. Int. J. Syst. Sci. 2018, 49, 511–522. [Google Scholar] [CrossRef]
- Liu, Y.H.; Li, H.Y. Adaptive asymptotic tracking using barrier functions. Automatica 2018, 98, 239–246. [Google Scholar] [CrossRef]
- Sontag, E.D. Mathematical Control Theory; Springer: London, UK, 1998. [Google Scholar]
- Oort, E.V.; Sonneveldt, L.; Chu, Q. Comparison of adaptive nonlinear control designs for an over-actuated fighter aircraft model. In Proceedings of the AIAA Guidance, Navigation & Control Conference & Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Huang, H.; Luo, S.; Fu, W.; Li, Q. Fully Distributed Control for a Class of Uncertain Multi-Agent Systems with a Directed Topology and Unknown State-Dependent Control Coefficients. Appl. Sci. 2021, 11, 11304. https://doi.org/10.3390/app112311304
Liu Z, Huang H, Luo S, Fu W, Li Q. Fully Distributed Control for a Class of Uncertain Multi-Agent Systems with a Directed Topology and Unknown State-Dependent Control Coefficients. Applied Sciences. 2021; 11(23):11304. https://doi.org/10.3390/app112311304
Chicago/Turabian StyleLiu, Zongcheng, Hanqiao Huang, Sheng Luo, Wenxing Fu, and Qiuni Li. 2021. "Fully Distributed Control for a Class of Uncertain Multi-Agent Systems with a Directed Topology and Unknown State-Dependent Control Coefficients" Applied Sciences 11, no. 23: 11304. https://doi.org/10.3390/app112311304
APA StyleLiu, Z., Huang, H., Luo, S., Fu, W., & Li, Q. (2021). Fully Distributed Control for a Class of Uncertain Multi-Agent Systems with a Directed Topology and Unknown State-Dependent Control Coefficients. Applied Sciences, 11(23), 11304. https://doi.org/10.3390/app112311304